车联网与智能网联汽车CANBUS远程控制产品白皮书
EST560-mini8
车联网与智能网联汽车CANBUS远程控制OBD接头产品白皮书
Telematics and Intelligent Network of automotive CAN BUS Remote
Control White Paper
Rev.1.0—10April2016Product data sheet
1.引言
Car Remote System Based on GSM Network and Canbus
车联网,飞行汽车,空前火热,分时租赁大行其道,网联汽车将覆盖所有的交通,通过汽车总线实现手机远程控制汽车,包涵远程开关门锁,声光寻车、续航里程和剩余电量上报等重要信息,成为行业标准配置。速锐得科技专门为ADAS、分时租赁、BMS电池管理系统、前装车载TBOX、智能后视镜停车监控(无人值守)和反向控制汽车,基于STM32开发新串口通讯EST560-mini8。通过CAN总线,通过GSM网络对汽车本身实现远程控制。
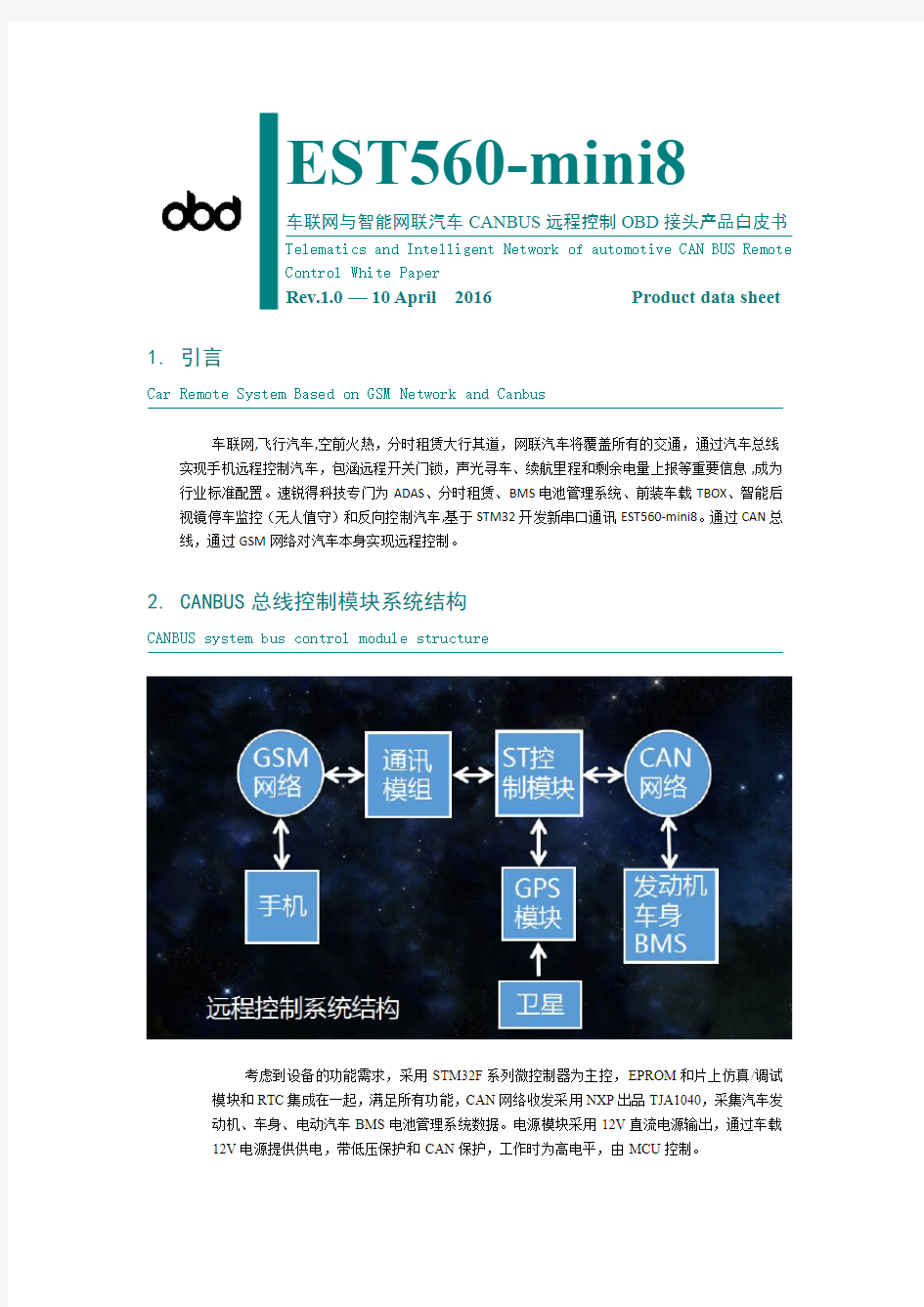
2.CANBUS总线控制模块系统结构
CANBUS system bus control module structure
考虑到设备的功能需求,采用STM32F系列微控制器为主控,EPROM和片上仿真/调试模块和RTC集成在一起,满足所有功能,CAN网络收发采用NXP出品TJA1040,采集汽车发
动机、车身、电动汽车BMS电池管理系统数据。电源模块采用12V直流电源输出,通过车载
12V电源提供供电,带低压保护和CAN保护,工作时为高电平,由MCU控制。
设计特点:
1、结合原车CANBUS总线设计。
2、无需GPS采集本车速度。
3、ACC检测OBD接口具备天然优势。
4、无需破线。
5、HUD等智能硬件同样适配。
6、智能后视镜停车监控功能浑然天成。
3.设计理念
Design Concept
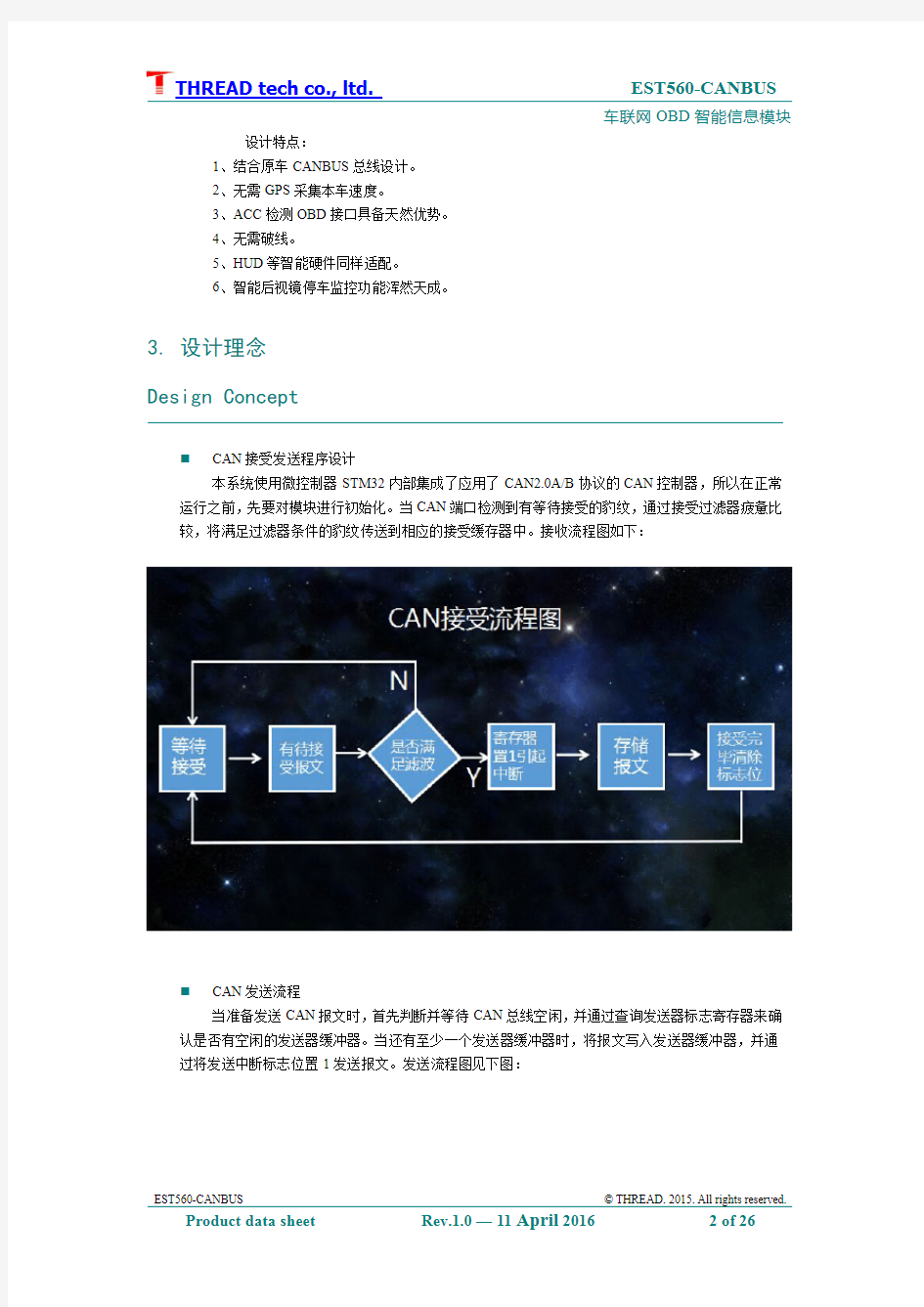
?CAN接受发送程序设计
本系统使用微控制器STM32内部集成了应用了CAN2.0A/B协议的CAN控制器,所以在正常运行之前,先要对模块进行初始化。当CAN端口检测到有等待接受的豹纹,通过接受过滤器疲惫比较,将满足过滤器条件的豹纹传送到相应的接受缓存器中。接收流程图如下:
?CAN发送流程
当准备发送CAN报文时,首先判断并等待CAN总线空闲,并通过查询发送器标志寄存器来确认是否有空闲的发送器缓冲器。当还有至少一个发送器缓冲器时,将报文写入发送器缓冲器,并通过将发送中断标志位置1发送报文。发送流程图见下图:
?主判断动作程序
在初始化各项配置寄存器及变量后,判断是否有GSM模块的新提示信息,若有则判断是否提示收到短信,若是则以AT命令通讯GSM模块输出短信内容,并判断是否为预设内容,根据预设短信的要求执行预定程序。流程图如下:
?系统功能设计
由于EST560-mini8与汽车CAN总线相连,所以要对于整个车辆的状态能准确把握。同时,在升级功能方面,采用了远程OTA升级,可以通过云端直接下载固件到主机。可以将报警信号自动发送到主机,主机远程可以控制汽车实现声光寻车等功能,同时可以采集电动汽车BMS系统如下八个方面的信息:
1、剩余电量百分比(SOC)
2、电池健康状态(SOH)
3、电池包整体电压
4、电池包整体电流
5、最高单体电压,最低单体电压
6、最高单体温度,最低单体温度
7、BMS充电状态
8、BMS故障状态
?外形设计
采用插头式工业设计,对外用串口线输出,便于即插即用,无损安装,提供ACC点火判定、供电及数据。
?架构设计
内部架构处理为多核分布式处理,OBD解码数据处理与主控MCU分离,保证ACC信号检测数据读取精准、计算有效;
?趋势设计
智能OBD插头自适应当前先进技术(支持发动机自动启停、支持多CAN等黑科技),支持实时数据流获取,驾驶习惯数据获取,熄火自动生成本次行程报告;
?参数及保护设计
采用TVS保护、输入反接保护、CAN总线保护、低电压保护、串口电平多重保护机制;
?休眠唤醒设计
采用低功耗休眠、点火唤醒、总线唤醒、Gsensor唤醒(定制)、震动唤醒、串口唤醒(定制);
?电气参数设计
输入电压:12V/9V
输出电流:3A
输入输出转换:DC/DC
最高输入电压:40V
?处理器设计
采用32位单片机,72M主频,对外采用用TTL/RS232电平。
?CAN设计
OBD及CANBUS部分采用原车私有协议,请索取:EST560车联网CANBUS模块数据手册V1.3。
支持CAN总线协议,可有效采集总线上的数据,针对市面上的车型,采用专车专用匹配,不同品牌车型采用不同固件,例如:宝马、奔驰、奥迪、丰田、大众、日产、起亚、现代、通用。
EST560支持远程升级,我们采用的是云服务器OTA升级。
有效采集发动机数据、采用监听获取的方式,有效检测总里程数据、油耗、故障码。
EST560带有车身数据、钥匙状态、中控警告、转向角度和汽车远程控制。
4.架构树
schema tree
5.产品应用
Applications
?车联网?车载TBOX
车载TBOX汽车远程控制系统通过CAN总线得到车辆各项信息并发送动作消息,通过GSM模块与用户交流沟通,通过GPS模块定位车辆的位置,涵盖了用户在远程控制方面的各
项要求,方便不同的用户、不同的车型提供不同的功能和服务,有很好的扩展性,该系统既在
功能方面给了车主很大的方便,同事在汽车防盗方面,也起到了重要的作用。
?智能硬件?HUD抬头显示器
?安防追踪?GPS定位器
?分时租赁?电动汽车TBOX
?ADAS?智能后视镜
小蚁、车叮咚、智行畅联、京华等国内知名企业推出智能后视镜,后续将爆发一系列的功能对比和新型产品形态。
6.支持汽车协议类别
序号协议名称
国际标准
1CANBUS_11B_500K ISO15765(CANBUS)
2CANBUS_29B_500K 3CANBUS_11B_250K 4
CANBUS_29B_250K
7.硬件组成
类型
名称型号
生产商主机
MCU STM32F103C8T6ST OBD
EST527THREAD 电源-TI CAN 1040C NXP 电容MU 村田、三星电阻
-三星、村田配件OBD 定制线宝马头、USB 接头定制壳料ABS 、PC -中广瑞达插针
OBD 端子铜镀镍
中广瑞达
8.宝马接头5PIN 和8PIN 接口示例:
9.大致形态product appearance
10.外形尺寸单位:(mm)
11.横向对比
Horizontal comparison
业内产品:
业内ADAS多采用算法+GPS,无法精准判定车速是其一,因为GPS信号丢失是没有车速,其二,精准的转向灯数据无法通过CAN总线采集,导致很多产品安装复杂,并没有什么成本优势。
ACC信号输出大部分采用直接用电压检测,劣势在于电瓶老化、高端汽车电瓶充足的不会出现大电流,采用电压判断不准,ACC信号输入不稳定。
业内产品多无震动唤醒,没有做预留接口。
通过持续检测高电压状态,ACC很多不会打开,不读OBD数据,会有很长的延时或者不休眠,导致智能后视镜重启。
电流大小、延时、后拉摄像头都会存在不同情况,在满负荷测试情况下,通过电压跳变判断会有很大概率导致后视镜重启或者检测不到信号,甚至设备不启动工作。
ADAS算法误报率极高。
本设计方案:
通过CAN总线,直接读取钥匙状态。
K线车,可请求车速。
货车直接采集Gsensor。
汽车兼容覆盖率可达99%,剩下1%奇葩车,置之不理。
修订记录
版本日期作者变更表述
1.02016-02-11刘国琼初稿
12.汽车防撞预警系统工作及功能
Automobile collision warning systems work and function
通过摄像头传感器采集外部信息,系统通过驾驶辅助主控单元,完成对车辆周边信息的汇总,该主控单元内部集成了前方图像处理单元(front image processing)、周边图像处理单元(surround image processing)、传感器主控单元(sensor fusion host)和应用主控单元(application host)四部分。时刻监测车道和前车速度、方向、以及双方车间距、通过分析车辆前方的各种图像和传感器信息,快速对静、动态物体的识别、侦测与追踪等技术上的处理,来计算出车辆前方状况的综合模型并对车辆的行驶状况做出预警提醒。使驾驶员能够做出反应,从而避免事故发生。
ADAS汽车防撞预警系统同时可具有前碰撞预警(FCW)、车道偏离预警(LDW)、车距监测(HMW)、前车起步提醒(FVSA)、前车接近报警(FPW)、行车记录(DVR)等功能的专业ADAS汽车安全系统。
13.汽车ADAS防撞预警系统用户体验提升
ADAS car collision warning system to enhance the user experience
1:产品在驾驶者无意识偏离当前车道时预警提醒,遇与前车距离过近时提前发出警报,避免车辆碰撞。
2:可结合原车机屏显示前车距离及安全车距数据,直观体验。
3:镜头贴合牢固,位置隐蔽不阻碍视野。
4:前车起步提醒在遇红灯长龙时,提醒汽车已启动,可缓解拥堵带来的焦急感。
5:高速路段,与前车安全距离完美体现,由此可自由控制驾驶速度。
6:操作方便,设置方便,功能多样,简单好用。
14.EST560-mini6性价比超高
国内首家专注ADAS中CAN总线专业研发厂家。
1:性能卓越
采集CANBUS总线车速、转速、门、窗、灯、锁、中控警告、尾箱、天窗等状态和控制,单双CAN支持。
2:功能实用
可结合原车机屏,也可直观输出给ADAS主机。
前轮转向角数据可支持360全景倒车。
3:价格亲民
国内外车企品牌众多,而相应的高低配置也有所区别,相对于以色列品牌MOBILEYE来说,动辄上万元的价格,本ADAS智能线束堪称业内性价比最高,可OEM、ODM。
15.产品特征
?标准OBDII接口支持
?深度解析原厂CANBUS总线数据
?自带IAP功能,支持各个车型版本远程固件升级
?带动作执行(反向控制)功能
?上位机无需进行任何运算,所有数据都以数值方式返回
?车辆点火自动唤醒,车辆熄火自动休眠
?自动匹配带【发动机自动启停】功能的车辆
?精确读取原车仪表盘总里程
?支持瞬时油耗、平均油耗及耗油量数据
?支持实时故障码扫描
?支持急加速、急减速等驾驶习惯统计
?模块化设计,高集成度
?车规级抗干扰设计
?邮票孔设计,超小尺寸26mm*16mm
?AT指令集简单易用
?极大的提升开发效率,缩短研发周期
16.电气参数
序号参数最小值最大值单位1工作电压 5.0V 2工作电流2040mA 3工作功耗100200mW 4休眠电流0.5 2.0mA 5休眠功耗 2.510.0mW 6工作温度-2070℃7存储温度-4085℃8ESD耐压-8+8KV
9模块尺寸如图mm 10接口标准UART
11波特率9600/38400/115200BPS
Table2.模块参数列表
17.模块休眠功耗及自动启停识别
汽车的OBD接口直接连接汽车电瓶正负极,故采用OBD口取电(24小时长电)成为车联网应用中的一个亮点,但如何控制好休眠管理,不使耗电导致汽车电瓶亏电打不着车,也是一个技术难点。
首先,EST560-CANBUS模块自带熄火休眠功能,且休眠电流最低至0.5mA,完全满足低功耗设计需求。模块休眠后,有两种唤醒方式,一是RST/WKUP引脚唤醒,另一个是当汽车点火启动时,EST560-CANBUS模块会随车唤醒,立即进入工作模式。
仅在EST560-CANBUS模块被点火唤醒时,会通过RUN_INT引脚对外输出一个时长为200ms的低电平脉冲信号,以通知外部设备或上位机该汽车启动讯号。
目前新出的高配车,都带有发动机自动启停功能,在等红灯时会自动关闭发动机达到节能环保目的,针对这一功能,EST560-CANBUS做了特别设计,自动智能识别带发送机自动启停功能的车辆,达到启停状态下不会中断本次行程这一目的。
18.车辆点火熄火流程
点火流程
序输出内容
1
2串口输出:System running…
3
4串口输出:$EST560,Connect to ECU success.
5实时数据流输出
熄火流程序输出内容
1
串口输出:$OBD-TT,n,n,n,n,n,n,n,n,n,n
(本次行程统计数据流)
2
3串口输出:$EST560,System sleeping.4
模块休眠
19.AT 指令集
AT 指令全为大写,均以回车、换行字符结尾:\r\n (0x0D 0x0A )。
AT 指令指令功能数值范围返回格式
AT296
获取汽车VIN
码
17位(部分车型支持)$296=s AT297电瓶电压0–max V $297=n
AT298
瞬时油耗
怠速:0–99L/h
行驶:0–99L/100km
$298=0,n (怠速)$298=1,n (行驶)AT299
百公里平均油
耗
0–99L/100km
$299=n
AT300
里程信息
$300=本次里程,累计里程,总里程
(km )
AT301耗油量信息$301=本次耗油量,累计耗油量(L)AT302
总里程校准
发AT302=仪表盘显示里程值,校准
总里程
初次使用时校准;建议定期校准
AT303
驾驶时间信息
$303=本次怠速时间,本次行驶时间,
累计怠速时间,累计行驶时间(本次时间单位s,累计时间单位h)
AT400读取故障码
$400=故障码数量,故障码详情(竖线
分隔如P1001|P1002)建议在怠速状态下读取
AT401清除故障码清除完成返回$401=OK
AT500设备信息
$500=汽车协议名称,模块SN号,硬
件版本,软件版本
AT501清除保存数据
清空存储在EEPROM中的数据,恢复
到出厂状态
ATADASON开启ADAS模式
默认以5Hz的频率输出车速、转向角
度、档位信号数据
只针对指定车型ATADASOFF关闭ADAS模式关闭ADAS数据输出只针对指定车型
Table 4.产品AT指令集列表1
AT指令指令功能指令说明
ATRON打开实时数据流广播执行后,按1HZ频率对外广播(详见17.1)ATROFF关闭实时数据流广播关闭广播
ATHBT请求驾驶习惯数据流返回驾驶习惯数据流(详见17.2)
ATWST系统热重启保存当前行程数据后,重启模块
ATSLEEP进入休眠模块立即进入低功耗休眠状态
Table5.产品AT指令集列表2
20.AT指令补充说明
1、所有AT指令均以\r\n做为结束符;
2、除AT297(电瓶电压),AT500(设备信息),AT501(清除保存数据),AT300(里程信息),AT301(耗油信息),AT302(里程校准),AT303(驾驶时间),其余指令仅在ECU连接成功后才有响应;
3、AT指令请求间隔建议大于300ms;
4、AT296(获取汽车VIN码)指令响应时间为1000ms;
21.总线控制指令
序号控制单元功能控制指令说明
0输出状态值AT+C00(详见14)
1车门锁解锁AT+C01
重复操作请间隔3秒落锁AT+C81
2车窗降窗AT+C02升窗AT+C82
3天窗打开AT+C03关闭AT+C83
4汽车喇叭打开AT+C04关闭AT+C84
5安全喇叭打开AT+C05关闭AT+C85
6双闪打开AT+C06关闭AT+C86
7近光灯打开AT+C07关闭AT+C87
8远光灯打开AT+C08关闭AT+C88
9位置灯打开AT+C09关闭AT+C89
10前雾灯打开AT+C0A 关闭AT+C8A
11后雾灯打开AT+C0B 关闭AT+C8B
12后尾箱
打开AT+C0C
关闭AT+C8C Table6.产品总线控制指令集
22.总线状态输出说明
序号单元取值范围
$OBD-CS起始标头
0流水号累加(每次重启清零)
1左前车门0x03,0x05
2右前车门0x03,0x05
3左后车门0x03,0x05
4右后车门0x03,0x05
5后尾箱0x03,0x05
6左前车窗0x03,0x05
7右前车窗0x03,0x05
8左后车窗0x03,0x05
9右后车窗0x03,0x05
10天窗0x03,0x04,0x05
11左前车门锁0x01,0x02
12右前车门锁0x01,0x02
13左后车门锁0x01,0x02
14右后车门锁0x01,0x02
15档位信号见档位状态列表(Table10) 16钥匙状态见钥匙状态列表(Table9) 17手刹信号0x06,0x07
18刹车信号0x0f,0x10
19左转灯0x05,0x09
20右转灯0x05,0x09
21双闪灯0x05,0x09
22位置灯0x05,0x09
23近光灯0x05,0x09
24远光灯0x05,0x09
25前雾灯0x05,0x09
26后雾灯0x05,0x09
Table7.产品总线状态输出说明
应用举例:
发送指令
>AT+C00
接收
>$OBD-CS,1,5,5,5,5,5,3,3,5,5,5,1,1,1,1,4,2,7,15,5,5,5,5,5,5,5,5\r\n
说明:
1.总线数据上报至上位机后,上位机必须在200ms内回复一个字节(0xAE),否则下
位机会重复发送(最多3次),直到收到回复字节;若超过3次仍未收到回复,
下位机将丢弃当前数据包。
23.车身状态定义列表
23.1状态定义列表
序号状态值(HEX)状态说明
10x01已锁
20x02未锁
30x03未关闭
40x04半开
50x05关闭
60x06拉起
70x07放下
80x08折叠
90x09展开
100x0A启用
110x0B禁用
120x0C异常
130x0D报警
140x0E未报警
150x0F激活
160x10未激活
150xFF未知(默认初始状态)
Table8.产品车身状态定义列表
23.2钥匙状态信息定义列表
序号状态值(HEX)状态说明10x01OFF 20x02ON
30x03ACC 40x04START 50x05未知
Table9.钥匙状态定义列表
23.3变速箱档位信息定义列表
序号状态值(HEX)状态说明10x01P档20x02R档30x03N档40x04D档50x05S档60x06手动1档70x07手动2档80x08手动3档90x09手动4档100x0A手动5档110x0B手动6档120x0C手动7档130x0D手动8档
Table10.产品变速箱档位信息定义列表
24.车型标定指令
序号标定指令标定车型
丰田系列
0AT+VT=0200标准OBD,只支持丰田总里程读取(默认标定车系)1AT+VT=02012015款丰田皇冠
2AT+VT=02022015款丰田锐志
3AT+VT=02032015款丰田RAV4
4AT+VT=02042015款丰田卡罗拉
5AT+VT=02052015款丰田普拉多
6AT+VT=02062015款丰田埃尔法
7AT+VT=02072015款丰田凯美瑞
8AT+VT=02082015款丰田汉兰达
9AT+VT=02092013款丰田威驰
10AT+VT=020A2007款丰田锐志
日产系列11AT+VT=0400日产标准OBD,只支持日产总里程读取12AT+VT=04012013款日产轩逸
13AT+VT=04022010款日产轩逸
14AT+VT=04032010款日产轩逸
15AT+VT=04042010款日产奇骏手动四驱
16AT+VT查询当前标定车系
Table11.产品车型标定指令
说明:不同车系的固件不支持标定成其他车系,比如丰田的固件,不能标定为日产系列的车系,若标定错误,系统返回“?”
《国家车联网产业标准体系建设指南(智能网联汽车)(
《国家车联网产业标准体系 建设指南(智能网联汽车)(2017)》 编制说明 一、背景与概述 (一)定义与内涵 智能网联汽车(Intelligent&Connected Vehicles,简称“ICV”)是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。 (二)国内外技术及产业发展现状 作为汽车与信息、通信等产业跨界融合的重要载体和典型应用,智能网联汽车代表了汽车技术和产业未来发展的方向,也是国际汽车产业未来竞争的重要阵地。包括欧、美、日在内的汽车工业发达国家和地区都将智能网联汽车作为汽车产业未来发展的重要方向,通过加强共性技术研发、示范运行、标准法规、政策鼓励等综合措施引导和促进产业发展,并在智能网联汽车发展方面构建了协调、协作机制。 在规划和战略层面,美国从上世纪九十年代初开始,通过实施
“智能交通系统(ITS)”项目,支持智能网联汽车相关技术和产业发展,2009年和2014年分别以网联化和自动驾驶为重点发布战略研究计划,并于2016年发布自动驾驶汽车政策指南。欧盟议会早在1984年即通过关于道路安全的决议,并于1988年正式启动了“车辆安全专用道路设施(DRIVE)”项目,持续资助对智能网联汽车相关技术研发和应用。2015年,欧盟发布GEAR2030战略,聚集汽车、IT、通信、保险和政府等方面,重点关注高度自动化和网联化驾驶领域等推进及合作。日本政府也将自动驾驶和车车通信作为重要方向和目标,通过车辆信息与通信系统(VICS)、先进安全汽车(ASV)等项目支持技术研发与应用。2014年,日本发布《战略性创新创造项目(SIP)》,将自动驾驶作为十大战略领域之一。 在技术和产品层面,欧、美、日等国家和地区的整车企业,如奔驰、宝马、沃尔沃、通用、福特、特斯拉、丰田、日产等已经实现先进驾驶辅助系统,正在普及推动PA级自动驾驶产品的商业化,部分高端品牌已计划推出CA级自动驾驶产品;各国在整个产业链上的合作日益加强,相互持股与并购的情况日益普遍,通信、信息、电子、整车等行业深度融合发展。美国在网联化技术、智能控制技术、芯片技术等方面处于优势地位,产业上、中、下游实力均衡,欧洲拥有强大的汽车整车及零部件企业,日本则在智能安全技术应用上较为领先。 我国政府高度重视智能网联汽车相关技术及产业发展,工业和信息化部、发展改革委、科技部等相关政府部门,先后安排专项资
智能网联汽车政策法律研究报告
《智能网联汽车政策法律研究报告》 10 月引引言言智能网联汽车是汽车工业和人工智能技术结合的全新产物,是我国抢占汽车产业未来战略的制高点,也是人工智能大规模应用的重要场景。 智能网联汽车的发展将引发汽车工业,交通形态,社会分工等等方面巨大的变化,同时也必然会对既有的社会秩序和规则带来挑战。 法律规则建设是智能网联汽车发展中非常重要的一环。 一方面由于智能网联汽车给社会生活带来的新变化,许多传统立法的规定不能适用于智能网联汽车,甚至会对智能网联汽车上路行驶或运输服务构成限制,需要及时对这些立法做出调整或解释,减少对智能网联汽车产业发展的阻碍;另一方面,智能网联汽车带来的新业态、新秩序需要新的规则予以调整,科学有效的法律制度供给能够促进新业态的良性健康发展,也有利于增加公众对于智能网联汽车的接受程度。 因此,赛迪研究院政策法规研究所对智能网联汽车发展涉及到的法律问题做了比较系统地研究,我们认为智能网联汽车既需要新的法律规则,同时更需要新的治理理念,以治理创新推动产业创新,以规则之变促进业态之变,使我国能在未来产业
竞争中获得制度优势。 在10 月北京举行的首届世界智能网联汽车大会上我们发布月,沃尔沃汽车公司宣布对其全自动驾驶系10 了《更新而成了. 统造成的人员、财产损伤承担责任,奥迪官方也于表示如果奥迪车在自动驾驶模式下发生事故,公司将承担全部责任。 但规则制定不能倚赖企业的道德责任,对于智能网联汽车的事故责任,需要区分是否有人为干预,是否存在设计缺陷,算法的合理性,对车辆的可责性等不同情况,分别制定对应的责任规则。 6 二、二、全球主要国家和地区的规则修订进程全球主要国家和地区的规则修订进程(一)美国(一)美国1.联邦层面:避免技术路线干预,负责构建安全框架联邦层面:避免技术路线干预,负责构建安全框架美国的智能网联汽车起源于智能交通系统美国的智能网联汽车起源于智能交通系统,,成名于自动成名于自动驾驶技术驾驶技术,,正迈向车路协同发展正迈向车路协同发展高级阶段高级阶段。 。 美国的智能网联汽车起步于代,当时的重点在于依托智能交通系统的整体发展推进汽车网联化。
智能网联汽车与车联网
一、智能网联汽车定义、关键技术、系统构成、功能等 智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,使车辆具备复杂环境感知、智能决策、协同控制功能,能综合实现安全、节能、环保及舒适行驶的新一代智能汽车。 智能网联汽车关键技术包括环境感知技术、无线通信技术、智能互联技术、信息融合技术、人机界面技术、信息安全与隐私保护技术等;其系统一般由环境感知层、智能决策层、控制和执行层所构成。 智能网联汽车的功能: (1)交通安全:交通事故率可降低到目前的1%; (2)交通效率:车联网技术可提高道路通行效率10%,CACC系统大规模应用将会进一步提高交通效率; (3)节能减排:协同式交通系统可提高自车燃油经济性20%-30%,高速公路编队行驶可降低油耗10%-15%; (4)产业带动:智能网联汽车产业将会拉动机械、电子、通信、互联网等相关产业快速发展; (5)国防应用:无人驾驶战斗车辆; (6)交通方式的改变:减轻驾驶负担,娱乐、车辆共享,快捷出行。 车联网、智能汽车及智能交通系统的关系: (1)协同式智能车辆控制(智能网联汽车) (2)协同式智能交通管理与信息服务 (3)汽车电商、后服务、智能制造等
二、智能网联汽车、车联网相关政策 2016年7月《推进“互联网+”便捷交通促进智能交通发展的实施方案》规定:加快车联网、船联网建设,在民航、高铁等载运工具及重要交通线路、客运枢纽站点提供高速无线接入互联网的公共服务,扩大网络覆盖面。 2016年11月《关于进一步做好新能源汽车推广应用安全监管工作的通知》规定:自2017 年1月1日起对新生产的全部新能源汽车安装车载终端,通过企业监测平台对整车及动力电池等关键系统运行安全状态进行监测和管理 2017年2月《关于印发“十三五”现代综合交通运输体系发展规划的通知》规定:加快车联网、船联网等建设。在民航、高铁等载运工具及重要交通线路、客运枢纽站点提供高速无线接入互联网公共服务。建设铁路下一代移动通信系统,布局基于下一代互联网和专用短程通信的道路无线通信网。研究规划分配智能交通专用频谱。 2017年7月《国务院关于印发新一代人工智能发展规划的通知》规定:加快布局实时协同人工智能的5G增强技术研发及应用,建设面向空间协同人工智能的高精度导航定位网络,加强智能感知物联网核心技术攻关和关键设施建设,发展支撑智能化的工业互联网、面向无人驾驶的车联网等,研究智能化网络安全架构。 2017年9月,国家发改委透露,已启动国家智能汽车创新发展战略起草工作,将通过制订战略明确未来一个时期我国汽车战略方向,同时提出近期的行动计划,确定路线图和时间表。 2017年12月《国家车联网产业标准体系建设指南(智能网联汽车)》规定:到2020 年,初步建立能够支撑驾驶辅助及低级别自动驾驶的智能网联汽车标准体系。到2025 年,系统形成能够支撑高级别自动驾驶的智能网联汽车标准体系。 2017年12《促进新一代人工智能产业发展三年行动计划(2018-2020年)》,将智能网联汽车作为本次行动计划提出的第一项要大力发展的智能产品,并设定了到2020年建立可靠、安全、实时性强的智能网联汽车智能化平台,形成平台相关标准,支撑高度自动驾驶等目标。 2018年1月《智能汽车创新发展战略》(征求意见稿)规定:到2020 年大城市、高速公路的LTE-V2X 覆盖率达到90%,北斗高精度时空服务实现全覆盖;到2025 年,5G-V2X 基本满足智能汽车发展需要。
车联网引领智能交通进入新时代
车联网引领智能交通进入新发展时代 摘要:2010年上海世博会通用汽车馆展出的“2030年上海车联网智能交通体系”一度令观众 倍感神奇,而近期随着物联网、车联网等技术的发展和应用完善,汽车制造商和智能交通设 备商的联合已经让这个曾经看上去遥不可及的车联网智能交通梦在现实中前进了一大步。而 一系列的车联网智能交通技术理念和产业构想,让人们看到了更为壮观的产业蓝图。 传统的智能交通系统(Intelligent Transportation Systems,ITS)作为解决车辆与道路间矛盾、提高道路通行能力及保障行驶安全的有效手段,在我国已得到广泛研究与应用。北京、上海、广州等大型城市先后建立了智能化交通控制与管理一体化系统,其集成了智能交通灯控制、重要路段监控、动态车辆抓拍、实时路况信息发布等多项功能。其次,具有车辆定位和智能调度功能的智能公交系统也已经在上海的多条公交线路投入使用。再次,不停车收费系统(ETC, Electronic Toll Collection System)在长三角的高速公路中已经得到全面覆盖。纵观上述应用为代表的现有智能交通系统,存在应用范围上的局限,其限于某类车辆或者特定区域车辆,并且较多地关注于交通信息采集和交通综合管理,而对车辆自身安全行驶的辅助作用不大和车载的娱乐办公系统未能起到重要作用。 随着经济、社会的发展,车辆的爆发式增长和无处不在的信息需求将车联网和智能交通紧密的结合起来,基于车联网的智能交通研究正成为世界瞩目的焦点。车辆行驶在高速公路上是车联网在提高行驶安全方面的典型应用,如果在高速公路上实现车联网,前后及相邻车道的车辆信息可通过车辆上的车载单元(On-Board Unit,OBU)通信获得,一旦周边车辆出现紧急状况,驾驶员便可根据提示及时避让,有效减少事故的发生;而通过使用安装在路边的路边单元(Road-Side Unit,RSU),交管部门就可以利用RSU一方面实时采集到车辆更详细的运行情况,提高道路管理的信息化水平,另一方面将路况信息和其他多媒体服务信息实时通报给行驶在指定路段的所有车辆,提高信息发布有效性。可以说,以车联网为核心的广义智能交通系统,具有广阔的发展前景,是未来智能交通的发展方向。 作为“国家中长期科学和技术发展规划纲要”中指定的重点攻关领域,车联网的可以提高智能交通系统服务水平、促进城市信息化系统建设,为发展和建设
网联汽车技术的发展现状趋势
一、智能网联汽车基本内涵 1)概念层面的理解 ①汽车是指传统意义的汽车,包含今天广义上的新能源汽车; ②网联汽车是指在汽车的基础上,彼此能通信的汽车; ③智能网联汽车是指网联汽车基础上,具备智慧(有学习、判断、决策)能力的汽车。 理解: ①汽车还是汽车,这是没有改变的部分; ②智能网联汽车是新时代的汽车,这是变的部分。 ③传统汽车由人驾驶,彼此之间没有“会话”(通信)功能,更没有判断(决策)能力。 2)术语层面的表述 智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置(注:硬件系统),并融合现代通信与网络技术,实现车与X(车、路、人、云等)智能信息交换、共享(注:对外通信系统),具备复杂环境感知、智能决策、协同控制等功能(注:软件系统),可实现安全、高效、舒适、节能行驶,并最终实现替代人来操作的新一代汽车(注:功能)。 理解: ①智能网联汽车由软件和硬件两部分组成, i)硬件细分3个部分:传感器、控制器、执行器等装置; ii)软件:在现代通信与网络技术的支持下,具有环境感知、智能决策、协同控制等功能; ②发展智能网联汽车最终目的是:实现替代人工操作的新一代汽车; ③发展智能网联汽车的基本要求:安全、高效、舒适、节能 二、智能网联汽车概念的位置关系 智能网联汽车、智能汽车与车联网、智能交通等概念间的相互关系,如图 1 所示。智能汽车隶属于智能交通,智能网联汽车是智能交通与车联网的交集。
图1 智能网联汽车是智能交通与车联网的交集 理解: ①智能网联汽车、智能汽车与车联网、智能交通是4个概念,不能混淆; ②智能交通是一个种概念,智能汽车、智能网联汽车是智能交通2个属概念, ③智能交通与车联网彼此之间有交集,这个部分是智能网联汽车。 三、发展智能网联汽车的时代意义 ①智能网联汽车是国际公认的是未来的发展方向; ②智能网联汽车的初级阶段,有助于减少30% 左右的交通事故,交通效率提升10%,油耗与排放分别降低5%; ③智能网联汽车的终极阶段,完全避免交通事故,提升交通效率30% 以上,并最终能把人从枯燥的驾驶任务中解放出来。 一句话,智能网联汽车可以提供更安全、更节能、更环保、更便捷的出行方式。 四、智能网联汽车4个发展阶段及技术特点 1)自主式驾驶辅助阶段及技术特点 自主式驾驶辅助系统是指依靠车载传感系统进行环境感知并对驾驶员进行驾驶操作辅助的系统。 (1)技术特点: 环境感知,运用传感系统技术是主要技术特点。 (2)技术分类: 有预警系统与控制系统两大类。 ①预警系统细分: i)前向碰撞预警(Forward Collision Warning,FCW);ii)车道偏离预警(Lane Departure Warning,LDW);iii)盲区预警(Blind Spot Detection,BSD);iv)驾驶员疲劳预警(Driver Fatigue Warning,DFW);v)全景环视(Top View System,TVS);vi)胎压监测(Tire Pressure Monitoring System,TPMS)等6大系统; ②控制类系统有: i)车道保持系统(Lane Keeping System,LKS);ii)自动泊车辅助(Auto Parking System,APS);iii)自动紧急刹车(Auto Emergency Braking,AEB);iv)自适应巡航(Adaptive Cruise Control,ACC)等4大系统。
探究我国智能网联汽车发展现状
龙源期刊网 https://www.360docs.net/doc/9e11115259.html, 探究我国智能网联汽车发展现状 作者:曹汝浪 来源:《科技资讯》2019年第18期 摘 ;要:众所周知,智能网联为我国当前新能源汽车产业将要重点发展的重点产业。目前我国的智能网联汽车产业发展面临着很多的问题,处于刚刚发展的阶段。对于智能网联汽车的发展,不仅面临着智能化与网联化的困难,还需要克服诸如怎样使得企业能够更好地发展、怎样去完善产业发展的战略缺失、怎样才能使得产业的标准更加健全、怎样使得产业的政策更加完善以及怎样完善测试场地和评价标准等诸多的困难。根据调查表明,为了能够促进我国智能网联汽车产业更好地发展,仅仅依靠企业自身的发展很难做到,在智能网联汽车产业发展的过程中需要通过政府、行业、高校和研究机构对其进行共同合作等,让其取得良好的发展前景。除了共同的合作促进智能网联汽车的发展外,还需要顶层设计来推动产业标准体的建设。 关键词:智能网联 ;汽车 ;困难 ;措施 中图分类号:U495 ; 文献标识码:A ; ; ; ; ; ;文章编号:1672-3791(2019)06(c)-0018-02 随着以互联网、大数据和云计算等技术为代表的新一轮的科技改革兴起,我国的政府提出了“中国制造2015”和“互联网+”等新型的发展方案。我国新一轮的科技改革正在不断发展。智能网联汽车可以提供更安全、更节能、更环保、更快捷的出行方式和全面的解决方案,是国际公认的未来发展方向和关注的焦点。 随着全球气温的上升,许多国家联合采取相应的措施来减少汽车对环境的危害,对燃气的销售情况进行了相应的规定和禁止。荷兰对2025年的燃油提出了禁令,印度、英国、法国也将会在2030—2040年全面地对燃油进行禁止出售,当然我国也会相应地出台有关燃油禁令指令。为了解决全球现在所面临的环境问题,推动智能网联汽车产业的发展成为重要措施之一。同时推动智能网联汽车产业的发展也是我国创新发发展的重要内容之一。我国目前的智能汽车产业还处于发展初期,必然会在发展的路上面临着很多的困难,全面地对我国现在产业的发展状况进行分析,对产业发展的困难和决策仔细地研究,会极大地促进我国智能网联汽车产业的发展。 1 ;智能网联汽车的含义 中国汽车工业协会对智能网联汽车做出了如下的相关定义:智能网联汽车是搭载先进的车载传感器、控制器、执行器等装置结合现代的通信与网络的技术,实现车和人的智能信息交换共享,智能网联汽车具有对复杂环境的感知、智能决策、共同控制和执行等功能,还能够安全、舒适、节能地高效行驶,最终能够代替人来对汽车完成相应的操作。
基于车联网的智能交通安全辅助功能研究
基于车联网的智能交通安全辅助功能研究 摘要:智能交通系统是解决当下交通问题的有效手段,而车联网技术是物联网 在智能交通系统中的典型运用。本文通过基于车联网的智能交通安全辅助系统的 构建,实现了车联网技术在智能交通系统中,尤其是车辆碰撞预警、事故上报及 救援的应用,使智能交通系统的功能更加全面,更加安全、可靠。 关键词:车联网;车辆碰撞预警;事故上报及救援 1车联网概述 车联网是指由车辆运行路线、位置以及速度等信息组成的交互网络,即通过定位系统、 射频识别以及传感器等装置,对车辆状态信息及道路环境信息进行采集,其中的状态信息包 括静态信息、动态信息以及属性信息等;将采集到的车辆信息通过互联网传输到中央处理器;最后通过计算机对信息进行分析和处理,根据不同的交通需求,对车辆的状态进行监管,以 及提供移动互联网应用,进而实现智能交通安全辅助功能,例如车辆碰撞预警、事故上报及 救援等功能。 2车联网架构分析 车联网是以车内网、车际网和车载移动互联网为基础,按照约定的通信协议和数据交互 标准,在车与车、车与路边单元、车与互联网之间进行无线通信和信息交换,以实现智能交 通管理控制、车辆智能化控制和智能动态信息服务的一体化网络,是物联网技术在智能交通 系统领域的延伸。与普通的物联网技术不同,车联网技术主要面向道路交通,为交通管理者 提供决策支持,为车与车之间提供协同控制,为交通参与者提供信息服务。车联网在系统上 具备物联网的物理结构,在功能上可满足智能交通对安全、环保和效率的要求。 具体地,为了通过车联网技术实现智能交通中车辆碰撞预警、事故上报及救援等安全辅 助功能,可构建如下的车联网系统: 2.1车辆信息采集: 通过各车辆终端处的传感器采集相应车辆的运行数据信息,例如速度数据、加速度数据、本车位置数据、运动方向信息等; 通过各车辆终端处的传感器采集相应车辆的事故信息碰撞感应信息、火灾信息、按钮报 警信息等; 实时采集交管部门和救援部门的相关车辆位置信息。 2.2网络拓扑结构: 在城市道路沿途设置网络节点,网络节点用于上述各种车辆信息的收集、处理和上传; 各网络节点均连接至远程服务中心,实现车辆运行数据信息的共享和管理。 图2车辆碰撞预警场景示意图 具体地,在碰撞概率计算时,可采用多种计算方法,例如计算车辆之间的距离、计算车 辆之间的靠近速度、前车是否有刹车/变道操作等,下面分别以车辆之间的距离、前车是否有刹车操作为例进行具体说明: 1)车辆之间的距离:获取本车和本车对应的预设范围内的其它车辆的相对位置数据;根 据该相对位置数据,确定本车与其它车辆的碰撞概率(此处,可事先根据车辆速度建立相对 位置数据与碰撞概率的对应关系);如果碰撞概率大于预设概率阈值,则触发报警操作。 2)前车是否有刹车操作:获取本车和本车对应的预设范围内的其它车辆的相对位置数据;获取本车对应的预设范围内的前方车辆是否有刹车操作;在前方车辆有刹车操作时,根据二 者的相对位置数据,确定本车与前方车辆的碰撞概率(此处,可事先根据车辆速度建立相对 位置数据与碰撞概率的对应关系,相对于前车正常行驶的情况,在前车有刹车动作时,则相 对地,应在较大的相对位置时即有较大的碰撞概率);如果碰撞概率大于预设概率阈值,则 触发报警操作。 3.2事故上报
调研报告智能网联汽车关键技术
智能网联汽车关键技术 调研报告 概况 中国的智能网联汽车发展已上升至国家战略层面,发展定位从原来以车联网的概念体现并作为物联网的重要组成部分,向智能制造、智能网联等智能化集成转移。2015 年工信部关于《中国制造2025》的解读中首次提出了智能网联汽车概念,明确了智能网联汽车的发展目标: 2020年掌握智能辅助驾驶总体技术及各项关键技术,初步建立智能网联汽车自主研发体系及生产配套体系;2025 年掌握自动驾驶总体技术及各项关键技术,建立较完善的智能网联汽车自主研发体系、生产配套体系及产业群,基本完成汽车产业转型升级。同时,提出重点发展基于车联网的车载智能信息服务系统、公交及营运车辆网联化信息管理系统和装备自动驾驶系统的智能网联汽车领域。 国家智能网联技术发展规划 目前,我国主要整车企业纷纷制定了智能网联汽车的战略规划,并通过跨界合作寻求产业融合和商业模式创新发展。上汽与阿里巴巴互联网汽车领域战略合作,以及智能驾驶相关的前瞻技术研发; 一汽“挚途”智能网联汽车技术战略,明确表示将在2025 年实现智能商业服务平台运营; 东风与华为已签署战略合作协议; 长安面向2025 智能网联汽车技术发展的“654”战略,并已和长安、高德、百度开展多方面的战略合作; 北汽与乐视联手打造全新一代互联网智能汽车及汽车生态系统,并创立轻资产品牌等。 我国于2016年10月颁布《节能与新能源汽车技术路线图》。该路线图的总体框架为“1+7”,即一个总报告再加7个报告分会,分别是节能汽车、纯电动和混合动力汽车、燃料电池汽车、智能网联汽车和汽车制造、动力电池、轻量化的技术路线图,如下图所示。
图 1 节能与新能源汽车总体技术路线图 参与编写技术路线图的专家们关于世界汽车技术发展趋势达成的共识包括三方面,即低碳化、信息化、智能化。信息化是指通过移动互联网、V2V、V2X等技术提升汽车的联网水平,从人性的角度而言,通信是人的基本需求,移动互联网普及之后,人几乎24小时挂在网上,自然期待在汽车场景下依然保持在线,享受车载娱乐服务;此外,联网也可使OTA(Over-the-Air)变成提升系统软件性能的常规手段。智能化是指利用大数据与机器智能实现ADAS与无人驾驶技术,解放人类的双手双脚,是人类免于驾车的苦役,每天变向延长人类1~2个小时的寿命,同时也是实现汽车主动安全的终极技术。而信息化与智能化二者的结合,亦可大幅提升道路的通行效率,是建设智慧城市不可缺少的一环。 《节能与新能源汽车路线图》对图2中的7大方向提出了以下量化指标:
2018年中国智能网联汽车道路测试标准体系建设政策汇总分析
2018年中国智能网联汽车道路测试标准体系建设政策汇总 分析 作为汽车产业与物联网、人工智能、大数据等尖端技术和新兴产业跨界融合的产物界融合的产物,智能网联汽车已成为产业变革和国际竞争的重要领域。但是,智能网联汽车的产业化仍面临着技术能网联汽车的产业化仍面临着技术、标准、法律法规等多方面的障碍,迫切需要测试示范区为其产业化提供孵化平台测试示范区为其产业化提供孵化平台。 全国及各地智能网联汽车道路测试政策汇总 近年来,我国智能网联汽车发展明显提速。自2015年我国明确提出加快汽车等行业的智能化改造后,2017年工信部出台《车联网发展创新行动计划》,加快车联网技术研发和标准制定。2018年,工信部加快制定《车联网产业发展行动计划》及《车联网和智能网联汽车发展三年行动计划》,建立涵盖车辆、通信、道路设施等的标准体系。 同时,智能驾驶上路法规也在加紧拟定。2016年9月,重庆出台《重庆市推进基于宽带移动互联网的智能汽车与智慧交通应用示范项目实施方案 (2016-2019)》,确定了自动驾驶汽车上路测试的时间表。2018年3月,上海发布了《上海市智能网联汽车道路测试管理办法(试行)》;3月,重庆发布《重庆市自动驾驶道路测试管理实施细则(试行)》。2018年4月,工信部、公安部、交通部联合颁布了《智能网联汽车道路测试管理规范(试行)》,是我国中央政府出台的第一个规范自动驾驶汽车道路测试的法规文件。
多个城市相继发布智能网联汽车上路测试的有关政策法规,开创了国内开展智能网联汽车路试的先例,使国内各相关企业可以不必远渡重洋进行路试,即解决了企业的迫切需求,也使企业在此方面的成本大大降低。可以预见随着时间推移,将会有更多的城市开放测试环境,使国内各企业能够有充裕的环境开展路试工作。但是,开放路试还仅仅是第一步,今后各地还要根据需求加紧建设测试环境和设施,能够真正构建智能网联汽车的测试需求环境,同时还要完善智能网联汽车相关法规的建设,使智能网联汽车的发展能够有真正政策法规进行规范。 国家级智能网联汽车测试示范区10个 我国目前正在规划或建设的智能网联汽车测试及示范基地可以主要分为两类:一类是由国家相关部委联合地方政府批复,由相关企业或研究机构承担建设的封闭测试场地,目前主要以工信部、交通部为主。自2015年以来,其中由国
(完整版)新能源与智能网联汽车关键技术产业化
新能源与智能网联汽车关键技术产业化 实施方案(2018-2020年) 一、实施背景 (一)产业发展现状 在政府大力扶持和市场快速发展的双重带动下,我国新能源汽车产业快速发展。截止2017年5月,我国新能源汽车保有量超过120万辆,占全球新能源汽车市场比例超过50%。 首先,产品技术水平大幅提升。动力电池产品可靠性、安全性、一致性取得重大突破,高速电机、电机控制器及高功率电力电子等关键技术实现突破,部分关键零部件产品成功进入国际知名整车制造企业配套体系。其次,制造装备及工艺全面升级。企业生产线自动化和智能化水平得到提升,产品生产效率及性价比进一步提高,自主产品配套规模和市场占有率进一步扩大。另外,企业创新能力明显增强。通过引进和培养高级科研人才、完善研发管理体制、强化上下游企业合作,企业协同创新体系不断健全和完善,综合创新能力持续提升。 (二)存在的差距 我国新能源汽车产业整体发展态势良好,但关键技术和产业化水平仍有待进一步突破,产业核心竞争力仍需进一步增强。与国外先进水平相比,我国汽车智能驾驶技术研究整体起步较
晚,研发基础薄弱,车载级环境感知等智能传感器、集成化驾驶辅助系统等技术水平及研发能力落后,面向自动驾驶技术的示范、测试体系处于起步阶段;高性能动力电池及关键制造设备研制、动力电池回收利用水平仍有待提升;新型动力驱动系统集成和控制、功率芯片集成设计和模块封装等方面还明显低于国际水平;燃料电池先进材料研制、系统集成、产业链建设等方面需加强协同攻关;整车轻量化材料、成型工艺及装备水平相对落后,亟需快速提升跨产业、跨学科的汽车轻量化产业水平。 (三)实施必要性 车辆电动化、智能化、网联化是汽车产业新一轮技术革命的必然趋势,世界传统汽车强国和优势整车制造企业均已完成战略布局,新一轮的全球竞争格局已初步形成。 为持续提高我国汽车产业技术水平和核心竞争力,促进我国汽车产业转型升级,我委将继续组织实施新能源与智能网联汽车关键技术产业化实施方案(实施期限为2018-2020年)。 二、主要任务及预期目标 根据我国中长期发展规划目标,结合国外新能源及智能网联汽车产业最新发展形势,围绕智能网联汽车、高性能动力电池、高性能纯电直驱动力系统、燃料电池系统及关键零部件、车身结构和轻量化等方向,择优支持产业前景好、市场需求大、企业能力强的产业化项目,突破一批重大关键核心技术并实现产业化,全面提升我国新能源汽车与智能网联汽车的产业核心竞争力。 (一)智能网联汽车
智能汽车车联网系统分析
智能汽车车联网系统分析 发表时间:2019-05-22T16:16:34.133Z 来源:《基层建设》2019年第5期作者:何晓蕊[导读] 摘要:作为车辆信息化与智能化的重要体系组成部分,车联网系统不仅能够实现车辆的远程控制、远程通讯、故障报警以及电子设备相互连接等诸多功能,更具备性能强、安全性高以及反应速度极快等优点,即使车辆行驶于较为偏远的地带,只要是处于网络信号覆盖下,车联网系统则都能搜索到相应的网络连接信号。 国能新能源汽车有限责任公司天津 300301 摘要:作为车辆信息化与智能化的重要体系组成部分,车联网系统不仅能够实现车辆的远程控制、远程通讯、故障报警以及电子设备相互连接等诸多功能,更具备性能强、安全性高以及反应速度极快等优点,即使车辆行驶于较为偏远的地带,只要是处于网络信号覆盖下,车联网系统则都能搜索到相应的网络连接信号。因此,在当前我国科技信息技术持续进步发展的时代背景下,车联网系统的重要性日益凸显。文中对智能汽车车联网系统进行了分析。 关键词:智能汽车;车联网;系统 1车联网系统概述 车联网系统是车辆智能化和信息化的重要体系之一,该系统提供必要的通信网络,实现车辆的远程通信、远程控制、故障报警、紧急事故报警等安防功能。同时该系统需提供车载WIFI热点,方便用户的其他便携式电子设备连接网络。该系统需提供足够快速、安全的通信网络,并且在全国所有网络信号已覆盖的地区能搜索到网络信号。 2对当前我国汽车车联网发展实际以及难点的分析当前,车联网实现了物联网与智能化汽车的有效连接,二者进行集成,这也是信息化与工业化相结合的重要方面。在新型车联网发展中红,发展了通信、控制以及智能技术的结合,对整个汽车行业,甚至交通运行也意义重大,带动了相关产品的智能化升级,生产方式得以创新,分工更加明确,使得汽车产业突破产品的束缚,更加倾向服务方向,是新型模式的发展。同时,在新一代车联网的发展中红,信息服务得以增强,安全性提高,能效性较强,使得汽车行业实现生态式的发展,立足设计、开发和制造,实现全生命周期的创新。当前,我国的汽车市场庞大,规模扩大。结合不同耳朵主导者,模式各异。首先,是以车厂为主体的模式,其自我进行平台的搭建,提供的是物联网中前装服务。其次,是以行业为主导的模式。主体是使用者或者集成商客户。再次,是电子消费品模式。第四,是移动互联网的模式。随着车联网的不断发展,其技术难点也十分突出,如,缺乏完善的标准和规范,互通性不强,需要不断进行平台和接口的建设。另外,数据安全性需要不断增啊,加强质量体系建设,强化行业可靠性。需要无线通信技术实现不同提升,强化性能,因此,要进行体制的不断创新,加大支持力度,推进车联网技术的不断发展。 3智能汽车车联网系统分析 在整个系统中,车载终端T-BOX是重要的通信设备,实现车内网络与移动网络的有效连接,实现用户在安防、信息获取以及娱乐方面的要求。作为通信的主要通道,其主要的载体是SIM卡,实现与运营商的有效通信,完成其诸多方面的作用和功能。在安防方面,能够实现对相关终端信息的有效接收,以独立终端的主体,实现与BCM的有效互通,主要涉及一些车辆的状态以及实时故障灯,将信号进行传输,达到对车辆的远控控制。另外,借助T-BOX,能够实现对车内新的预先定义,而后发送至相应的数据背景中,也能够实现对信息的接纳,达到及时反馈的目的。娱乐方面的功能主要是借助热点,与网络进行连接,能够进行网络娱乐的共享。 3.1车载终端 车载终端主要负责智能汽车车内网与车联网或者说移动网络之间的通信的重要功能,其次兼顾完成车内的信息收集、安全防护以及车内娱乐等部分功能,作为重要车载通信设备而存在。具体来说,车载终端内置SIM卡可与移动网络运营商通信,从而接通网络通道,进而实现上述娱乐、安防功能。在信息收集方面,车载终端与移动网络之间通信时可以同时将预先定义的车内网信息发送至数据中心,同样的,车载终端也能够直接接收到来自于数据中心所发送的反馈信号或控制信号。在安防功能实现方面,车载终端可以接收其他独立终端所发出的车辆信息、故障信息以及状态信息等,在处理远程控制信号时,也能够直接将其发送至不同相关终端,以实现车辆的远程控制功能。在娱乐方面,由于车载终端内设有WIFI热点,因此,车内人员直接以移动产品进行热点链接就可以进行网络连接。 3.2手机客户端 手机客户端,即手机APP,其功能主要包括用户登录、个人中心、车况显示以及相应的远程功能,通常情况下,为了保障用户信息的安全性,数据中心与手机客户端之间的通信一般采取加密方式,并且,客户端内可以设置相应的地图信息,如此一来,驾驶员就能够直接通过手机或其他设备清晰明确车辆位置的实时信息。 3.3数据中心 作为智能汽车车联网的核心部位,数据中心不仅承担着用户信息、车辆信息中转的重要枢纽作用,更多时候也充当着不同信息存储需求满足载体,其具体功能笔者现总结如下: 3.3.1具备网络通信功能 只有具有网络通信功能,数据中心才能够与用户的手机或其他移动设备进行相互连接,此时才能够实现数据与指令的相互传输与发送。其次,当数据中心社会有网页访问端口时,用户才能够在购买智能汽车后自行注册用户。 3.3.2具备保存用户车辆信息以及用户信息的功能 用户在购买智能汽车并注册用户后,数据中心则可以对用户信息(用户名、用户手机号码、车辆VIN码以及远程控制预设密码等)进行永久保存,且这些信息在任何情况下均不能对外泄露或盗取。另外,数据中还可以通过移动网络为用户显示相应的车辆信息,而用户运用手机客户端对车辆所发送的指令也可以被记录、储存于数据中心,通常情况下,这部分信息的保存期为1年。 3.3.3具备对车辆信息的分析计算功能 当数据中心具备这一功能后,汽车用户的日常驾驶习惯以及机动车近段时间内的油耗情况则可以通过数据中心的分析处理结果适时判断并提示用户是否存在危险驾驶或油耗较高现象,其次,在实际驾车时,所存储的车辆信息处理数据也可以给予用户相应的安全驾驶与经济驾驶建议。 3.3.4具体可拓展第三方应用与接收第三方信息的的功能
浅谈车联网对智能交通的影响
浅谈车联网对智能交通的影响 车联网推动智能交通发展。作为智慧城市的重要组成部分。智能交通可以有效缓解道路拥堵,提高出行效率,并改善由于尾气排放造成的空气污染,受到ZF和民众的高度重视。但是现阶段智能交通还处于初级阶段,能够为民众提供的出行信息服务(TISS)还非常有限,且发布方式还仅局限于网站、广播电台、交通短信息、呼叫中心等传统手段。 表1:现阶段智能交通够为民众提供的出行信息服务还非常有限 日本道路交通情报中心负责进行道路交通情报的收集整理、分析和发布。中心在全国有142个分支机构,与全国所有交通管理机构实现信息在线实时传输。全国主要道路都安装了交通量微波检测器(高速公路每间隔300米一处)和图像监控设备,自动采集交通信息。中心将交通情况收集整理和分析后通过互联网、电话、广播、电视、手机短信以及车载导航系统等媒体向道路用户发布,包括交通堵塞、事故、施工、高速公路入口封闭、停车场车位、大型车车辆外廓尺寸和轴载限制、交通规制及迂回绕路、到达目的地的线路选择、运行距离和时间、异常气象和自然灾害等信息,便于司机选择正确路线,缩短运输时间到达目的降低运输成本。
图1:出现信息通过多种网络媒体向道路用户发布 图2:出现信息服务体现以人为本 TISS需要底层的指挥诱导系统提供实时海量数据;此外“大交通”互联互通需要整合机场、铁路数据以及车管所车辆信息等等。现阶段中国刚刚在发达省份的主要公路上实现设备部署,可以进行信息采集,未来还需要进行信息的汇总及处理,从而形成有效的出行服务建议。随着公路、机场、铁路的不断新建,以及汽车保有量的持续攀升,交通的数据量将越来越大,因此基于互联网模式的采集和发布将成为主流模式。 表2:“大交通”互联互通将产生海量数据
2020年智能网联汽车标准化工作要点
《2020年智能网联汽车标准化工作要点》 2020年是完成智能网联汽车标准体系建设第一阶段目标的收官之年,也是下一阶段工作谋篇布局之年。2020年智能网联汽车标准化工作,将以推动标准体系与产业需求对接协同、与技术发展相互支撑,建立国标、行标、团标协同配套新型标准体系为重点,促进智能网联汽车技术快速发展和应用,充分发挥标准的引领和规范作用,支撑我国汽车产业转型升级和高质量发展。 一、完成标准体系阶段性建设目标 (一)加快完善智能网联汽车标准体系建设。实现《国家车联网产业标准体系建设指南(智能网联汽车)》第一阶段建设目标,形成能够支撑驾驶辅助及低级别自动驾驶的智能网联汽车标准体系;系统开展国家、行业和团体标准需求调查和分析,进一步优化完善智能网联汽车标准体系,编制汽车网联功能与应用标准化路线图,为实现支撑高级别自动驾驶的标准体系第二阶段建设目标提供基础保障。 (二)建立智能网联汽车标准制定及实施评估机制。根据产业发展情况,针对先进驾驶辅助系统、自动驾驶、信息安全、功能安全、汽车网联功能与应用等技术领域特点,有计划、有重点地部署标准研究与制定工作;强化标
准前期预研和关键技术指标验证,提高标准与产业发展的匹配度、粘合度;选择典型企业和产品,开展标准实施效果跟踪评估,实现智能网联汽车标准体系闭环管理与持续完善。 二、推进产品管理和应用示范标准研制(一)加大智能网联汽车产品管理所需标准的有效供给。适应智能网联汽车商品化进程,加快开展自动驾驶系统通用技术要求、信息安全、功能安全等支撑智能网联汽车产品安全性评估的通用类标准制定;推进模拟仿真、封闭场地和实际道路测试评价类系列标准制定,建立智能网联汽车自动驾驶综合评价能力;完成自动驾驶汽车数据记录系统、测试场景、汽车软件升级等关键标准的立项和编制工作;启动智能网联汽车网联性能测试评价、测试设备和工具、试验室能力评价方法等标准研究,促进提升我国智能网联汽车测试服务能力。 (二)发挥标准对产业重点需求及应用示范的支撑作用。面向无人接驳、无人物流等新型产业模式及港口、园区、停车场等特定场景的应用示范需求,完成所需技术标准的立项研究;加快智能网联汽车自动驾驶功能测试相关标准制定,有力支撑智能网联汽车道路测试及应用示范;持续完善智能网联汽车测试评价标准体系,营造高质量的开发、测试及应用环境,助力智能网联汽车技术应
2019年智能汽车(ADAS)和车联网(V2X)的发展路径分析
2019年智能汽车(ADAS)和车联网(V2X)的发展路径分析
写在前面的 (6) 当前是无人驾驶的关键时点 (6) 智能汽车(ADAS)和车联网(V2X)分别是实现无人驾驶的内部和外部要求 (9) ADAS——车内智能的开端 (9) ADAS的原理、构成和分类 (10) 市场空间:全球市场规模众说纷纭,测算国内千亿前装规模 (12) 产业链公司发展现状及推荐标的 (15) 车联网——通向无人驾驶高级阶段的核心技术 (16) 广义车联网包含车内、车际和车云网 (16) 车际网是车联网之魂,其核心在于V2X技术 (16) 车联网市场空间:预计到2025年市场规模接近万亿级别 (19) 车联网标的推荐 (21) 展望:无人驾驶发展之路 (22) 短期关注ADAS渗透率提高带动传感器产业链发展 (23) 中期关注车联网伴生的智慧交通基础设施建设 (30) 长期关注L4级别成熟后共享汽车引领的出行方式颠覆 (38) 问题 (40) 安全问题或成为拖慢自动驾驶发展的重要因素 (41) 多传感器融合成为趋势的同时也将带来算法挑战 (41) 5G商用速度或影响车联网应用进度 (41) 标准法规制定 (42) 无人驾驶产业链标的推荐 (42) 华域汽车——龙头转型,业务结构持续优化 (42) 中国汽研——掌握核心技术,前瞻布局5G以及智能检索检测业务 (42) 德赛西威——国内车机龙头,智能驾驶推进有序 (43) 保隆科技——中国TPMS龙头,汽车电子新贵 (44) 星宇股份——好行业+好格局+好公司,具备全球车灯龙头潜质 (44) 拓普集团——智能刹车系统切入ADAS执行层 (45)
智能交通之车联网解决方案
智能交通之车联网解决方案
神州数码基于RFID的车联网解决方案 神州数码智慧城市解决方案本部 2012年3月
神州数码基于RFID的车联网解决方案简介 一、“车联网”背景 2009年8月7日,温家宝总理在江苏无锡调研时,指出“在物联网发展中,要早一点谋划未来,早一点攻破核心技术”,“在国家重大科技专项中,加快推进物联网的发展”,“尽快建立中国的‘感知中国’中心”。在温总理“感知中国”的要求下,国内各省市政府部门开始认真落实总理的要求,热情拥抱“物联网”。“车联网”是的重要组成部分和应用领域。 神州数码“车联网”解决方案是神州数码智能交通整体解决方案的核心内容之一。通过射频设别(RFID)技术,在车辆安装唯一的电子标签作为“电子车牌照”,通过安装在路桥、场站、社区等场地安装的采集器采集信息,实现车辆监控、指挥和服务。未来“电子车牌”将成为车辆的法定装备,每个车必须安装电子车牌,在卡口、十字路口、重点区域等设置识别基站,与传统车牌配合完成城市内车辆的管理,包括车辆身份的识别、超速等违章管理,重点车辆的运行轨迹跟踪以及相应的环保、收费等服务功能。
二、应用目标 射频识别技术(RFID)是连接智能交通与物联网的桥梁,是一种简单可靠的信息识别和传输手段。交通系统主要组成部分包括:人、车、路、环境、信息等,在这个系统中,物的信息生命形态将得到充分的展示,物将被赋予“智能”而成为“智能交通系统中活跃的、能动的、平等的参与者。在赋予物体信息生命的过程中,RFID技术发挥了关键的作用。它将使车等“物”开口说话,它将为智能交通中的所有物建立起“电子镜像”并能将这一镜像实时、动态、准确地映射到系统的数字化平台上去。提高车辆管理的信息化水平、推进平安城市、数字城市建设,提高人民生活质量,增强公共安全与国防安全,构筑智慧地球。 典型应用包括以下几个方面。 ●交通管理:交通指挥诱导、车辆稽查、运营秩序、拥堵收费、车辆 限行等; ●交通服务:信息整合服务、驾驶安全辅助、动态信息导航、抢修救 援、远程诊断等;
浅析智能网联汽车关键技术及其趋势
浅析智能网联汽车关键技术及其趋势 摘要:简述智能网联汽车概念,分析了目前的关键技术,包括环境感知、智能 决策、控制执行、通信与平台、信息安全,并阐述了其发展趋势。 关键词:智能网联;深度学习;V2X通信;自动驾驶 智能网联汽车是指搭载先进传感器、控制器、执行器等装置,融合现代通信与网络技术,实现车与X(车、路、人等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终替代人操作的新一代汽车。智能网联汽 车可以提供更安全、更节能、更环保、更便捷的出行方式和综合解决方案。 1 智能网联汽车的关键技术 智能网联汽车其技术架构涉及的关键技术主要有以下6种:1)环境感知技术,包括利用 机器视觉的图像识别技术,利用雷达的周边障碍物检测技术,多源信息融合技术,传感器冗 余设计技术等。2)智能决策技术,包括危险事态建模技术,危险预警与控制优先级划分,群 体决策和协同技术,局部轨迹规划,驾驶员多样性影响分析等。3)控制执行技术,包括面向 驱动/制动的纵向运动控制,面向转向的横向运动控制,基于驱动/制动/转向/悬架的底盘一 体化控制,融合车联网通信及车载传感器的多车队列协同和车路协同控制等。4)V2X 通信技术,包括车辆专用通信系统,车间信息共享与协同控制的通信保障机制,移动网络技术,多 模式通信融合技术等。5)云平台与大数据技术,包括云平台架构与数据交互标准,云操作系统,数据高效存储和检索技术,大数据关联分析和深度挖掘技术等。6)信息安全技术,包括 汽车信息安全建模技术,数据存储、传输与应用三维度安全体系,信息安全漏洞应急响应机 制等。 2 智能网联汽车关键技术发展现状 2.1 环境感知技术环境感知系统的任务是利用摄像头、雷达、超声波等主要车载传感器 以及V2X通信系统感知周围环境,通过提取路况信息、检测障碍物,为智能网联汽车提供决 策依据。由于车辆行驶环境复杂,当前感知技术在检测与识别精度方面无法满足自动驾驶发 展需要,深度学习被证明在复杂环境感知方面有巨大优势,在传感器领域,目前涌现了不同 车载传感器融合的方案,用以获取丰富的周边环境信息,高精度地图与定位也是车辆重要的 环境信息来源。 2.2 自主决策技术决策机制应在保证安全的前提下适应尽可能多的工况,进行舒适、节能、高效的正确决策。常用的决策方法有状态机、决策树、深度学习、增强学习等。状态机 是用有向图表示决策机制,具有高可读性,能清楚表达状态间的逻辑关系,但需要人工设计,不易保证状态复杂时的性能。决策树是一种广泛使用的分类器,具有可读的结构,同时可以 通过样本数据的训练来建立,但是有过拟合的倾向,需要广泛的数据训练。效果与状态机类似,在部分工况的自动驾驶上应用。深度学习与增强学习在处理自动驾驶决策方面,能通过 大量的学习实现对复杂工况的决策,并能进行在线的学习优化,但对未知工况的性能不易明确。 2.3 控制执行技术控制系统的任务是控制车辆的速度与行驶方向,使其跟踪规划的速度 曲线与路径。现有自动驾驶多数针对常规工况,较多采用传统的控制方法。性能可靠、计算 效率高,已在主动安全系统中得到应用。现有控制器的工况适应性是一个难点,可根据工况 参数进行控制器参数的适应性设计。在控制领域中,多智能体系统是由多个具有独立自主能 力的智能体,通过一定的信息拓扑结构相互作用而形成的一种动态系统。用多智能体系统方 法来研究车辆队列,可以显著降低油耗、改善交通效率以及提高行车安全性。 2.4 通信与平台技术车载通信的模式,依据通信的覆盖范围可分为车内通信、车际通信 和广域通信。车内通信,从蓝牙技术发展到Wi-Fi技术和以太网通信技术;车际通信,包括 专用的短程通信技术和正在建立标准的车间通信长期演进技术。广域通信,指目前广泛应用 在移动互联网领域的4G等通信方式。通过网联无线通信技术,车载通信系统将更有效地获 得的驾驶员信息、自车的姿态信息和汽车周边的环境数据,进行整合与分析。通信与平台技 术的应用,极大提高了车辆对于交通与环境的感知范围,为基于云控平台的汽车节能技术的