宿州市交警支队高速公路区间测速设备

宿州市交警支队高速公路区间测速设备
采购项目需求
一、项目内容:
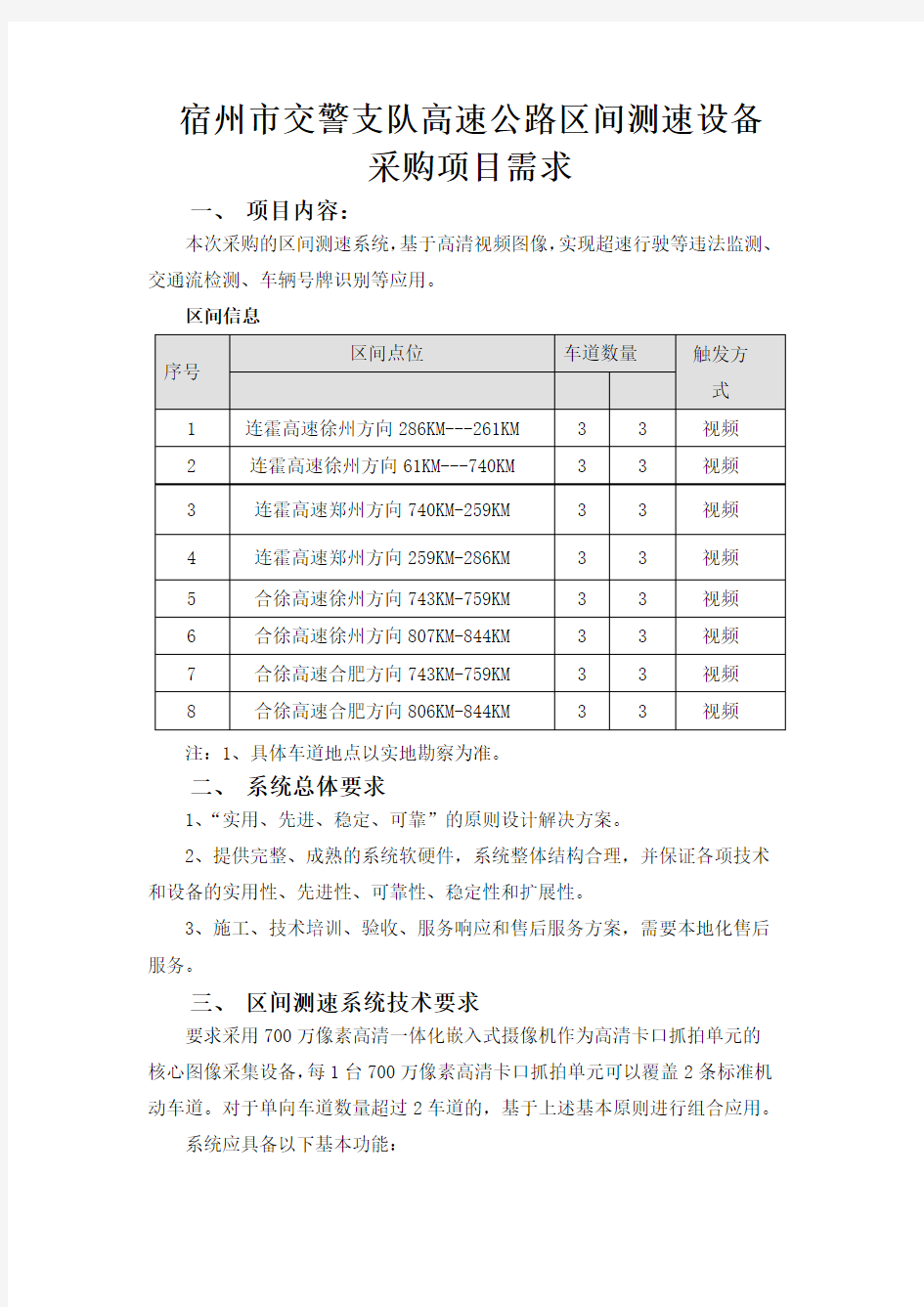
本次采购的区间测速系统,基于高清视频图像,实现超速行驶等违法监测、交通流检测、车辆号牌识别等应用。
区间信息
注:1、具体车道地点以实地勘察为准。
二、系统总体要求
1、“实用、先进、稳定、可靠”的原则设计解决方案。
2、提供完整、成熟的系统软硬件,系统整体结构合理,并保证各项技术和设备的实用性、先进性、可靠性、稳定性和扩展性。
3、施工、技术培训、验收、服务响应和售后服务方案,需要本地化售后服务。
三、区间测速系统技术要求
要求采用700万像素高清一体化嵌入式摄像机作为高清卡口抓拍单元的核心图像采集设备,每1台700万像素高清卡口抓拍单元可以覆盖2条标准机动车道。对于单向车道数量超过2车道的,基于上述基本原则进行组合应用。
系统应具备以下基本功能:
1、车辆捕获功能
系统应支持视频、地感线圈(或雷达)等检测模式,高清测速卡口必须具备地感线圈检测方式,投标人应在方案中做出相应描述。
要求区间测速起点和终点监控设备系统应具有实时采集机动车驶入、驶出测速区间时的车辆信息及全景特征图片的功能。区间测速起点和终点监控设备的车辆图像捕获率大于等于95%。除了能够捕获在车道上正常行驶的车辆外,还应该具备捕获跨线/压线和逆向行驶车辆的功能。
捕获的车辆图像位置适中,车牌清晰,图像上还应叠加通行时间、地点、方向、车道、车速、限速等信息。
2、速度测量和超速抓拍功能
测速卡口系统应能够进行速度检测,对超速车辆(限速值可以设定)进行抓拍、标记和报警提示,当机动车速度小于100km/h时,实测误差不超过
-6km/h~0km/h;当机动车速度大于或等于100km/h时,实测误差不超过机动车速度的-6%~0%km/h,并应具有手动抓拍功能。
3、图像记录存储功能
系统应对通过监测区域的车辆记录车辆全景图像;对超速等违法车辆记录两张不同时间的车辆全景图片。系统记录的车辆信息除车辆图像信息外,还应记录车辆的通行信息,如时间、地点、车速、限速、方向、号牌号码、号牌颜色、车道编号等,并将相关信息叠加到图片上。实现车辆采集、车辆号牌全自动识别、以及相关控制数据存储等功能。
车辆图像捕获时应不受雨、雪、雾等天气、环境光和相临车道通行车辆的影响而出现误记录。在环境无雾包括雨雪天气下,监控区域内规范行驶的车辆被记录的图片应能清晰看清车辆前部所有特征、前排司乘人员面貌衣着,还应能看清车辆类型、颜色和所载货物等。
4、区间测速功能
区间测速系统必须符合GA/T 959-2011《机动车区间测速技术规范》和GA/T 497-2016《道路车辆智能监测记录系统通用技术条件》标准的技术要求。
系统根据号牌识别结果,及不同监控点同一号牌车辆通过的时间差自动计算车辆路段平均车速,并判断是否超速。对超速违法车辆,系统应能记录通过
两个断面时的通行数据信息:时间、地点、车速、车牌号码等,并将两张断面的静态车辆图片合并成一张图片进行存储。
5、车牌识别功能,同电子警察系统技术要求。
6、布控/撤控报警功能
系统应具有针对超速车辆、黑名单里的被盗抢车辆和交通肇事逃逸车辆能实时布控报警,具有现场报警和远程报警功能。
可设置布控/撤控时间,布控时间内当通过车辆与用户事先录入的被盗抢车辆或交通肇事逃逸等黑名单车辆的牌照号码及车型等信息特征相符合时,系统在现场可以立即以声光进行报警,提醒值班人员有可疑车辆通过。
7、流量统计功能
系统可根据需要,按时段、车型、车道、方向进行查询,并进行车流量统计,统计结果可以统计的信息可以多种形式打印输出,并自动生成相应报表,如日报表、周报表、月报表、年报表等。
8、断点续传功能
系统应支持多种方式的数据传输。可通过FTP方式自动上传违法数据、车辆通过信息(时间、地点、车牌号码等)、设备监测数据、流量统计数据等到中心管理系统;也可在中心通过TCP/IP网络下载操控前端设备。如因网络中断或其它故障,信息备份存储于前端设备中,待故障恢复后自动上传。
9、设备管理功能
系统应提供设备编号、设备时钟、设备运行状态监测设置等设备参数配置,可通过前端人机交互界面进行现场配置,也可以在中央远程配置及获取校验。具备故障自动检测功能,能通过软硬件自动检测系统故障并恢复正常工作。应具有断电自动重启复位、自动侦错报错、自动监测主要设备(摄像机、服务器等)等远程维护功能,并提供设备故障报警、系统现场登陆等信息。
10、查询功能
系统应能对车辆通行信息、车辆违法信息、布控/撤控信息、系统运行日志信息、系统操作日志等信息按不同条件进行查询统计。包括通行车辆的实时监控、车辆精确查询、模糊查询、布控查询、报警查询、通行车辆流量统计等功能,查询的信息可以多种形式打印输出。
11、权限设置和日志记录功能
系统应具备权限管理设置功能,能够对不同对象分配不同类型的使用权
限。
系统应具备日志记录功能。可记录主要设备、网络状态日志和主要运行软
件的工作日志,还能记录设备或者网络状态改变(重启、或者重新连接)、主
要软件发生重启或故障等事件日志。
系统应具有时钟校时功能,24h内设备的计时误差不超过1.0s。
12、水印加密防篡改功能
系统应具有水印加密功能,图像、录像在前端摄像机内部进行加密处理,防止在传输、存储、处理等过程中被人为修改,管理中心在接收到前端传回的
图片、录像时需要进行算法验证,确认是否有被篡改,保证执法的真实、公平、公正。
四、主要设备技术要求
1、700万像素高清摄像机
包含高清一体化嵌入式摄像机、高清镜头、室外防护罩、网络信号防雷器、电源适配器等。
1、图像传感器:应采用1英寸Progressive Scan CCD;
2、最大图像尺寸:≥3408×2008像素;
3、视频帧率:帧率在1~25fps可调;
4、支持JPEG图片、H.264视频流同时输出;
5、最低照度:彩色≤0.03lx@(F=0.95);分辨力:≥1600TVL;
6、快门模式:应支持三种独立快门:视频快门、录像快门、抓拍快门;
7、视频压缩标准:H.264/MJPEG;
8、★系统双备份功能:设备的操作系统文件具有双重备份功能,当一个备份文件损坏或异常时,设备仍可正常运行;(提供公安部检验报告证明)
9、★抗丢包能力:应具有抗丢包(5%)处理能力;
10、机动车、行人和二轮车捕获功能:应具备机动车、行人和二轮车捕获功能;
11、★车牌区域增强编码功能:应支持车牌区域增强编码功能;
12、支持车牌宽度范围从80*25到1200*380像素,倾斜角度范围从0到40
度的车牌识别;
13、具备车牌识别功能,白天识别准确率≥96%,晚上识别准确率≥95%;
14、★可识别13种车型,包括:大客车、中型客车、大货车、中型货车、小货车、面包车、三厢轿车、两厢轿车、微型轿车、SUV-MPV、槽罐车、皮卡车、轿跑等。在抽测三厢轿车、小货车、SUV-MPV、面包车等车型时,白天准确率≥97%;晚上准确率≥95%;
15、★车身颜色识别功能:设备应可识别11种车身颜色,包括:红、黄、蓝、绿、紫、粉、棕、白、黑、银(灰)、青,车身颜色识别准确率≥97%;
16、★车标识别功能:设备应可识别250种车标,白天识别准确率≥97%,晚上识别准确率≥87%,具备新能源车牌识别功能;
17、字符叠加功能:应可在抓拍图片上叠加抓拍时间、地点、车道号、限速值、车长、车速、车身颜色、车牌号码等信息;
18、通讯接口:10M/100M/1000M自适应RJ45接口≥1个, RS-485接口≥1个;
19、★支持图像旋转,可配置90°、180°和270°旋转配置功能,适用于走廊模式和镜像应用模式,支持虚焦检测,并可主动报警;
20、触发输入:≥4路外部触发输入,触发输出:≥3路(光耦隔离2500VAC),可作为补光灯同步输出控制;
21、★具备温度和湿度感应功能,并且可通过web或客户端配置温湿度阈值,控制散热风扇;
22、电源适应性:电源电压在AC220V±25%范围内变化时,设备应能正常工作,工作环境温度:-30℃~+70℃,防护等级:外壳防护等级应不低于IP66;
★以上含★参数需在公安部检测报告中体现,提供检测报告复印件并加盖厂家公章以证明设备主要参数真实性,产品符合GB/T28181-2016《安全防范视频监控联网系统信息传输、交换、控制技术要求》标准,提供公安部检测机构出具的GB/T28181-2016检验报告,提供产品厂家授权和售后服务承诺书原件并加盖厂家公章;
2、星光级高清高速球机
1、★摄像机靶面尺寸不小于1/1.8英寸,摄像机内置镜头,支持31倍光学变倍,镜头最大焦距不小于186mm;
2、视频输出支持1920×1080@60fps,1280×720@60fps,分辨力不小于1100TVL;
3、★支持最低照度可达彩色0.0005Lux,黑白0.0001Lux,红外照射距离不低于430m,信噪比≥58dB,网络延时不大于100ms;
4、支持18条巡航扫描,每条可添加300个预置点,支持守望功能,预置点/花样扫描/巡航扫描/自动扫描/垂直扫描/随机扫描/帧扫描/全景扫描可在空闲状态停留指定时间后自动调用(包括上电后进入的空闲状态);
5、支持三码流同时输出,主码流、第三码流同时支持1920×1080@60fps,1280×720@60fps;
6、★采用高性能平台,性能可靠稳定,支持水平手控速度不小于650°/S,水平旋转范围为360°连续旋转,垂直旋转范围为-35°~90;
7、★支持采用H.265、H.264、视频编码标准,H.264编码支Baseline/Main/High Profile,音频编码支G.711ulaw/G.711alaw/G.726/MP2L2/AAC;
8、★支持1路音频输入和1路音频输出,7路报警输入,2路报警输出;
9、★支持区域入侵、越界入侵、徘徊、物品遗留、物品移除、音频异常、人脸检测、人员聚集、快速移动、进入区域、离开区域,并联动报警;
10、★支持行人、非机动车抓拍功能,非机动车抓拍,可对自行车、电瓶车、摩托车、三轮车进行抓拍;
11、★支持透雾、强光抑制、电子防抖、宽动态不小于106dB;
12、★支持道路信息设置,道路信息可随球机转动变化显示;
13、★支持集中布控功能,设备能够响应平台下发的集中布控命令,调整方向至目标位置;
14、★具备较好防护性能,支持IP67,TVS 6000V防雷、防浪涌、防突波,工作温度范围可达-45℃-70℃;
★以上含★参数需在公安部检测报告中体现,提供检测报告复印件并加盖厂家公章以证明设备主要参数真实性,提供产品厂家授权和售后服务承诺书原件并加盖厂家公章;
3、中心平台软件
1)实时视频监控:通过C/S客户端和B/S客户端,能够单画面或多画面分割预览实时视频图像。多画面的显示方式包括:4/6/9/13/16画面等。对于单画面显示,用户可以选择原始比例显示和全屏显示两种方式。
2)监控轮巡:可以根据前端的设备厂家、设备类型(DVR、NVS、IPCamera 等)、组织机构、应用场所、管理部门等进行轮巡分组设置。系统按照设定好的规则,在C/S客户端监控视图界面进行自动的监控图像轮巡显示。根据业务需要,可以分为组内轮巡、分组轮巡、组合轮巡、分时轮巡等。
3)语音对讲:系统通过DVR或IPC的视频输入通道实现对现场声音的实时监听和视频音频同步录像。通过DVR或IPC的双向对讲接口,实现与现场人员的远程双向对讲,并实时录音。
4)视频回放:系统支持按照文件类型、日期、通道对录像文件进行检索,检索成功后进行远程回放。支持单画面/多画面、单进、快进、快退、暂停、停止、剪辑、抓帧、录像下载等。支持视频预览时的“即时回放”功能,可以对同一路通道的录像资料,分为几个不同的时间片段来回放,方便快速定位所需要的录像片段。
5)视频抓拍(抓录)功能:用户在实时预览视频图像或者回放视频录像时,发现可疑行为、重要线索等情况,可进行图像抓拍(或抓录)。
6)视频加密:对于个别特殊的监控画面,可以设定保密功能,只有经过特别授权的人员和局主管领导才能有权查看实时视频和录像资料或下载录像片断。
7)具备统一的、图形化的电子地图操作界面,能够以地图展示界面和管理操作界面面对用户;可对地图对象进行操作(放大、缩小、漫游、移动等);可进行距离测量、面积测量等地图测量;支持矢量图、影像图和矢量影像图。
8)可对地图进行编辑、定义、图层控制以及地图数据库维护,并可建立监控点图层,标注各类监控设备位置和类型,支持对各类设备在地图上进行图形化展示。
9)可根据查询类型和关键字搜索相关路口、监控点等资源。
10)支持视频监控设备(网络枪机、球机等)、存储设备(DVR、NVR、CVR
等)、平台服务器(CMS、DB等)、编解码设备、矩阵设备等资源的统一注册、鉴权、接入配置,能对设备进行统一编码、远程设置/批量配置。
11)可根据用户需求,设置分级的组织机构或监控区域、及分配对应管理的路口或设备等资源。包括组织机构管理和资源管理。
12)支持用户管理:用户分为系统管理人员(面向系统、网络、设备等)与应用操作人员(业务流程与操作)两大类;并对应到组织机构,每一用户都有自己的用户信息和隶属角色。能够根据前端设备所支持的用户数量、连接数等的限制,对登录用户数量进行限制。所有登录系统的用户都必须通过系统设计的安全认证,系统支持用户名与密码、捆绑IP地址等认证方式。
13)支持运维管理,实时统计前端设备的状态。
1、不接受联合体投标;技术参数设备清单中加“★”必须满足。
2、供货安装期、交货地点
供货安装期:30天,交货地点:甲方指定。
3、★本项目非简单的设备供货,各潜在投标人需对每个安装现场进行勘察,并充分理解招标方的使用需求,不进行现场勘察,将被废标;
4、区间测速设备需具备能够清晰辨认驾驶室驾驶人脸部特征,高速公路安装设备具备清晰辨认功能机动车前部全貌全景特征和驾驶室驾驶人脸部特征等信息的功能。可依托公安交通集成指挥平台,通过整合高速公路路网视频图像、人车识别、交通流量、交通事件、交通环境、交通运行管控等动态数据并进行交互处理,智能分析研判事故隐患、交通拥堵、重点车辆运行、交管业务运行等高速公路交通安全态势,并进行可视化展示和预警提示,实现跨平台信息共享和关联应用,面向各方提供管理、运营技术支撑,为广大人民群众提供优质、高效、安全、舒适的出行服务。
沪宁高速公路测速点全记录
沪宁高速公路测速点全记录! 经常在沪宁高速走.看到有的兄弟在沪宁高速走时老是收到通知单,为了替大家服务好,本人此次携带专业设备,对路上的探头进行了标定.现将有关结果向大家回报如下:1、距南京收费站三公里处,有一个测速点,在绿化带中. 2、在黄栗墅服务区往南京方向1公里处(在第二个跨线桥上),在桥上安装了四个测速探 头,对四个车道进行全面测速. 3、在标线258至259中间段,有一个测速点,安装在绿化带中 4、在标线135至136中间段,有一个测速点,安装在绿化带中 苏州新区---南京: 1、进入无锡后,离硕放出口处4公里,有一测速头 2、离玉祁出口处2公里处,有一测速头 2、沪宁高速最后一个休息站(黄粟墅)两公里后处,有一个测速头。 南京-----苏州新区 1、出南京收费站后3公里处,有一测速头 2、出南京收费站后10公里处,有一测速头 上述测速头均披上伪彩网,并且前方有闪光灯,估计晚上也能测速。 沪宁高速公路南京段有开始启用固定测速装置,大家小心! 一、镇江至南京方向: 1、汤山出口处测速仪安装在中央隔离带内,有闪光灯,晚上也测! 2、黄栗墅服务区出口往南京方向第二座横跨高速公路的天桥上(背面),最最狠毒!车没过天桥前什么也看不到,但如果你超速过去,十二个探头怎么也放不过你,等着到收费站交罚 款吧. 3、黄栗墅服务区出口往南京方向约2公里,测速仪安装在中央隔离带内,有闪光灯, 晚 上也测! 二、南京至镇江方向(以南京高速公路收费站算起点,预计里程): 1、约2.4公里测速仪安装在中央隔离带内,有闪光灯,晚上也测! 2、约13.3公里测速仪安装在中央隔离带内,有闪光灯,晚上也测!
高速公路车辆超速抓拍系统技术方案
高速公路车辆超速抓拍系统技术方案 本方案根据招标方要求特为某高速公路A至B段设计,目的为设置车辆超速抓拍系统,对违章超速车辆进行抓拍取证,协助交警进行执法工作。这五套系统分别安装于本路段的跨线桥上,由高清晰抓拍摄录一体机采集机动车牌照原始数据、机动车辆轮廓原始数据及驾驶人脸像原始数据,完整记录通过这一路段的机动车辆的信息,包括时间、地点、车速和图像,并将该类信息上传至上端软件进行后期处理。 R系统采用Maxfort全NVC500E系列高清晰抓拍摄录一体机进行前端的车辆抓拍,图像分辨率达到500万像素,并直接输出JPEG压缩格式的高清晰图片(抓拍图片效果图如下图示) 在本系统中,车辆检测采用地面感应线圈检测器,检测器提供NVC500E触动信号,触动信号用来启动NVC500E的抓拍动作。每条车道埋设双线圈用来测速和分辨车型。通讯协议采用TFTP和FTP,前端信息透过网络光纤收/发器和光纤线路以大于10M的速率与上位机通讯。现场的供电电源就近引取。上位机软件提供功能:图像处理、图像存储、图像查询、牌照识别、前端设备设置、系统运行监控、系统数据库维护、设备维护等功能。车牌识别采用在线式后台识别的方式进行,抓拍图片上传后,由上位机进行识别,识别结果根据设置写入违章图片附属信息。由于本系统采用了先进的专业抓拍设计的NVC500E一体机,使得系统具有组成结构简洁、实现系统功能直接、系统响应迅速等特点,与传统的及非专业设备组成的系统相比较有明显的优势。 一、系统设计思路和原则 (一)设计思路 经济性充分利用成熟的先进技术,采用性价比较高的产品。可靠性采用专业的技术和产品,保证系统的高质量和高稳定性。采用先进的容错技术,提供详尽的故障处理方案,保证系统的快速可恢复性。先进性系统设备的选型及软件设计,均采用了代表当今计算机发展方向,图像处理发展方向以及通讯技术发展方向的技术,符合当今IT技术的发展潮流,并易于升级更新,保持其先进性。
区间测速方案分解
卡口区间测速系统设计方案 设 计 方 案 书 技术股份有限公司 二00九年五月
1 区间测速系统 1.1概述 传统超速抓拍系统采用的是单点测速方式,测量的是车辆的瞬时速度,争议较大、容易躲避。区间测速是在高速公路某一区间(一般为20公里左右)的两端安装自动抓拍系统,记录车辆通过两端的时间,利用“速度=距离/时间”公式,计算出车辆在该区间内的平均车速。为达到满意的效果,抓拍系统应具有很高的车辆捕获率和识别正确率。区间测速让驾驶员难以回避,做为处罚超速违法行为的法律依据将更有说服力。区间测速与单点测速相比有如下优势: 1.监控范围大。区间测速系统由于对监控路面进行长距离监控,对该区间内行驶的机动车进行全程监控,扩大了超速监控的范围,控制了区间内整体的行车速度。 2.测速精度高。区间距离为两个监测断面之间的距离,通过激光测量标定,距离误差几乎为零;机动车行驶时间为经过两个监测断面的时间差,所有断面点设备时间同步,并采用GPS时钟校时,时间误差小。 3.“反监控”能力强、监控效果显著。机动车驾驶员常利用电子狗等高科技设备提前发现电子警察并进行逃避;在单点测速或监控点周边地段刹车减速,经过监控点后继续超速行驶;这类具有反监控能力的违法超速车,在区间测速系统监控下将无所遁形。 4.说服力强,更容易被理解和接受。区间测速系统测速原理简单,精度高,监控范围为全区间,控制区间内的平均车速,更容易被驾驶人接受。 5.可拓展性更强。根据应用的需要,区间测速系统可以扩展更多的应用功能,如:道路监控功能、治安(交通)卡口功能、交通流采集功能、非法占用路肩等违法取证功能(路肩加设备)、交通诱导功能(加诱导屏)等。
高速公路监控联网系统方案课件
高速公路监控联网系统设计方案 码科技有限公司 二〇一〇年六月
目录 第一章概述 (5) 第二章项目需求 (5) 第三章设计依据及原则 (6) 3.1设计依据 (6) 3.2系统设计原则 (7) 3.2.1先进实用 (7) 3.2.2可靠稳定 (8) 3.2.3升级维护 (9) 3.2.4符合规范要求 (9) 第四章系统具体设计 (9) 4.1收费站监控子系统设计 (10) 4.1.1收费站广场监控设计 (10) 4.1.2收费亭监控设计 (11) 4.1.3车辆特写监控设计 (11) 4.2服务区监控系统设计 (11) 4.3道路监控系统设计 (11) 4.3.1道路交通流量、事故、异常行车状况、洒落物体监控 (11) 4.3.2 车辆测速、车牌识别、流量统计系统(卡口子系统) (13) 4.4线路传输系统设计 (14) 4.5 收费站分控中心设计 (18) 4.6交管部门管理中心设计 (19) 4.6.1 管理中心服务器设计 (19) 4.6.2视频数据转发设计 (21) 4.6.3中心大屏显示设计 (23) 4.6.4监控点实时预览回放功能设计 (26) 4.6.5 心跳检测系统设计 (28) 第五章系统防雷设计 (29) 5.1工程概述 (29) 5.2雷击防护措施 (30)
5.2.2户外摄像枪接地及地网 (30) 5.2.3地网施工程序: (31) 5.3感应雷防护 (31) 5.3.1设备前端的感应电防护 (31) 5.3.2传输线路的防护 (32) 5.3.3传输线路的布线 (32) 5.3.4监控室设备防雷 (33) 5.4屏蔽措施 (36) 5.5等电位连接与共用接地 (36) 第六章系统硬件设计 (37) 6.1摄像机 (37) 6.2 光端机 (43) 6.3硬盘录像机 (46) 6.4 数字矩阵 (48) 6.5监视器 (53) 6.6服务器主机 (54) 第七章系统特点 (59) 第八章项目施工设计 (61) 8.1主要施工工序 (61) 8.2管施工 (61) 8.2.1 穿线管施工 (61) 8.2.2、线缆敷设实施 (61) 8.3 闭路电视监控系统施工方案 (64) 第九章培训计划 (69) 9.1培训对象 (69) 9.2培训目标 (69) 9.3培训方式及内容 (70) 9.3.1 授课培训 (70)
高速公路智能视频监控系统 解决方案
高速公路智能视频监控系统解决方案 目录一、前言.3 二、高速公路智能视频监控系统.3 2.1 系统概述3 2.2 系统构成4 2.3 系统功能5 2.3.1 流量监测.5 2.3.2 烟、火、雾监测.6 2.3.3 违章(超速、违章左/右转、变线、逆行、停车等)8 2.3.4 遗洒物体.9 2.3.5 行人横穿/进入公路.9 三、设备介绍.10 3.1 前端设备10 3.2 视频分析设备11 3.3 终端设备12 四、服务承诺.14 高速公路智能视频监控系统解决方案 一、前言 高速公路是国家经济发展的命脉,是人民大众工作生活不可缺少的重要组成部分.如 何高效、科学的管理高速公路是摆在高速公路管理部门面前的重要议题. 传统的高速公路监控系统主要关注在收费站、服务区、隧道/大桥等.完成车辆收费、 车牌记录、重点地段监控等基本功能.但随着高速公路基础建设的不断完善,对整个高速 公路的总体服务质量也提出了更高的要求.如何即时发现道路上发生的问题,并即时预警 和通知车主,带来更高的客户满意度,是高速公路业主面临一个新的焦点问题. 沈阳天目科技有限公司是由归国留学人员创办的高科技企业,立足于把世界上最先进 的视频分析技术带到中国.基于计算机视觉、人工智能、数字信号处理的视频分析技术使得摄像机具备人脑分析功能,可以实时的对监控画面分析判断并对紧急情况和事件进行处理(显示、报警等).应用到高速公路监控领域,可以自主分析道路情况,实现流量控制、 自动记录各种违章行为、烟、火的自动监测、行人穿道路报警等一系列智能功能.可以说, 视频分析技术将彻底改变传统监控系统被动的录像查询功能,向更智能化、更人性化的方向发展. 二、高速公路智能视频监控系统 2.1 系统概述 传统高速公路监控系统完成的基本功能主要包括进出车辆情况登记和重点路段的情况 监测.车辆情况登记可以通过设置在卡口的车牌识别摄像机和视频摄像机完成,重点路况的监测则需要职守人员自主控制调度多处分布在不同地点的摄像机完成.其缺点在于: 1. 高速公路里程远远超过所安装的摄像机能覆盖的范围,很多路段情况不能够得到及 时有效的处理; 2. 即使安装大量监控摄像机,由于职守人员的精力、注意力有限,不可能同时对所有摄 像机情况进行及时处理; 以上两条造成了高速公路的监控系统只能作为事后查证的依据,没有起到及时发现及时 处理的工具,更没有在危险到来之前主动预警的功能. 高速公路智能视频监控系统解决方案 沈阳天目科技有限公司 4
区间测速方案
区间测速方案
卡口区间测速系统设计方案 设 计 方 案 书 技术股份有限公司
二00九年五月 1 区间测速系统 1.1概述 传统超速抓拍系统采用的是单点测速方式,测量的是车辆的瞬时速度,争议较大、容易躲避。区间测速是在高速公路某一区间(一般为20公里左右)的两端安装自动抓拍系统,记录车辆通过两端的时间,利用“速度=距离/时间”公式,计算出车辆在该区间内的平均车速。为达到满意的效果,抓拍系统应具有很高的车辆捕获率和识别正确率。区间测速让驾驶员难以回避,做为处罚超速违法行为的法律依据将更有说服力。区间测速与单点测速相比有如下优势: 1.监控范围大。区间测速系统由于对监控路面进行长距离监控,对该区间内行驶的机动车进行全程监控,扩大了超速监控的范围,控制了区间内整体的行车速度。 2.测速精度高。区间距离为两个监测断面之间的距离,通过激光测量标定,距离误差几乎为零;机动车行驶时间为经过两个监测断面的时间差,所有断面点设备时间同步,并采用GPS时钟校时,时间误差小。 3.“反监控”能力强、监控效果显著。机动车驾驶员常利用电子狗等高科技设备提前发现电子警察并进行逃避;在单点测速或监控点周边地段刹车减速,经过监控点后继续超速行驶;这类具有反监控能力的违法超速车,在区间测速系统监控下将无所遁形。 4.说服力强,更容易被理解和接受。区间测速系统测速原理简单,精度高,监控范围为全区间,控制区间内的平均车速,更容易被驾驶人接受。
5.可拓展性更强。根据应用的需要,区间测速系统可以扩展更多的应用功能,如:道路监控功能、治安(交通)卡口功能、交通流采集功能、非法占用路肩等违法取证功能(路肩加设备)、交通诱导功能(加诱导屏)等。 1.2 系统设计原则 1.2.1标准化 该系统严格按照公安部颁标准《公路车辆智能监测记录系统通用技术条件》(GA/T 497-2004)规定的技术要求进行设计,同时,在采用高清摄像技术方面又进行了功能和性能上的扩展。 1.2.2可扩展性和兼容性 由于用户以后的需求会不断发展,系统建设的数量将随之扩大,在设计上,即要在功能上推陈出新,又要兼容旧的系统,以保护用户的投资,因此我们采用模块化设计,模块间数据传输均采用标准的传输协议,任何一个模块的升级短期内都不会影响到其它模块的正常应用。 1.2.3可用性 我们的方案在充分考虑用户实际情况,针对大多数用户的需要,设计出可满足各种需要的方案,并充分考虑了人为不可抗拒的其他因素造成故障的可能性;同时,也必须摒弃已经安装应用的老的系统出现的各种影响系统稳定性的技术。 1.2.4易用性 系统采用嵌入式一体化抓拍主机,模块化的设计使安装使用非常方便。用户只需简单的接线,并按相应的调试程序进行安装调试就可达到最佳的应用效果。所有实时监控、牌照识别、实时上传等工作,均为完全智能控制,不用单独设置。
高速公路区间测速系统
高速公路区间测速系统 目前区间测速已綷-不算是什么新名词了,国内已綷-有越来越多的城市和地区如上海、杭州、青岛等都已綷-采用区间测速这种形式作为一种有效的违法取证模式。 区间测速系统是基于先进的车辆抓拍技术、车辆牌照自动识别技术、网络通讯技术,来实现的一种新型的超速违法取证系统。该系统通过计算车辆通过路段平均速度的方式来判断是否超速,有效解决了单点测速的易躲避性,更有效地控制超速与减少超速等违法行为的发生。 通过安装在高速公路上的车辆自动抓拍系统,连续不断地捕获车辆图片、识别和记录多个断面上实时通过的车辆信息,包括车辆号牌、通过时间、车辆全景图片、各断面点速度等,将这些信息通过网络(有线或无线)上传至中心处理平台,比对同一车辆在同方向两个断面的通行时间,再根据两个断面间的距离来计算该车辆通过此路段的平均速度,最后根据平均速度判断是否超速。如存在超速行为则自动将违章车辆的数据及图片等相关信息通过后台管理平台进行声光报警,并可根据需要以短信的形式发送给附近和现场的值勤交警,或将信息发布在高速公路显示屏上,以对违章车辆进行及时告知和警示更多的车辆。系统处理得到的所有违章车辆及相关图片将作为违章信息源提供给违章系统作进一步处理。
系统设计目标 1、实用性 系统以现行需求为基础,应采用当今国内外先进的软硬件应用技术,选择性价比较高的产品,适应未来发展的要求。另一方面,采用的系统硬件设备应该已广泛安装应用,充分考虑交通管理发展需求,充分保障项目后续维护工作。 2、技术先进性和成熟性 在设计思想、系统架构、所采用的技术、选用的平台上均具有一定的先进性、前瞻性,并考虑到一定时期内的变化趋势。在充分考虑架构先进的同时,采用技术成熟、市场占有率高的产品,从而保证建成的系统具有良好的稳定性。 3、标准化 系统设计、开发、建设遵裓-公安部相关标准,并使产品标准化。 4、兼容性和易维护性 系统选用的主要软硬件设备、接口采用国家通用标准,不仅具有较好的兼容性,而且具备较好的开放性和升级扩展能力,随着未来业务的发展,便捷地扩展系统规模,最大限度地保护已有投资。 5、可靠性和安全性 系统采用所有硬件均为嵌入式一体化设备、结构采用分布式结构,系统配置灵活、布局合理,能够满足长时间稳定运行。同时系统采用DSP水印加密技术,从数据源头对数据加密,从根本上解决数
雷达测速的应用与基本原理
雷达测速的应用与基本原理 应用 在交通工程上,速度是计量与评估道路绩效和交通状况的基本重要数据之一。速度数据的搜集方法有许多种,包括人工测量固定距离行驶时间、压力皮管法、线圈法、影像处理法、雷达测速法与激光测速法等。其中后两者属于携带容易而且精确度高的方法,因此广受采用。 超速行车在交通违规中占有极大比例,此一现象可从高速公路过去四年间违规告发项目中,超速案件比例均在三分之二左右看出端倪,而超速行车一直被认为是肇事之重要因素之一;因此从交通执法观点而言,取缔超速系比较具体的维护交通安全之手段。国内取缔违规超速一向以雷达测速枪当工具,径行举发案件则辅以照相设备;只是近年来,雷达侦测器盛行,价格普及化之后,即使法规明令禁止使用,一般民众仍趋之若鹜,因为其价格只需逃避一至两次取缔的机会即可完全回收成本。以交通工程观点来看,驾驶人若装有雷达侦测器,则路边定点所测得的车速即会因驾驶人感知受测速,误以为警察人员执行取缔而有普遍减速现象;除造成数据失真外,并因而有引起事故之可能。 折叠编辑本段基本原理 雷达为利用无线电回波以探测目标方向和距离的一种装置。雷达为英文Radar一字之译音,该字系由Radio Detection And Ranging一语中诸字前缀缩写而成,为无线电探向与测距之意。全世界开始熟悉雷达是在1940年的不列颠空战中,七百架载有雷达的英国战斗机,击败两千架来袭的德国轰炸机,因而改写了历史。二次大战后,雷达开始有许多和平用途。在天气预测方面,它能用来侦测暴风雨;在飞机轮船航行安全方面,它可帮助领港人员及机场航管人员更有效地完成他们的任务。 雷达工作原理与声波之反射情形极类似,差别只在于其所使用之波为一频率极高之无线电波,而非声波。雷达之发射机相当于喊叫声之声带,发出类似喊叫声之电脉冲(Pulse),雷达之指向天线犹如喊话筒,使电脉冲之能量,能集中某一方向发射。接收机之作用则与人耳相仿,用以接收雷达发射机所发出电脉冲之回波。 镭射的英文为Laser,这个字是由Light Amplification by Stimulated Emission of Radiation的第
黄山市高速公路各测速点位置及限速
黄山市高速公路各测速点位置及限速 杭瑞(徽杭)高速(一大队)3处: 168公里处限速100,往杭州方向 177公里处限速100,往杭州方向 199公里100米处限速100,往歙县方向 京台(合铜黄)高速(高速三大队2处、二大队3处)5处:1326公里800米(岩寺入口附近、正反方向均拍摄、限速100)往黄山方向1337公里926米(屯溪西收费站附近、限速120)往屯溪方向 1291公里200米(香河遂道内、限速80)往合肥方向 1275公里600米(太平遂道出口附近、限速100)往合肥方向 1249公里800米(太平湖服务区往黄山300米左右、限速100)往黄山方向黄塔桃高速(四大队)3处: 杭瑞高速231公里900米(青山观景台附近、限速100)往江西方向 京台高速1371公里500米(马金岭遂道内、限速80)浙江往黄山方向京台高速1362公里700米(小贺枢纽处、限速120)黄山往浙江、江西方向 各位同学,高速公路每公里都在路边标有公里数,大家留意一下就清楚。徽杭高速只了解公里数,具体位置不太清楚,请见谅。高速公路分上行线(公里数由小往大)、下行线(公里数由大往小),超速10%内不处罚,超速50%以上,可以吊销驾驶证,请同学们安全驾驶。 注:以上标注的“限速”均为小车速度
黄山段的高速公路因为车流不是很大,路面状况也不错,所以很容易超速,徽杭高速和合铜黄高速上的测速点信息,希望能对大家有所帮助: 1、徽杭高速:5公里处(下行)、27公里处(上行)、19公里处(上下行)、48公里处(上下行)、64公里处(上下行)、75公里处(上下行) 2、合铜黄高速:京台高速1327KM(上下行) 其他普通公路的测速点有: 1、歙县设置点:蔡坞测速点:S324线47KM+800M 2、徽州区设置点:徽州文化园测速点:G205线1615KM+420M,永佳科技园测速点S215线218KM+900M,永新公司测速点S215线219KM+500M 3、休宁县设置点:万安测速点S215线219KM+500M
高清区间测速系统设计方案
高清区间测速系统设计方案 高清区间测速系统自动记录车辆在不同地点的信息(车牌、车速、时间等),并把该车辆在区间内行驶的平均速度和设定的限速值作比较,判定该车是否超速。该系统可以拓展单点以及多区间测速。区间测速反映的是汽车行驶在一个路段的两个或多个区间截面之间的 平均速度,能更客观准确地检测超速车辆,为执法部门提供更加有效、可靠的违章执法依据。 一、系统特点: ?采用工业级高清摄像机进行抓拍,结合先创专利“高清成像系统综合控制技术”,图片清晰,取证有效; ?前端采用嵌入式设备,模块化设计,稳定可靠; ?车辆检测可兼容地感线圈、雷达、视频等多种方式; ?可扩展单点测速及多区间测速; ?可扩展完整卡口功能; ?远程集中管理,可通过网络实现远程设备配置、状态监控、故障报警。 二、工作原理: 区间测速是治安卡口的联合应用,其原理如图所示:
三、软件界面: 四、主要性能指标:
?车辆图像捕获率:≥99% ?号牌识别准确率:白天≥95%,夜间≥90% ?测速范围:1~255km/h,测速精度满足GB/T 21255-2007《机动车测速仪》要求 ?图片格式:JPEG图像文件,符合ISO/IEC 15444:2000的要求,放篡改 ?图片数量:单点每辆车1张或2张,每张图像均能满足车辆全景图像、特征图像要求;区间超速2张出入区间抓拍图片 ?图片大小:<200KB/张 ?图像分辨率:1,360×1,024(约140万像素)、1,600×1,200(约200万像素) ?数据格式:车辆经过时间、地点、方向、车型、单点车速、区间速度、车牌号等 ?工作温度:-20~+70℃ ?工作湿度:≤95% ?防护等级:符合IP65标准 ?可靠性:MTBF≥50,000小时 五、抓拍样张:
雷达测速原理简介及系统应用
测速雷达原理 雷达原理简介 首先,大家必须先了解雷达的基本原理,因为雷达仍是当前用来检测移动物体最普遍的方法。雷达英文为RADAR ,是Radio Detection And Ranging 的缩写。所有利用雷达波来检测移动物体速度的原理,其理论基础皆源自于「多普勒效应」,其应该也是一般常见的多普勒雷达(Doppler Radar),此原理是在19世纪一位澳地利物理学家所发现的物理现象,后来世人为了纪念他的贡献,就以他的名字来为该原理命名。 多普勒的理论基础为时间。波是由频率及振幅所构成,而无线电波是随着波而前进的。当无线电波在行进的过程中,碰到物体时,该无线电波会被反弹,而且其反弹回来的波,其频率及振幅都会随着所碰到的物体的移动状态而改变。若无线电波所碰到的物体是固定不动的,那么所反弹回来的无线电波其频率是不会改变的。然而,若物体是朝着无线电线发射的方向前进时,此时所反弹回来的无线电波会被压缩,因此该电波的率频会随之增加;反之,若物体是朝着远离无线电波方向行进时,则反弹回来的无线电波,其频率则会随之减小。下图为多普勒雷达(Doppler Radar)的基本原理图标: CS R-28测速雷达所应用的原理,就是可以检测到发射出去的无线电波,与遇到运动物体反弹回来的无线电波其间的频率变化及I 通道和Q 通道的相位变化。由频率的变化,依特定的比例关系,而计算出该波所碰撞到物体的速度。由I 通道和Q 通道之间的相位关系,计算判断运动物体是朝着无线电波的方向前进或朝其反方向前进。 根据多普勒原理,由于雷达发射和接受共用一个天线,且运动目标的运动方向与天线法线方向相一致,运动目标的多普勒频率fd 符合下列关系式。 (1) f d = 2V r f t C
机动车区间测速技术规范
机动车区间测速技术规范 1 范围本标准规定了机动车区间测速的技术要求。本标准适用于机动车区间测速系统的建设和应用。 2 规范性引用文件下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件 仅注日期的版本适用于本文件。凡是不注日期的引用文件 其最新版本 包括所有的修改单 适用于本文件。 GB/T 21255-2007 机动车测速仪 GA/T 16 道路交通管理信息代码 GA/T 497-2009 公路车辆智能监测记录系统通用技术条件 GA/T 832-2009 道路交通安全违法行为图像取证技术规范 GA/T 833 机动车号牌图像自动识别技术规 3 术语与定义GA/T497、GA/T832界定的以及下列术语和定义适用于本文件。 3.1 区间测速point-to-point speed measurement 检测机动车通过测速区间的平均速度的方法。 3.2 测速区间road section for speed detection 两个相邻测速监控点之间的路段。 3.3 区间行驶时间travel time between two points 机动车通过测速区间的时间。注 单位为秒。 3.4 平均速度average speed 测速区间距离与区间行驶时间的比值。注 单位为千米每小 时。 3.5 违法时间traffic offence time 违反限速规定的机动车驶入、驶出测速区间的时间段。 3.6 违法地点traffic offence location 违反限速规定的机动车通过的测速区间。3.7 车辆图像捕获率capture ratio of vehicle image 所记录的有效车辆数与实际通过车辆数的百分比。[GA/T497-2009,定义3.7] 3.8 全景特征panorama feature 包括机动车全貌、号牌、颜色、车型及显著地理特征。[GA/T832-2009,定义3.4] 4 一般要求 4.1 测速区间测速区间应设置在恒定限速值的路段。 4.2 告知标志实施区间测速的路段应在起点前方200m~1000m处设置预告标志 并在起点和终点分别设置起点标志和终点标志 样式参见附录A。 5 机动车区间测速系统功能要求 5.1 组成机动车区间测速系统由区间测速起点和终点监控设备、通信网络、中心控制设备及软件等组成。 5.2 信息采集具有实时采集机动车驶入、驶出测速区间时的车辆信息及全景特征图片的功能。区间测速起点和终点监控设备的车辆图像捕获率大于等于95%。采集信息项见附录B 表B.1~表B.3 符合GA/T16的要求。 5.3 号牌识别具有机动车号牌图像自动识别功能。号牌识别准确率应符合GA/T833的要求。 5.4 时钟同步具有与北京时间同步的功能。 5.5 平均速度计算具有计算机动车区间行驶平均速度的功能。
多普勒雷达测速
多普勒雷达测速 集团文件发布号:(9816-UATWW-MWUB-WUNN-INNUL-DQQTY-
多普勒雷达多普勒雷达测速是一种直接测量速度和距离的方法。在列车上安装多普勒雷达,始终向轨面发射电磁波,由于列车和轨面之间有相对运动,根据多普勒频移效应原理,在发射波和反射波之间产生频移,通过测量频移就可以计算出列车的运行速度,进一步计算出列车运行的距离。克服了车轮磨损、空转或滑行等造成的误差,可以连续测速、测向和定位。 多普勒效应 当发射源(或接收者)相对介质运动时,接收者接收到的电磁波的频率和发射源的频率不同,这种现象被称为多普勒效应。 物体辐射的波长因为光源和观测者的相对运动而产生变化。在运动的波源前面,波被压缩,波长变得较短,频率变得较高(蓝移)。 在运动的波源后面,产生相反的效应。波长变得较长,频率变得较低(红移)。 波源的速度越高,所产生的效应越大。根据光波红/蓝移的程度,可以计算出波源循着观测方向运动的速度。 多普勒效应 ,介质中波速为c则 假设原有波源的波长为λ,频率为f (1)当波源静止不动Vs=0,观察者以V0相对波源移动(向波源方向) (2)当观察者静止不动V0=0,波源以Vs相对观察者移动(向观察者方向) (3)当波源移动速度为Vs,观察者移动速度为V0,相对运动,此时介质中的波长和观察者接收到的波的个数都有变化 多普勒雷达的测速原理 多普勒雷达法利用多普勒效应测量列车运行速度。在车头位置安装多普勒雷达,雷达向地面发送一定频率的信号,并检测反射回来的信号。由于列车的运动会产生多普勒效应,所
以检测到的信号其频率与发送的信号频率是不完全相同的。如果列车在前进状态,反射的信号频率高于发射信号频率;反之,则低于发射信号频率。而且,列车运行速度越快,两个信号之间的频率差越大。通过测量两个信号之间的频率差就可以获取列车的运行方向和即时运行速度,对列车的速度进行积分就可得到列车的运行距离。 多普勒雷达的测速原理 雷达发射电磁波的频率为F,在介质中的传播速度为c,发射角为a1,当雷达以速度V平行于反射面运动(反射面静止),则在反射面接收到的波频率为f1 而此时反射面把波反射回去,相当于波源(静止),雷达接收反射回来的波,相当于观察者(平行反射面速度为V),由于雷达的运动,入射角为a2,则雷达接收到的波频率为f2 多普勒雷达的测速原理 发射波与接收波的频移为 由于雷达运动的速度V远远小于电磁波的速度c,可以近似认为入射角a2=a1,则频移将上式展为泰勒级数,并舍去高次项,可得 也就是说,发射波与入射波之间的频移fr与雷达的速度V沿发射波方向的分量的大小成正比。如果发射角a1固定,则频移fr就是与雷达速度V成正比,只要测量出频移fr的值,就可以计算出雷达的运动速度V 误差来源 ?为了简化计算,减少处理难度,一般都会取简化后的公式来计算,然而,由于简化公式是通过舍入的方法进行简化得,简化公式与原公式之间存在一定误差,这样在使用简化公式之前就要先考虑这个误差对计算的影响。 ?列车运行的过程中,由于轨面不平整或其他原因,列车会产生振动,但列车的振动基本上都是车体的高频上下小幅度运动
高速车速预警系统方案-CMOS-endversion
重庆绕城高速公路车速预警系统 关键词:高速公路车速预警 高速公路车速预警系统是根据重庆市高速公路的特征与高速公路管理服务的要求,组织科技人员进行科技攻关,大胆采用新技术新工艺,于2008年12月26日重庆外环高速公路西段正式通车前成功实施完成的项目。项目的成功实施,不但为广大行车人员提供了更多、更新、更人性化的安全预警措施,也为提高道路的畅通能力提供了良好的手段,创造了较好的社会效益,得到了重庆市广大市民的好评。 一、项目背景 重庆外环高速公路全长187公里,共分为东段、北段、南段、西段四个项目。外环高速公路是交通运输部确定的重庆地区首条"典型示范路"和全国4条"科技示范路"之一。由于重庆是典型的山区地带,具有多隧桥、多雨雾的特点,而且高速公路一般车速较快,这些对行车安全存在着严重影响。为了体现“科技示范路”的需求,业主精心求证,大胆创新,采用了更新的高科技技术,建设了高速公路条件下的车速预警信息提示系统,对于车速过快的车进行预警,保障广大驾驶员的生命财产安全,对于车速过慢,长期占用车道,影响道路行驶速度的车辆也进行预警,提醒行驶车辆进行相应处理,从而提高高速公路的道路通过效率和控制好行车速度。 在业主指导下,设计研发集成单位密切配合,克服了众多技术工程难题,创新使用了高速车牌识别技术与视频测速技术,准时完成了系统的建设,为这条崭新科技高速公路的开通提供了高质量的服务,得到了广大行车司机与新闻好评。 高速公路车速预警系统的主要功能是:设置双龙门架,两个龙门架相距300-500米,在第一个龙门架上安装高速车牌照识别视频测速设备,自动完成对经过该断面的所有车辆的车牌识别和车速计算;第二个龙门架上安装有LED显示屏,对经过第一个龙门架的车,一旦车速超出速度设定上下范围时,及时在前方的LED屏上显示相应的车牌号与速度信息,并提醒该车超速或者行驶过慢,司机就能及时清晰看到提示信息,从而减速行驶或者加速行驶,实例示意图如下:
雷达测速(窄波雷达)
精心整理测速抓拍系统 设 计 方 案 沈阳腾翔科技有限公司
一、概述 1.1前言 近年来,随着城市机动车数量的不断增长,在带来诸多便利的同时,也存在着一些问题。车辆违法行为层出不穷,交通事故频频发生,都给城市交通管理造成了一定的难度。在“向科技要警力、向科技要效率”的今天,充分利用高科技手段,开发和研制出可以纠正遏制交通违法行为,有效实现交通管理,提高交通运输效率的产品显的十分必要。目前国内外虽有类似产品先后被研发出并面世,但都或多或少存在着不足之处。产品大多采取标清摄像机加视频采集卡的方式实现对违法车辆的记录,虽然价格低廉,但稳定性欠缺,故障率较高,增加了维护成本和工作量。国外产品较为稳定,但功能相对比较单一,价格十分昂贵,不适宜全面推广,大多只应用在一些要求非常严格的高端智能测速抓拍领域。 针对上述情况,公司推出了新一代窄波高清一体化测速抓拍取证系统。它相对第一代测速仪有了很大的改进,像素200万、500万可选,采取触摸屏操作,操作简便明了。同时二代测速系统设计更加简单轻便,更加灵活,并且增加了一些智能调节功能。该系统紧密结合公安业务需求,综合吸收了国内外产品的优点,采用全嵌入式结构,系统稳定可靠、功能强大、安装方便,适宜全面推广。系统的设计还充分利用了公司在安防监控行业的技术优势,实现了安防监控与智能交通的完美结合,随着该系统的推出,将真正的解放警力,提高交警的工作效率,实现“科技强警”。 1.2设计依据 1.《中华人民共和国道路交通安全法》 2.《中华人民共和国道路交通安全法实施条例》 3.《公路交通安全实施设计技术规范》(JTJ074-2003) 4.《公路车辆智能监测记录系统通用技术条件》(GA/T497-2009) 5.《公安交通指挥系统工程建设通用程序和要求》(GA/T651-2006) 6.《公安交通管理外场设备基础施工通用要求》(GA/T652-2006) 7.《公安交通指挥系统工程设计制图规范》(GA/T515-2004) 8.《安全防范工程技术规范》(GB50348—2004)
(技术规范标准)广东省高速公路区间测速系统技术规范
广东省高速公路区间测速系统技术规范 广东省公安厅交通管理局 二00七年七月十九日
目录 1适用范围 (1) 2基本结构 (1) 3工作原理要求 (2) 4功能要求 (2) 5硬件要求 (2) 6通信传输要求 (4) 7性能指标要求 (4) 8测试要求 (5) 9与违章信息系统的接口要求 (5) 违法图片信息信息要求 (5) 交通违法数据接口说明 (5) 10建设要求 (10) Page - 2 - of 12
1 适用范围 本规范适用于全省高速公路所建设的区间测速系统。 2 基本结构 目前,我省各市环境、经济、交通条件都不尽相同,因此系统的布点、通信、管理情况也需要因地制宜做出不同方案。根据各地的实际状况,充分利用现有系统和现有资源,可对各地的固定点测速系统进行升级改造或重建。通信系统可采用光纤、电信网络、各地专网或无线网络等。 各监控中心应能上传支队、总队数据中心,需要交换的数据包括:摄象机采集来的实时视频;经前端识别器的车牌识别数据;查询数据;该级监控中心可利用的通信系统包括光纤(裸纤)、100/1000M公安网络、无线网络等。 一套区间测速设备主要由前端单元、通信传输和后台处理系统三部分组成,如图1所示。 图1 区间测速系统结构图 支队的所有区间测速系统应实现联网运行,并为将来数据上传总队指挥中 Page 1 of 12
心预留接口。 3 工作原理要求 在相距10~15km的封闭路段的两端点上,分别安装一套前端检测抓拍设备,当机动车通过检测点时,安装在该点的检测抓拍设备自动记录其通过该点的时间、并进行图片抓拍。当车辆完全离开封闭路段时,系统通过网络将数据传到监控中心,监控中心根据捕获的信息自动计算其在封闭路段上的平均行驶速度。如果平均速度超限,系统将采用特定的加密技术在违章机动车的图片中嵌入相应的时间、地点和速度,并及时将该车辆的违章信息通过数据交换发送到支队违法系统,作为交警执法的依据。 4 功能要求 1.系统检测数据至少包括车速、车牌、地点、时间等; 2.检测系统应包括自动号牌识别; 3.系统具有日志记录功能、断电保护、重启功能; 4.各监控点可以由监控中心远程控制、远程维护; 5.各监控点的设备应具有必要的防盗、防雷、防雨、散热措施; 6.系统设备应具有自动对时功能; 7.系统能够实现把超速信息通过网络传输至省、市级监控中心; 8.系统应能够对违章车辆进行统计、分析、管理,生成各种报表; 9.系统应能够对信息加密及实现权限管理; 扩展功能要求: 1.检测机动车流量功能 2.无车牌、车牌故意遮挡和车牌涂污识别功能; 3.单点测速功能; 4.黑名单、布控车辆比对、报警功能; 5.非法占用路肩抓拍功能。 5 硬件要求 前端检测抓拍单元应由摄像设备、夜间补光设备、车辆检测设备、信号发送设备、通讯设备等组成,负责采集车辆的行驶时间,行驶速度,车辆车牌号,车辆图片等信息,是 Page 2 of 12
测速雷达工作原理
测速雷达工作原理 车友多有闯红灯或超速被电子眼拍到而被罚的经历。只要给电子眼拍到,罚款不是200就是500,心痛之余,车友去寻找反电子眼的设备。本文就目前的几类常用设备作一个粗浅的原理分析和功能比较。闯红灯或超速驾驶极易造成交通事故,请车友三思。 一、雷达探测器 雷达测速的原理是,道路旁装有雷达发射器,向道路来车方向发射雷达波束,再接收汽车的反射的回波,通过回波分析测定汽车车速,如车速超过设定值,则指令相机拍摄,如晚间同时触发闪光灯。雷达探测器的原理很简单,就是接收到雷达信号后,马上报警,提示车主减速。 雷达探测器基本是进口的,价格一般在800元至5000元,性能高低也非常不同。最大的不同,就是可以感应的雷达波的频段不同。因为我国各城市道路的雷达测速设备从不同的国家进口,使用的雷达频率大多并不相同,同一个城市有些装了来之三四个国家的不同频段的雷达测速器。低端的雷达探测器,往往只能感应一个频段的雷达波,而高端的雷达探测器,可以感应多个频段的雷达波,甚至还有激光感知器,同时还可以防激光测速器。 此外,感应的距离远近也体现了雷达探测器的性能高低。如感应距离过近,车主来不及减速,已经被拍到了;如减速过猛,还易造成追尾事故。高端的雷达探测器可以一公里左右感知雷达波,而差的只有在200米左右才能感应。 雷达探测器的软肋: 1)一些便宜的设备因频段和灵敏度的问题,反雷达测速的效果不好;效果好的又比较贵。2)目前,很多城市采用路面下埋设速度感应线圈的方法来检测超速,此时雷达探测器可能只部分有效。 3)此类设备只能应付雷达测速,而路口红灯电子眼完全无效。 二、电子狗 电子狗价格在250至500元之间,使用时只要插入点烟器即可,非常方便。它侦察电子眼原理非常简单:生产电子狗的厂家,在有电子眼的地方,偷藏了一个无线电发射器,它针对所在路线的特点,发了含有信息代码的无线电信号,汽车开近此地,接收器收到发射器的无线电信号,解码出报警类型,发声芯片发出语音报警,如此段限速,此段单向,此路口有电子眼等。 电子狗的优点是成本低。缺点是:第一,如果所有的红绿灯都装了电子眼(比喻深圳),因此,电子狗会响个不停,不但失去报警意义,还非常吵人,一般产品音量无法调节,也无法关闭;第二,没有无委会的批准,这样发射器的设置是非法的,还要供电,需偷偷换装,有可能被拆掉或损毁。第三,发射器的发射功率要定得恰当,如过小则接收到信号的时候,为时已晚;过大则很远就开始叫,烦人。第四,电子狗不能判别方向,如对面车道或交叉车道有电子眼,也会误报。 优点:便宜 软肋:非法,吵人,不可靠,范围有限。 三、GPS雷达探测器 GPS雷达探测器不但能做测速雷达警报,也可以做红绿灯电子眼警告;不管电子眼的监测方法是用雷达波、激光,还是用地面感应线圈,GPS雷达探测器都可报警。 交管系统每增加一处电子眼,电子狗系统就要去偷装一个发射器;相比之下,GPS雷达探
高速公路固定测速施工方案
目录 1.整体技术方案 1.1.项目概述 1.1.1. 项目名称 1.1. 2. 项目业主 1.1.3. 资金来源 1.1.4. 项目范围 1.1.5. 计划工期 1.1.6. 质量标准 1.1.7. 质保期限 1.2.施工技术方案 1.2.1. 施工准备 1.2.1.1. 技术准备 1.2.1.2. 物资准备 1.2.1.3. 劳动力准备 1.2.2. 施工测量放样及测速点位复勘 1.2.2.1. 施测原则 1.2.2.2. 施测流程 1.2.2.3. 控制网设置及技术要求 1.2.2.4. 测量方法及工作程序 1.2.2.5. 工程测量控制要点
1.2.2.6. 固定测速点位复勘 1.2.3. 固定测速装置基坑开挖机浇筑 1.2.3.1. 施工准备 1.2.3.2. 基础施工 1.2.4. 管沟开挖及管路敷设 1.2.4.1. 施工准备 1.2.4.2. 管沟施工 1.2.4.3. 管道敷设 1.2.4.4. 管道安装 1.2.4.5. 接口施工 1.2.4.6. 管道与井室连接施工 1.2.5. 管沟回填及线缆敷设 1.2.5.1. 管沟回填 1.2.5.2. 线缆敷设 1.2.6. 光缆敷设工艺及流程 1.2.7. 线缆绝缘测试 1.2.8. 固定测速装置、控制箱及接地安装 1.2.8.1. 施工准备 1.2.8.2. 施工工艺 1.2.9. 通电调试 1.3.人员配备方案 1.3.1. 人员配备结构
1.3. 2. 岗位职责 1.3. 2.1. 项目经理岗位职责 1.3. 2.2. 技术负责人岗位职责 1.3. 2. 3. 施工员岗位职责 1.3. 2.4. 质检员岗位职责 1.3. 2.5. 材料员岗位职责 1.3. 2.6. 安全员岗位职责 1.3. 2.7. 预算员岗位职责 1.3. 2.8. 械管理员岗位职责 1.3. 2.9. 实验员岗位职责 1.3.3. 施工组织管理机构图 1.3.4. 人力资源计划 1.3.5. 劳动力配备计划 1.3.6. 机械设备计划 1.3.7. 材料准备 1.3.8. 做好与设计的结合工作 1.4.项目质量保证体系方案 1.4.1. 工程质量目标 1.4. 2. 公司质量保证措施 1.4. 2.1. 公司的质量体系构成 1.4. 2.2. 公司质量体系运行情况 1.4. 2. 3. 公司工程质量保证体系
重庆市各条高速公路限速标准及测速点
高速公路名称限速路段限速标准限速路段的测速地点、方 式 成渝高速公路 邮亭至荣昌100KM 出城80KM流动 青杠至丁家 100KM 出城26KM流动 大安至丁家100KM 进程42KM流动 荣昌至渝荣100KM 出城100KM固定 大安至丁家100KM 进程39KM固定 渝荣至荣昌100KM 治超预检报警设备测速点走马至白市驿100KM 进程15KM流动 渝邻高速公路 草坪至高嘴路段100KM 38.5KM流动 高嘴至大湾路段100KM 48.5KM流动 高嘴至大湾路段100KM 44KM流动 邱家河至大湾路段100KM 预检报警设备测速点 渝武高速公路合川至兴山路段110KM 出城78KM流动合川至兴山路段110KM 进城88KM流动合川至兴山路段110KM 预检报警设备测速点北碚至北环路段100KM 进城22KM固定北碚至北环路段100KM 出城18KM流动合川至北碚路段110KM 进城49KM流动 渝宜高速公路箭沱湾至复盛路段80KM 预检报警设备测速点
洛碛至箭沱湾路段80KM 35KM 洛碛至箭沱湾路段80KM 进城38KM 洛碛至箭沱湾路段80KM 出城40.5KM 洛碛至箭沱湾路段80KM 43KM 洛碛至长寿路段80KM 进城60KM、进城52KM 长寿至云台路段110KM 出城80KM、出城96KM 云台至长寿路段110KM 进城95KM、进城73KM 长寿至洛碛路段80KM 进城60KM、进城52KM 澄溪至云台路段110KM 101KM、107KM 垫江至澄溪路段110KM 101KM、107KM 周嘉至垫江路段110KM 101KM、107KM 渝宜(沪蓉、万云) 高速云龙至梁平段110KM 174KM流动 孙家至梁平段100KM 191KM流动 万州至分水段100KM 预检报警设备测速点 万开高速公路万州到开县80KM 固定测速点 渝黔高速公路南环至一品路段100KM 0km—13km+500m 流 动 一品至綦江路段100KM 14KM+500M至 41KM+500M流动 綦万高速公路綦江至万盛路段80KM 0KM至32KM+50M 流动长涪高速公路长寿至涪陵路段80KM 出城3KM18.5KM、流动