倒车雷达电路

基于MSP430F2274单片机的倒车雷达设计
随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。
以往的倒车雷达设计使用的元器件较多,功能也较简单。本文介绍的基于新型高性能超低功耗单片机MSP430F2274的倒车雷达可以弥补以往产品的不足。
系统总体设计
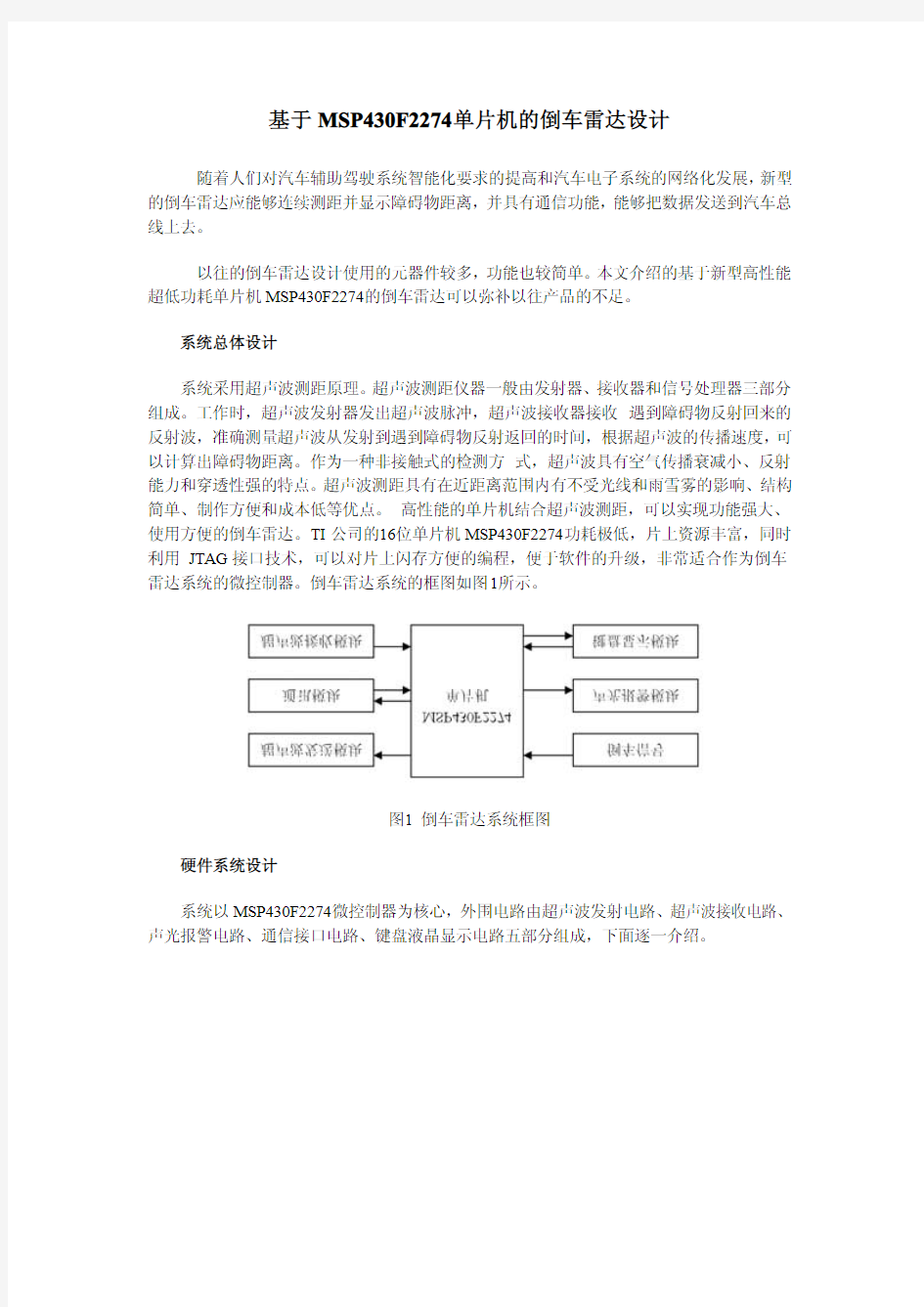
系统采用超声波测距原理。超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点。超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点。高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达。TI公司的16位单片机MSP430F2274功耗极低,片上资源丰富,同时利用JTAG接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器。倒车雷达系统的框图如图1所示。
图1倒车雷达系统框图
硬件系统设计
系统以MSP430F2274微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍。
图2倒车雷达系统主控电路图
系统的主控电路图如图2所示。本系统中选用的MSP430F2274片内有32Kb闪存和1Kb RAM,因此无须外扩存储器。外接的32.768kHz晶振作为CPU关闭状态Basic-Timer的时钟源,同时也作为系统的车载时钟使用。
超声波发送模块电路如图3所示,由超声波产生和发射两部分组成。超声波的产生方法有两种:硬件发生法和软件发生法。常用的硬件发生法常采用如下方案:超声波由CD4011构成的振荡器振荡产生,经升压变换推动超声波换能器而发射出去,振荡器的起振和停振由单片机来控制。本设计采用软件发生法,因为通过软件发生法既可以减少硬件的复杂程度,降低系统的成本,又具有灵活性强、容易实现、稳定性好的优点。本系统利用MSP430F2274单片机的定时器功能来产生稳定的PWM(40Hz)脉冲波,并通过I/O端口P2.3输出到超声波发射部分。在超声波发射电路中CD4049一共包括了6个非门,图3中线路仅使用了3个,为了防止干扰或被静电击穿导致整个CD4049损坏,把没有使用的那一侧的3个非门串起来做接地处理。当控制端输出一系列固定频率脉冲时,在压电陶瓷型超声波发射换能器UCM-40-T上就固定频率的加正电压和反电压,发出大功率的超声波,所得到的波形比其他方式效果更理想。
图3倒车雷达超声波发送模块
超声波接收电路如图4所示。这是本系统设计和调试的一个难点。压电陶瓷型超声波接收器UCM-40-R接收反射的超声波转换为40kHz毫伏级的电压信号,需要经过放大、处理、才能用于触发单片机中断。一方面传感器输出信号微弱,由于反射条件不同,需要放大倍数的范围大约是100~5000,另一方面传感器输出阻抗较大,需要高输入阻抗的多级放大电路,而高输入阻抗容易接收干扰信号。通常采用两种方案:一是采用运算放大器组成多级选频放大电路;二是采用专用的集成前置放大器。第一种方案容易产生自激振荡,要使接收电路达到很好灵敏度和抗干扰效果,电路的调试是较困难的。本系统采用专用的集成电路前置放大器CX20106,它由前置放大器、限幅放大器、带通滤波器、检波器、积分器、整型电路组成。其中前置放大器具有自动增益控制功能,可以保证在超声波传感器接收较远反射信号输出微弱电压时放大器有较高的增益,在近距离输入信号强时放大器不会过载。调节芯片引脚5的外接电阻R3,将它的滤波器的中心频率设置在40kHz,达到了很好的效果。当接收到与滤波器中心频率相符的信号时,其输出引脚7输出一个低电平,而输出引脚7直接接到MSP430F2274的P2.2上,以触发中断。
图4倒车雷达超声波接收模块
图5倒车雷达声光报警电路图
报警模块采用简单的声光报警电路,如图5所示。先设定一个临界值,当车尾与障碍物的距离小于设定的最小距离时,红色指示灯闪亮,绿色指示灯熄灭。单片机向其端口发出PWM脉冲,随着距离的减小,通过控制PWM脉冲的占空比使闪光和蜂鸣的频率加剧,以此来提示驾驶员。
图6倒车雷达通信接口电路图
通信接口电路如图6所示。采用美信的MAX3232芯片,外围电路非常简单,只需要5个0.1μF的电容器。该电路把单片机串口输出信号隔离变换成RS-232信号发送到汽车总线上,同时还可以实现该系统与计算机的通信。
图7倒车雷达键盘显示电路图
键盘和显示电路如图7所示,由键盘和液晶显示两部分组成。其中键盘采用独立式按键,有3个按键,一个设置键、一个上翻键、一个下翻键。可以进行报警值、工作方式、时钟等各个参数的设置。液晶显示电路采用ZJM12864BSBD这款低功耗的点阵图形式LCD,显示格式为128点(列)×64点(行),具有多功能指令,容易使用,可实时的显示时钟、距离和报警提示信息,方便直观。
系统软件设计
软件采用模块化设计,程序由主程序、测距子程序和键盘显示子程序、时钟显示子程序等多个模块组成,调试过程中对其中每个功能模块和子程序逐一调试,在每个子程序都完成指定的功能后,再进行综合调试。系统的软件流程如图8所示。
图8系统软件流程图
超声波发射电路发出超声波的同时计数器开始计数,当遇到障碍物反馈信号到超声波接收器接收,经CX20106接收电路处理后,产生一个低脉冲,该信号传送给单片机产生中断,调用测距子程序,计算出测量距离,调用显示子程序,根据不同的测量数值在液晶上显示距离和报警。当距离大于2m,显示“安全”和测量距离,继续测量;当距离小于1m时,显示“危险”和测量距离,由P1.2位驱动蜂鸣器报警;当距离小于2m且大于1m时,显示“注意”和测量距离。为增强抗干扰能力,系统连续发射超声波测量三次,从中剔除最大最小值,取中间值计算出精确的距离。这样每秒可测约三个数据,仍然可以满足实时性要求。
结语
该倒车雷达采用了高性能的MSP430F2274单片机,并充分利用了其片上资源使得系统功能丰富,使用的外围芯片减少,系统可靠性得到提高。该倒车雷达应用于汽车中,当驾驶员倒车时,从液晶显示屏上一目了然便知道障碍物离车的距离,克服了后视镜小,视野窄的缺点,消除了倒车造成的事故隐患。
倒车雷达分析报告
倒车雷达分析 1 倒车雷达的意义和要求 随着汽车的迅速增加,停车难已经是不争的事实,狭小的停车场地常常令有车一族无所适从,稍不慎,则闯祸,烦事又烦人。虽然每辆车都有后视镜,但不可避免的都存在一个后视盲区。倒车雷达是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的显示告知驾驶员驾驶车辆周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了使用死角和视线模糊的缺陷,提高驾驶的安全性。倒车雷达的发明是迫在眉睫的,是必不可少的设备。 2 总体方案 该设计的应用背景是基于AT89C51的超声信号检测的。因此初步计划实在室内小范围的测试,限定在2.5米左右。单片机(AT89C51)发出短暂的40KHz信号,反射后的超声波经超声波接收器作为系统的输入,锁相环对此型号进行技术判断后,把相应的计算结果送到LED显示电路显示,并进行声光报警[1]。 其发射电路通常分为调谐式和非调谐式。在调谐式电路中有调谐线圈(有时装在探头内),谐振频率有调谐电路的电感、电容决定,发射的超声脉冲频带较窄。在非调谐式电路中没有调谐元件,发射出的超声频率主要由压电晶片的固定参数决定,频带较宽。将一定频率、隔度的交流电压加到发射传感器的固有频率40KHz,使其工作在谐振频率,达到最优的特性。发射电压从理论上说是越高越好,因为对同一支发射传感器而言,电压越高,发射的超声功率就越大,这样能够在接受传感器上接受的回波功率就比较大,对于接受电路的设计就相对简单一些。但是每一支实际的发生传感器有其工作电压的极限值,同时发射电路中的阻尼电阻决定了电路的阻尼情况。通常采用改变阻尼电阻的方法来改变发射强度。 发射部件的点脉冲电压很高,但是由于障碍物回波引起的压电晶片产生的射频电压不过
基于单片机的汽车倒车雷达系统设计
基于单片机的汽车倒车雷达系统设计 摘要 随着社会经济的发展交通运输业日益兴旺,汽车的数量在大副攀升。交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车倒车防撞预警系统势在必行。本设计是利用最常见的超声波测距法来设计的一种基于单片机的汽车倒车雷达系统。 本设计的主要是基于STC89C52单片机利用超声波的特点和优势,将超声波测距系统和STC89C52单片机结合于一体,设计出一种基于STC89C52单片机的汽车倒车雷达系统。该系统采用软、硬件结合的方法,实现了汽车与障碍物之间距离的显示以及危险距离的声光报警等功能。 本设计论文概述了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。在超声波测距系统功能和STC89C52单片运用的基础上,提出了系统的总体构成,对系统各个设计单元的原理进行了介绍,并且对组成各单元硬件电路的主要器件做了详细说明和选择。本设计论文还介绍了系统的软件结构,并通过编程来实现系统功能和要求。 关键词:汽车倒车雷达、STC89C52、超声波、测量距离、显示距离、声光报警
第一章绪论 课题设计的目的和意义 随着汽车的普及,越来越多的家庭拥有了汽车。交通拥挤状况也随之出现,撞车事件也是经常发生,人们在享受汽车带来的乐趣和方便的同时,更加注重的是汽车的安全性,许多“追尾”事故都与车距有着密切的关系。为了解决这个安全问题,设计一种汽车测距防撞报警系统势在必行。 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单。所以超声波测距法是一种非常简单常见的方法,应用在汽车停车的前后左右防撞的近距离测量,以及在汽车倒车防撞报警系统中,超声波作为一种特殊的声波,具有声波传输的基本物理特性—折射,反射,干涉,衍射,散射。超声波测距是利用其反射特性,当车辆后退时,超声波测距传感器利用超声波检测车辆后方的障碍物位置,并利用LED 显示出来,当到达一定距离时,系统能发出报警声,进而提醒驾驶人员,起到安全的左右。 通过本课题的研究,将所学到的知识用在实践中并有所创新和进步。该设计可广泛应用在生活、军事、工业等各个领域,它需要设计者有较好的数电、模电知识,并且有一定的编程能力,综合运用所学的知识实现对超声波发射与接收信号进行控制,通过单片机程序对超声波信号进行相应的分析、计算、处理最后显示在液晶显示屏上。
课程设计(基于单片机的汽车倒车雷达设计)讲解
课程设计说明书 汽车倒车雷达设计 学生姓名XXX 班级机制1001班 学号201021xxxx16 日期2013.07.01—2013.07.12
随着社会经济的发展交通运输业日益兴旺,汽车的数量大幅增长,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时倒车雷达就成了汽车的好助手。倒车雷达是汽车泊车安全辅助装置,能以比较直观的显示告知驾驶员后方障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。超声波测距法是常见的一种距离测距方法,本文介绍的就是利用超声波测距法设计的一种倒车防撞报警系统。控制系统核心部分就是超声波测距仪的研制。 设计通过多种发射接收电路设计方案比较,得出了最佳设计方案,并对系统各个单元的原理进行了介绍,对组成系统电路的芯片进行了介绍,并阐述了它们的工作原理,对超声波传感器的选用经过了仔细的思考,并详细的说明其功能和作用原理。文章介绍了系统系统的软件结构,通过编程来实现系统功能。 关键词:单片机;超声波;测距;传感器
1引言 (2) 1.1背景 (2) 1.2设计的要求和难点 (2) 2总体方案设计 (3) 2.1 系统构成图 (3) 2.2 工作原理 (3) 3硬件设计 (5) 3.1 超声波发射与接收电路 (5) 3.1.1 发射电路 (5) 3.1.2 接收电路 (7) 3.2 ADC0832转换器特点与接线图 (9) 3.3 传感器型号及说明 (12) 4软件设计 (13) 4.1 系统流程图 (13) 4.2 编程程序 (15) 5设计小结 (17) 参考文献 (18)
基于STM32可视化倒车雷达的设计
基于STM32可视化倒车雷达的设计 摘要 为有效地解决驾驶员停车及泊车所面临视野盲区的困扰,提高驾驶安全系数。本文设计了一种基于STM32可视化倒车雷达的预警系统,该系统成本低、经济实用,是一种很人性化的设计。 倒车雷达又叫超声波倒车防撞系统。该系统核心是利用超声波技术测距,驾驶员倒车时系统能自动检测与障碍物的距离,并在LCD 上实时显示出来,当车辆与障碍物距离超出预先设定的范围,系统就会语音提示驾驶员作出正确的判断。实验结果表明:该系统能够及时预警,可降低交通事故的发生。 关键词STM32/超声波测距/LCD显示/语音提示 Design Of Visual Reversing Radar Based On STM32 ABSTRACT In order to effectively solve the driver parking and parking to face the vision of the blind area, and improve driving safety.This paper designs a visual reversing radar warning system based on STM32, the system is low cost, economical and practical, is a very user-friendly design. The reversing radar is also called ultrasonic reversing anti-collsion system. The core of the system is the use of ultrasonic ranging technology, when the driver backs up, the system can automatically detect the distance with obstacles, and display it on LCD in real time, When the distance between the vehicle and the obstacle exceeds the preset range, the system will voice prompt the driver to make a correct judgment. Experimental results show that the system can give early warning, and reduce the occurrence of traffic accidents. KEY WORDS STM32, ultrasonic distance measurement, LCD display, voice prompt 目录 摘要………………………I ABSTRACT ………………………II 1 绪论 (3) 1.1 课题的背景及意义 (3) 1.2 论文研究内容 (3) 2 可视化倒车雷达系统 (4) 2.1 倒车雷达系统构成及原理 (4) 2.2 倒车雷达的发展历程 (4) 3 基于STM32倒车雷达硬件电路设计 (6) 3.1 基于STM32倒车雷达硬件总体结构 (6) 3.2 STM32F103ZET6单片机 (6) 3.2.1 STM32F103ZET6单片机结构 (6) 3.2.2引脚定义及功能 (7) 3.3超声波测距电路模块 (8) 3.3.1 超声波测距功能及原理 (8) 3.3.2 超声波发射电路 (8) 3.3.3 超声波接收电路 (9) 3.4 LCD显示电路 (10) 3.4.1 LCD显示模块引脚及功能 (10) 3.4.2 STM32与LCD显示电路的接口电路 (11) 3.5 报警电路 (11) 3.5.1 蜂鸣器 (11) 3.5.2 STM32与蜂鸣器的接口电路 (12)
浅谈倒车雷达工作原理及常见故障分析
浅谈倒车雷达工作原理及常见故障分析 [摘要]本文简要的分析了超声波倒车雷达的原理,并对常见故障现象进行分析。[关键词]倒车雷达、工作原理,超声波,故障分析 引言 倒车雷达又称泊车辅助系统,一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松,预防事故的发生,保障行车安全. 一、工作原理 倒车雷达由超声波传感器(俗称探头),控制器和显示器(或蜂鸣器)等部分组成.倒车雷达一般采用超声波测距原理,在控制器的控制下由传感器发射超声波信号,当遇到障碍时,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出其他警示信号.从而达到安全泊车的目地.
二、超声波工作原理: 利用超声传感器产生的超声波对车后发射,如在一定范围内碰到物体,就有一反射波返回发射源(超声传感器的表面),主机利用发射波和反射波之间的延迟时间和声波速度就能测得距离。 [超声波信号发射] 当汽车处于倒车状态时,倒车雷达开始启动,控制器控制探头发射超声波信号后,再检测超声波的回波信号.超声波的发射是由控制器发射一串脉冲信号,经放大电路放大后,通过探头发射出去. [超声波的接收] 当超声波发射完成后,控制器立即检测是否有经障碍物反射回来的超声波信号,通过主机上的滤波电路,并计算发射的时间,利用S=T*V/2就可以得出障碍物距离。 三、倒车雷达工作原理框图 MCU通过预定的程序设计,控制相应电子模拟开关驱动发射电路,使超声波传感器工作。超声波回波信号通过专有的接收滤波放大电路进行处理后,由MCU的IO口对其进行检
基于超声波汽车倒车雷达预警系统设计
万方数据
万方数据
万方数据
万方数据
基于超声波汽车倒车雷达预警系统设计 作者:高月华, GAO Yuehua 作者单位:重庆科技学院机械与动力工程学院,重庆,400042 刊名: 压电与声光 英文刊名:PIEZOELECTRICS & ACOUSTOOPTICS 年,卷(期):2011,33(3) 被引用次数:2次 参考文献(5条) 1.吴琼;封维忠;马文杰汽车倒车雷达系统的设计与实现[期刊论文]-现代电子技术 2009(09) 2.王红云基于超声波测距的倒车雷达系统设计[期刊论文]-国外电子元器件 2008(8) 3.王守华基于温度补偿的超声波倒车测距仪的研制[期刊论文]-今日电子 2009(9) 4.朱维杰;于湘珍基于超声波测距的自适应倒车雷达设计[期刊论文]-汽车电器 2009(4) 5.鲁思慧基于微控制器超声波技术的倒车障碍检测系统 2008(08) 本文读者也读过(7条) 1.孙会楠基于单片机的倒车雷达研究[期刊论文]-科技创新导报2011(15) 2.陈学永具有语音提示和数码距离显示的超声波倒车雷达设计[会议论文]-2007 3.常雨芳.黄文聪.Chang Yufang.Huang Wencong基于超声测距的可视倒车雷达预警系统设计[期刊论文]-软件导刊2010,09(12) 4.滕志军基于超声波检测的倒车雷达设计[期刊论文]-今日电子2006(9) 5.张海鹰.高艳丽.张树团.ZHANG Hai-ying.GAO Yan-li.ZHANG Shu-tuan高精度超声倒车雷达的设计[期刊论文]-电子设计工程2011,19(9) 6.周超.ZHOU Chao具有声光提示双功能的倒车防撞系统设计[期刊论文]-传感器与微系统2011,30(5) 7.滕志军.陈莉.张宇帅.Teng Zhijun.Chen Li.Zhang Yushuai一种语音同步提示的倒车雷达的设计[期刊论文]-电子科技2007(11) 引证文献(3条) 1.苏延霞.杨胜兵基于超声测距的智能泊车系统仿真设计[期刊论文]-湖北汽车工业学院学报 2011(4) 2.孙敏.卢浩.赵伟.蒋碧珠.李晶.曹毓涵超声防撞技术的专利状况分析[期刊论文]-电声技术 2012(z1) 3.莫品光.刘艳红基于超声波的倒车防撞报警系统设计[期刊论文]-传感器世界 2012(6) 本文链接:https://www.360docs.net/doc/ab18282021.html,/Periodical_ydysg201103025.aspx
汽车倒车雷达系统的设计与实现
汽车倒车雷达系统的设计与实现 作者:吴琼, 封维忠, 马文杰, WU Qiong, FENG Weizhong, MA Wenjie 作者单位:南京林业大学,信息科学技术学院,江苏,南京,210037 刊名: 现代电子技术 英文刊名:MODERN ELECTRONICS TECHNIQUE 年,卷(期):2009,32(9) 被引用次数:14次 参考文献(11条) 1.朱利娜基于单片机的超声测距倒车雷达的研究[期刊论文]-微计算机信息 2007(23) 2.韩博奇车载倒车雷达系统的研究[学位论文] 2006 3.袁佑新,吴妍,刘苏敏,卢曰万可视汽车倒车雷达预警系统设计[期刊论文]-微计算机信息 2007(5) 4.宋永东,周美丽,BAI Zongwen高精度超声波测距系统设计[期刊论文]-现代电子技术 2008(15) 5.何立民单片机高级教程--应用与没计 2003 6.过柏龄美国国家半导体公司线形集成电路特性与应用手册 1982 7.方佩敏超声波专用集成电路LM1812的原理与应用[期刊论文]-电子世界 1993(12) 8.杨帮文新型集成器件实用电路 2006 9.沙占有智能化集成温度传感器原理与应用 2002 10.裘有斌,张国忠,陈丰伟,高杰基于ISD4004的家庭语音报警系统设计[期刊论文]-单片机与嵌入式系统应用2008(4) 11.吴勉超声波驻车暨倒车雷达系统研制[期刊论文]-现代电子技术 2007(17) 本文读者也读过(9条) 1.王红云.WANG Hong-yun基于超声波测距的倒车雷达系统设计[期刊论文]-国外电子元器件2008,16(8) 2.陈双全.CHEN Shuangquan基于AT89S51单片机倒车雷达的研制[期刊论文]-电脑编程技巧与维护2010(14) 3.李双科.吴记群.LI Shuang-ke.WU Ji-qun基于AT89S51单片机控制的汽车倒车雷达系统设计与实现[期刊论文]-兰州石化职业技术学院学报2005,5(4) 4.胡凤忠.赵广复.Hu Fengzhong.Zhao Guangfu基于AT89C2051单片机的汽车倒车雷达设计[期刊论文]-计算机测量与控制2010,18(5) 5.吴丽君.李德明基于单片机控制的汽车倒车雷达[期刊论文]-中国西部科技2008,7(15) 6.吴琼汽车倒车雷达系统的研究[学位论文]2009 7.陈健俤.乐仁昌.何志杰基于单片机的汽车倒车雷达系统设计[期刊论文]-福建电脑2010,26(10) 8.高旭.朱军.Gao Xu.Zhu Jiu基于AT89S52单片机的超声波倒车雷达系统的设计[期刊论文]-电子技术2010,37(1) 9.宫锦华.李书文汽车倒车雷达的单片机实现方案[期刊论文]-微电子学与计算机2002,19(1) 引证文献(12条) 1.黄娜,李恩光重卡车车外盲区监测系统的方案设计与实现[期刊论文]-汽车实用技术 2015(1) 2.杨成慧,滕帅,罗楠一种汽车倒车防撞系统设计[期刊论文]-西北民族大学学报(自然科学版) 2014(04) 3.高大容,苏玉萍,刘洪涛基于超声波的汽车倒车主动防御系统[期刊论文]-自动化与仪器仪表 2013(02) 4.汪晓红汽车倒车雷达系统的设计[期刊论文]-电子设计工程 2013(17) 5.高月华基于超声波汽车倒车雷达预警系统设计[期刊论文]-压电与声光 2011(03) 6.高美霞,柏建普单片机控制的超声波测距仪汽车倒车系统的设计[期刊论文]-自动化技术与应用 2011(11)
倒车雷达毕业论文
倒车雷达毕业论文 基于单片机的超声波倒车雷达设计 1 绪论 1.1课题背景 随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。而倒车事故给车主带来的许多麻烦,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员后顾之忧,大大降低倒车事故的发生。 超声波倒车雷达全称叫“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和启动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除视野的死角和视线模糊的缺陷,提高驾驶的安全性。倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。通过感应装置发生超声波,然后通过反射回来的超声波判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。只不过由于倒车雷达体积大小及实用性的限制,目前其主要功能仅为判断障碍物与车的距离,并做出提示。 1.2国内外研究现状 一般认为,关于超声波的研究最初起始于1876年F.Galton的气哨实验,这是人类首次有效产生的高频声波。在之后的三十年中,超声波仍然是一个鲜为人知的东西,由
于当时电子技术发展缓慢,对超声波的研究造成了一定程度的影响。在第一次世界大战中,对超声波的研究逐渐受到重视。法国人Langevin使用一种晶体传感器在水下发射和接收相对低频的超声波。他提出的这种方法可以用来检测水中是否存在潜艇并进行水下通信。 1929年,Sokolov首先提出用超声波探查金属物内部缺陷的建议。相隔2年,1931年Mulhauser获准一项关于超声检测方法的德国专利,不过他并未做更多的工作。4年之后,1934年sokolov首次发表了关于在液体槽子里用穿透法作实物试验的结果,他用了各种方法做了实验,用来检测穿过试件的超声能量,其中之一是用简单的光学方法观察液体表面由超声波形成的波纹。德国人Bergrnann在他的论著《ULTRASONIC》中,详细的论述了有关超声波的大量早期资料,该论著一直被认为是该领域的经典之作。 美国的Firestone首次介绍了脉冲回波探伤仪,使超声波检测技术发展到了更重要的阶段。在各种系统中,这是最成功的一种,因为它有最广泛的通用性,其检测结果也最容易解释。这种方法除可用于手工检测外,还可与采用先进技术的自动系统联用,自第一种脉冲回波仪器问世以来,根据相同的原理,有无数种其他仪器得到了发展,并有许多改进和精化。目前,在超声无损检测中,脉冲回波系统仍是使用最为广泛的一种。 八十年代后期,由于计算机技术和高速器件的不断发展,使超声波信号的数字化采集和分析成为可能。目前国内也相继出现了各类数字化超声波测距设备,并已成为超声波检测的发展方向。厦门大学的某位学者研究了一种回波轮廓分析法。该方法在测距中通过两次探测求取回波包络曲线来得到回波的起点,通过这样处理后超声波传播时间的精度得到了很大的提高。另外,也有大量的文献研究采用数字信号处理技术和小波变换理论来提高传输时间的精度。这些处理方法都取得了较好的效果。 目前国内外在超声波检测领域都向着数字化方向发展,数字式超声波测距系统的发展速度很快。国内近几年也相继出现了许多数字式超声波仪器和分析系统。随着测距技术研究的不断深入,对超声测距系统功能要求越来越高,单数码显示的超声测距系统会带来较大的测试误差。进一步要求以后生产的超声测距仪能够具有双显及内带有单板机的微处理功能。随后具有检测,记录,存储,数据处理与分析等多项功能的智能化检测分析仪相继研制成功。超声仪研制呈现一派繁荣景象。其中,煤炭科学研究院研制的2000A型超声分析检测仪,是一种内带微处理器的智能化测量仪器,全部操作都处于微处理器的控制管理之下,所有测量值,处理结果,状态信息都在显像管上显示出来,并可接微型打印机打印。其数字和波形都比较清晰稳定,操作简单,可靠性高,具有断电
汽车倒车雷达电路设计【开题报告】
毕业论文开题报告 电子信息工程 汽车倒车雷达电路设计 一、课题研究意义及现状 汽车已经成为我们生活中不可缺少的一部分,它在给人们带来方便快捷的同时也出现了很多问题。越来越多的汽车使道路变得拥挤,原来不是问题的倒车也逐渐变成了难题。尽管每辆车都有后视镜,但不可避免地都存在一个后视盲区,倒车雷达可以在一定程度上帮助驾驶员扫除视角死角,提高驾驶的安全性。目前市面上的倒车雷达大多采用超声波测距原理, 由安装于车尾保险杠上的发射接收一体化探头发送超声波并接受回波,计算车尾与障碍物之间的距离, 再由显示器显示距离并发出声音警示, 从而使驾驶员倒车时不至于撞上障碍物。 随着科技的日新月异,人们对于车辆的功能及行车安全的期望日益增加。因此,近年来许多先进的安全系统及驾驶辅助系统相继被开发出来。其中倒车辅助系统是驾驶辅助系统中最先受到嘱目的技术,目前己成为高阶新车的标准驾驶辅助标准配备之一。为此, 设计一种较低成本、较高性能的倒车雷达对国内中低端汽车市场很有价值。 当今汽车业的四大主题是:安全、环保、节能和舒适,这也是未来汽车的发展方向。而其中的安全性是设计车型时最关键的因素。安全驾驶中的倒车视线不良一直是困扰驾驶者的难题,能在倒车时知道车后状况绝对是对驾驶者安全保障。作为汽车在日常使用中的辅助配置,倒车雷达已经跃居为人们出行的必备配置之一。 二、课题研究的主要内容和预期目标 论文的内容是基于51单片机的倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距原理和51单片机结合于一体,设计开发报警系统。该系统采用软硬件结合的方法,具有模块化和多用化的特点。在整个设计过程中要熟悉单片机芯片的工作原理以及所使用单片机的各个管脚及其功能。 本系统可以较为准确的完成对汽车尾部3m以内障碍物和突然闯入区域内的行人的自动探测功能,并报警提示死机采取措施,极大提高了汽车倒车时的安全性。 三、课题研究的方法及措施 市场上普遍使用的倒车雷达是利用超声波测距原理, 超声波测距原理一般采用渡越时间法,即: D =ct/2 式中, D 为待测距离,c 为超声波在空气中的传播速度,t 为超声波从发射到接收到回波的时间间隔,可由单片机计脉冲个数的方法实现。c 可视为常数(通常取c =33114m/ s),从而就可计算出超声波探
倒车雷达系统电路图
U4A 74ALS04U4B 74ALS04 U4C 74ALS04 U4D 74ALS04 U4E 74ALS04 LS1 TX(F) R8 1K R9 1K VCC P10 图3-1 超声波发射电路 图3-2 集成电路CX20106A内部结构图 CX20106A的引脚注释: (1)l 脚:超声波信号输入端,该脚的输入阻抗约为40kΩ。 (2)2脚:该脚与GND之间连接RC串联网络,它们是负反馈串联网络的一个组成部分,改变它们的数值能改变前置放大器的增益和频率特性。增大电阻R或减小C,将使负反馈量增大,放大倍数下降,反之则放大倍数增大。 但C的改变会影响到频率特性,一般在实际使用中不必改动,推荐选用参数为R=4.7Ω,C=3.3μF。 (3)3脚:该脚与GND之间连接检波电容,电容量大为平均值检波,瞬间相应灵敏度低;若容量小,则为峰值检波,瞬间相应灵敏度高,但检波输出的脉冲宽度变动大,易造成误动作,推荐参数为3.3μF。 (4)4脚:接地端。 (5)5脚:该脚与电源端VCC接入一个电阻,用以设置带通滤波器的中心频率f0,阻值越大,中心频率越低。例如,取R=200kΩ时,fn≈42kHz,若取R=220kΩ,则中心频率f0≈38KHz。 (6)6脚:该脚与GND之间接入一个积分电容,标准值为330pF,如果该
电容取得太大,会使探测距离变短。 (7) 7脚:遥控命令输出端,它是集电极开路的输出方式,因此该引脚必须 接上一个上拉电阻到电源端,该电阻推荐阻值为22k Ω,没有接收信号时该端输出为高电平,有信号时则会下降。 (8) 8脚: 电源正极,4.5V ~5V 。 LS3 4 图3-3 超声波检测接收电路图
基于51单片机的倒车雷达设计
课程设计报告 (嵌入式系统设计实践) 学院:电气工程与自动化学院 题目:基于51单片机的车倒车雷达设计专业班级:自动化131班 学号:2420132905 学生姓名:吴亚敏 指导老师:罗龙 时间:2015年12月1 日
摘要 倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。 本文介绍了以STC89C51RC单片机为核心的一种低成本、高精度、微型化,并有数字显示和声光报警功能的倒车雷达系统。倒车雷达一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松。倒车雷达的提示方式可分为液晶、语言和声音三种;接收方式有无线传输和有线传输等。本方案采用语音提示的方式,利用STC89C51RC单片机所具备的功能,外接超声波测距模组,即超声波发射模块和超声波接收模块,加上显示模块和语音报警模块,组成一个示例的倒车雷达系统,语音提示报警(0.27m~1.0m)范围内的障碍物,并通过数码管显示与障碍物之间的距离。 关键词:倒车雷达;超声波;单片机STC89C51RC
目录 第一章概述 (1) 1.1设计目的 (1) 1.2设计要求 (1) 1.3 本设计主要内容 (1) 第二章倒车雷达的基本工作原理 (2) 2.1 单片机的发展及其应用 (2) 2.2 超声波测距原理 (2) 2.2.2 超声波测距的基本原理 (2) 2.2.3 超声波测距的设计实现 (5) 2.3 超声波倒车雷达系统工作原理 (5) 2.3.1 超声波倒车雷达的工作原理 (5) 2.3.2 系统原理框图 (6) 2.4 本章小结 (6) 第三章系统硬件设计 (7) 3.1 单片机系统及显示电路 (7) 3.1.1 单片机控制芯片选择 (7) 3.1.2 单片机系统及其外围电路 (9) 3.1.3 显示电路 (10) 3.2 超声波发射电路 (11) 3.3 超声波接收电路 (12) 3.4 语音部分原理图 (13) 3.5 电源电路的设计 (14) 3.6 本章小结 (15)
倒车雷达系统的设计
倒车雷达系统的设计 【摘要】倒车雷达(Car Reversing Aid Systems)的全称是“倒车防撞雷达”, 也称“泊车辅助装置”,是汽车泊车安全辅助装置, 能以声音或者更为直观的显 示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视 所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。本文介绍基于单片机控制的倒车雷达系统,由单片机控制时间计数,计算超声波自发射至接收的往返时间,利用声波在空气中的传输速度,从而得到实测距离。 再根据障碍物与车尾的距离远近情况发出警报。 【关键词】单片机,超声波测距,倒车雷达,超声波换能器。 【前言】随着我国汽车产业的高速发展,尤其是近几年来,我国开始进入私家车时代,汽车的数量逐年增加,造成公路、街道、停车场、车库等越来越拥挤。汽车驾驶员越来越担心车的安全了,其中倒车就是一个典型。本文设计的倒车雷达预警系统主要是针对汽车倒车时人无法目测到车尾与障碍物体的距离而开发设 计的。该系统将单片机技术与超声波的测距技术、传感器技术等相结合,可以测到汽车倒车中,其障碍物与汽车的距离,通过LED 显示屏显示距离,并根据远近发出警报。 一、超声波测距原理 超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见,超声波测距原理与雷达原理是一样的。 测距的公式表示为:L=C×T 式中L 为测量的距离长度;C 为超声波在空气中的传播速度;T 为测量距离传播的时间差(T 为发射到接收时间数值的一半)。 超声波测距主要应用于倒车提醒、建筑工地、工业现场等的距离测量,虽然目前的测距量程上能达到百米,但测量的精度往往只能达到厘米数量级。 由于超声波易于定向发射、方向性好、强度易控制、与被测量物体不需要直接接触的优点,是作为液体高度测量的理想手段。在精密的液位测量中需要达到
汽车倒车雷达设计
汽车倒车雷达设计 来源:电子技术应用作者:胡继胜赵力在现代社会中,随着汽车的增多和停车位日趋紧X,泊车成为很多车主头痛的问题,这时倒车雷达就成了汽车的好助手。倒车雷达是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。本文以ATmega16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。系统电路设计合理,工作稳定,性能良好,精度高,实时检测速度快,在未来市场上将有一定的实用价值。 1 超声波测距原理 超声测距的原理较简单,一般采用渡越时间法,将超声传感器安装在汽车尾部,则障碍物距车尾的垂直距离为: 为了提高测距精度,本系统通过温度补偿的方法对传播速度加以校正。因此只要测量超声发射到超声返回的时间间隔△t及环境温度T,然后根据式(1)、式(2)即可计算出距离S。
2 系统硬件设计 本系统采用ATmega16 AVR为控制核心,外围电路由超声波发射电路、超声波接收电路、温度采集模块、声光报警电路、液晶显示电路、接口电路及电源电路等部分组成。系统框图如图1所示。 2.1 核心控制模块 Atmega16是Atmel公司近几年才推向市场的新一代高性能、低功耗、高集成化的8位CMOS微控制器。由于其先进的指令集以及单时钟周期指令执行时间,加上片内32 个通用工作寄存器都直接与算术逻辑单元(ALU) 相连接,使得一条指令可以在一个时钟周期内同时访问两个独立的寄存器,大大提高了代码效率,运行速度比AT89C51高出10倍。用于边界扫描的JTAG 接口,可以对片上16 KB闪存Flash在线编程和调试,非常方便软件的升级。内部集成了较大容量的存储器和丰富强大的硬件接口电路,如定时/计数器、实时时钟、快速PWM通道、A/D 转换器、I2C的串行接口、可编程的串行USART接口、SPI串
倒车雷达概述-文献综述
倒车雷达概述 1引言 自从1886年2月9日卡尔?本茨发明了人类第一辆汽车,至今世界汽车工业经过了近122年的发展,当代汽车已经非常成熟和普遍了。汽车已经渗透于国防建设、国民经济以及人类生活的各个领域之中,成为人类生存必不可少的、最主要的交通工具,为人类生存和社会的发展与进步起到了至关重要的作用。当今,汽车已经成为人们生活中不可缺少的一部分,它给人们带来方便快捷的同时,也出现了许多问题。如越来越多的汽车使道路上有效的使用空间越来越小,新手也越来越多,由此引起的剐蹭事件也越来越多,由此引起的纠纷也在不断地增加。原来不是问题的倒车也逐渐变成了问题。尽管每辆车都有后视镜,但不可避免地都存在一个后视盲区,倒车雷达则可以在一定程度上帮助驾驶员扫除视角死角和视线模糊的缺陷,提高驾驶的安全性,减少剐蹭事件。因此,提出了基于超声波测距的汽车用倒车雷达的设计。 2倒车雷达的发展 倒车雷达(Car Reversing System)全称“倒车防撞雷达”,又称“泊车辅助装置”,它是汽车泊车或者倒车时的安全辅助装置。它能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车、倒车和启动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视角死角和视线模糊的缺陷,提高驾驶的安全性。 经过几年的发展,倒车雷达系统已经过了数代的技术改良,不管从结构外观上,还是从性能价格上,这几代产品都各有特点,目前使用较多的是数码显示、荧屏显示和魔幻镜倒车雷达这3种。倒车雷达真正开始于轰鸣器,也就是第一代倒车雷达。我想很多人都不会忘记“倒车请注意!”这句话,因为现在多数普通车还在使用它。第二代则是采用数码波段显示,可显示后障碍物离车体距离的数码波段显示倒车雷达。第三代的液晶荧屏显示较以前有了一个质的飞跃。紧接着的四代魔幻镜倒车雷达和五代整合影音 系统更是结合了前几代产品的优点,在原有倒车雷达的基础上增加了很多功能。3主要技术介绍 距离是在不同的场合和控制中需要检测的一个参数。所以,测距就成为数据采集中要解决的一个问题。尽管测距有多种方式,比如激光测距、微波测距、红外测距和
毕业设计--汽车倒车雷达系统的设计
毕业设计--汽车倒车雷达系统的设计汽车倒车雷达系统的设计与实现引言 随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有了私家车。在享受汽车给人们带来便利的同时,由于倒车而产生的问题也日益突出。据初步调查统计,15,的汽车事故是由汽车倒车“后视”不良造成的。早期的倒车防撞仪可以测试车后一定距离范围的障碍物从而发出警报,后来发展到根据距离分段报警。随着人们对汽车驾驶辅助系统易用性要求的提高,对汽车倒车雷达的要求也越来越高。本文设计的基于单片机AT89C51的倒车雷达,采用美国DAL-LAS半导体公司生产的DS18B20单总线型数字温度传感器进行温度补偿提高了测距精度,采用OC-MJ12232C_3液晶显示模块对车距进行实时显示和ISD4004语音芯片实现了倒车雷达语音报警的功能,并可以根据距离的不同做出不同的语音提示。由于采用了超声波专用集成电路芯片LM1812,有效地提高了系统的可靠性和稳定性。 1 超声波测距原理 超声传感器是一种将其他形式的能转变为所需频率的超声能或是把超声能转变为同频率的其他形式的能的器件。超声波测距原理是利用单片机在超声波传感器发射超声波的同时单片机的T0计数器开始计数,当检测到回波信号后单片机的T0计数器停止计数。测得的时间和声速相乘就可以得到超声波往返过程中走过的路程,所以所测距离S为声波传输距离的一半: S=Ct,2 式中:S为超声波发射点与被测障碍物之间的距离;C为声波在介质中的传输速率;t为超声波发射到超声波返回的时间间隔。声波在空气中传输速率为: 式中:T为绝对温度;C0=331(45 m,s。
采用单片机脉冲计数的方法,可精确测出t的值。假设单片机的机器周期为T 机,则有t=NT机,则测得的距离为: 2 系统硬件电路设计 2(1 系统结构 系统框图如图1所示。该系统由单片机控制电路、超声波发射与接收电路、温度补偿电路、LCD显示电路以及语音报警电路等几部分组成。单片机AT89C51是整个系统的核心部件,协调各部分电路的工作。单片机在超声波信号发射的同时开始计时,超声波信号在空气中传播遇到障碍物后发生反射,反射的回波信号经过处理后输入到单片机的INTO端产生中断,计数器停止计数。通过计数器测得的脉冲数可得到超声波信号往返所需要的时间,从而达到测距的目的。超声波探头选用TCF40-25TR1型收发一体式超声波传感器,谐振频率为40 kHz;超声发射与接收电路采用LM1812专业集成电路,不仅外围元件较少,电路简单,而且有更好的稳定性及可靠性;温度补偿电路采用一线制数字温度传感器DS18B20,利用声速和温度之间的关系对声速进行校正,从而消除温度对声速的影响;语音报警电路采用 ISD4004,可实现汽车倒车过程中的语音报警。 2(2 单片机控制电路 系统控制部分的核心是ATMEL公司生产的AT89C51。AT89C51采用40引脚的双列直插式封装(DIP)形式,内部由CPU,4 KB的ROM,256 B的RAM,2个16位的定时,
基于超声波测距的汽车倒车雷达系统的设计
摘要 本文的内容是基于超声波测距的汽车倒车雷达系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和STC89C52RC单片机结合于一体,设计出一种基于STC89C52RC单片机的汽车倒车雷达系统。本系统采用软硬件结合的方法,包括电源模块、单片机及显示模块、报警模块、超声波发射与接收模块,具有模块化和多功能化的特点。该设计的原理是超声波发射器发射一连串超声波,遇到障碍物后反射回来,由超声波接收器接收,只要能计算出超声波从发射到接收的时间,就可以通过计算子程序得出汽车与障碍物的距离,当距离小于报警距离时,发出相应的声光报警。 论文概述了汽车倒车雷达系统的发展及基本原理,阐述了超声波传感器的原理及特性。对于系统的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统的总体构成。通过多种设计方案比较,得出了最佳设计方案,并对系统各个设计单元的原理进行了介绍。对组成各系统电路的芯片进行了介绍,并阐述了它们的工作原理。论文介绍了系统的软件结构,通过编程来实现系统功能。 关键词:汽车倒车雷达系统;STC89C52RC;超声波测距
AUTOMOBILE-REVERSING RADAR SYSTEM Abstract The paper is based on the ultrasonic distance reversing collision avoidance system design, mainly using ultrasound features and advantages, ultrasound ranging system and the integration with the integration STC89C52RC monolithic integrated circuit,including power supply module, SCM and display module, alarm module, ultrasonic transmitting and receiving modules, STC89C52RC monolithic integrated circuit based on the design of a reverse collision avoidance warning systems.The design principle of ultrasonic launcher is a series of ultrasonic, encounter obstacles reflected, by the ultrasonic receiver, as long as you can calculate the ultrasonic from transmitting to receiving time, calculation and program can be used cars and obstacle distance, when the distance is less than the alarm distance, sends out the corresponding sound and light alarm. The paper outlines the development and the basic principles of ultrasound tests on the principles and characteristics of ultrasound sensors. Some of the main parameters for the system were discussed, and introducing ultrasonic ranging system functions basic, the overall composition of the system. Through multiple design comparison, the best designed program drawn, and various system design modules principles introduced. On the composition of the system circuit chip introduced and elaborated the principles of their work. Papers introduced system software architecture, through programming to achieve system function. Keywords: Automobile-reversing radar system ;STC89C52RC; Ultrasonic ranging