多种格式多波束数据统一转换
多种格式多波束数据统一转换
1概述
多波束测深系统是一种具有高精度、高效率和高分辨率等优点的海底地形测量新技术[1] 。目前使用的多波束测深系统大都采用国外较为成熟的产品,由于多波束测深系统的种类繁多,如ELAC公司的Seabeam系列、SIMRAD公司的EM系列等均有广泛应用,其输出的数据格式也不同,而且与之对应的数据采集及数据处理的第三方处理软件多种多样。为了便于多波束的数据处理,统一数据格式是一项很重要的工作。
2多波束数据格式
多波束数据的格式种类繁多,如UNB、GSF、ALL、XTF、RDF 等。下面对这几种常用的多波束数据格式作简要介绍。
2.1 UNB 数据格式
UNB( University of New Brunswick )数据格式是加拿大
New Brunswick 大学设计的一种多波束数据外部交换格式,该格式可以提供较为完整的原始采集数据信息用于多波束的数据处理。UNB数据格式文件的设计基本包含了所有关于海底测深的所有相关信息,如时间、经纬度、声速剖面、船的参数等[5] 。
2.2 GSF 数据格式
GSF(Generic Sensor Format )数据格式是按照通用数据格式制定的一种数据交换格式,这种格式标准着重于多波束数据,同时也包含单波
束数据。该格式可以存储不同格式的多波束数据,以及在此基础上进行扩展等。
2.3 ALL 数据格式
ALL数据格式是SIMRAD公司的EM系列的多波束测深系统采用的数据存储格式,由于EM系列多波束测深系统占有的市场份额较大,ALL数据格式的应用也很广泛。ALL格式数据可以根据需要改变数据包的大小,数据文件中记录的信息也很全面,如导航信息、测深、海底振幅数据记录、船姿记录等[2,4] 。
2.4XTF 数据格式
XTF ( eXtended Triton Format)数据格式也是一种常用的多波
束数据格式,该格式数据包含许多不同类型的声纳、导航、遥测和水深信息,并且在将来需要添加新的数据类型时,很容易对该数据格式进行扩展。
2.5RDF 数据格式
RDF( Raw Data File )数据格式是GeoSwath系统采集的原始数据格式,以二进制方式编码。RDF文件由一个288字节的文
件头和一些Ping 字段组成。文件头中包含数据采集的基本信息,Ping 数据字段存储各传感器采集的数据和原始字符串等信息。
3MBF数据格式
为了统一多波束数据格式,便于后续数据处理工作,文章定义了一种新的多波束数据格式―― MBF( Multibeam Data Standard Format )格式。
3.1 MBF 数据集结构
一个完整的MBF数据集包含如下文件:传送头文件,在一个给定的事务中描述哪些数据在被传输和如何能处理它们;元数据文件,描述内容和给定采集数据的原始状态;数据文件,包含数据本身的文件。
3.2 MBF数据文件
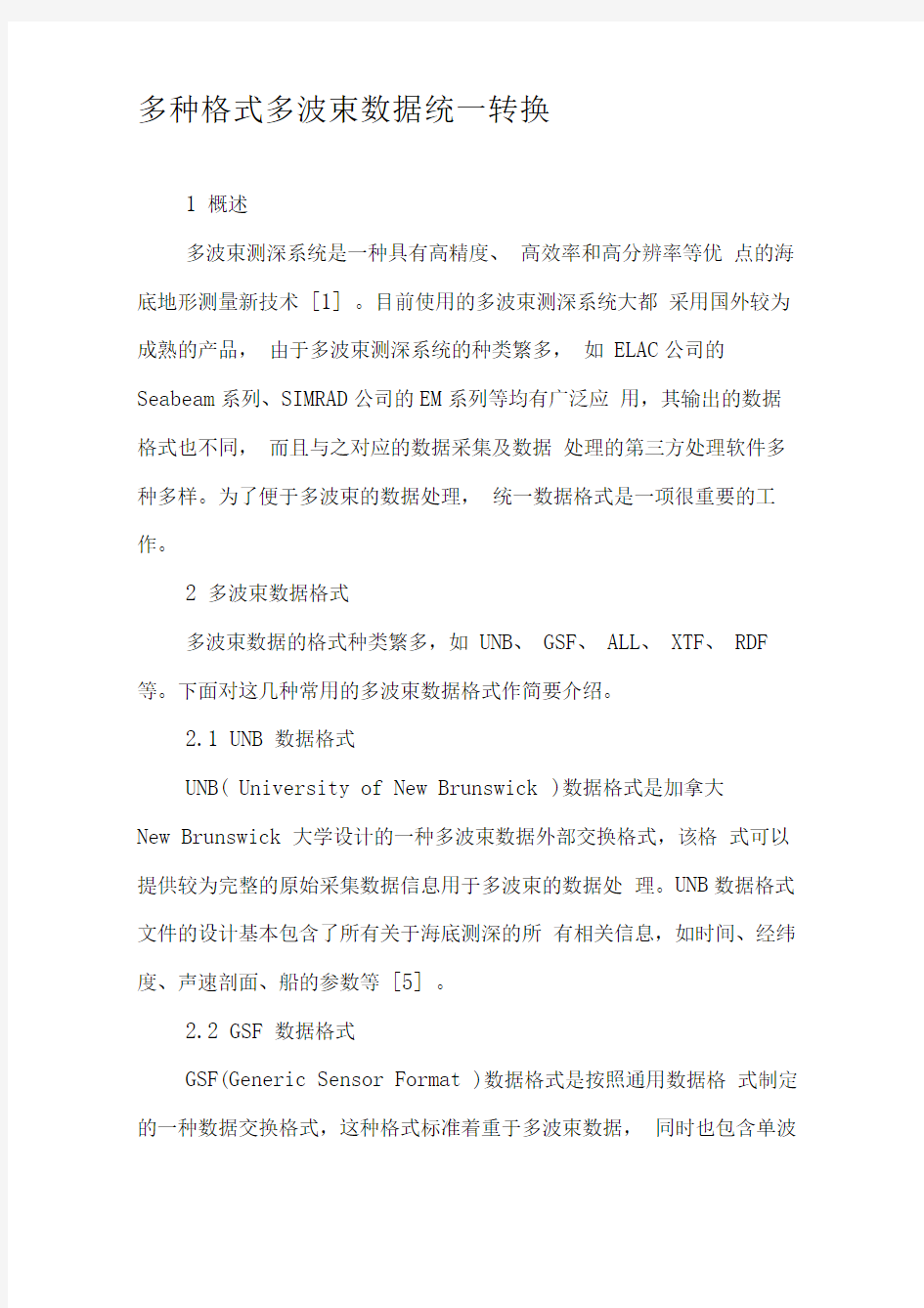
3.2.1M BF 记录结构每条记录的第一个字包含定义记录的数据部分
大小的一个
32 位无符号的整数。第二个字是记录标识符字段,由一个校验和标志、一个保留的字段和一个记录识别字段组成。MBF记录结构如图1 所示。
3.2.2M BF 记录类型
该格式支持单波束和多波束测深数据,记录类型包括:
(1)数据头记录( header record )
数据头记录包含记录有MBF数据文件格式版本号的单个文本字段。
(2)测深ping 记录( bathymetry ping record ) ping 记录
包括强制性ping 头和一个或多个可选子记录。
(3)包含单波束数据的单波束测深记录( single-beam sounding record )
单波束测深记录的基础是测深ping 记录。
5)声速剖面记录(sound velocity profile record 声速剖面记录包含用于估算个别测深定位的声速值。
(6)导航误差记录(navigation error record )
导航误差记录包含对水平位置误差的评估。
(7)姿态记录(attitude record )姿态记录包含一个由船舶姿态传感器报告的测量数组。
(8)处理参数记录(processing parameter record )
处理参数记录包含重要的标量或描述整体调查条件的向量值或可操作的值。
(9)传感器参数记录(sensor parameter record )典型的传感器参数包括传感器的模式、传感器偏移定位和船的吃水补偿值。
(10)注释记录(comment record )注释记录用来维护那些其他记录不能容纳的信息。
(11)历史记录(history record )历史记录旨在应用于数
据,支持自动文档的处理。
4多波束数据格式转换软件
文章基于MFC开发多波束数据格式转换软件,主界面如图 2 所示。本软件支持多种格式的多波束测深数据转换,分别对不同的多波束数据格式进行解析,提取相应信息另存为MBF数据格式。软件运行状态信息显示在错误信息栏。
文章通过对几组实测数据进行测试,结果如下:
(1)GSF数据格式(如图3)
(2)UNB数据格式(如图4)
(3)RDF数据格式(如图5)
( 4) ALL 数据格式(如图6)
通过以上结果可以看出,各格式的多波束数据均能准确解
析,显示出各数据文件中的相关,同时转换为MBF格式。
5 结束语
由于多波束的仪器众多,而不同仪器对应的多波束数据文件格式也不同,在后续数据处理时必须由相对应的配套软件进行数据解析,无形中增加了数据处理的工作量。文章旨在通过定义一种数据格式将多源数据进行融合,同时开发数据格式转换工具,将多格式的多波束数据转换为统一的数据格式,以便于进行后续多波束数据处理工作。
多波束回声测深仪
多波束回声探测仪的由来 以下文字出自《海洋知识一万个为什么》 由于回声测深仪辐射的声波比较宽,所以用它测量海水深度时经常将海底“抹平”,不能真实地反映海底的情况。而增加发射声波的指向性,虽然能提高测量的分辨率,更真实地反应海底的起伏情况,但是测量的速度又大大地降低了。那么,到底有没有更好的办法既能提高测量的精度,又不降低测量的速度呢?为此,科学家们想了很多办法,多波束测深仪就是其中比较成功的一种。 多波束回声测深仪定义 (multi beam echo sounder)是利用多波束回声信号测量、绘制海底地形和水深的装置。整个系统由声波收发射器、信号处理装置和工作站三个基本部分组成。收发射器或探头安装在船底龙骨上,以“扇面”形式向水底发射数十、数百束声波,通过接收传感器接收自海底反射回来的回声波,并由电缆将回声信号传输到船上的信号处理机进行处理,再通过显示器或绘图仪将处理过的海底信号绘制成水深图或地形图。经工作站处理的信号还可绘制成彩色地形图和底质图。根据此测深仪的用途可分为深水型和浅水型两种:深水型测深范围可达12 000米,精度为水深的05%;浅水型测深范围0~500至1000米不等,精度可达水深的0.3%,为提高测深精度,这种设备一般都配有船姿补偿仪和声速校正系统,已广泛用于大陆。 与普通探测仪的区别 普通测深仪之所以会将海底“抹平”,关键就在于它不能区分不同地点的回波信号。多皮束测深仪与普通的测深仪不同,它的发射换能器是特别设计的。普通测深仪发射的声波是圆锥形的,类似于从手电筒射出的光线,而多波束测深仪发射的声波是扇面的,有点类似于透过门缝的手电光线。多波束测深仪的发射换能器是朝着与航线垂直的方向向下的扇面发射声脉冲的,所以,在海底只有与航线垂直的一条线上有声波到达,因此也只有在这一条线上的海底才会反射声波。此外,它的接收换能器也是特别设计的,这种接收换能器只能接收某些特别方向的声信号,类似于透过一个多孔的纸板看东西。这样一来,不同地点的回波信号就像是通过不同的“孔”进入接收换能器一样,多波束测深仪也因此而得名。再用计算机来处理这些数据,就能得到与航线垂直的一条线上几十个点的深度了。随着测量船的行驶,可以迅速测出与航迹平行的几千米宽的一条带状海域内各点的深度。再配上必要的软件和绘图设备,就能绘制出所测海域的海底地
多波束形成技术研究
多波束形成技术研究 陈晓萍 (中国西南电子技术研究所,四川成都610036) 摘要:讨论了跟踪与数据中继卫星系统(TDRSS)中关于多波束形成的算法,优选的有LMS自适应方式和相位调整自适应方式;并简单介绍了波束控制和波束形成的实现。 关键词:TDRSS;多波束形成;LMS自适应算法;相位调整自适应算法 一、前言 随着航天技术的发展,要求测控通信站能高覆盖地对飞船等多个目标进行测控通信。要解决这个问题靠现有地面测控网和业务接收站已不能满足要求,需要建立天基测控通信系统,即跟踪与数据中继卫星系统(TDRSS)。 TDRSS把测控通信站搬移到天上同步定点轨道的中继星上,从上向下观测中低轨卫星、飞船、航天飞机等空间飞行器,从而提高了覆盖率。为了减轻中继星的复杂性和负担,将中继卫星观测到的数据和信息传到地面,由地面中心站进行处理。TDRSS中继星相控阵天线同时与多个用户航天器保持跟踪,地面站到航天器的正向通讯为时分多波束,反向通讯为码分和同时多波束。为了减轻中继星的负担,中继星上只装有形成正向天线波束扫描所需的电调移相器,由地面终端计算并发出指令,调节星上移相器相位,让天线波束以时分方式扫描对准各用户航天器,在对准期间完成正向数传。多个用户航天器送到中继星的反向数传信号在星上进行多波束形成会大大增加中继星的复杂性,反向信号经星上阵列天线接收和变换,各阵元收到的信号用频分多路方式相互隔离送往地面,由地面接收前端将频分多路还原成同频多路阵元输出,交由终端进行相控阵多波束形成处理。所谓波束形成, 就是利用开环控制或闭环自适应跟踪方法,对不同反向到达的信号用不同的权系数矢量对各阵元输出进行幅度和相位加权, 使各阵元收到的同一用户信号在合成器中得以同相相加, 输出信号最大, 干扰和噪声最小。当存在多个目标时, 地面终端利用码分多址方法和利用多个波束形成器并行地完成各目标的波束合成处理完成各用户的数传与测控。 二、多波束形成算法 数据中继卫星系统在多址方式下,服务对象一般分布在较低的地球轨道上,当用户星离地面的轨道高度在3 000 km以下时,中继星各阵元波束宽度只要26°就可覆盖地球周围的所有用户星。 当用户星以最大速度10 km/s运动,用户星穿过3.5°宽的合成波束所需的时间最短为205 s,所以中继星跟踪用户星所需的波束移动角速度是很小的。假定波束移动步进量为阵合成波束宽度3.5°的5%即0.175°,波束步进间隔时间长达10.5 s。只要计算机能在10.5 s 内依据用户星位置更新相控阵的相位加权系数,就会使合成波束移动并时刻对准目标。 按照目标的捕获与跟踪过程,多波束形成应有3种工作方式:主波束控制方式(开环)、扫描方式(开环)及自跟踪方式(闭环)。 当有先验信息如根据目标的轨道方程计算出目标在空中的当前位置时,可采用开环的主波束控制方式, 由用户星的实时俯仰角和方位角,计算机算出加权系数矢量,送到多波束处理器完成波束加权合成。用户星相对中继星来说角度移动缓慢,随着用户星的移动,计算机实时逐点计算出权系数矢量,可维持主波束的开环跟踪。主波束控制方式一般用于目标的初始捕获,完成后进入自动跟踪状态。 如果没有先验信息不知道目标的起始位置,可以采用波束扫描方式,根据事先制定的空
两种深水多波束测深技术的对比
刘方兰余平肖波罗伟东 (广州海洋地质调查局广州 510760) E-mail:lflhome@https://www.360docs.net/doc/9b12407411.html, 摘要:近年来,在深水进行多波束水深测量使用最多的是SeaBeam2112系统和EM120系统。本文作者根据这两套系统在相同海域的实测资料,进行了数据密度、地形剖面以及不同比例尺成果图的对比,两套不同系统在深水测量具有较好的一致性,但EM120系统测量数据相对密度较大,分布均匀,可以绘制更大比例尺地形图。 关键词:EM120 SeaBeam 多波束测深比较 中图分类号: P24 至2006年底,我国海域200m以深海域已经完成了大约80%面积的多波束全覆盖水深测量,主要使用的测深系统有SeaBeam2112、SeaBat 8150以及EM120系统。随着国土资源大调查项目的开展,深水海域多波束水深测量仍将继续进行。目前,多波束测深技术的已经普及,专业海洋调查船一般都会固定安装的多波束测深系统,而且多波束测深技术还在不断发展与更新,这样,用于水深测量的多波束系统的种类还会越来越多。不同种类的多波束系统的实际测量效果如何?它们的测量精度如何?它们的测量结果有何区别?这些都是我们关心的问题。本文利用2004年6月SeaBeam2112和Em120两套多波束系统在南海北部相同海域测量资料,对两系统测量数据密度、测量精度以及成果图等进行了比较。 1.深水多波束系统简介 测深范围在5000m以上的深水多波束测深系统主要有SeaBeam系列、EM系列、SeaBat 系列和DS系列四种,我国目前拥有其中前三个系列的深水系统:SeaBeam 2112系统、EM120多波束系统和SeaBat8150系统。SeaBeam2112多波束系统是美国SeaBeam公司声纳技术军转民的第二代产品,工作频率12kHz,测量水深10~11000m,波束大小为2.0°×2.0°,最大波束数151个。80年代以来,SeaBeam2112系列多波束系统大量应用于海洋地形地貌测量。EM120多波束系统是Kingsberg Simrad公司90年代中后期产品,工作频率与测深范围与SeaBeam2112系统一样,波束大小有1°×1°~2.0°×2.0°,最大条幅开角140°,最多可以接收191个波束。由于该系统良好的的技术性能,很快成为全球海洋测量使用较多的深水多波束系统,目前在世界上拥有最多的用户。新的SeaBat8150系统技术指标相对其他系统,其深水测量的分辨率具有明显的优势,但因国内用户少,没有实际应用的资料。 广州海洋地质调查局于1994年在国内率先引进SeaBeam2112多波束系统,安装于“海洋四号”船上。多年来,“海洋四号”船多波束测深的范围遍及南海、东海、太平洋,覆盖的面积超过了40万平方公里,取得了大量的实际资料,特别是在南海,由于使用了差分GPS 定位,多波束测量资料精度高,质量可靠。中国大洋协会属下“大洋一号”科学考察船早期于1995安装了同样的SeaBeam系统,但2003年把SeaBeam2112系统更新为现在的EM120系统,2004年已经正式投入使用。国内还有一些海洋调查和研究机构也装备有不同型号的深水或中深水多波束系统,但公开的资料少,特别是很少有可进行对比的测量资料。2004年6月,拥有EM120系统的德国太阳号来到南海进行调查,为SeaBeam2112、EM120这两套深水多波束系统的实测对比提供了条件。
多波束数据
Processing of High-Frequency Multibeam Echo Sounder Data for Seafloor Characterization Laurent Hellequin,Jean-Marc Boucher ,Member,IEEE ,and Xavier Lurton Abstract—Processing simultaneous bathymetry and backscatter data,multibeam echosounders (MBESs)show promising abilities for remote seafloor characterization.High-frequency MBESs pro-vide a good horizontal resolution,making it possible to distinguish fine details at the water–seafloor interface.However,in order to accurately measure the seafloor influence on the backscattered en-ergy,the recorded sonar data must first be processed and cleared of various artifacts generated by the sonar system itself.Such a preprocessing correction procedure along with the assessment of its validity limits is presented here and applied to a 95-kHz MBES (Simrad EM1000)data set.Beam pattern effects,uneven array sen-sitivities,and inaccurate normalization of the ensonified area are removed to make possible further quantitative analysis of the cor-rected backscatter images.Unlike low-frequency data where the average backscattered energy proves to be the only relevant fea-ture for discriminating the nature of the seafloor,high-frequency MBES backscatter images exhibit visible texture patterns.This ad-ditional information involves different statistical distributions of the backscattered amplitudes obtained from various seafloor types.Non-Rayleigh statistics such as -distributions are shown to fit correctly the skewed distributions of experimental high-frequency data.Apart from the effect of the seafloor micro-roughness,a sta-tistical model makes clear a correlation between the amplitude sta-tistical distributions and the signal incidence angle made available by MBES bathymetric abilities.Moreover,the model enhances the effect of the first derivative of the seafloor backscattering strength upon statistical distributions near the nadir and at high incidence angles.The whole correction and analysis process is finally applied to a Simrad EM 1000data set. Index Terms—Backscatter model,-distribution,multibeam echo sounder (MBES),seafloor classification. I.I NTRODUCTION M ANY marine activities (marine geology,commercial fishing,offshore oil prospecting and drilling,cable and pipeline laying and maintenance,and underwater warfare)need tools and methods to remotely characterize the seafloor.Modern swath-mapping sonars are well designed for this task;they have quickly evolved upwards over the last 40years and nowadays are beginning to meet most of the requirements needed to reliably characterize the seafloor.Among the ex-isting acoustical mapping systems,multibeam echo sounders (MBESs)are currently the main focus of attention because of their ability to provide both a bathymetric map and a backscatter image of the surveyed area. Manuscript received February 5,2001;revised June 11,2002. L.Hellequin and X.Lurton are with IFREMER,TMSI/AS,Technop?le Iroise,BP 70,29280Plouzané,France. J.-M.Boucher is with ENST Bretagne,BP 832,29285Brest Cedex,France.Digital Object Identifier 10.1109/JOE.2002.808205 Usually installed under a ship’s hull,an MBES transmits a sound pulse inside a wide across-track and narrow along-track angular sector;then a beamforming process simultaneously cre-ates numerous receiving beams steered at different across-track directions.This spatial filtering allows us to pick up echoes coming from adjacent seafloor portions independently.One sounding is accurately computed inside each beam by simulta-neously measuring the beam steering angle and the echo travel time,according to various estimation methods based on either amplitude or phase.A high density of sounding points is thus generated along the survey swath,and new “pings”are trans-mitted as the ship proceeds on her way.Taking into account the ship’s navigation and attitude,the data from successive pings are finally gridded together in order to create an accurately georeferenced digital terrain model (DTM). In addition to measuring the echo travel times and angles for bathymetry,an MBES also records the echo amplitudes con-taining information about the nature and geoacoustical proper-ties of the seafloor.The echo amplitude is typically remapped to a color or gray scale and forms a coregistered backscatter image.The short pulse length provides the high resolution needed for imaging seafloor backscatter with a sufficient amount of details.For low-resolution MBESs (working in deep water at lower frequencies,typically 12kHz [1]),it seems that the mean backscattering strength (BS),recorded as a function of the incident angle,is the only measured parameter usable to characterize the interface acoustical properties [2].However,for MBESs with better resolution (designed for shallow depths with higher frequencies,typically 100kHz [3]),more infor-mation is available from the backscattered signals for a better seafloor characterization. A typical example of a BS image with a good resolution (Fig.1)shows various textures and spatial organizations of pixels that are clearly related to variations in the nature of the seafloor.In addition to its average level,the BS variability within subareas makes it possible to improve seafloor character-ization using statistical techniques [4],[5].Better classification results are expected when the MBES characteristics (frequency,beamwidth,and incidence angle)and an appropriate BS model are used to refine the analyses. Analyzing a backscatter image in detail reveals several arti-facts that degrade the image and corrupt BS measurements.The strong specular echo,causing a high-level line under the ship’s track,is linked to the backscattering physics and is not to be considered,properly speaking,as an artifact;however,it is a pe-nalizing feature,quite difficult to erase from sonar images.The main artifact comes from the directivity patterns of arrays used for the signal transmission and reception,that are usually not 0364-9059/03$17.00?2003IEEE
多波束勘测系统工作基础学习知识原理及其结构
第二章多波束勘测系统工作原理及结构 多波束系统是70年代兴起、80年代中、末期又得到飞速发展的一项全新的海底地形精密勘测技术。它是当前兴趣的焦点,因为它既有条带测深数据,又同时可获取反映底质属性的回波强度数据(Laurent Hellequin et al.,2003)。该技术采取广角度定向发射和多通道信息接收,获得水下高密度具有上百个波束的条幅式海底地形数据,彻底改变了传统测深技术概念,使测深原理、勘测方法、外围设备和数据处理技术诸方面都发生了巨大变化,大大提高了海底地形勘测的精度、分辨率和工作效率,实现了测深技术史上的一次革命性突破(李家彪等,2000)。多波束系统的工作原理与传统的单波束回声测深仪工作原理类似,都是根据声波在水下往返传播的时间与声速的乘积得到距离,从而得到水深。不同的是单波束测深仪一般采用较宽的发射波束(8°左右)向船底垂直发射,声传播路径不会发生弯曲,来回的路径最短,能量衰减很小,通过对回声信号的幅度检测确定信号往返传播的时间,再根据声波在水介质中的平均传播速度计算测量水深。在多波束系统中,换能器配置有一个或者多个换能器单元的阵列,通过控制不同单元的相位,形成多个具有不同指向角的波束,通常只发射一个波束而在接收时形成多个波束。除换能器天底波束外,外缘波束随着入射角的增加,波束在倾斜穿过水层时会发生折射,同时由于多波束沿航迹方向采用较窄的波束角而在垂直航迹方向采用较宽的覆盖角,要获得整个测幅上精确的水深和位置,必须要精确地知道测量区域水柱的声速剖面和波束在发射和接收时船的姿态和船艏向。因此,多波束测深在系统组成和测量时比单波束测深仪要复杂得多(周兴华等,1999)。 §2.1 多波束勘测系统的工作原理 2.1.1 单波束的形成 2.1.1.1 发射阵和波束的形成 一个单波束在水中发射后,是球形等幅度传播,所以方向上的声能相等。这种均匀传播称为各向同性传播(isotropic expansion),发射阵也叫各向同性源(isotropic source)。例如,一个小石头扔进池塘时就是这种情况,如图2.7所示。
多波束测深系统声速校正
多波束测深系统声速校正 3 何高文 (广州海洋地质调查局二海,510760) 摘要 海水声速是多波束测深系统进行水深测量的基本参数之一,声速剖面正确与否直接影响测量结果的精度和可靠性。本文阐述了声速对多波束水深测量的影响机理,并通过对南海SA 12试验区采集的声速资料的分析,以SeaBeam 2100多波束测深系统为例,对声速校正的技术方法进行了探讨。 关键词 海洋 声速校正 多波束测深 SeaBeam 2100测深系统中图分类号:P 73312 文献标识码:B 前言 自1994年原地矿部引进第一套多波束测深仪(SeaB eam 2100系统,安装于“海洋四号”船)以来,我国先后引进了多套深、浅水多波束测深系统,在大洋矿产资源调查和目前正在开展的近海大陆架及专属经济区的地形勘测中,发挥了巨大作用,引发了一场海底地形测量的革命,为有效地维护国家权益和即将开展的海域划界作出了很大贡献。 如何保证测量数据的精度及其可靠性,是任何测量仪器必须关注的问题,多波束测深仪也不例外。作为一种有别于传统单波束测深仪的水深测量仪器,影响多波束测深数据的因素 有很多,其中海水声速(简称“声速” )是重要的因素之一。下面以SeaB eam 2100系统为例,探讨声速对多波束测量数据的影响以及声速校正的技术方法。 由于SeaB eam 多波束测深系统的水深测量值是根据发射声波的往返时间与声波在海水中的传播速度来确定的,因此,及时为系统提供当时当地准确的声速值是获取可靠水深测量数据的基本保证之一;此外,多波束测深系统对所输入的声速数据量有一定的限制,不同的数据取点,也将对测量结果产生影响。与传统的单波束测深仪相比,多波束测深仪对声速的要求更为严格(见后述)。所以,为了获得准确可靠的多波束测深数据,必须进行声速校正。通过对南海SA 12试验区海水声速系统测量结果的研究,获得了声速变化规律的认识,从而为SeaB eam 系统的声速校正提供科学依据。 1 声速影响因素 海洋中的声速是一个比较活跃的海洋学变量,它取决于介质中的许多声传播特性,随季 收稿日期:2000204220第19卷 第4期2000年12月 海 洋 技 术O CEAN T ECHNOLO GY V o l 119,N o 14 D ec,2000
(完整版)多波束测深与测扫声呐的比较
多波束测深与测扫声呐的比较: (1)侧扫声纳是目前常用的海底目标(如沉船、水雷、管线等)探测工具,在测深领域,多波束以全覆盖和高效率证明了它的优越性。由于多波束具有很高的分辨率,目前在工程上已经开始应用多波束进行海底目标物的探测。 (2)多波束的最大优点在于定位精度高,但其适用范围不如侧扫声纳广泛,尤其受到水深和波束角的限制,多波束和侧扫声纳在探测海底目标时具有很好的互补性,同时应用可以提高目标解译的准确性。 (3)侧扫声纳能直观地提供海底形态的声成像,但这种声像只能由目标影子长度等参数估计目标的高度,所以对数据解译人员的要求很高。多波束测深系统主要用于进行水下地形测量。 (4)探测目标机制的差异:多波束是一种测深工具而并非成像系统,无法直接在记录纸上进行打印,必须先构建数字地形模型(digital terrainmode,l DTM),再根据DTM构建地貌影像图,从而能够反映细微的地形起伏所导致的坡度和坡向变化;此外,多波束的中央波束探测效好,边缘波束效果差;多波束采用三维可视化的方法进行目标判断,在3D GIS系统中可以直接提取目标物的平面位置和高度,还能够从不同的角度进行观察,便于掌握目标物的形状特征。但是,除非我们在进行测深的同时采集反向散射强度信息,否则我们无法得到与目标物的底质类型相关的信息,因此,多波束比较适合于沉船或者管线等容易根据形状进行判断的目标。 现在的侧扫声纳技术有两个缺点,首先它的横向分辨率取决于声纳阵的水平角宽,分辨率随距离的增加而线性增大,其次它给不出海底的准确深度。当前只有两种声纳可做海底三维成像,即等深线成像和反向散射声成像,前一种是多波束测深声纳(如Multi -beamSonarSystem) ,后一种是测深侧扫声纳。总体说来,前者适宜于安装在船上做大面积测量,后者适宜于安装在各类水下载体上,包括拖体、水下机器人(AUV) 、遥控潜水器( ROV ) 和载人潜水器(HUV) ,进行细致的测量。 侧扫声纳通常安装在拖体上,其到海底面的距离是可以调节的,而多波束换能器大多数固定安装在船体上,随着水深的增大,换能器至海底的距离增加,导致波束与海底面的接触面即脚印 变大,所以多波束垂直于航行方向的分辨率降低。此外,水深增大也导致换能器单位时间内能够接收到的有效声信号数目(即采样更新率)减少,因此沿着航行方向的分辨率同样降低。 侧扫声纳不存在波束角的问题,而Seabat8101的波束角为115b,每个声波波束与海底面的接触面被视为一个水深点,因此波束角的影响与水深是正相关的。 在同样的海况条件下,多波束数据的信噪比常常比侧扫声纳图像要高,这是因为多波束的旁瓣波束被有效压制,因而没有假回波。 多波束的定位精度比侧扫声纳要高2~5m。这是因为,一方面多波束的平面位置误差传递方程比侧扫声纳系统要简单;另一方面多波束系统中的电罗经和船资测量传感器具有很高的精度,可以精确地测定船体的姿态和船首向;此外,多波束系统的校正比超短基线要容易,各种系统 误差的消除也更为彻底。因此,对于多波束靠近中央波束所探测到的海底目标,可以认为其定位精度近似地等于GPS本身所能提供的精度。
使用FANSWEEP20型多波束测深仪最佳数据质量的获取方法
FANSWEEP 20 型多波束测深仪 获取最佳质量数据方法 上海达华测绘公司高炎 [摘要] 目前国内外对多波束的应用、开发技术层出不穷。多波束的种类和各个品牌的技术特点也各有不同。相关的技术人员对其技术通性应有一定的了解。对于FS-20型多波束介绍的相关信息比较少。本文以一种应用的角度介绍了FS-20型多波束。从原理引申开来,结合笔者的实践,详细介绍了FS-20的各个参数的性质和设置方法,以及对测量结果的影响程度。以实际工程例子做出具体的说明 [关键字]FANSWEEP-20、多波束、数据质量 一、引言 伴随现代科技的发展,如今的水运工程技术有了长足的进步,出现了许多前所未有的高新技术测量手段。由于在疏浚工程中,人们对海底地形地貌测量的要求日益提高,传统的单波束测量技术由于其测量效率,可靠性上的局限,已无法完全满足当代疏浚工程中的各种新需求。正是在这种背景下,我公司与2000年6月引进了德国FAN SWEEP 20型多波束测深系统,使我公司测量技术发生巨大的变革,即将测深技术从原先的从点到线扩展到由线到面,并进一步发展到立体测深和自动成图。 由于多波束技术采用了广角度和多信道定向接收技术,获得水下高密度条幅式海底地形数据,从而彻底刷新传统测深技术的基本概念。经过近一年多来的工作,我们从测深原理系统构成、射线几何学、误差来源与分析、校正技术等方面进行不断的消化,吸收和实践。从而掌握和形成适用水运工程测量特点的新的水下地形测量技术框架。下面将获取FS 20型多波束系统最佳质量数据的操作和测量方法介绍一下。 图一
二、系统构成和工作原理概述 完整的多波束系统由多波束的多阵列发射/接受换能器,用于信号控制处理的电子柜,运动传感器,定位系统(如DGPS、或RTK DGPS);声速剖面仪和其它必要的外围设备组成。如图一所示。 所以换能器的工作过程可以简单的分为:信号发射和信号接收如图二所示 图二 多波束系统在工作过程中,同时发射的波束对海底形成一个覆盖式条带,此条带宽度由波束的发射开角决定,而波束发射角由发射模式控制参数决定。船姿传感器的船姿信号和波束数据被一起传送给信号处理器,信号处理器根据这些信息计算出脉冲发射信号和波束数据,然后这些数据被送到多通道变换器,形成多个波束发射信号,这些信号在经多通道前置放大器进行功率放大,分别形成多个声波发射脉冲信号,同时多通道前置放大器控制着收、发转换开关电路,这些声波发射信号分别被送到换能器阵列中相应的换能器单元,并发射出去。 接收信号的电子过程与发射信号的电子过程是相反的,就是利用压电陶瓷的压电效应把声能转换为电能。只是这个信号还要经过复杂的信号处理才能生成反映海底地形、地貌的数据。 多通道的前置放大器将从换能器接收来得多路回波信号进行放大,此放大过程受时间增益(TVG)信号的控制。放大后的模拟信号输送给数据采集电路,在这里,模拟信号被转变为数字信号。信号经多通道信号处理器处理后形成地形、地貌数据,输出到外部设备。 信号接受过程中,与单波束测深仪显著不同的是信号处理电路中的波束形成、控制电路。声波在传播过程中若不是垂直射入,受声速影响,传播路径会发生变化,即声波的折射现象,若不改正,由此计算出来的水深是不正确的。波束形成、控制电路作用就在于对波束的传播路径进行改正。此电路可以从存储电路读取存在其中的一些参数(如各海水层声速数据),利用此数据将未经改正的数据进行改正。 通过信号流程的分析,为寻找误差源,分析误差以及进一步消化吸收新的
EM950多波束系统简介
Simrad EM950多波束测深系统及其相关设备的简介 刘胜旋 (广州海洋地质调查局第二海洋地质调查大队510760) 摘要本文主要介绍挪威Simrad公司的EM950型多波束测深系统,对系统的各个关键部件如换能器、底部检测单元、操作单元等进行了较为详细地介绍,同时还对系统参数测试的步骤进行了详细的描述,最后是与系统相配套使用的其它相关设备。 关键词Ping(声脉冲),陶瓷感应棒(ceramic stave),Pitch,Roll,Swath(条幅),OPU,DPU 一引言 多波束测深(Multibeam Echo Sounding)系统的出现,为研究海底地形地貌、寻找沉没于水中的飞机船舰、进行水下考古、铺设海底管线、航道岸提测量、工程疏浚的土方计算等一系列工作提供了可靠的手段。为了顺利完成“我国专属经济区和大陆架勘测”专项(简称“126”专项),我国多家从事海洋地质研究的单位于1998年从挪威Simrad 公司分别引进了多套EM系列多波束测深系统。其中国土资源部(原地矿部)广州海洋地质调查局引进了一套EM950型及一套EM3000型的多波束测深系统。现结合一年来的使用经验系统地介绍一下EM950型多波束测深系统的技术指标、工作性能、各种参数的校正及相关设备等内容。 二Simrad EM950多波束测深系统 (一)基本技术指标 Simrad EM950 是一种高分辨率海底地形测深系统。它的主要技术指标为:发射频率:95kHz 脉冲宽度:0.2ms 测深范围:探头以下3-400米 波束宽度: 2.3°×3.3° 覆盖宽度:最高可达7.4倍水深 波束数:120个(每个脉冲60个) 测深精度:15cm或0.25%水深 EM950采用95 kHz的发射频率,这个频率兼顾了在海水和淡水中的工作能力。其在海水中的吸收系数大约为30dB/km,当所测水深大于140m时,可以得到1000m的水平覆盖宽度。在淡水的吸收系数大约为2—3dB/km。当在河口或河口附近等含有大量泥沙的水域中工作时,因其发射频率的特殊性,它的测程并不会因吸收衰减而受到太大的影响,但会因
多波束系统操作流程
R2Sonic 20XX 多波束操作流程 一、参照如下配置清单: 二、连接示意图如下: 1 表面声速探头 2024 换能器
三、操作流程 1.前期准备 了解测区概况,包括测区的水文、潮汐和地质情况,测区中央子午线、投影及坐标转换参数等内容。 2. 设备安装 如上图所示,将多波束和表面声速探头安装到导流罩上,并通过安装杆固定到船上,要保证船在航行的过程中,多波束安装杆不能抖动,否则无法保证数据的准确性。
3. 系统接线 安装GPS及光纤罗经Octans,按照连接示意图,完成多波束及辅助设备的连接。 4. 系统供电 PC开机,GPS、Octans和SIM(多波束声纳接口单元)通电。 5. 声速剖面测量 测量船开到测区,停船。参照说明书《MinosX用户使用手册》,测量声速剖面。 6. 运行R2Sonic.exe多波束控制软件,参照说明书《Sonic 2024 使用指南》。 如果SIM盒上没有外接表面声速探头,则在Settings->Ocean settings…,勾选Sound velocity,输入探头所在深度的声速值,SVP的指示灯显示为黄色。 如果SIM盒上没有外接姿态数据(TSS1格式,100hz),且Settings->Sensor settings…,Motion的Interface选择Off,那么,MRU显示为灰色。 一定要保证GPS、PPS的指示灯为绿色,时间显示为格林威治时间,否则,表明时间没有同步,不能进行下一步操作。 调整Power,Gain等参数,保证水深条带数据的质量。Sonic control 2000软件在测量的过程中一直开着,并观察数据质量。
多波束安装步骤
一、系统配置 1、多波束声纳传感器 2、电源线、网线(用于多波束与电脑之间数据传输)、电缆线(连接GPS与RPH至电脑)、USB转串口线2根 3、RPH传感器 4、GPS及天线 5、高配置电脑(100M以上网卡、双核或四核以上、WinXP系统、处理器2.8GHz以上) 6、导航船与安装支架 7、直流电源24V (I max=2A) 二、具体要求 1、连接电源线与网线到多波束装置,用24V直流电源,将网线插到多波束网口里,另一端连至笔记本; 2、将USB转换器插到电脑上获取串口号; 3、将USB转换器与RPH传感器和GPS连在一起; 4、连接RPH电源与GPS电源; 5、第一次运行软件时需配置笔记本的系统配置; 5.1、安装USB转串口驱动 5.2、禁用杀毒软件及无线网络 5.3、禁用省电模式 5.4、配置本地IP:192.168.1.188,子网掩码:255.255.255.0 5.5、配置网络适配器速度为“自动侦测” (设备管理器--网络适配器--属性--高级--连接速度和双工模式--自动侦测) 5.6、使用“msconfig”程序时禁启后台所有任务 (Microsoft System Configuration,系统配置实用程序,“开始”--“运行”--键入“msconfig”--选择要禁用的程序) 5.7、安装好多波束测量软件 6、安装要求 6.1、GPS、RPH、多波束装置竖直方向在一条杆上,三者的三维坐标方向一致,GPS 坐标(Xg,Yg,Zg),换能器坐标(Xt,Yt,Zt),船坐标(X,Y,Z),O为船重心坐标原点; 6.2、Xt=Xg为GPS所在杆与船重心的X向垂直距离;Yt=Yg=0为GPS所在杆与船重心的Y向垂直距离;Zt>0为换能器入水深;Zg<0为GPS到换能器Z向垂直距离;Zc<0表示船重心在水面以上; 7、校准 7.1、对RPH的角误差进行校准 用Patch Test获取或预设一估值; 7.2、对GPS位置进行校准 GPS天线位置相对于换能器位置的偏离值;GPS延时是GPS记录的延时;
深水多波束测深系统现状及展望
深水多波束测深系统现状及展望 发表时间:2018-12-24T17:24:49.597Z 来源:《基层建设》2018年第31期作者:熊俊董帅帅[导读] 摘要:本文针对多波束测深系统的发展现状及其未来的方向进行分析,为了能够顺应科技技术的进步,和当前国家的局势,明确深水多波束测深系统对我国资源问题的重要性。 中交广州航道局有限公司广东广州 510221 摘要:本文针对多波束测深系统的发展现状及其未来的方向进行分析,为了能够顺应科技技术的进步,和当前国家的局势,明确深水多波束测深系统对我国资源问题的重要性。同时还要理解多波束测深的基本原理和组成成分,有效的在平面垂直状态下,给予一个深度和足够宽度的深水带,很大程度的为海底的地形和有效探测带来好的工作成效。随着当前科技技术不断的发展,我们需要不断的拓展和研究深水多波束测深系统的发展,可以更好的通过辨别度及其深度和覆盖率来完善展望的趋势。 关键词:深水多波;束测深系统;现状及展望 前言 改革开放以来,我国对于各行各业的发展都在不断的拓展,然而当前资源制约已经是我国国民经济发展的阻碍,从我国的地理位置上来看,海洋在我国地球上占有一大半的位置,为了能够保护资源的合理性,就要有效的通过多波束测深系统来完善必要的条件,保证我国可持续发展。从国家的发展局势上维护我国海洋的权益,同时还可以有效的通过该系统建立稳基的重要战略,当前对于水波束测系统来说,随着科技技术不断的进步,传统的单波束测系统已经无法满足整个海洋的局势,不管是效率上、精度上及其扫描上都无法给予帮助,因此,在这个过程中,需要通过多波束测深技术的优势及其高科技来推进时代的重要意义。 1分析多波束测深系统的重要性 第一,从我国主权上来分析,随着经济的发展,可以说全球各地为了能够争夺主权,开始不断的从海洋主权上来划分地域,因此,多波束测深系统技术也得到了进步,从根本上维护了海洋权益和海底的有效开采,然而对于海洋底部来说,需要专业的精密的及其快速的探测来完善该系统的重要性。 第二,从我国的资源问题来说,我们可以从地球仪上来看海洋占地球面积的一半以上,可以说各国都有海洋的划分区域,海洋不但有丰富的资源,还可以通过探测来保护海洋资源的重要技术,这是大局上来完善海底的发展。 第三,对于海底不仅是表面赋予的条件,还可以不断的使得矿产资源完善,结合海洋的优势,通过水的深度、地形及其海洋的构造,然而怎么样才能得以了解矿产的主要条件,就要明确矿产的深度和精密度,因此深水多波束测深系统的发展势在必行,保证我国的可持续发展,同时还有效的通过该技术了解发展的趋势,建立有效的海洋权益的重要性。 2多波束测深系统概述 2.1多波束测深系统的概念 什么是多波束测深系统?主要应用在海洋测量过程中,通过对海水深度的探测,来真实度的反映海底的主要情况,通过束测深的工作原理,来增加发射声波的指导性,同时还有效的提高海底测量的分辨性,把科技技术的计算机数据处理和绘图来完善精确的位置和深度,实现了从点到线再到面上的跨度,可以说是科技进步的一大优势。 2.2结合多波束测深系统来分析其中的原理 首先,该系统主要通过专属的能量来完善发射,通过海底声波进行覆盖,结合计算机系统的整合和收集,进行发射和接收直接照射到海底的地形,还能对每个地形都能够进行收集和探测,当然在探测过程中会出现照射,会留下足迹,同时在一次探测上还可以有效的结合专属的垂直来表面海底的深度值,有效的结合测量精度和宽度来给予大小和形状变化。其次,该技术的束测还可以形成三维技术,需要结合不同的角度,把反射角度进行信号回波,因此这就是束测的主要原理,在多波束测深系统中通过变量的测量,结合距离和声波的转换,再结合转换器的优势来确定距离和水底的角度,来形成具体的定性。 2.3结合现代技术来说,分析多波束测深系统的主要成分 对于多波束测深系统来说,包括的系统比较多,最为常见的就是以声学和信号及其转换器和显示器系统来完善,这是从硬件设施上来说,其次就是软件,通过计算机的数据处理来完善,同时还要有完善的导航系统和采集资源信息,可以说现代技术的定位巡航和GPS技术都无可厚非,在外在辅助系统上,还需要有现代指南针的效应,把测量、定位、数据统计和传感器都实现完善。最后,随着现代深水多波束测深系统来说,我国在该技术上还不算成熟,对于该技术的产业无法完善,因此需要我们不断的发展深水多波束测深系统,从不足之处来不断的实现未来发展。 3 通过高效率、高深度、高便捷来完善深水多波束测深系统的未来发展趋势 为了更加有效的发展深水多波束测深系统来说,需要结合当前发展趋势和技术要求,抛开传统单侧束测系统的不足,不断的学习国外技术的优势,来实现高效率和便捷性的系统。 3.1 多波束测深系统的优势和完善的分辨率 第一,针对多波束测深系统来说,可以说具有很大的优势,从单一束测深系统来说,只能通过单侧来进行海底探测,然而多波束测深系统结合多侧进行分散在海底进行三维空间的分辨,降低相邻的间隔,将水中最小的目标和一些不足以探测的地形进行精细的探测。第二,对于多波束测深系统来说,具有完善的分辨率,主要是通过脉冲系统和有效的宽度和声波及其海底的速度,来进行有效的发射和转化,单侧的波速在速度上和发射频率上不足以接受和转化,然而在多波系统上,通过高阶的波束技术来完善水深,把接收的波速数量来形成测深,为分辨率带来了大大的提高。 3.2从测量深度上更加精准 首先,针对深水多波束测深系统来说,主要使用的范围在深海海底,然而在海底最主要的是具有有效的数据测量标准和完善的精准度,只有这样才能完善其测量的测绘,对于测量的水深来说,怎么样才能完善测量,就是需要通过声速带来的折射效应及其运动中接受的信号来实现补偿。其次,在整个声速过程中,需要通过表面来进行获取信息,结合海深的速度和声速来进行剖析,把声速的折射效应和海底运动的传感器来进行收集信息和接受各种参数,同时还要结合GPS的测量技术来转变,使得精准度达标。最后,精准的测量深度还可以对海底的潮汐情况进行有效的控制,比起传统的技术来说更加精准。