三相异步电动机电磁计算(最新整理)
(完整版)力-电电磁感应计算题——含答案.docx
1、如图( a)两相距L=0.5m的平行金属导轨固定于水平面上,导轨左端与阻值R=2Ω的电阻连接,导轨间虚线右侧 存在垂直导轨平面的匀强磁场,质量 m=0.2kg的金属杆垂直于导轨上,与导轨接触良好,导轨与金属杆的电阻可忽略, 杆在水平向右的恒定拉力作用下由静止开始运动,并始终与导轨垂直,其v- t 图像如图(b)所示,在15s 时撤去拉力,同时使磁场随时间变化,从而保持杆中电流为0,求: ( 1)金属杆所受拉力的大小为F; ( 2)0-15s 匀强磁场的磁感应强度大小为; ( 3)15-20s 内磁感应强度随时间的变化规律。 2、如图所示,在匀强磁场中有一倾斜的平行金属导轨,导轨间距为L=0.2m ,长为 2d, d=0.5m,上半段 d 导轨光滑, 下半段 d 导轨的动摩擦因素为μ=,导轨平面与水平面的夹角为θ=30°.匀强磁场的磁感应强度大小为B=5T,方向与导轨平面垂直.质量为m=0.2kg 的导体棒从导轨的顶端由静止释放,在粗糙的下半段一直做匀速运动,导体棒始终与导轨垂直,接在两导轨间的电阻为R=3Ω,导体棒的电阻为r=1 Ω,其他部分的电阻均不计,重力加速度取 g=10m/s 2,求: (1)导体棒到达轨道底端时的速度大小; (2)导体棒进入粗糙轨道前,通过电阻R 上的电量 q; (3)整个运动过程中,电阻R 产生的焦耳热 Q. 3、如图甲所示,两根足够长、电阻不计的光滑平行金属导轨相距为L1=1m,导轨平面与水平面成θ=30角,上端连接阻值= 1. 5Ω的电阻;质量为= 0. 2kg 、阻值r= 0. 5Ω的金属棒 ab 放在两导轨上,距离导轨最上端为L 2= 4m,棒与导轨垂直并保持良好接触。整个装置处于一匀强磁场中,该匀强磁场方向与导轨平面垂直,磁感应强度大 小随时间变化的情况如图乙所示。为保持ab 棒静止,在棒上施加了一平行于导轨平面的外力F,g=10m/s 2 求:(1)当t= 2s 时,外力F1的大小; (2)当t= 3s 前的瞬间,外力F2的大小和方向; ( 3)请在图丙中画出前4s 外力F随时间变化的图像(规定F方向沿斜面向上为正);
电磁感应计算题总结(易错题型)
电磁感应易错题 1.如图所示,边长L=0.20m 的正方形导线框ABCD 由粗细均匀的同种材料制成,正方形导线框每边的电阻R 0=1.0Ω,金属棒MN 与正方形导线框的对角线长度恰好相等,金属棒MN 的电阻r=0.20Ω。导线框放置在匀强磁场中,磁场的磁感应强度B =0.50T ,方向垂直导线框所在平面向里。金属棒MN 与导线框接触良好,且与导线框对角线BD 垂直放置在导线框上,金属棒的中点始终在BD 连线上。若金属棒以v =4.0m/s 的速度向右匀速运动,当金属棒运动至AC 的位置时,求:(计算结果保留两位有效数字) (1)金属棒产生的电动势大小; (2)金属棒MN 上通过的电流大小和方向; (3)导线框消耗的电功率。 2.如图所示,正方形导线框abcd 的质量为m 、边长为l ,导线框的总电阻为R 。导线框从垂直纸面向里的水平有界匀强磁场的上方某处由静止自由下落,下落过程中,导线框始终在与磁场垂直的竖直平面内,cd 边保持水平。磁场的磁感应强度大小为B ,方向垂直纸面向里,磁场上、下两个界面水平距离为l 。已知cd 边刚进入磁场时线框恰好做匀速运动。重力加速度为g 。 (1)求cd 边刚进入磁场时导线框的速度大小。 (2)请证明:导线框的cd 边在磁场中运动的任意瞬间,导线框克服安培力做功的功率等于导线框消耗的电功率。 (3)求从线框cd 边刚进入磁场到ab 边刚离开磁场的过程中,线框克服安培力所做的功。 3.如图所示,在高度差h =0.50m 的平行虚线范围内,有磁感强度B =0.50T 、方向水平向里的匀强磁场,正方形线框abcd 的质量m =0.10kg 、边长L =0.50m 、电阻R =0.50Ω,线框平面与竖直平面平行,静止在位置“I”时,cd 边跟磁场下边缘有一段距离。现用一竖直向上的恒力F =4.0N 向上提线框,该框由位置“Ⅰ”无初速度开始向上运动,穿过磁场区,最后到达位置“Ⅱ”(ab 边恰好出磁场),线框平面在运动中保持在竖直平面内,且cd 边保持水平。设cd 边刚进入磁场时,线框恰好开始做匀速运动。(g 取10m /s 2) 求:(1)线框进入磁场前距磁场下边界的距离H 。 (2)线框由位置“Ⅰ”到位置“Ⅱ”的过程中,恒力F 做的功是多少?线框内产生的热量又是多少 ? a b d c l l
Y2-160M1-2三相异步电动机电磁设计解读
目录 摘要 ..................................................................... I Abstract................................................................. II 第一章绪论........................................................ - 4 - 1.1 工程背景...................................................... - 4 - 1.2 该课题设计的主要内容.......................................... - 4 - 第二章三相异步电动机................................................ - 6 - 2.1 三相异步电动机结构............................................ - 6 - 2.1.1 异步电动机的定子结构..................................... - 7 - 2.1.2 异步电动机的转子结构..................................... - 8 - 2.1.3 三相异步电动机接线图..................................... - 8 - 2.2 三相异步电动机工作原理........................................ - 9 - 2.3 三相异步电动机的机械特性和工作特性........................... - 12 - 第三章三相异步电机电磁设计......................................... - 14 - 3.1 主要尺寸和空气隙的确定....................................... - 14 - 3.2 定子绕组与铁芯设计........................................... - 14 - 3.2.1 定子绕组型式和节距的选择................................ - 15 - 3.2.2 定子冲片的设计.......................................... - 16 - 3.3 额定数据及主要尺寸........................................... - 17 - 3.4 磁路计算..................................................... - 19 - 3.5 性能计算..................................................... - 22 - 3.5.1 工作性能计算............................................ - 22 - 3.5.2 起动性能计算............................................ - 26 - 第四章电机转动轴的工艺分析......................................... - 28 - 4.1 转动轴的加工工艺分析......................................... - 28 - 4.2 选择设备和加工工序........................................... - 30 - 4.3 成品的最后工序............................................... - 31 - 小结与致谢........................................................... - 32 - 参考文献............................................................. - 33 -
水轮机的选型计算
一、水轮机选型计算的依据及其基本要求.....................................................................1 1 水轮机选型时需由水电勘测设计院提供下列原始数据.................................1 2 水轮机选型计算应满足下述基本要求......................................................1 二、反击式水轮机基本参数的选择计算..................................................................1 1 根据最大水头及水头变化范围初步选定水轮机的型号.................................1 2 按已选定的水轮机型号的主要综合特性曲线来计算转轮参数.................................1 3 效率修正..........................................................................................4 4 检查所选水轮机工作范围的合理性.........................................................4 5 飞逸转速计算....................................................................................5 6 轴向推力计算....................................................................................5 三、水斗式水轮机基本参数的选择计算......................................................10 1 水轮机流量.......................................................................................10 2 射流直径d 0.......................................................................................10 3 确定D1/d 0.......................................................................................10 4 水轮机转速n ....................................................................................10 5 功率与效率................................................................................................11 6 飞逸转速..........................................................................................12 7 水轮机的水平中心线至尾水位距离A ......................................................12 8 喷嘴数Z 0的确定....................................................................................12 9 水斗数目Z1的确定.................................................................................12 10 水斗和喷嘴的尺寸与射流直径的关系...................................................13 11 引水管、导水肘管及其曲率半径.........................................................13 12 转轮室的尺寸..............................................................................14 A 水机流量..........................................................................................17 B 射流直径.............................................................................................17 C 水斗宽度的选择..........................................................................................17 D D/B 的选择.............................................................................................17 E 水轮机转速的选择.......................................................................................17 F 单位流量的计算..........................................................................................17 G 水轮机效率................................................................................................18 H 飞逸转速................................................................................................18 I 转轮重量的计算..........................................................................................18 四、调速器的选择.............................................................................................20 1 反击式水轮机的调速功计算公式.....................................................................20 2 冲击式水轮机的调速功计算公式.....................................................................20 五、阀门型号、大小的选择.................................................................................21 1 球阀的选择................................................................................................21 2 蝴蝶阀的选择 (22) 目 录
水轮发电机电磁计算单SFW3200-8-1730
水轮发电机计算单 发电机型号: 设计时间 :2011-10-29 16:01:58 ======================================================================= 序号名称变量结果单位 ======================================================================= 一. 基本数据 1.1 额定数据 1.101 额定功率 Pn 2000 (kW) 1.102 额定功率因素 cosθn .8 1.103 额定容量 SN 2500 (kVA) 1.104 额定电压 UN 6300 (V) 1.105 相电压 Uθ 3637.307 (V) 1.106 额定电流 IN 229.114 (A) 1.107 相电流 Iθ 229.114 (A) 1.108 额定转速 nN 750 (r/min) 1.109 飞逸转速 nr 4 (r/min) 1.110 额定频率 fN 50 (Hz) 1.111 极数 2p 8 1.112 相数 M 3 1.113 飞轮力矩 GD2 737.895 (kN.m) 1.114 无功功率 Pr 1500.0000 (kW) 1.115 机械时间常数 Tmec 5686.403 (s) 1.115 重量估算 Gr 5.645 (t) 1.2 定子铁芯和转子磁极铁芯尺寸 1.201 定子铁芯外径 Dl 173 (cm) 1.202 定子铁芯内径 Di 132 (cm) 1.203 定子槽宽度 bs 1.68 (cm) 1.204 定子槽高度 hs 7.48 (cm) 1.205 定子槽楔高度 hk .5 (cm) 1.206 定子线圈单边绝缘厚度δi .265 (cm) 1.207 定子铁芯径向通风槽宽度及通风槽数 bvnv 9 (cm) 1.208 无通风槽的定子铁芯长度 l 45 (cm) 1.209 各段铁芯长度不相等时相邻通风槽的平均距离 tv 5.4 (cm) 1.3 定子绕组数据 1.301 定子槽数 Z 108 1.302 每极每相槽数 q 4.5 1.303 每项并联支路数 a 1
电磁感应计算题精选
3. 如图所示,两根光滑的金属导 计。斜面处在一匀强磁场中,磁场方向垂直于斜面向上。质量为m,电阻可不计的金属棒 直的恒力作用下沿导轨匀速上滑,并上升h高度,如图所示。在这过程中 A. 作用于金属捧上的各个力的合力所作的功等于零 B. 作用于金属捧上的各个力的合力所作的功等 于mgh与电阻R上发出的焦耳热之和 C. 恒力F与安培力的合力所作的功等于零 ab,在沿着斜面与棒垂 4. 两根光滑金属导轨平行放置在倾角为0=30。的斜面上,导轨左端接 有电阻R=10 / Q,导轨自身电阻忽略不计。匀强磁场垂直于斜面向上,磁感强度B=0.5T。质量Y 为m=0.1kg ,电阻可不计的金属棒ab静止释放,沿导轨下滑。如图所示,设导轨足够长,导轨宽度L=2m,金属棒ab下滑过程中始终与导轨接触良好,当金属棒下滑h=3m时,速度恰好达到最大速度,求此(1)最大速度(2)从开始到速度达到T h 』 第12讲法拉第电磁感应定律4----能量问题1 能的转化与守恒,是贯穿物理学的基本规律之一。从能量的观点来分析、解决问题,既是学习物理的基本功,也是一 种能力。自然界存在着各种不同形式的能,如; ■-动能 机械能:重力势能 I弹性势能(弹簧) ?热能 1. 如图16-7-6所示,在竖直向上B=0.2T的匀强磁场内固定一水平无电阻的光滑U形金属导轨,轨距50cm。 金属导线ab的质量m=0.1kg,电阻r=0.02 Q且ab垂直横跨导轨。导轨中接入电阻 F=0.1N拉着ab向右匀速平移,贝U (1) ab的运动速度为多大? (2 )电路中消耗的电功率是多大? (3)撤去外力后R上还能产生多少热量? 图16-7-6 2. 相距为d的足够长的两平行金属导轨(电阻不计)固定在绝缘水平面上,导轨间有垂直轨道平面的匀强磁 场,磁感强度为B,导轨左端接有电容为C的电容器,在导轨上放置一金属棒并与导轨接触良好,如图所 示。现用水平拉力使金属棒开始向右运动,拉力的功率恒为P,在棒达到最大速度之前,下列叙述正确的是 R=0.08 Q,今用水平恒力 A.金属棒做匀加速运动 B.电容器所带电量不断增加 C.作用于金属棒的摩擦力的功率恒为P D.电容器a极板带负电
异步电动机机械特性的MATLAB仿真
辽宁工业大学 实验室开放课题设计(论文) 题目:异步电动机机械特性的MATLAB仿真》 院(系):电气工程学院 专业班级:自动化 131 学号: 0 ` 学生姓名:徐峰 指导教师:赵丽丽
起止时间:
摘要 异步电动机以其结构简单、运行可靠、效率较高、成本较低等特点,在日常生活中得到广泛的使用。目前,电动机控制系统在追求更高的控制精度的基础上变得越来越复杂,而仿真是对其进行研究的一个重要手段。MATLAB是一个高级的数学分析和运算软件,可用动作系统的建模和仿真。在分析三相异步电动机物理和数学模型的基础上,应用MATLAB软件简历了相对应的仿真模型;在加入相同的三相电压和转矩的条件下,使用实际电机参数,与MALAB给定的电机模型进行了对比仿真。 第一章对异步电机的实验要求做出了相关的描述,第二章对MATLAB仿真软件做了一定的介绍,第三章是对异步电动机的机械特性、启动、制动和正反转进行理论分析和仿真模拟以及仿真结果的分析。 经分析后,表明模型的搭建是合理的。因此,本设计将结合MATLAB的特点,对三相异步电机进行建模和仿真,并通过实际的电动机参数,对建立的模型进行了验证。 关键词:异步电机、数学模型、MATLAB仿真、三相异步电动机
目录 第1章实验任务及要求 (1) 第2章 MATLAB及SIMULINK的介绍 (2) MATLAB介绍 (2) S IMULINK模块的介绍 (3) 第3章仿真实验 (4) 三相异步电动机的机械特性 (4) 三相异步电动机起动的仿真 (6) 三相异步电动机制动仿真 (8) 三相异步电动机正反转仿真 (10) 第4章总结 (12) 参考文献 (13) 附录 (14)
水轮机主机选型
摘要 水电站机电部分设计主要根据获得的设计材料中给定的水头范围进行的主机选型,根据选择的三方案中择优进行模型综合特性曲线的绘制,即选出一方案进行绘制,再根据效率,转速等选其一进行蜗壳、尾水管、水轮发电机外形的计算和绘图,最后进行水轮机的调节保证计算和调速器设备选择。 关键字:水轮机主机选型;水电站机电设备初步计算;外形设计;调节保证计算。
前言 毕业设计是高等教育教学中的最后一个教学环节,是实践性教育的环节。 毕业设计与其他教学环节构成有机的整体,也是各个教学环节的继续、深化补充和检验,是将分散、局部的知识内容加以全面的结合,这次设计提高了我们运用知识的综合能力,将知识化为能力,巩固和加深所学知识,培养知识,综合了系统化的运用。 目前,我国大陆水力资源理论蕴藏在1万KW以上的河流共3886条,水力资源理论蕴藏年发电量6082.9Tw·h;技术可开发装机容量541.64GW。经济可开发装机容量401.8GW。我国水力资源具有三个鲜明特点:第一、在地域上分布极不平衡,西部多,东部少。西部水利资源开发出了满足西部电力市场的需要,更重要的是考虑东部电力市场。第二、大多数河流年内、年际经流分布不均。第三、水力资源集中于大江大河,有利于集中开发和规模外送。 本次设计的主要内容为主机选型、蜗壳、尾水管、发电机确定和调节保证计算。设计过程中,依据资料水电站水头,单机引水流量,总装机,对水轮机发电进行初选,并根据单位转速,模型综合特性曲线,对水轮机型号,转速,效率出力等进行认真计算,校验,对选择方案的蜗壳水管,水轮机选型和绘图。对水轮机进行调节保证机算。
通过这次对相关专业知识的课题设计,更加深入的认识知识和实际应用,学会知识与实际结合、与实践结合,得以充分利用知识为以后工作打下了坚实的基础。 编者 2012年5月 目录 摘要 (1) 前言 (2) 目录 (3) 第一章水轮机型号选择 (5) 第一节水轮机型的选择 (5) 第二节初选水轮机基本参数的计算 (6) 第三节水轮机运转综合特性曲线的绘制 (17) 第四节待选方案的综合比较和确定 (19) 第二章蜗壳计算 (21) 第一节蜗壳形式、进口断面参数选择 (21) 第二节蜗壳各断面参数计算 (23) 第三节金属蜗壳图 (25) 第三章尾水管选型 (26) 第四章水轮发电机的初步选择计算 (27) 第五章调节保证计算及设备的选择 (33) 第一节调节保证计算 (33)
水轮发电机基本知识介绍
水轮发电机基本知识介绍 一. 关于发电机电磁设计 水轮发电机电磁设计的任务是按给定的容量、电压、相数、频率、功率因数、转速等额定值和其他技术要求来确定发电机的有效部分尺寸、电磁负荷、绕组数据及性能参数等。 水轮发电机电气参数的选择,主要依据电力系统对电站电气参数和主接线的要求,同时根据《水轮发电机基本技术条件》、《导体和电器设备选择设计技术规定》等相关规范来选择,当然也要根据具体电站的要求。 在电磁设计过程中考核的几个主要参数:磁密,定、转子线圈温升,短路比,主要电抗,效率,飞轮力矩。 二. 电磁设计需要输入的基本技术数据 (一)额定容量、有功功率、无功功率和功率因数的关系 Φ--发电机输出电流在时间相位上滞后于电压的相位角 额定容量S=√3U N I N =22Q P 有功功率P=√3U N I N cos φ=S ·cos φ 无功功率Q=√3U N I N sin φ=S ·sin φ cos φ= S P (二)发电机的电磁计算需要具备以下基本的额定数据: 功率/容量,功率因数,电压,转速(极数),频率,相数,飞轮力矩(转运惯量) 1. 额定容量(视在功率)或者额定功率(有功功率)
S=φ cos P (kV A / MV A ) P=水轮机额定出力×发电机效率 (kW / MW ) 发电机的容量大小更直接反映发电机的发电能力。有功功率结合功率因数才能完整反映发电机的输出功率能力。 2. 额定功率因数cos φ 发电机有功功率一定时,cos φ的减小,可以提高电力系统稳定运行的功率极限,提高发电机的稳定运行水平;同时由于增大了发电机的容量,发电机造价也增加。相反,提高额定功率因数,可以提高发电机有效材料的利用率,并可提高发电机的效率。近年来由于电力系统容量的增加,系统装设同步调相机和电力电容器来改善其功率因数,以及远距离超高压输电系统使线路对地电容增大,发电机采用快速励磁系统提高稳定性,使发电机额定功率因数有可能提高。 取值:0.8,0.85,0.875,0.9,国内大容量多取0.85~0.9,国外发达国家多取0.9~0.95。 灯泡式水轮发电机由于受结构尺寸限制,功率因数较一般水轮发电机的取值高,以减小气隙长度,提高通风冷却效果。 (1) 一般水轮发电机 GB/T7894-2009 水轮发电机基本技术条件:
电磁感应计算题复习
电磁感应计算题专题 计算题 (共15小题) 1. 如图13-17所示,两根足够长的固定平行金属导轨位于同一水平面内,导轨间的中距离为L ,导轨上横放着两根导体棒ab 和cd.设两根导体棒的质量皆m ,电阻皆为R ,导轨光滑且电阻不计,在整个导轨平面内都有竖直向上的匀强磁场,磁感强度为B 。开始时ab 和cd 两导体棒有方向相反的水平初速,初速大小分别为v 0和2v 0,求: (1)从开始到最终稳定回路中产生的焦耳热。 (2)当ab 棒的速度大小变为 4 v 时,回路中消耗的电功率。 2. 如图13-18所示,在空中有一水平方向的匀强磁场区域, 区域的上下边缘间距为h ,磁感强度为B 。有一宽度为b(b <h =、长度为L ,电阻为R 。质量为m 的矩形导体线圈紧贴磁场区域的上边缘从静止起竖直下落,当线圈的PQ 边到达磁场 下边缘时,恰好开始做匀速运动。求: (1)线圈的MN 边刚好进入磁场时,线圈的速度大小。 (2)线圈从开始下落到刚好完全进入磁场,经历的时间。 3. 水平面上两根足够长的金属导轨平行固定放置,问距为L ,一端通过导线与阻值为R 的电阻连接;导轨上放一质量为m 的金属杆(见右上图),金属杆与导轨的电阻忽略不计;均匀磁场竖直向下.用与导轨平行的恒定拉力F 作用在金属杆上,杆最终将做匀速运动.当改变拉力的大小时,相对应的匀速运动速度v 也会变化,v 与F 的关系如右下图.(取重力加速度g=10m/s 2) (1)金属杆在匀速运动之前做什么运动? (2)若m=0.5kg,L=0.5m,R=0.5Ω;磁感应强度B 为多大? (3)由v —F 图线的截距可求得什么物理量?其值为多少? 4. 如图1所示,两根足够长的直金属导轨MN 、PQ 平行放置在倾角为θ的绝缘斜面上,两导轨间距为L 0、M 、P 两点间接有阻值为R 的电阻。一根质量为m 的均匀直金属杆ab 放在两导轨上,并与导轨垂直。整套装置处于磁感应强度为B 的匀强磁场中,磁场方向垂直斜面向下,导轨和金属杆的电阻可忽略。让ab 杆沿导轨由静止开始下滑,导轨和金属杆接触 图13-17 图13-18
三相异步电动机电磁计算
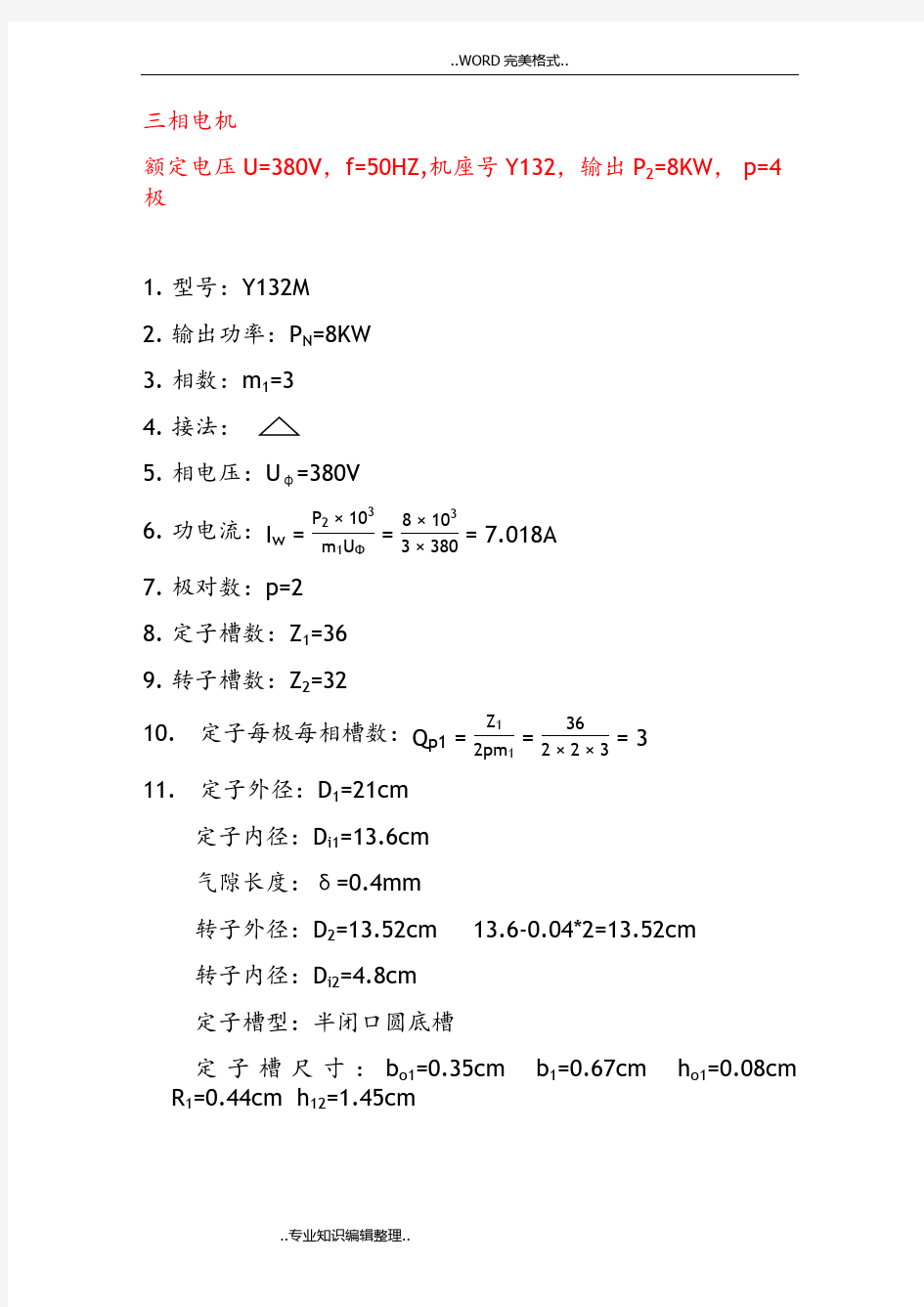
三相电机 额定电压U=380V,f=50HZ,机座号Y132,输出P2=8KW,p=4极 螈 1. 2.芄型号:Y132M 3. 4.蒂输出功率:P N=8KW 5. 6.袂相数:m1=3 7. 8.薇接法: 9. 10.莃相电压:Uφ=380V 11. 13. 14.极对数:p=2 15. 16.定子槽数:Z1=36
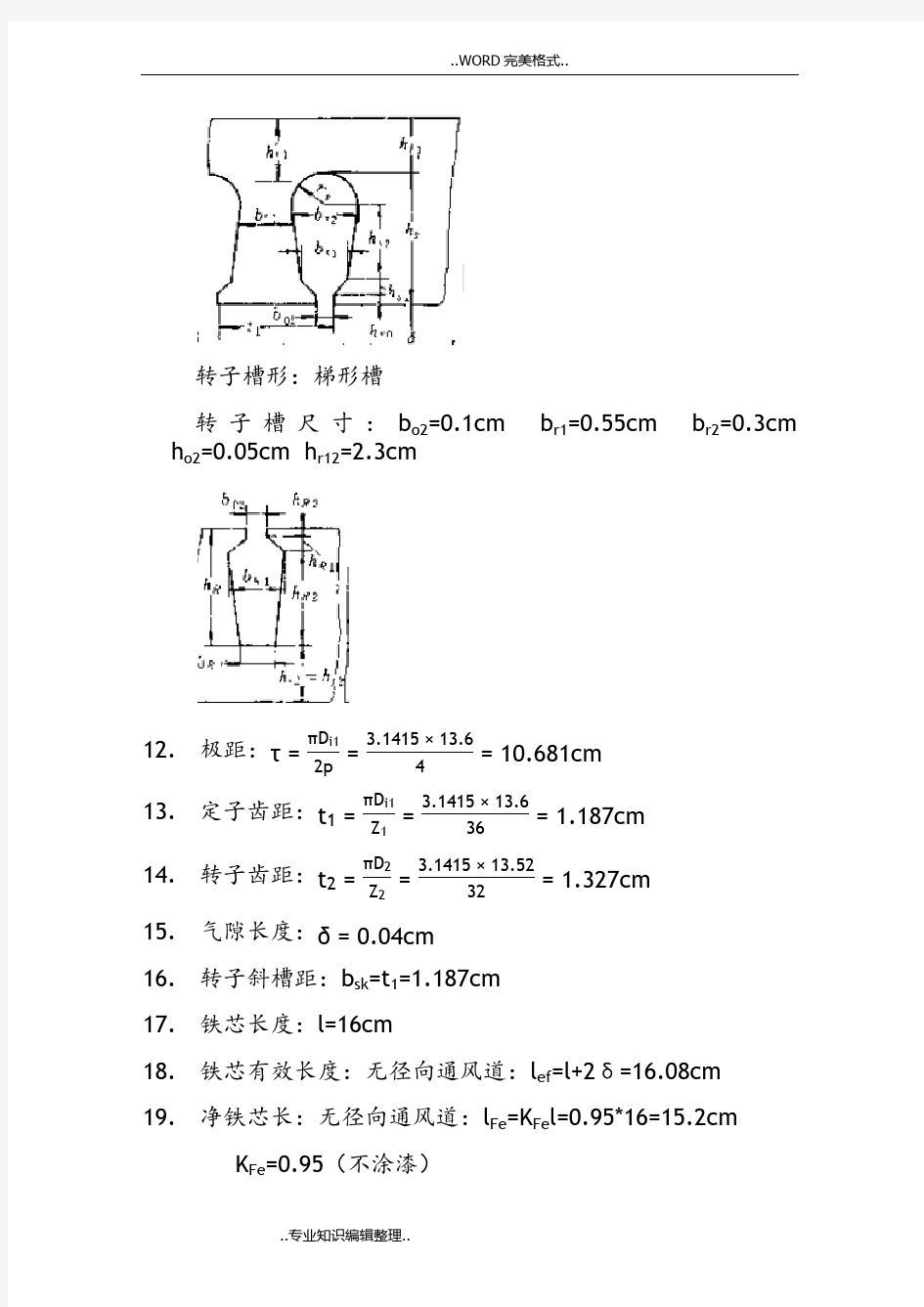
17. 18.转子槽数:Z2=32 19. 20.定子每极每相槽数: 21. 22.肂定子外径:D1=21cm D i1=13.6cm 荿定子内径: =0.4mm 蒃气隙长度:δ 转子外径:D2=13.52cm 13.6-0.04*2=13.52cm 转子内径:D i2=4.8cm 定子槽型:半闭口圆底槽 定子槽尺寸:b o1=0.35cm b1=0.67cm h o1=0.08cm R1=0.44cm h12=1.45cm 转子槽形:梯形槽 转子槽尺寸:b o2=0.1cm b r1=0.55cm b r2=0.3cm h o2=0.05cm h r12=2.3cm
23.极距: 24.定子齿距: 25.转子齿距: 26.气隙长度: 27.转子斜槽距:b sk=t1=1.187cm 28.铁芯长度:l=16cm 29.铁芯有效长度:无径向通风道:l ef=l+2δ=16.08cm 30.净铁芯长:无径向通风道:l Fe=K Fe l=0.95*16=15.2cm K Fe=0.95(不涂漆) 31.绕组型式:单层交叉式 32.并联支路数:a1=1 33.节距:1-9,2-10,11-18 34.每槽导线数:由后面计算的数据根据公式计算为: 每极磁通φ1=0.00784wb 波幅系数:K A=1.46 绕组系数:K dp1=0.96
水轮机选型设计
第六章水轮机选型设计 由于各开发河段的水力资源和开发利用的情况不同,水电站的工作水头和引用流量范围也不同,为了使水电站经济安全和高效率的运行,就必须有很多类型和型式的水轮机来适应各种水电站的要求。 水轮机由于它自身能量特性、汽蚀特性和强度条件的限制,每种水轮机适用的水头和流量范围比较窄,要作出很多系列和品种(尺寸)的水轮机,设计、制造任务繁重,生产费用和成本也大。因此有必要使水轮机生产系列化、标准化和通用化,尽可能减少水轮机系列,控制系列品种,以便加速生产、降低成本。在水电站设计中按自己的运行条件和要求选择合适的水轮机。 一、水轮机选型设计的任务及内容 1.任务 水轮机是水电站中最主要动力设备之一,影响电站的投资、制造、运输、安装、安全运行、经济效益,因此根据H、N的范围选择水轮机是水电站中主要设计任务之一,使水电站充分利用水能,安全可靠运行。每一种型号水轮机规定了适用水头范围。水头上限是根据该型水轮机的强度和汽蚀条件限制的,原则上不允许超过;下限主要是考虑到使水轮机的运行效率不至于过低。 2.内容 (1) 确定机组台数及单机容量 (2) 选择水轮机型式(型号)及装置方式 (3) 确定水轮机的额定功率、转轮直径D1、同步转速n、吸出高度H s、安装高程Z a 、飞逸转速、轴向水推力;冲锤式水轮机,还包括喷嘴数目Z0、射流直径d0等。 (4) 绘制水轮机运转特性曲线 (5) 估算水轮机的外形尺寸、重量及价格、蜗壳、尾水管的形式、尺寸、调速器及油压装置选择 (6) 根据选定水轮机型式和参数,结合水轮机在结构上、材料、运行等方面的要求,拟定并向厂家提出制造任务书,最终由双方共同商定机组的技术条件,作为进一步设计的依据。 二、选型设计 1.水轮机选型设计一般有三种基本方法 (1) 水轮机系列型谱方法: 中小型水电站水轮机选多此种方法或套用法。
电磁感应计算题专项训练及答案
电磁感应计算题专项训练 【注】该专项涉及规律:感应电动势、欧姆定律、牛顿定律、动能定理 1、( 2010重庆卷)法拉第曾提出一种利用河流发电的设想,并进行了实验研究。实验装置 的示意图如图所示,两块面积均为 S 的矩形金属板,平行、正对、竖直地全部浸在河水中, 间距为d 。水流速度处处相同,大小为 v ,方向水平。金属板与水流方向平行。地磁场磁感应强度的竖直分量为 B,水的电阻率为 p 键 K 连接到两金属板上。忽略边缘效应,求: (1) 该发电装置的电动势; (2) 通过电阻R 的电流强度; (3) 电阻R 消耗的电功率 水面上方有一阻值为 R 的电阻通过绝缘导线 和电 2、(2007天津)两根光滑的长直金属导轨 MN MN'平行置于同一水平面内,导轨间距为 I , 电阻不计。M M 处接有如图所示的电路,电路中各电阻的阻值均为 R,电容器的电容为 C 。 现有长度也为I ,电阻同为R 的金属棒ab 垂直于导轨放置,导轨处于磁感应强度为 B 方向 竖直向下的匀强磁场中。ab 在外力作用下向右匀速运动且与导轨保持良好接触,在 ab 在运 动距离为s 的过程中,整个回路中产生的焦耳热为 Q 求:⑴ab 运动速度v 的大小;⑵电容 3、( 2010江苏卷)如图所示,两足够长的光滑金属导轨竖直放置,相距为 L , 一理想电流表 与两导轨相连,匀强磁场与导轨平面垂直。一质量为 m 有效电阻为R 的导体棒在距磁场上 边界h 处由静止释放。导体棒进入磁场后,流经电流表的电流逐渐减小,最终稳定为 I 。整 个运动过程中,导体棒与导轨接触良好,且始终保持水平,不计导轨的电阻。求: ⑴磁感应强度的大小 B; ⑵ 电流稳定后,导体棒运动速度的大小 v ; ⑶ 流经电流表电流的最大值 I m 器所带的电荷量q 。
水轮发电机甩负荷定义
水轮机甩负荷定义 中文名称: 甩负荷 英文名称: load rejection 定义: 机组在运行中突然失去负荷。由于导叶来不及迅速关闭,导致机组的转速与蜗壳压力升高,而尾水管的压力则降低或真空度加大。应用学科: 电力(一级学科);水力机械及辅助设备(二级学科) 以上内容由全国科学技术名词审定委员会审定公布 甩负荷的英语对应翻译为:load shedding 甩负荷分为两种,一种是主动甩负荷:当电网提供的有功大大小于系统需要的有功,主动甩掉部分不重要的负荷,提高电网供电质量。一种是故障甩负荷,发生这种事故的原因除了电网不正常之外,发电机的主开关跳闸、汽机主汽门脱扣等都是引起该事故的原因。当电站突然甩去大量负荷时,二回路蒸汽流量急剧下降,使一回路冷却剂温度及压力迅速上升。这就是甩负荷事故。 在水电站中甩负荷是一种常见的现象。水轮发电机组发生甩负荷后,巨大的剩余能量使机组转速上升很快,调速器迅速关闭导叶,并
经过一段时间的调整,重新稳定在空载工况下运行。在甩负荷过程中,除了调节保证计算所关心的最大转速上升值和最大水击压力上升值外,还要对甩负荷动态过程品质指标的优劣进行考核。 1.1、转速上升时间:机组甩100%额定负荷后,由于剩余能量巨大,转速上升很快。正常情况下,调速器以最大速度关闭导叶到零开度,转速上升时间tM=tc+tn,其中:tc为调速器迟滞时间,取决于调速器的死区大小、机组转速的上升速率以及运行工况等,调速器在非限制条件下,tc一般大约在0.2s~0.3s。tn为调保计算中的升速时间,被定义为自导叶开始动作到最大转速所经历的时间。升速时间tn取决于水轮机主动力矩和机组惯性力矩之比,即与机组特性有关。采用比转速(ns)统计法有:为相对升速时间,τn=0.9-0.00063·ns。可以看出,相对升速时间τn随比转速的增加而减少,即低比转速、高水头水轮机相对升速时间大,高比转速、低水头水轮机相对升速时间小。T′s为导叶直线关闭时间。由于迟滞时间tc 较升速时间tn小得多,一般情况下,可将转速上升时间tm等同于调保计算中的升速时间tn看待。根据统计资料大多机组的tm=(2~6)s 。 1.2、转速下降时间(tD) 它表示机组甩负荷后,导叶直线关闭到零并一直保持到零开度(相当于机组紧急停机)情况下,自最高转速下降到空载转速区域为止的时间,或称为最快转速下降时间。在最高转速之前,机组处于水轮机工况,之后,进入制动和反水泵工况,转轮
电磁感应计算题
电磁感应计算题 1、如图所示,两根相距L平行放置的光滑导电轨道,与水平面的夹角为θ,轨道间有电阻R,处于磁感应强度为B、方向垂直轨道向上的匀强磁场中,一根质量为m 、电阻为r 的金属杆ab,由静止开始沿导电轨道下滑,设下滑过程中杆ab 始终与轨道保持垂直,且接触良好,导电轨道有足够的长度且电阻不计,求: (1)金属杆的最大速度就是多少; (2)当金属杆的速度刚达到最大时,金属杆下滑的距离为S,求金属杆在此过程中克服安培力做的功; (3)若开始时就给杆ab 沿轨道向下的拉力F使其由静止开始向下做加速度为a 的匀加速运动(a>gsinθ),求拉力F与时间t 的关系式? 2、如图所示,水平面上有两电阻不计的光滑金属导轨平行固定放置,间距d 为0、5 m,左端通过导线与阻值为2 Ω的电阻R 连接,右端通过导线与阻值为4 Ω的小灯泡L 连接,在CDEF 矩形区域内有竖直向上的匀强磁场,CE 长为2 m,CDEF 区域内磁场的磁感应强度B 随时间变化如图所示,在t =0时,一阻值为2 Ω的金属棒在恒力F 作用下由静止开始从AB 位置沿导轨向右运动,当金属棒从AB 位置运动到EF 位置过程中,小灯泡的亮度没有发生变化,求: (1)通过小灯泡的电流强度; (2)恒力F 的大小; (3)金属棒的质量。 R B a b θ θ
3.如图甲所示,电阻不计的光滑平行金属导轨相距L=0.5m,上端连接R=0、5Ω的电阻,下端连接着电阻不计的金 属卡环,导轨与水平面的夹角θ=30°.导轨间虚线区域存在方向垂直导轨平面向上的磁场,其上、下边界之间的距离S =10m,磁感应强度的B -t 图如图乙所示。长为L 且质量为m=0.5kg 的金属棒ab 的电阻不计,垂直导轨放置于距离磁场上边界d =2.5m 处,与导轨始终接触良好.在t =0时刻棒由静止释放,滑至导轨底端被环卡住不动,g 取10m/s 2,求: (1)棒运动到磁场上边界的时间; (2)棒进入磁场时受到的安培力; (3)在0—5s 时间内电路中产生的焦耳热。 4如图所示,质量为M 的导体棒ab 的电阻为r ,水平放在相距为l 的竖直光滑金属导轨上.导轨平面处于磁感应强度大小为B 、方向垂直于导轨平面向外的匀强磁场中.左侧就是水平放置、间距为d 的平行金属板.导轨上方与一可变电阻R 连接,导轨电阻不计,导体棒与导轨始终接触良好.重力加速度为g. (1)调节可变电阻的阻值为R 1=3r ,释放导体棒,当棒沿导轨匀速下滑时,将带电量为+q 的微粒沿金属板间的中 心线水平射入金属板间,恰好能匀速通过.求棒下滑的速率v 与带电微粒的质量m . (2)改变可变电阻的阻值为R 2=4r ,同样在导体棒沿导轨匀速下滑时,将该微粒沿原来的中心线水平射入金属板 间,若微粒最后碰到金属板并被吸收.求微粒在金属板间运动的时间t . 乙 t/s 1
水轮机选型设计计算书 原稿
第一章 水轮机的选型设计 第一节 水轮机型号选定 一.水轮机型式的选择 根据原始资料,该水电站的水头范围为18-34m , 二.比转速的选择 水轮机的设计水头为m H r 5.28= 适合此水头范围的有HL240和ZZ450/32a 三.单机容量 第二节 原型水轮机主要参数的选择 根据电站建成后,在电力系统的作用和供电方式, 初步拟定为2台,3台,4台三种方案进行比较。 首先选择HL240 n11=72r/min 一.二台 1、计算转轮直径 水轮机额定出力:kw N P G G r 67.66669 .0106.04 =?== η 上式中: G η-----发电机效率,取0.9 G N -----机组的单机容量(KW ) 由型谱可知,与出力限制线交点的单位流量为设计工况点单位流量,则Q 11r =1.155m 3 /s,对应的模型效率ηm =85.5%,暂取效率修正值 Δη=0.03,η
=0.855+0.03=0.885。模型最高效率为88.5%。 m H Q P D r r 09.2885 .05.28155.181.967 .666681.95 .15.1111=???== η 按我国规定的转轮直径系列(见《水轮机》课本),计算值处于标准值2m 和2.25m 之间,且接近2m ,暂取D 1=2m 。 2、计算原型水轮机的效率 914.02 46 .0)885.01(1)1(155 110max =--=--=D D M M ηη Δη=η max -ηM0=0.914-0.885=0.0.029 η=ηm +Δη=0.855+0.029=0.884 3、同步转速的选择 min /18.1972 95 .0/5.2872av 1110r D H n n =?== min /223.11855 .0884 .07210 M 0 T 11011r n n =-?=-=?)( )( ηηmin /223.73223.172n 1111r 11r n n m =+=?+= 4、水轮机设计单位流量Q11r 的计算 r Q 11= r r r H D η5 .12181.9P =884.05.28281.967.66665.12???=1.2633 m /s 5、飞逸转速的计算 r n = 1 11max D H n r =73.223×28.33=212.851r/min 6、计算水轮机的运行范围 最大水头、平均水头和最小水头对应的单位转速 min)/609.66223.18.332 180.19711max 1min 11r n H nD n =-?=?-= min)/(777.70223.195 .0/5.282180.19711av 111r n H nD n a =-?=?-=