基于数学形态学的行波信号消噪滤波方法
基于数学形态学的行波信号消噪滤波方法
荣雅君,袁计委,王 伟,孙玉恒
(燕山大学河北省秦皇岛市 066004)
摘 要:数学形态学是一种非线性信号处理和分析工具,对电力系统信号的分析完全在时域中进行,且幅值不偏移和相位不衰减,形态学滤波器能有效地滤除各种噪声且能保留原信号的全局和局部特征的优点,很多性质优于小波分析理论。MATLAB仿真结果表明数学形态滤波在滤除脉冲干扰和白噪声方面具有良好的消噪能力。
关键词:行波;数学形态学;消噪;
0 引言
输电线路是电力系统的命脉,由于输电线路故障造成的停电事故,不仅影响人们的生产生活,而且严重危及电力系统的安全、稳定运行。因此准确、可靠的故障测距格外重要。行波故障测距由于其测距原理简单近来得到了较为广泛的研究和应用,并且形成了多种测距类型。然而无论哪种行波故障测距方法都需要在线路的端点处采集故障点发出的行波信号,然后再在采集的信号中寻找奇异点(行波波头),以确定行波到达时间,从而达到故障定位的目的[1]。由于线路中的各点参数不均匀,采集信号过程中硬件受到外界干扰等不可预测的原因,行波信号中必然含有大量的噪声,这对行波波头的捕捉带来严重的影响。因此,好的滤波是行波故障定位成功的关键。
以往对于行波的消噪主要是小波变换技术,由于用小波消除脉冲噪声必须设计计算量相当大的滤波器[2],所以在滤除脉冲噪声的情况下不适用。数学形态学是近年来提出的一种从图像处理演变而来的新方法,它利用图像处理理论提取信号的主要特征,而不改变其大体形状、实时性强,消噪效果好。本文利用数学形态学的方法滤除行波的各种噪声,取得良好效果。
1数学形态学及其基本运算
数学形态学(MM)是1964年由法国G.Matheron和J. Serra在积分几何研究成果的基础上创立的。主要优点是计算简单和并行快速,一般只包含布尔运算、加减法运算而不需要做乘法,它的基本思想是利用一个称作结构元素的“探针”在信号中的不断移动来考察信号各个部分之间的关系,并提取信号的主要特征[4]。利用数学形态学构成低通滤波器,即使原始信号伴随较强的噪声、甚至发生了严重的畸变,其基本形状仍可被识别及重构。
形态变换一般分为二值形态变换和多值形态变换,多值形态变换也称灰度变换。由于在电力系统信号分析中一般只涉及一维信号,这里只限于介绍一维离散情况下的多值形态变换,包括腐蚀、膨胀、形态开和形态闭。
1.1腐蚀和膨胀
设f(n)和g(n)分别为定义在F={0,1,…,N-1}和G= {0,1,…,M-1}上的离散函数,且N≥M。这里,f(n)为输入序列,g(n)为结构元素,N,M分别为其长度,则f(n)关于g(n)的腐蚀(erosion)和膨胀(dilation)分别定义为[5]:
()()min{()()}
()()max{()(
f g n f n m g m
)}
f g n f n m g m
Θ=+?
⊕=++
(1)
其中,n= 0,1,…,N-M;m= 0,1,…,M-1。
腐蚀和膨胀是最基本的形态变换,腐蚀变换是一种收缩变换,这种变换使目标肢体收缩、孔洞扩张。作为对偶,不难理解膨胀变换是一个扩张过程,这种变换使目标肢体扩张、孔洞收缩。
用于电力系统消噪时,采样后经过A/D转换的信号即为f(n)。M为结构函数的长度,其取值与采样率和希望滤除的脉冲噪声宽度及白噪声特性有关。
1.2开运算和闭运算
腐蚀和膨胀是不可逆运算,先膨胀后腐蚀与先腐蚀后膨胀均不能使目标还原,而是产生两种新的形态变换。先腐蚀后膨胀称为开运算(Opening),先膨胀后腐蚀是闭运算(Closing)。这两种运算的结果通常不同。序列f(n)关于g(n)的开运算和闭运算分别定义为:
f g f g g
f g f g g
=Θ⊕
?=⊕Θ
o
(2)
开闭运算均具有低通特性,其组合可用作形态学滤波。在实际应用中,对于电力系统这样的
一维信号,开运算使目标轮廓光滑,并去掉毛刺和孤立点,它可以抑制信号中的峰值(正脉冲)噪声;闭运算则填平了小沟,弥合了孔洞和裂缝,由此可以滤除信号中的低谷(负脉冲)噪声。 2故障行波的提取
如果把行波从故障点指向线路两端的传播方向规定为正方向,则行波就可分正向行波和反向行波。正向行波和反向行波的提取对故障暂态分量和行波测距的研究具有重要意义,也是滤波的前提。
由于篇幅原因,本文只对行波提取的方法做一下大体介绍。行波提取的步骤如下:
(1)提取三相电压和电流的暂态量u 和i 。 (2)将三相电压、电流的暂态量u 和i 进行克拉克相模变换,就会得到电压、电流的模量值u m 和i m 。
时域下的相模变换和反变换的关系式为[6]:
(3) (0)(1)(2)1(0)(1)(2)[,,][,,]
[,,][,,]T T m m m a b c T
T a b c
m m m i i i S i i i i i i S i i i ??=??=??克拉克变换矩阵为:
111122211201216111303S S ???????=?=????
???????;?
???? (3)计算电压1模正向行波u f 1和反向行波
u r 1,其他模量行波计算类似,不再一一叙述,计算过程如下:
1111
(*2
f m m c u u i Z =
+1)m (4) 1111
(*2
r m m c u u i Z =
?1)m (5) 其中,u m 1和i m 1分别表示u m 和i m 的1
模分量,
1cm Z =1m ,L 和分别表示每公里输电线路的正序电感和正序电容。
1m C 将上述算法通过MATLAB 语言编程实现,就可以求出电压1模量正向行波和反向行波的波形,本文只对正向行波波形进行仿真研究。
3形态学的行波信号消噪滤波方法
形态开闭运算和形态闭开运算可以消除尖峰,填补缝隙,可以用于去噪。但是由于形态开闭运算使信号的平均值变大,而形态闭开运算使信号的平均值变小,实际滤波器的应用,一般都
是以形态开-闭、形态闭-开运算的组合形式出现。基于形态学开、闭运算可以构建3种滤波算
法:交替滤波器、混合滤波器、交替混合滤波器。
交替滤波器
[()()]()()()[()()]()()()
f oc
g n f g g n f co g n f g g n =?=?o o (6)
混合滤波器
([()()]()2
)()
f g f g n f hf g n +?=o (7)
交替混合滤波器 [()()()()]()[()()]()2
f oc
g f co g n f ahf g n +=
(8)
式(6)~(8)中,‘oc ’为先开后闭的交替滤波运算;‘co ’为先闭后开的交替滤波运算;‘hf ’为混合滤波运算;‘ah ’为交替混合滤波运算[7]。
通常交替滤波器的输出会向下(或向上)偏移,这是因为开(闭)运算的输出信号总是位于原信号下(上)方的缘故。为解决信号输出的单向偏移问题,一般选用混合滤波器或交替混合滤波器综合考虑以上两点,在下文中噪声进行滤波处理与分析时,主要采用交替混合滤波器。
形态滤波器的性能不仅取决于形态变换的类型,而且还取决于结构元素的形状和长度。经过大量的仿真证明,对于电力信号中常见的白噪声,选用比较平滑变化的半圆形结构元素,能够起到很好的噪声抑制作用。对结构元素长度的选取也有一定的要求,若结构元素长度过小,则不能起到很好的去噪效果,若结构元素的长度过大,有会破坏信号的结构,使信号的特征被破坏。本文分别对行波信号白噪声和脉冲噪声进行滤除。
4仿真算例
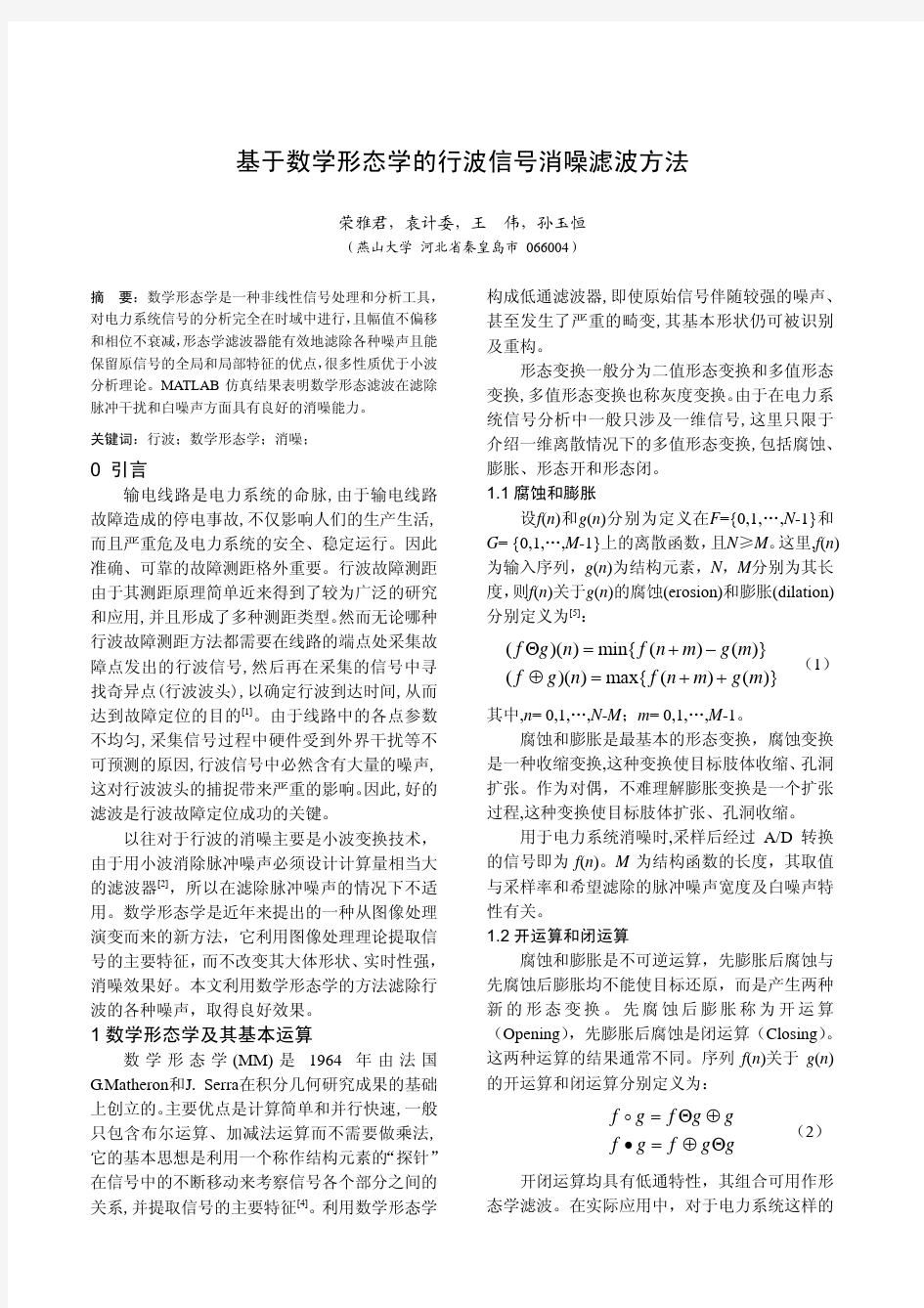
为了验证算法并比较仿真结果,采用故障行波波形,故障系统仿真模型如图1所示,利用MATLAB/SIMULINK 搭建一个仿真模型,针对脉冲干扰和白噪声干扰进行形态消噪算法的分析。以验证该本方法的有效性。
图1 系统仿真图
本文对以上模型进行三相短路故障仿真,部
分参数如下:线路长度为100km,相电压有效值为25e3V,A相相角为0°,频率为60Hz,仿真起止时间分别为0s和0.1s,故障起止时间为0.01s 和0.04s,仿真完成后可在示波器中观察到的波形如图2和图3所示,由故障相电流、电压特征可得仿真波形是正确的。
图2三相短路故障电流波形
图3三相短路故障电压波形
通过仿真后电流、电压的数据可以提取到电压1模的行波,如图4所示。
图4 电压1模正向行波
为了验证消噪方法的有效性,本文对提取的行波信号分别加入脉冲噪声和白噪声,然后通过本文方法消去噪声,仿真结果如图5所示。
图5 形态学去噪结果
从仿真结果可以看出,通过数学形态学的消噪方法,不但可以很好的消除白噪声的干扰,而且还能消除脉冲噪声,为行波的后续分析创造了条件。
4结论
针对行波信号中存在的白噪声以及脉冲噪声干扰,通过数学形态学的滤波消噪方法消去噪声取得良好效果。数学形态学的计算量仅涉及加减和比较大小,和小波变换相比,有更快的计算速度,仿真结果表明,算法简单可靠。
参考文献
[1] 曾喜闻,伍亚萍。基于小波变换的行波信号的去噪滤波[J].电力
科学与工程,2004,31(2):31-33.
[2] 岳蔚,刘沛。基于数学形态学消噪的电能质量扰动检测方法[J]。
电力系统自动化。2002。26(17):13-17.
[3] 王丽霞,何正友,赵静,张海平。小波变换和数学形态学在电力
扰动信号消噪中的应用[J]。电力系统保护与控制。36(24):30-35.[4] 唐常青,吕宏伯,黄铮,等.数学形态学方法及其应用[M].北
京:科学出版社,1990.
[5] 崔屹.图像处理与分析-数学形态学方法及应用[M].北京:科学出
版社,2000.
[6] 宋国兵,李森,康小宁,等.一种新相模变换矩阵[J].中电力系
统自动化,2007,31(14):57-60.
[7] 陈平,李庆民。基于数学形态学的数字滤波器设计与分析[M].中
国电机工程学报,2005,25(11):. 60-65.
作者简介:
荣雅君(1957-),女,吉林省双辽县人,汉族,教授,主要研究方向为电力系统继电保护。
袁计委(1984-),男,河北衡水人,汉族,硕士研究生,主要研究方向为电力系统继电保护。Email:yuanjiwei.1984@https://www.360docs.net/doc/ad2333110.html,。
数学形态学的基本运算
第二章数学形态学的基本运算 2.1二值腐蚀和膨胀 二值图象是指那些灰度只取两个可能值的图象,这两个灰度值通常取为0和1。习惯上认为取值1的点对应于景物中的点,取值为0的点构成背景。这类图象的集合表示是直接的。考虑所有1值点的集合(即物体)X,则X与图象是一一对应的。我们感兴趣的也恰恰是X集合的性质。 如何对集合X进行分析呢?数学形态学认为,所谓分析,即是对集合进行变换以突出所需要的信息。其采用的是主观“探针”与客观物体相互作用的方法。“探针”也是一个集合,它由我们根据分析的目的来确定。术语上,这个“探针”称为结构元素。选取的结构元素大小及形状不同都会影响图象处理的结果。剩下的问题就是如何选取适当的结构元素以及如何利用结构元素对物体集合进行变换。为此,数学形态学定义了两个最基本的运算,称为腐蚀和膨胀即1。 2.1 .1二值腐蚀运算 腐蚀是表示用某种“探针”(即某种形状的基元或结构元素)对一个图象进行探测,以便找出图象内部可以放下该基元的区域。它是一种消除边界点,使边界向内部收缩的过程。可以用来消除小且无意义的物体。腐蚀的实现同样是基于填充结构元素的概念。利用结构元素填充的过程,取决于一个基本的欧氏空间概念—平移。我们用记号A二表示一个集合A沿矢量x平移了一段距离。即: 集合A被B腐蚀,表示为AΘB,其定义为: 其中A称为输入图象,B称为结构元素。AΘB由将B平移x仍包含在A内的所有点x组成。如果将B看作模板,那么,AΘB则由在将模板平移的过程中,所有可以填入A内部的模板的原点组成。根据原点与结构元素的位置关系,腐蚀后的图象大概可以分为两类: (1)如果原点在结构元素的内部,则腐蚀后的图象为输入图象的子集,如图2.1所示。 (2)如果原点在结构元素的外部,那么,腐蚀后的图象则可能不在输入图象的内部,如图2.2所示。 图2.1腐蚀类似于收缩
消除信号反射的匹配方式介绍
消除信号反射的匹配方式介绍 2008-03-20 12:33 (作者:上海延清电子) 在高速PCB设计中,信号的反射将给PCB的设计质量带来很大的负面影响,而要减轻反射信号的负面影响,有三种方式: 1),降低系统频率从而加大信号的上升与下降时间,使信号在加到传输线上前,前一个信号的反射达到稳定; 2),缩短PCB走线长度使反射在最短时间内达到稳定; 3),采用阻抗匹配方案消除反射; 在高速系统设计中,第1种是不可能的,而第2种也是不实际的,通常要缩短PCB布线长度,可能需要增加布线层数、增加过孔数,从而得不偿失,那么第3种是最好的方法,常用的阻匹配方式有以下几种: 1.源端串联匹配 源端串联匹配就是在输出BUFFER上串接一个电阻,使BUFFER的输出阻抗与传输线阻抗一致;此电阻在PCB设计时应尽量靠近输出BUFFER放置,常用的值为:33殴姆。 对于TTL或CMOS驱动,信号在逻辑高及低状态时均具有不同的输出阻抗,而一些负载器件可能具有不同的输入输出阻抗,不能简单的得知,所以在使用串联端接匹配时,在具有输入输出阻抗不一致的条件下,可能不是最佳的选择;在布线终端上存在集总线型负载或单一元件时,串联匹配是最佳的选择; 串联电阻的大小由下式决定: R=ZO-R0 ZO--传输线阻抗R0--BUFFER输出阻抗 串联匹配的优点:提供较慢的上升时间,减少反系量,产生更小的EMI,从而降低过冲,增加信号的传输质量; 串联匹配的缺点:当TTL/CMOS出现在同一网络上时,在驱动分布负载时,通常不能使用串联匹配方式。
2.终端并联匹配 由在走线路径上的某一端连接单个电阻构成,这个电阻的阻值必须等于传输线所要求的电阻值,电阻的另一端接电源或地;简单的并联匹配很少用于CMOS与TTL设计中; 并联匹配的优点:可用于分布负载,并能够全部吸收传输波以消除反射; 并联匹配的缺点:需额外增加电路的功耗,会降低噪声容限。 3.戴维南匹配 Vref=R2/(R1+R2)·V Vref--输入负载所要求的电压 V--电压源R1---上拉电阻R2--下拉电阻 当R1=R2时,对高低逻辑的驱动要求均是相同的,对有些逻辑系列可能不能接受; 当R1>R2时,逻辑低对电流的要求比逻辑高大,这种情况对TTL与COMS器件是不能工作的;当R1 基于数学形态学的图像噪声处理 摘要 本文首先介绍了数学形态学的发展简史及其现状,紧接着详细的阐述了数学形态学在图像处理和分析中的理论基础。并从二值数学形态 学出发着重研究了数学形态学的膨胀、腐蚀、开运算、闭运算等各种 运算和性质,然后根据已有的运算,接着引入了形态滤波器设计、形态学图像处理的实用算法。由于在图像的获取中存在各种可能的噪声,比 如高斯噪声、瑞利噪声、伽马噪声、指数噪声、均匀噪声以及椒盐等 噪声,由于这些噪声的普遍存在,因此,利用数学形态学的腐蚀、膨胀、开启、闭合设计出了一种比较理想的(闭和开)形态学滤波器,并且用MATLAB语言编写程序,反复的使用这种开闭、闭开来处理图像中存在的噪声,其效果比较满意。 关键词:数学形态学图像处理腐蚀膨胀滤波Studies on Mathematical Morphology for Image Processing ABSTRACT In this paper ,we first introduced the brief history and development of mathematical morphology some general theory of mathematical morphology analysis and many experiment results are https://www.360docs.net/doc/ad2333110.html,ter ,from the aspect of morphology of dual value, special emphasis on various operations and properties including dilation, erosion,open operation and close operation etc.In addition, morphology analysis method of the dual value image is also discussed and the practical and improved operations of the morphological image processing such as electric filter design, marginal pattern testing are introduced. As the image of the acquisition in the range of possible noise, such as Gaussian noise, Rayleigh noise, Gamma noise, Uniform noise Salt and Pepper noise and so on. As the prevalence of such noise, so using mathematical morphology of erosion,dilation, opening, closing designed a more ideal (open and closed morphological filter, And repeated to use opening and closing, closing and opening handle image processing in the noise. It is satisfied with its results.And the simulation results is more satisfactory after the use of MATLAB language programming. Keyword:mathematical morphology image processing erosion dilation 1、限幅滤波法(又称程序判断滤波法) A、方法: 根据经验判断,确定两次采样允许的最大偏差值(设为A) 每次检测到新值时判断: 如果本次值与上次值之差<=A,则本次值有效 如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值B、优点: 能有效克服因偶然因素引起的脉冲干扰 C、缺点 无法抑制那种周期性的干扰 平滑度差 2、中位值滤波法 A、方法: 连续采样N次(N取奇数) 把N次采样值按大小排列 取中间值为本次有效值 B、优点: 能有效克服因偶然因素引起的波动干扰 对温度、液位的变化缓慢的被测参数有良好的滤波效果 C、缺点: 对流量、速度等快速变化的参数不宜 3、算术平均滤波法 A、方法: 连续取N个采样值进行算术平均运算 N值较大时:信号平滑度较高,但灵敏度较低 N值较小时:信号平滑度较低,但灵敏度较高 N值的选取:一般流量,N=12;压力:N=4 B、优点: 适用于对一般具有随机干扰的信号进行滤波 这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动 C、缺点: 对于测量速度较慢或要求数据计算速度较快的实时控制不适用 比较浪费RAM 4、递推平均滤波法(又称滑动平均滤波法) A、方法: 把连续取N个采样值看成一个队列 队列的长度固定为N 每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则) 把队列中的N个数据进行算术平均运算,就可获得新的滤波结果 N值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4 B、优点: 对周期性干扰有良好的抑制作用,平滑度高 适用于高频振荡的系统 C、缺点: 灵敏度低 对偶然出现的脉冲性干扰的抑制作用较差 不易消除由于脉冲干扰所引起的采样值偏差 不适用于脉冲干扰比较严重的场合 比较浪费RAM 5、中位值平均滤波法(又称防脉冲干扰平均滤波法) A、方法: 相当于“中位值滤波法”+“算术平均滤波法” 连续采样N个数据,去掉一个最大值和一个最小值 然后计算N-2个数据的算术平均值 N值的选取:3~14 B、优点: 融合了两种滤波法的优点 对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点: 测量速度较慢,和算术平均滤波法一样 比较浪费RAM 6、限幅平均滤波法 A、方法: 相当于“限幅滤波法”+“递推平均滤波法” 每次采样到的新数据先进行限幅处理, 再送入队列进行递推平均滤波处理 B、优点: 融合了两种滤波法的优点 对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点: 比较浪费RAM 7、一阶滞后滤波法 A、方法: 取a=0~1 本次滤波结果=(1-a)*本次采样值+a*上次滤波结果 B、优点: 对周期性干扰具有良好的抑制作用 适用于波动频率较高的场合 C、缺点: 相位滞后,灵敏度低 滞后程度取决于a值大小 实验三 数学形态学及其应用 一.实验目的 1.了解二值形态学的基本运算 2.掌握基本形态学运算的实现 3.了解形态操作的应用 二.实验基本原理 腐蚀和膨胀是数学形态学最基本的变换,数学形态学的应用几乎覆盖了图像处理的所有领域,给出利用数学形态学对二值图像处理的一些运算。 膨胀就是把连接成分的边界扩大一层的处理。而收缩则是把连接成分的边界点去掉从而缩小一层的处理。 二值形态学 I(x,y), T(i,j)为 0/1图像Θ 腐蚀:[]),(&),(),)((),(0,j i T j y i x I AND y x T I y x E m j i ++=Θ== 膨胀:[]),(&),(),)((),(0 ,j i T j y i x I OR y x T I y x D m j i ++=⊕== 灰度形态学 T(i,j)可取10以外的值 腐蚀: []),(),(min ),)((),(1 ,0j i T j y i x I y x T I y x E m j i -++=Θ=-≤≤ 膨胀: []),(),(max ),)((),(1 ,0j i T j y i x I y x T I y x D m j i +++=⊕=-≤≤ 1.腐蚀Erosion: {}x B x B X x ?=Θ: 1B 删两边 2B 删右上 图5-1 剥去一层(皮) 2.膨胀Dilation: {}X B x B X x ↑⊕:= 1B 补两边 2B 补左下 图5-2 添上一层(漆) 3.开运算open :B B X ⊕Θ=)(X B 4.闭close :∨ Θ⊕=B B X X B )( 5.HMT(Hit-Miss Transform:击中——击不中变换) 条件严格的模板匹配 ),(21T T T =模板由两部分组成。1T :物体,2T :背景。 {} C x x i X T X T X T X ??=?21, 图5-3 击不中变换示意图 性质: (1)φ=2T 时,1T X T X Θ=? (2))()()(21T X T X T X C Θ?Θ=? C T X T X )()(21Θ?Θ= )/()(21T X T X ΘΘ= 6.细化/粗化 (1)细化(Thin ) C T X X T X XoT )(/??=?= X 2 1 1 1 2 3 T 汽车电子Buck变换器短路恢复输出过冲分析 刘松, 丁宇, 杨启峰 (万代半导体元件上海有限公司, 上海201203) 摘要:本文详细分析了MOSFET开通延时、电流取样信号延时和前沿消隐时间所决定的系统最小导通时间是峰值电流模式下脉宽限流不能起作用的原因;探讨了用于汽车电子系统降压型Buck变换器在输出短路保护后恢复时输出电压产生过冲的问题,响应慢CCM模式导致COMP脚电压不能迅速放电;讨论了短路时输出二极管和引线电压使电感逐渐饱和的过程。输出过冲前沿尖峰产生于电感和输出电容的谐振,功率管直通导致稳定后输出电压等于输入电压。最后给出了解决此问题的电路和测试结果。实验的结果表明:此电路有效的抑止了短跑恢复中的输出电压过冲。 关键词:变换器,输出过冲,短路恢复,最小导通时间 Analysis of Output Overshooting During Short Circuit Recovery of Buck Converter in Automobile Electronic System Liu Song, Ding Yu, Yang Qifeng (AOS Semiconductor Co., Ltd., Shanghai 201203) Abstract: The reason why cycle by cycle current limit can not function even at peak current mode PWM is analyzed in detail. Output overshooting during short circuit recovery of Buck converter in automobile electronic system is discussed in this paper. The process of the inductor going into saturation gradually owing to drop voltage of catch diode and trace during output short circuit is also discussed. Spike voltage of output at leading edge is caused by the inductor and output capacitance. Power Mosfet holding always on makes output voltage equal to input voltage. The solution to treat this issue and test results are given in the end. Key words: converter; output overshoot, short circuit recovery, minimum on duration 1 引言 目前在汽车电子系统中,输入使用12V/24V的电压[1],然后采用Buck 降压变换器,得到5V、3.3V,2.5V,1.8V,1.2V等多种电压以提供给系统的各种逻辑数字芯片,模拟芯片,MCU或DSP的内核、I/O口等负载。系统要求电源芯片在输出短路时要有保护功能,暂态的输出短路状态消除后系统可以恢复。在一些Buck变换器应用中发现,在输出短路恢复的过程中,输出产生过冲,稳定后输出电压等于输入电压,由于汽车电子系统的输入电压高,这样就会损坏后面所带的芯片负载。本文将探讨这些问题及其产生的原因,并给出相应的电路以解决这些问题。 2 短路恢复过程输出过冲 通常在汽车电子系统中的Buck 降压变换器采用纹波电流小、传输功率大和EMI特性好的CCM峰值电流模式控制,同时具有过流和输出短路保护的功能,通过对电感峰值电流的逐周期自动控制,直接限定了电感峰值电流以及电感的平均电流。在输出短路时,保护电路就将其工作频率降到正常频率的1/8左右。因为工作频率较低,电感的平均电流也很低;当瞬态的输出短路状态撤除,变换器经过软启动电路重新启动。在实际的应用中发现,将输出短路再去除短路时,输出会出现较大过冲尖峰,超过输入电压,而且最后稳定到输入电压值。 如何学好数字信号处理课程 《数字信号处理》是相关专业本科生培养中,继《信号与系统》、《通信原理》、《数字逻辑》等课程之后的一门专业技术课。数字信号处理的英文缩写是DSP ,包括两重含义:数字信号处理技术(Digital Signal Processing )和数字信号处理器(Digital Signal Processor )。目前我们对本科生开设的数字信号处理课程大多侧重在处理技术方面,由于课时安排和其他一些原因,通常的特点是注重理论推导而忽略具体实现技术的介绍。最后导致的结果就是学生在学习了数字信号处理课程之后并不能把所学的理论知识与实际的工程应用联系起来,表现在他们做毕业设计时即使是对学过的相关内容也无法用具体的手段来实现,或者由于无法与具体实际相挂钩理解而根本就忘记了。我相信,我们开设本课程的根本目的应该是让学生在熟练掌握数字信号处理的基本原理基础上,能结合工程实际学习更多的DSP 实现技术及其在通信、无线电技术中的应用技能,这也是符合DSP 本身的二重定义的,学生通过本课程的学习,将应该能从事数字信号处理方面的研究开发、产品维护等方面的技术工作。其实很多学生在大学四年学习过后都有这种反思:到底我在大学学到了什么呢?难道就是一些理论知识吗?他们将如何面对竞争日益激烈的社会呢? 因此,大家在应用MATLAB学习并努力掌握数字信号处理的原理,基本理论的同时,应该始终意识到该课程在工程应用中的重要性,并在课后自学一些有关DSP技术及FPGA技术方面的知识。这样,学习本课程学习的三部曲是:一,学习数字信号处理的基本理论;二,掌握如何用MATLAB 实现一些基本的算法,如FFT ,FIR 和IIR 滤波器设计等;三,选择一种数字信号处理器作为实现平台进行实践学习,比如TI 公司的TMS320C54x 系列芯片,包括该处理器的硬件和软件系统,如Code Composer Studio及像MATLAB Link for Code Composer Studio这样的工具。 在学习数字信号处理的过程中,要注重培养自己的工程思维方法。数字信号处理的理论含有许多研究问题和解决问题的科学方法,例如频率域的分析方法、傅里叶变换的离散做法、离散傅里叶变换的快速计算方法等, 这些方法很好。虽然它们出现在信号处理的专业领域, 但是, 其基本精神是利用事物的特点和规律解决实际问题, 这在各个领域中是相同的。还有, 数字信号处理的理论的产生是有原因的, 这些原因并不难懂, 就是理论为应用服务, 提高使用效率。 例如: 为什么要使用频率域的分析方法?原因是从时间看问题, 往往看到事物的表面, 就像 我们用眼睛看水只能看到水的颜色, 看不到水的基本成分, 同样, 从时间看信号只能看到信号变化的大小和快慢,看不到信号的基本成分; 若采用分解物质的方法, 从成分的角度去看, 用化学分析则能看到水的各种成分, 同样, 用分解信号的方法则能看到信号里的基本成分, 至于基本成分的选择则视哪种基本类型最适合实际信号处理, 这就是频率域的分析方法。 又如: 为什么要采用离散的傅里叶变换?原因很简单, 因为要利用计算机计算傅里叶变换, 而计算机只能计算数据, 不能计算连续变量, 所以必须分离连续的傅里叶变换, 使它成为离散的傅里叶变换。 再如: 为什么要采用离散傅里叶变换的快速计算方法?原因是, 理论上离散傅里叶变换能让计算机分析频谱, 但是, 直接按照离散傅里叶变换的定义计算它, 计算量太大, 实用价值不大; 只有采用巧妙的方法降低计算量, 则离散傅里叶变换才有实用价值,这种巧妙的方法就 是离散傅里叶变换的快速计算方法。降低计算量的巧妙之处在, 离散傅里叶变换的计算量与信号的长度成正比, 科学家想办法将信号分解成为短信号, 分解成为短信号的方法有多种, 只要开动脑筋,我们也是一样可以想出来的。 最后,感谢同学们对我的支持,我会尽我所能,与大家共同探索"数字信号处理"领域的奇妙世界。 实验六: 数学形态学及其应用 实验原理 腐蚀和膨胀是数学形态学最基本的变换,数学形态学的应用几乎覆盖了图像处理的所有领域,给出利用数学形态学对二值图像处理的一些运算。 膨胀就是把连接成分的边界扩大一层的处理。而收缩则是把连接成分的边界点去掉从而缩小一层的处理。 二值形态学 II (xx ,yy ), TT (ii ,jj )为0011?图像 腐蚀: EE (xx ,yy )=(II ⊙TT )(xx ,yy )=?[II (xx +ii ,yy +jj )&TT (ii ,jj )]mm ii ,jj=00 膨胀: DD (xx ,yy )=(II ⊕TT )(xx ,yy )=?[II (xx +ii ,yy +jj )&TT (ii ,jj )]mm ii ,jj=00 灰度形态学 TT (ii ,jj )可取0011?以外的值 腐蚀: EE (xx ,yy )=(II ⊙TT )(xx ,yy )= mmii mm 00≤ii ,jj≤mm?11[II (xx +ii ,yy +jj )?TT (ii ,jj )] 膨胀: DD (xx ,yy )=(II ⊕TT )(xx ,yy )=mmmmxx 00≤ii ,jj≤mm?11[II (xx +ii ,yy +jj )+TT (ii ,jj )] 1.腐蚀Erosion : XX ⊙BB ={xx :BB xx ?xx } B 1删两边 B 2删右上 2.膨胀Dilation : XX ⊕BB ={xx :BB xx ↑xx } B1补两边B2补左下 3.开运算open: XX BB=(XX⊙BB)⊕BB 4.闭运算close: XX BB=(XX⊕BB)⊙BB 代码1: function[]= fs() I=imread('finger.tif'); subplot(1,2,1),imshow(I); title('原图'); BW=I; BW=rgb2gray(BW); SE=strel('square',2);%结构元素为边长2像素的正方形 BW=imopen(BW,SE);%开运算(先腐蚀再膨胀)可以消除小物体、在纤细点处分离物体、平滑较大物体的边界。 %BW=imerode(BW,SE); %腐蚀 %BW=medfilt2(BW,[3 3]); %中值滤波(腐蚀后中值滤波可能导致本来连接的指纹断开) %BW=imdilate(BW,SE); %膨胀 %BW=imclose(BW,SE); %闭运算(先膨胀再腐蚀)能够排除小型黑洞(黑色区域)。 BW=imdilate(BW,SE);%膨胀 BW=medfilt2(BW,[33]);%中值滤波(膨胀后中值滤波可能导致指纹图像噪声去除不干净) BW=imerode(BW,SE);%腐蚀 subplot(1,2,2),imshow(BW); title('处理后'); %BW=bwmorph(BW,'thin',Inf); %骨架化 %figure,imshow(BW); %title('骨架化'); 代码2: function[]= op() I=imread('rectangel.tif'); 过冲及振铃实验现象分析 1.测试电路及过冲、振铃现象 测试电路如下图所示,A点为电压输出口,B点为为了接入电阻而切开的口,C点为同轴电压监测点。 B A C 在B点出用导线连接时,在C点引同轴线到示波器(示波器内阻1M),观察到上升沿有过冲及振铃现象,如下图所示。 1.2 振铃产生的原因分析 1.2.1 振铃现象的产生 那么信号振铃是怎么产生的呢? 前面讲过,如果信号传输过程中感受到阻抗的变化,就会发生信号的反射。这个信号可能是驱动端发出的信号,也可能是远端反射回来的反射信号。根据反射系数的公式,当信号感受到阻抗变小,就会发生负反射,反射的负电压会使信号产生下冲。信号在驱动端和远端负载之间多次反射,其结果就是信号振铃。大多数芯片的输出阻抗都很低,如果输出阻抗小于PCB走线的特性阻抗,那么在没有源端端接的情况下,必然产生信号振铃。 信号振铃的过程可以用反弹图来直观的解释。假设驱动端的输出阻抗是10欧姆,PCB走线的特性阻抗为50欧姆(可以通过改变PCB走线宽度,PCB走线和内层参考平面间介质厚度来调整),为了分析方便,假设远端开路,即远端阻抗无穷大。驱动端传输3.3V电压信号。我们跟着信号在这条传输线中跑一次,看看到底发生了什么?为分析方便,忽略传输线寄生电容和寄生电感的影响,只考虑阻性负载。下图为反射示意图。 第1次反射:信号从芯片内部发出,经过10欧姆输出阻抗和50欧姆PCB 特性阻抗的分压,实际加到PCB走线上的信号为A点电压3.3*50/(10+50)=2.75V。传输到远端B点,由于B点开路,阻抗无穷大,反射系数为1,即信号全部反射,反射信号也是2.75V。此时B点测量电压是2.75+2.75=5.5V。 第2次反射:2.75V反射电压回到A点,阻抗由50欧姆变为10欧姆,发生负反射,A点反射电压为-1.83V,该电压到达B点,再次发生反射,反射电压-1.83V。此时B点测量电压为5.5-1.83-1.83=1.84V。 第3次反射:从B点反射回的-1.83V电压到达A点,再次发生负反射,反射电压为1.22V。该电压到达B点再次发生正反射,反射电压1.22V。此时B 点测量电压为1.84+1.22+1.22=4.28V。 第4次反射:……第5次反射:…… 如此循环,反射电压在A点和B点之间来回反弹,而引起B点电压不稳定。观察B点电压:5.5V->1.84V->4.28V->……,可见B点电压会有上下波动,这就是信号振铃。下图为B点电压随反射次数的变化示意图。 低通滤波:又叫一阶惯性滤波,或一阶低通滤波。是使用软件编程实现普通硬件RC 低通滤波器的功能。 适用范围:单个信号,有高频干扰信号。 一阶低通滤波的算法公式为: Y(n)X(n)(1)Y(n 1)αα=+-- 式中: α是滤波系数;X(n)是本次采样值;Y(n 1)-是上次滤波输出值;Y(n)是本次滤波输出值。 滤波效果1: 红色线是滤波前数据(matlab 中生成的正弦波加高斯白噪声信号) 黄色线是滤波后结果。 滤波效果2: matlab中函数,相当于一阶滤波,蓝色是原始数据(GPS采集到的x(北)方向数据,单位m),红色是滤波结果。 一阶滤波算法的不足: 一阶滤波无法完美地兼顾灵敏度和平稳度。有时,我们只能寻找一个平衡,在可接受的灵敏度范围内取得尽可能好的平稳度。 互补滤波:适用于两种传感器进行融合的场合。必须是一种传感器高频特性好(动态响应好但有累积误差,比如陀螺仪。),另一传感器低频特性好(动态响应差但是没有累积误差,比如加速度计)。他们在频域上互补,所以进行互补滤波融合可以提高测量精度和系统动态性能。 应用:陀螺仪数据和加速度计数据的融合。 互补滤波的算法公式为: 1122Y(n)X (n)(X (n)Y(n 1))αα+=+-- 式中:1α和2α是滤波系数;1X (n)和2X (n)是本次采样值;Y(n 1)-是上次滤 波输出值;Y(n)是本次滤波输出值。 滤波效果 (测试数据): 蓝色是陀螺仪 信号,红色是加 速度计信号,黄 色是滤波后的 角度。 . 互补滤波实际效果: . 卡尔曼滤波:卡尔曼滤波器是一个“optimal recursive data processing algorithm (最优化自回归数据处理算法)”。对于解决很大部分的问题,它是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测。 首先,用于测量的系统必须是线性的。 (k)(k 1)(k)(k)X AX BU w =-++ (k)(k)(k)Z HX v =+ (k)X 是系统k 时刻的状态,(k)U 是系统k 时刻的控制量。(k)Z 是系统k 时 刻的测量值。A 和B 为系统参数,(k)w 和(k)v 分别表示过程和测量的噪声,H 是测量系统参数。 在进行卡尔曼滤波时: 首先进行先验预测: (k 1|k)(k |k)(k)(k)X AX BU w +=++ 计算先验预测方差: '(k 1|k)(k |k)(k)P AP A Q +=+ 计算增益矩阵: (k 1)(k 1|k)'/((k 1|k)'(k 1))Kg P H HP H R +=++++ 后验估计值: (k 1|k 1)(k 1|k)(k 1)(Z(k 1)(k 1|k))X X Kg HX ++=++++-+ 后验预测方差: (k 1|k 1)(1(k 1))(k 1|k)P Kg H P ++=-++ 其中,(k)Q 是系统过程激励噪声协方差,(k)R 是测量噪声协方差。 举例说明: (下文中加粗的是专有名词,需要理解) 预测小车的位置和速度的例子(博客+自己理解): 信号过冲及消除方法 在组合逻辑电路中,信号要经过一系列的门电路和信号变换。由于延迟的作用使得当输入信号发生变化时,其输出信号不能同步地跟随输入信号变化,而是经过一段过渡时间后才能达到原先所期望的状态。这时会产生小的寄生毛刺信号,使电路产生瞬间的错误输出,造成逻辑功能的瞬时紊乱。在FPGA内部没有分布电感和电容,无法预见的毛刺信号可通过设计电路传播,从而使电路出现错误的逻辑输出。 任何组合电路、反馈电路和计数器都可能是潜在的毛刺信号发生器。毛刺并不是对所有输入都有危害,如触发器的D输入端,只要毛刺不出现在时钟的上升沿并满足数据的建立保持时间,就不会对系统造成危害。而当毛刺信号成为系统的启动信号、控制信号、握手信号,触发器的清零信号(CLEAR)、预置信号(PRESET)、时钟输入信号(CLK)或锁存器的输入信号就会产生逻辑错误。任何一点毛刺都可能使系统出错,因此消除毛刺信号是FPGA设计中的一个重要问题。毛刺问题在电路连线上是找不出原因的,只能从逻辑设计上采取措施加以解决。消除毛刺的一般方法有以下几种: (1)利用冗余项消除毛刺 函数式和真值表所描述的是静态逻辑,而竞争则是从一种稳态到另一种稳态的过程。因此竞争是动态过程,它发生在输入变量变化时。此时,修改卡诺图,增加多余项,在卡诺图的两圆相切处增加一个圆,可以消除逻辑冒险。但该法对于计数器型产生的毛刺是无法消除的。 (2)取样法 由于冒险出现在变量发生变化的时刻,如果待信号稳定之后加入取样脉冲,那么就只有在取样脉冲作用期间输出的信号才能有效。这样可以避免产生的毛刺影响输出波形。 (3)吸收法 增加输出滤波,在输出端接上小电容C可以滤除毛刺。但输出波形的前后沿将变坏,在对波形要求较严格时,应再加整形电路,该方法不宜在中间级使用。 (4)延迟办法 因为毛刺最终是由于延迟造成的,所以可以找出产生延迟的支路。对于相对延迟小的支路,加上毛刺宽度的延迟可以消除毛刺。但有时随着负载增加,毛刺会继续出现,因而这种方法也是有局限性的。而且采用延迟线的方法产生延迟更会由于环境温度的变化而使系统变不可靠。 (5)锁存办法 当计数器的输出进行相"与"或相"或"时会产生毛刺。随着计数器位数的增加,毛刺的数量和毛刺的种类也会越来越复杂。毛刺在计数器电路输出中的仿真结果如图4所示,从图中可发现有毛刺出现。此时,可通过在输出端加D触发器加以消除。。 数据中的毛刺被明显消除。当FPGA输出有系统内其它部分的边沿或电平敏感信号时,应在输出端寄存那些对险象敏感的组合输出。对于异步输入,可通过增加输入寄存器确保满足状态机所要求的建立和保持时间。对于一般情况下产生的毛刺,可以尝试用D触发器来消除。但用D触发器消除时,有时会影响到时序,需要考虑很多问题。所以要仔细地分析毛刺产生的来源和毛刺的性质,采用修改电路或其它办法来彻底消除。 目录 一绪论 (1) 1.1 数学形态学简介 (1) 1.2 数学形态学与数字图像处理 (1) 1.3 本次课程设计的目的与要求 (2) 二数学形态学的基本运算 (3) 2.1 基本概念 (3) 2.1.1结构元素 (3) 2.1.2膨胀与腐蚀 (3) 2.2 二值形态学图像处理 (4) 2.2.1 膨胀 (4) 2.2.2 腐蚀 (6) 2.2.3 开运算 (7) 2.2.4 闭运算 (8) 2.3 灰度形态学图像处理 (9) 2.3.1 膨胀 (9) 2.3.2 腐蚀 (10) 2.3.3 开运算与闭运算 (11) 2.4 综述 (13) 三数学形态学滤波器去噪 (15) 3.1 概述 (15) 3.2噪声模型 (16) 3.2.1 高斯噪声 (16) 3.2.2 椒盐噪声 (16) 3.3形态学滤波器 (17) 3.4形态学图像去噪原理 (20) 3.5形态学图像去噪的应用 (20) 小结与体会 (21) 参考文献 (22) 附录 (23) 一绪论 1.1数学形态学简介 数学形态学作为一门新兴的图像处理与分析学科,1964年由法国的G.Mathern和J.Serra在积分几何的基础上首次创立。70年代初,采用数学形态学的学者们开拓了图像分析的一个新的领域。经过十多年的理论与实践探索,G.Mathern和J.Serra等人在研究中认识到,对图像先作开运算接着再作闭运算,可以产生一种幂等运算;采用递增尺寸的交变开闭序列作用于图像,可有效地消除图像的噪声,1982年他们正式提出了形态学滤波器的概念。90年代数学形态学有两个显著的发展趋势,第一个是致力于运动分析,包括编码与运动景物描述;第二个是算法与硬件结构的协调发展,用于处理数值函数的形态学算子的开发与设计。 什么是数字信号处理?有哪些应用? 利用数字计算机或专用数字硬件、对数字信号所进行的一切变换或按预定规则所进行的一切加工处理运算。 例如:滤波、检测、参数提取、频谱分析等。 对于DSP:狭义理解可为Digital Signal Processor 数字信号处理器。广义理解可为Digital Signal Processing 译为数字信号处理技术。在此我们讨论的DSP的概念是指广义的理解。 数字信号处理是利用计算机或专用处理设备,以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理,以得到符合人们需要的信号形式。 信号处理的实质是对信号进行变换。 信号处理的目的是获取信号中包含的有用信息,并用更直观的方式进行表达。 DSP的应用几乎遍及电子学每一个领域。 ▲通用数字信号处理器:自适应滤波,卷积,相关,数字滤波,FFT, 希尔伯特变换,波形生成,窗函数等等。 ▲语音信号处理:语音增强、识别、合成、编码、信箱等,文字/语音转换 ▲图形/图像处理:三维动画,图象鉴别/增强/压缩/传输,机器人视觉等等图 ▲特殊应用数字信号处理:振动和噪声分析与处理,声纳和雷达信号处理, 通信信号处理, 地震信号分析与处理,汽车安全及全球定位,生物医学工程等等。 在医疗、军事、汽车等行业,以及通信市场、消费类电子产品等中具有广阔的市场前景。 数字信号处理系统的基本组成:前置预滤波器(PrF)、a/d变换器(ADC)、数字信号处理器(DSP)、d/a变换器(DAC)、模拟滤波器(PoF) 数字信号处理特点: 1.大量的实时计算(FIR IIR FFT), 2.数据具有高度重复(乘积和操作在滤波、卷积和FFT中等常见) 数字信号处理技术的意义、内容 数字信号处理技术是指数字信号处理理论的应用实现技术,它以数字信号处理理论、硬件技术、软件技术为基础和组成,研究数字信号处理算法及其实现方法。 意义: 在21世纪,数字信号处理是影响科学和工程最强大的技术之一 它是科研人员和工程师必须掌握的一门技巧 DSP芯片及其特点 ▲采用哈佛结构体系:独立的程序和数据总线,一个机器周期可同时进行程序读出和数据存取。对应的:冯·诺依曼结构。 ▲采用流水线技术: ▲硬件乘法器:具有硬件连线的高速“与或”运算器 ▲多处理单元:DSP内部包含多个处理单元。 ▲特殊的DSP指令:指令具有多功能,一条指令完成多个动作;如:倒位序指令等 ▲丰富的外设▲功耗低:一般DSP芯片功耗为0.5~4W。采用低功耗技术的DSP芯片只有0.1W/3.3V、1.6V (电池供电) DSP芯片的类别和使用选择 ▲按特性分:以工作时钟和指令类型为指标分类▲按用途分:通用型、专用型DSP芯片 ▲按数据格式分:定点、浮点各厂家还根据DSP芯片的CPU结构和性能将产品分成若干系列。 TI公司的TMS320系列DSP芯片是目前最有影响、最为成功的数字信号处理器,其产品销量一直处于领先地位,公认为世界DSP霸主。 ?目前市场上的DSP芯片有: ?美国德州仪器公司(TI):TMS320CX系列占有90% 1、限幅滤波法(又称程序判断滤波法) 2、A、方法: 3、根据经验判断,确定两次采样允许的最大偏差值(设为A) 4、每次检测到新值时判断: 5、如果本次值与上次值之差<=A,则本次值有效 6、如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值 7、B、优点: 8、能有效克服因偶然因素引起的脉冲干扰 9、C、缺点 10、无法抑制那种周期性的干扰 11、平滑度差 12、 13、2、中位值滤波法 14、A、方法: 15、连续采样N次(N取奇数) 16、把N次采样值按大小排列 17、取中间值为本次有效值 18、B、优点: 19、能有效克服因偶然因素引起的波动干扰 20、对温度、液位的变化缓慢的被测参数有良好的滤波效果 21、C、缺点: 22、对流量、速度等快速变化的参数不宜 23、 24、 25、 26、3、算术平均滤波法 27、A、方法: 28、连续取N个采样值进行算术平均运算 29、N值较大时:信号平滑度较高,但灵敏度较低 30、N值较小时:信号平滑度较低,但灵敏度较高 31、N值的选取:一般流量,N=12;压力:N=4 32、B、优点: 33、适用于对一般具有随机干扰的信号进行滤波 34、这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动 35、C、缺点: 36、对于测量速度较慢或要求数据计算速度较快的实时控制不适用 37、比较浪费RAM 38、 39、4、递推平均滤波法(又称滑动平均滤波法) 40、A、方法: 41、把连续取N个采样值看成一个队列 42、队列的长度固定为N 43、每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则) 44、把队列中的N个数据进行算术平均运算,就可获得新的滤波结果 (19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910243472.2 (22)申请日 2019.03.28 (71)申请人 西北核技术研究所 地址 710024 陕西省西安市灞桥区平峪路 28号 (72)发明人 方文饶 黄文华 王璐璐 付超 邵浩 李平 章勇华 杨志强 巴涛 (74)专利代理机构 西安智邦专利商标代理有限 公司 61211 代理人 汪海艳 (51)Int.Cl. H03F 1/30(2006.01) H03F 3/24(2006.01) (54)发明名称 激励信号触发下功放过冲抑制效率提升方 法、电路及功放 (57)摘要 本发明属于固态微波功率放大器领域,涉及 一种激励信号触发下功放过冲抑制效率提升方 法、电路及功放,旨在解决功率放大器稳定度低 或者效率低的问题,本发明脉冲功率放大器在微 波激励信号前面部分工作在高效率的B类,在激 励信号的下降沿到达前通过栅压控制电路调整 栅极偏置电压,改变功率放大器工作类别,将栅 极偏置电压调整到A类,从而使功率放大器在激 励信号下降沿瞬间工作在A类,使微波激励信号 关闭瞬间漏极电压不产生过冲。权利要求书2页 说明书8页 附图4页CN 109995333 A 2019.07.09 C N 109995333 A 权 利 要 求 书1/2页CN 109995333 A 1.激励信号触发下功放过冲抑制效率提升方法,其特征在于,包括以下步骤: 1】t0时刻前: 射频信号源未产生输出信号,控制栅压控制电路给脉冲功率放大器提供B类工作点偏置电压V gb;脉冲功率放大器不工作; 2】t0时刻: 射频信号源产生输出信号; 射频信号源输出信号经过耦合检波后,产生包络检波信号; 检测包络检波信号上升沿,产生触发信号,触发漏压控制电路给脉冲功率放大器漏极提供漏极偏置电压; 射频信号源输出信号送入延迟电路,经延迟电路进行延迟,延迟时长为τ; 栅压控制电路继续给脉冲功率放大器提供B类工作点偏置电压V gb; 3】t0时刻至t1时刻之间: 脉冲功率放大器漏极偏置电压从0V逐渐上升到所需的漏极偏置电压; 栅压控制电路继续给脉冲功率放大器提供B类工作点偏置电压V gb; 4】t1时刻: 脉冲功率放大器漏极偏置电压已经稳定为所需的漏极偏置电压; 经过延迟电路延迟τ的射频信号源输出信号到达脉冲功率放大器输入端,成为脉冲功率放大器输入信号,脉冲功率放大器开始工作,并产生脉冲功率放大器输出信号; 栅压控制电路继续给脉冲功率放大器提供B类工作点偏置电压V gb; 5】t1时刻至tc时刻之间: 脉冲功率放大器工作在B类; 6】tc时刻: 检测到包络检波信号的下降沿; 给栅压控制电路提供触发信号,触发栅压控制电路开始调整栅极偏置电压; 下降沿触发信号传输到延时电路进行延时,延时时长为τ; 7】tc时刻至t2时刻之间: 脉冲功率放大器工作状态由B类逐渐转化为A类,此时处于AB类工作状态; 8】t2时刻: 栅极偏置电压已经变化为A类工作点偏置电压V ga; 经过延迟电路延迟τ的射频信号源输出信号下降沿到达脉冲功率放大器输入端; 经过延时电路延时τ的下降沿触发信号到达漏压控制电路,漏压控制电路停止给脉冲功率放大器漏极提供漏极偏置电压; 脉冲功率放大器停止工作; 9】t2时刻至t3时刻之间: 脉冲功率放大器偏置在A类; 脉冲功率放大器的漏极偏置电压逐渐降到0V; 10】t3时刻: 脉冲功率放大器的漏极偏置电压降到0V; 栅压控制电路恢复给脉冲功率放大器提供B类工作点偏置电压V gb。 2基于数学形态学的图像噪声处理.
10种常用滤波方法
实验三 数学形态学及其应用
短路恢复过冲原因及解决方法
如何学习数字信号处理
实验六数学形态学及其应用
过冲及振铃现象实验分析
常见的信号处理滤波方法
信号过冲及消除方法
数学形态学去噪
什么是数字信号处理
常用滤波方法
【CN109995333A】激励信号触发下功放过冲抑制效率提升方法、电路及功放【专利】