康耐视Insight说明

EB01_02 Lab-Getting Connected
1
连接连接实践实践
预期效果预期效果::
您可以在电脑上通过In-Sight Explorer Easy Builder View 进入In-Sight 系统(相机)。您可以打开In-Sight Explorer Easy Builder 软件创立一个现场相机与模拟器连接。通过观测相机在界面视图窗口中的显示对象与顶部标题栏的描述进行比较,验证您正使用的相机连接。
使用使用的的IN-SIGHT 功能功能::Easy Builder- User Interface (用户界面) - Application Step 1(应用步骤1)- Getting Connected (连接)
连接程序连接程序::
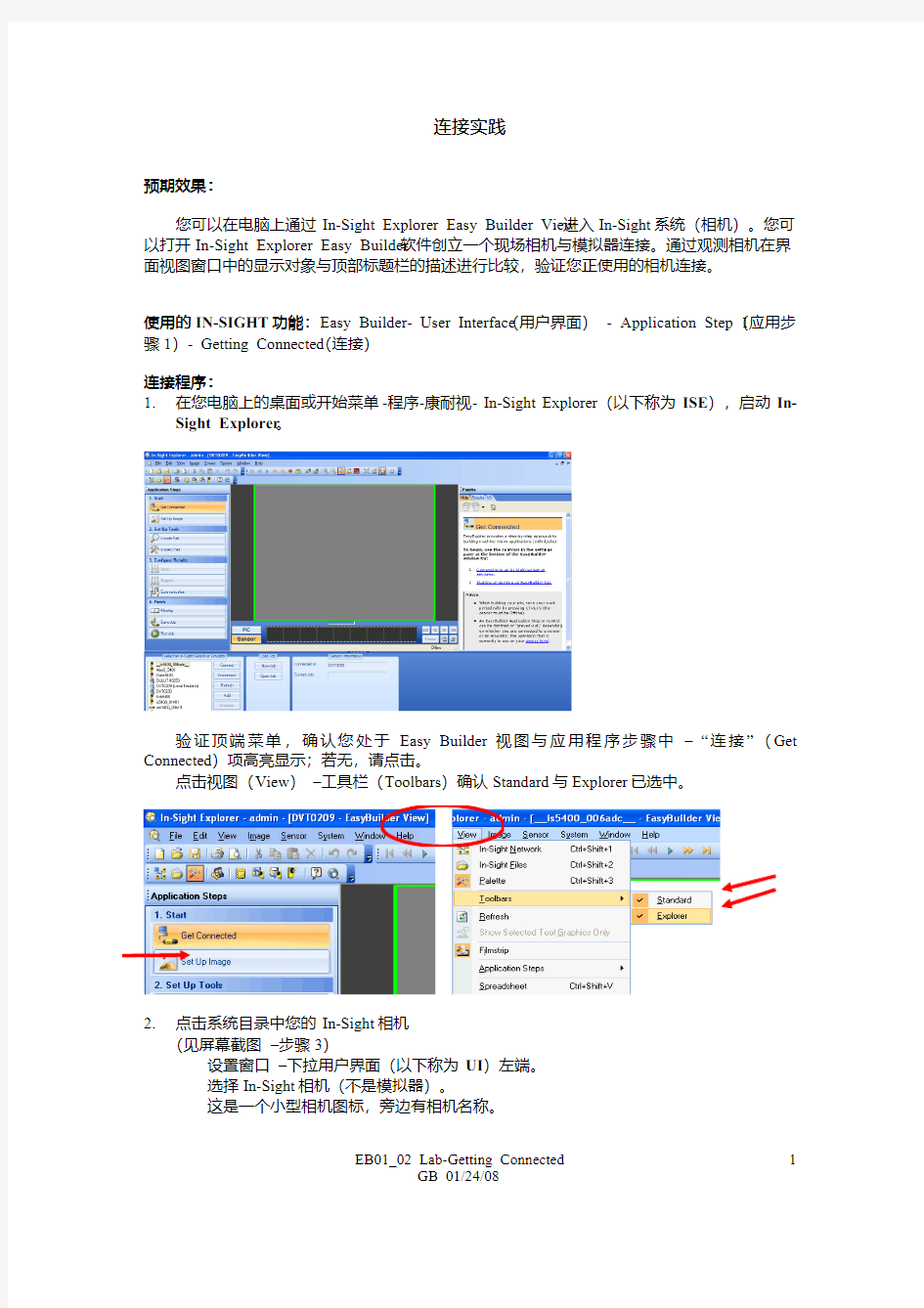
1. 在您电脑上的桌面或开始菜单-程序-康耐视- In-Sight Explorer (以下称为ISE ),启动In-
Sight Explorer 。
验证顶端菜单,确认您处于Easy Builder 视图与应用程序步骤中 – “连接”(Get Connected )项高亮显示;若无,请点击。
点击视图(View ) – 工具栏(Toolbars )确认Standard 与Explorer 已选中。
2. 点击系统目录中您的In-Sight 相机
(见屏幕截图 – 步骤3) 设置窗口 – 下拉用户界面(以下称为UI )左端。 选择In-Sight 相机(不是模拟器)。 这是一个小型相机图标,旁边有相机名称。
注意:默认名为相机MAC地址后6位。
在相机机箱顶端上
如相机不在列表中– 相机的循环电源 –等到60秒
3.点击连接(Connect)键
或双击相机
4.通过以下显示(A、B或C),验证您已连接至相机
A.在系统目录中,您的相机旁边出现网格图形
B. 您的相机名称/号码出现在UI
顶栏中
C. UI中央窗口出现图像或窗口,其从单调的灰色阴影转换到灰色以外的其他形式
注意:如果未出现图像但A和B已经得到确认,则说明您已经与相机相连接,但需要调整图像设置,该设置在UI应用程序步骤:“建立图像(Set Up Image)”中的下一实践中完成。
EB01_02 Lab-Getting Connected 2
康耐视视觉入门培训.
一、连接相机 1、根据康耐视接线说明书接好相机,通过网线连接上电脑。在PC端打 开in-sight浏览器。 2、打开“系统”菜单栏下的菜单项,或者右键点击In-Sight网络栏弹 出“将网络、设备添加到网络”: 查找出7402相机,如上图,其IP地址与PC不在同一个网段。 3、统一ip网段 点击“复制PC网络设置”, 输入125,点击“应用”,则把相机的ip地址设置为 “192.168.0.125”,让相机、pc都处于192.168.0.xxx网段 上。
4、打开相机 双击“is7402_13ad6e”,则打开相机,之前设置的开机自动加载 的作业(如pinwen.job)也打开。 “传感器”-》“启动”,设置相机上电后是否自动联机,设置自 动加载的作业。 二、新建作业(电子表格下) 1、转到电子表格视图 2、“文件”-》“新作业”,或者点击左上角相应工具
三、设置拍照参数 双击“Image”,如下,设置触发模式和曝光时间等参数,这里设置为 “手动”触发,即点击工具栏的触发图标或者按快捷键F5时,相机拍照。 四、校准 1、calibrateGrid 将坐标变换下的CalibrateGrid函数拖到一空白的电子表格B2: 点击“实况视频“,调整好标定板(或者标定纸,没有的话可以打印)和镜头焦距等,让标定板清晰现实在视野中央,双击鼠标(或者按enter 键):
点击下方“校准”按钮: 2、CalibrateImage 经过如此处理,实现了像素坐标系图像到毫米坐标系图像的映射。
五、训练模版 1、拿走标定板,把要查找的物品放到视野范围,按F5拍照 2、函数栏里,“视觉工具”-》“图案匹配”-》TrainPatMaxPattern 图像框选A0或B4,默认是A0。 3、双击“图案区域”栏: 调整紫色区,双击鼠标(或者点击“确定”图标,或者按“enter”键)。 模版训练完成。 六、查找模版 FindPatMaxPatterns,另外的FindPatterns类似。 1、图像设置为A0,则查找输出的位置坐标值(如上图的705.263,642.798)是 像素单位的;
康耐视视觉系统简介
康耐视视觉系统简介 (济南磊硕自动化设备有限公司) 一、关于康耐视 康耐视公司是世界上最受信任的视觉系统公司,产品遍布全球的工厂。从质量检测到批次跟踪,从装配检验到机器人引导,康耐视视觉系统孜孜不倦地通过多种方法优化质量和降低成本。产品广泛应用于医疗和制药、汽车、半导体和电子、食品和饮料、包装、太阳能等各个行业。 二、系统功能 康耐视(COGNEX)视觉系统有四大功能:引导、检测、测量和识别。 1、引导(Guide):导引定位(如零件定位、机器手引导、位置校准等)。 2、检测(Inspect):检测质量及装配(如零件是否存在、表面检测、缺陷检测、产品计数等)。 3、测量(Gauge):尺寸测量(如尺寸标注、确保误差等)。 4、识别(Identify):识别零件(如代码识别、代码验证、颜色识别、模型识别等)。 三、产品系列 康耐视(COGNEX)有四大产品系列:视觉系统、视觉软件、视觉传感器和ID读码器。 1、视觉系统——牢固耐用的多功能优化整合系统,用户界面简单易用,用于配置应用。 2、视觉软件——一套强大的康耐视视觉工具,用于连接照相机、板卡以及您所选择的外设。 3、视觉传感器——简单易用,经济实惠的传感器,取代光电传感器,实现更可靠的检验和零件检测。 4、ID读码器——完成一维、二维代码的读取和验证,用于直接零件标记或高速应用。分手持式和固定式。
四、典型行业和应用举例 1、汽车:检测零件存在与否 2、半导体和电子:检验晶片和模具质量 3、食品和饮料:验证过敏原标签是否正确 4、包装:用自动化系统进行堆垛 5、医疗:验证手术室中器械是否齐备 6、制药:在过度失真的字符上进行字符验证 7、一般制造:为元件级产品追踪提供代码读取 8、太阳能:检查日版上的裂缝、缺口及类似缺陷 9、纸张、塑料、无纺布的纹理检测:进行在线、实时的纹理检测 10、金属和玻璃表面检测:检测、识别和显示缺陷
Cognex康耐视相机操作使用说明书
康耐视相机操作使用说明书 文件状态: ■草稿□修改□定稿文档密级□不保密■内部□机密 项目名称 版本号 1.0 描述康耐视相机操作使用说明书 编写人余国鹰编写日期2015/9/10 审核人审核日期
目录 一、康耐视相机具体设置 (3) 1.1软件安装 ...................................................................................................... 错误!未定义书签。 1.2流程编辑 (3) 1.3C ODESYS通信注意事项 (6) 二、相机标定 (7) 2.1相机校准 (7) 2.2绝对坐标实现 (9) 2.3相对坐标实现 (10) 三、示教器示例程序 (11) 3.1绝对坐标实现范例 (11) 3.2相对坐标实现范例 (11) 四、CODESYS逻辑开发 (13) 4.1S OCKET通信开发 (13) 4.2外部点数据处理 (14) 五、细节说明 (17)
康耐视相机操作使用说明书 一、 康耐视相机具体设置 1.1 软件安装 双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。 1.2 流程编辑 1. 设置电脑本地连接IPV4地址为19 2.168.39.12(设置为39段即可)。 2. 双击康耐视In-Sight 浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。 图 1.1 3. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。 图1.2
康耐视3G视觉传感器产品指南
One Sensor does it all — Checker 3G P R O D U C T G U I D E
Any Product Many Checks One Sensor check check check check check check check check check part presence component presence feature presence part orientation correct part present number of parts part sorting position of part surface finish width of part width of component width of feature height of part height of component height of feature diameter of part diameter of feature diameter of hole Book Safety seal Panel gaps Tax stamp Knife Tabs Bottle insert Drink can Phone Pills Battery Golf ball Dowel pin Solder blob Foil lid Casting Stud Pen Scissors Moulding Wrapper Crank Weld nut Metal clip Box Label Spout Lead frame Spray nozzle Liquid level Door Carton Blister pack Model number Carton flaps Seal Button Bottle Hinge Clip Coupon Fuel line Keypad Bracket Handle Pinion Rivet Cable Toothbrush Connector IC leads Bolts Key Spray can Mould flash Spring Paint dot Capacitor Washer Cartridge Fastener Cam Fittings Bottle Cap Date code Medical device Air filter Glass LED Wouldn’t it be great if you could use the same sensor for all your product verification tasks? This is now possible with the new third generation Checker 3G from Cognex.With Checker 3G,you choose whether to use it as a Presence/Absence sensor or as a Measurement sensor.In either mode it can perform multiple “checks”on each product you manufacture.When designing Checker 3G,we threw away the sensor rule book,so you can throw away all those sensor catalogs. One sensor does it all...
康耐视工业机器视觉基础及应用六(视觉引导机器人操作与应用)
康耐视工业机器视觉基础及应用
模块六视觉引导机器人操作与应用 任务一视觉引导机器人简介 【学习目标】 1.了解视觉引导机器人的作业、功能与优势。 2.了解视觉引导机器人的调试步骤。 【相关知识】 视觉引导与定位是工业机器人应用领域中广泛存在的问题。对于工作在自动化生产线上的工业机器人来说,其完成最多的一类操作是“抓取-放置”动作。为了完成这类操作,对被操作物体定位信息的获取是必要的,首先机器人必须知道物体被操作前的位姿,以保证机器人准确地抓取;其次是必须知道物体被操作后的目标位姿,以保证机器人准确地完成任务。在大部分的工业机器人应用场合,机器人只是按照固定的程序进行操作,物体的初始位姿和终止位姿是事先规定的,作业任务完成的质量由生产线的定位精度来保证。为了高质量作业,就要求生产线相对固定,定位精度高,这样的结果是生产柔性下降,成本却大大增加,此时生产线的柔性和产品质量是矛盾的。 视觉引导与定位是解决上述矛盾的理想工具。工业机器人可以通过视觉系统实时地了解工作环境的变化,相应调整动作,保证任务的正确完成。这种情况下,即使生产线的调整或定位有较大的误差也不会对机器人准确作业造成多大影响,视觉系统实际上提供了外部闭环控制机制,保证机器人自动补偿由于环境变化而产生的误差。 理想的视觉引导与定位应当是基于视觉伺服的。首先观察物体的大致方位,然后机械手一边运动一边观察机械手和物体之间的偏差,根据这个偏差调整机械手的运动方向,直到机械手和物体准确接触为止。但是这种定位方式在实现上存在诸多困难。 直接视觉引导与定位是一次性地对在机器人环境中物体的空间位姿进行详细描述,引导机器人直接地完成动作。与基于视觉伺服的方法相比,直接视觉引导的运算量大大减少,为实际应用创造了条件,但这必须基于一个前提:视觉系统能够在机器人空间中(基坐标系中)精确测定物体的三维位姿信息。 视觉引导机器人(VGR) 优势: 1、减少昂贵的高精度固定设备。 2、无需工具转换即能处理多种类型的工件。 3、防止意外的机器人冲突。 应用包括: 1、自动堆垛和卸垛。 2、传送带追踪。 3、组件装配。 4、机器人检测。
康耐视视觉入门培训
康耐视视觉入门培训 Prepared on 22 November 2020
一、连接相机 1、根据康耐视接线说明书接好相机,通过网线连接上电脑。在PC 端打开in-sight浏览器。 2、打开“系统”菜单栏下的菜单项,或者右键点击In-Sight网络栏弹 出“将网络、设备添加到网络”: 查找出7402相机,如上图,其IP地址与PC不在同一个网段。 3、统一ip网段 点击“复制PC网络设置”,
输入125,点击“应用”,则把相机的ip地址设置为“”,让相机、 pc都处于网段上。 4、打开相机 双击“is7402_13ad6e”,则打开相机,之前设置的开机自动加载 的作业(如)也打开。 “传感器”-》“启动”,设置相机上电后是否自动联机,设置自动加 载的作业。 二、新建作业(电子表格下) 1、转到电子表格视图
2、“文件”-》“新作业”,或者点击左上角相应工具 三、设置拍照参数 双击“Image”,如下,设置触发模式和曝光时间等参数,这里设置为“手动”触发,即点击工具栏的触发图标或者按快捷键F5时,相机拍照。 四、校准 1、calibrateGrid 将坐标变换下的CalibrateGrid函数拖到一空白的电子表格B2:
点击“实况视频“,调整好标定板(或者标定纸,没有的话可以打印)和镜头焦距等,让标定板清晰现实在视野中央,双击鼠标(或者按enter 键): 点击“触发器”,则右上角现实找出的特征点数(276)。 点击下方“校准”按钮:
点击“确定”按钮,则校准完成。 2、CalibrateImage 经过如此处理,实现了像素坐标系图像到毫米坐标系图像的映射。 五、训练模版 1、拿走标定板,把要查找的物品放到视野范围,按F5拍照 2、函数栏里,“视觉工具”-》“图案匹配”-》TrainPatMaxPattern