科尔摩根AKD调试手册
(PC单独与驱动器网线连接,不要通过PLC及交换机连接)
1:设置科尔摩根的IP地址:192.168.0.90 (在驱动器上:S1设置为9,S2设定为0)
2:检测驱动器的连接线是否正确,如果正确,先给驱动器通DC24V电源,主电源先不通。打开科尔摩根调试软件WORKBENCH并且连接上驱动器。
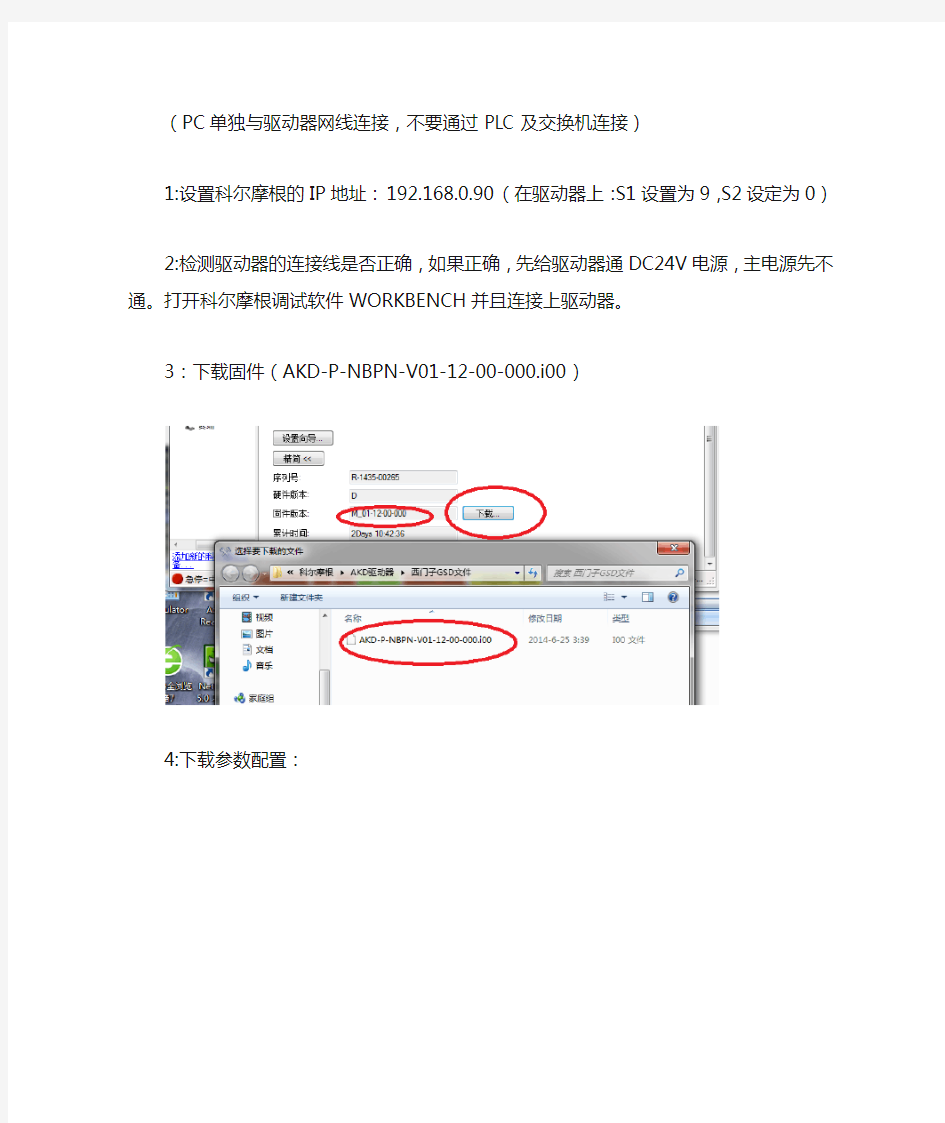
3:下载固件(AKD-P-NBPN-V01-12-00-000.i00)
4:下载参数配置:
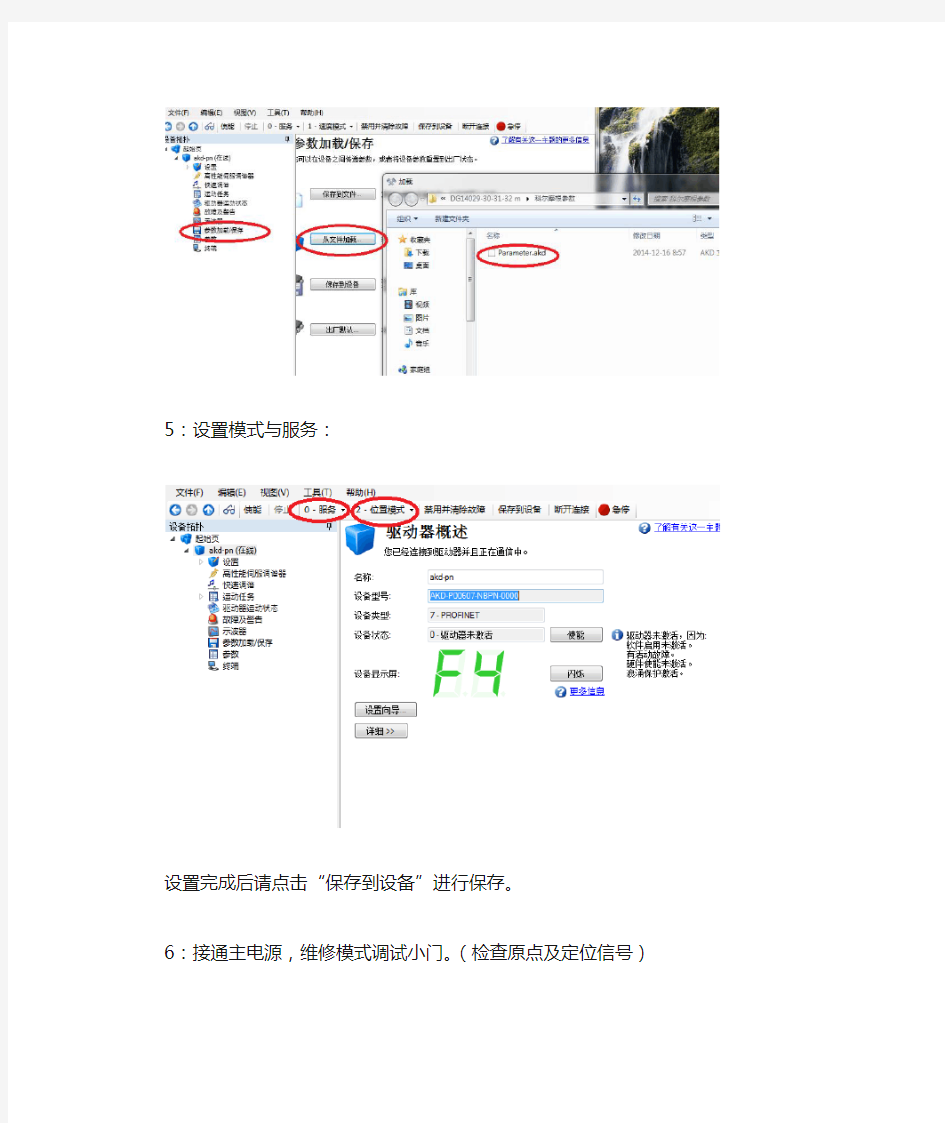
5:设置模式与服务:
设置完成后请点击“保存到设备”进行保存。
6:接通主电源,维修模式调试小门。(检查原点及定位信号)
7:在上位机的“进出料”菜单设置位置参数。(进料位置,打开位置,关闭位置,极限位置),具体的方法:1:先回原点
2:维修模式进行位置定位,将上述每个位置进行记录,填写到上位机的参数设置中。
3:手动模式运行,看每个位置是否准备定位。
MAXON MOTOR工厂车间电机的主要用途
【深度解析】工厂车间电机的主要用途 大部分工厂都拥有以大型机器或设备构成的生产线,现代对工厂也称为“制造厂”,“生产企业”。各种各样的设备采购相关信息,难免让大家眼花缭乱,但是没关系,经过小编的整理,希望大家能够对其认识更深一步! 接下来就让小编带你来看看设备采购相关的情况吧~请看下文~ 电机的分类及用途: 1、伺服电动机 伺服电动机广泛应用于各种控制系统中,能将输入的电压信号转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。 伺服电动机有直流和交流之分,较早的伺服电动机是一般的直流电动机,在控制精度不高的情况下,才采用一般的直流电机做伺服电动机。目前的直流伺服电动机从结构上讲,就是小功率的直流电动机,其励磁多采用电枢控制和磁场控制,但通常采用电枢控制。 2、步进电动机 步进电动机主要应用在数控机床制造领域,由于步进电动机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以一直被认为是较理想的数控机床执行元件。 除了在数控机床上的应用,步进电机也可以用在其他的机械上,比如作为自动送料机中的马达,作为通用的软盘驱动器的马达,也可以应用在打印机和绘图仪中。
力矩电动机具有低转速和大力矩的特点。一般在纺织工业中经常使用交流力矩电动机,其工作原理和结构和单相异步电动机的相同。 4、开关磁阻电动机 开关磁阻电动机是一种新型调速电动机,结构极其简单且坚固,成本低,调速性能优异,是传统控制电动机强有力竞争者,具有强大的市场潜力。 5、无刷直流电动机 无刷直流电动机的机械特性和调节特性的线性度好,调速范围广,寿命长,维护方便噪声小,不存在因电刷而引起的一系列问题,所以这种电动机在控制系统中有很大的应用。 6、直流电动机 直流电动机具有调速性能好、起动容易、能够载重起动等优点,所以目前直流电动机的应用仍然很广泛,尤其在可控硅直流电源出现以后。 7、异步电动机 异步电动机具有结构简单,制造、使用和维护方便,运行可靠以及质量较小,成本较低等优点。异步电动机主要广泛应用于驱动机床、水泵、鼓风机、压缩机、起重卷扬设备、矿山机械、轻工机械、农副产品加工机械等大多数工农生产机械以及家用电器和医疗器械等。 在家用电器中应用比较多,例如电扇、电冰箱、空调、吸尘器等。
安川变频器的调试及参数设置表(齐全)
第一部分变频器的操作方法 一、操作面板各部的名称: 图1 操作面板布置 二、操作键的功能: LOCAL/REMOTE:用数字操作器运行(COCAL)和用控制回路端子运行(REMOTE)切换时按下,由参数(o2-01)可设定这个键的有效/无效。 MENU:菜单键,按此键可进入参数设置。 ESC:按一下ESC键,则回到前一个状态。 JOG:操作器运行时的点动运行键。
FWD/REV:操作器运行时,运转方向切换键。 RESET:设定参数数值时,选择操作位;故障发生时,作为故障复位键。 增加键:选择方式、组、功能、参数的名称、设定值(增加)时按下此键。 减少键:选择方式、组、功能、参数的名称、设定值(减少)时按下此键。 DATA/ENTER:各模式、功能、参数、设定值确认时按下此键。RUN:操作器运行时,按下此键起动变频器。 STOP:操作器运行时,按下此键停止变频器;控制回路端子运行时,由参数(o2-01)可以设定这个键的有效/无效。 三、方式的切换 按(MENU)键,表示驱动方式,然后按、键切换方式。读取、设定各方式中参数时,按(DATA/ENTER)键。从参数的读取、设定状态返回前一状态时,按(ESC)键。具体操作如下图:
图2 方式的切换 四、操作举例 把加速时间从变更为,请按以下顺序设定参数: 五、在驱动方式下的操作 在驱动方式下,可监视频率指令、输出频率、输出电流、输出电
压、输入输出状态等及显示异常内容、异常记录等。常用监视参数:
图3 驱动方式下的操作方法 第二部分变频器的调整 确认电机旋转方向 把电梯的检修开关置于检修位置,按检修上行或检修下行按钮,电梯将以检修速度上行或下行,观察电梯的运行方向是否跟所要求的方向一致,速度是否正常。如有异常,按下表中的方法进行处理:
科尔摩根伺服报警代码中文
科尔摩根伺服报警代码(中文)
————————————————————————————————作者: ————————————————————————————————日期:
错误 编号名称说明 E /P 状态信息通电状态正常 ... 状态信息放大器是更新启动配置 - 状态信息编程模式 - S -AS-Enable AS-Enable输入0V F01* 散热片温度散热片温度过高(默认:80°C) F02* 超压供电过压 F03* 跟踪误差位置控制器 F04 信息反馈线缆坏、短路、接地 F05* 欠压供电低压 F06 电机温度电机温度过高,或传感器故障 F07 内部电压内部供应电压不行 F08* 超速度电机速度过高,位置偏移 F09 电可擦只读存储器自检错误 F10 信号失灵保护信号失灵保护(线缆坏或接触不良) F11 制动器线缆坏、短路、接地 F12电机相位电机位置丢失(线缆坏等) F13* 环境温度环境温度过高 F14 输出级输出功率错误 F15 I2t max.I2t超过最大值 F16* 电源BTB/RTO 2或3个阶段没有供电 F17 A / D转换器模数转换误差,造成极端的电磁干扰 F18重新生成回复电路故障或不正确的设置 F19* 直流母线连接直流母线连接故障 F20 槽误差槽误差,取决于类型的扩充卡(见ASCII命令参考) F21 操纵错误处理扩充卡错误 F22 保留的保留的 F23 总线通讯关闭严重的CAN总线通信的错误 F24警告显示警告故障 F25 变换误差换码误差 F26 限位开关硬件限制开关移动误差
F27AS操作错误——AS-Enable输入,使已经确定在同一时间 F28 现场总线错误现场总线错误(见ASCII命令参考) F29 现场总线错误现场总线通信干扰(见ASCII命令参考) F30 紧急暂停暂停,紧急停车 F31 保留保留 F32系统错误系统软件没有反应正确 警告信息 编号名称说明 E/P状态信息通电状态正常 . . . 状态信息放大器是更新启动配置 - S-AS-Enable AS-Enable输入0V - 状态信息编程模式 n01 I2t I2t临界值超过 n02 回复电压达到预设电压 n03* S_故障超过预置下的错误限制 n04*响应监测响应监测(现场总线)已经启动 n05 供应阶段供电相丢失 n06* SW限制开关1通过软件限制开关1 n07* SW限制开关2通过软件限制开关2 n08 运动任务误差a faulty motiontask was started n09 没有参考点no reference point(Home) set at start of motion task n10* PSTOP PSTOP限位开关激活 n11* NSTOP NSTOP限位开关激活 n12 电机加载默认值只有ENDAT或HIPERFACE,差异电机数字保存在该编码器和放大器、电机负载默 认值 n13* 扩展卡24 V直流供电为I/O扩充卡不可以 n14 SinCos反馈SinCos换向器(激发和运动)没有完成,将被取消当放大器被激活和激发和运震 动进行了 n15 保留保留 n16 总结警告总结了n31到n17警告 n17 现场总线的同步CAN同步没有登录 n18 multiturn overflow max.超过电的机转数量
安川 G7变频器调试说明
安川 G7变频器调试说明 一、变频器参数的设定方法: 1、变频器操作器上共有11个按键: 1)LOCAL/REMOTE本地与远程控制转换键; 2)MENU 选择菜单键,用来选择个模式; 3)ESC 返回键,按下此键则返回到前一个状态; 4)JOG 点动键,操作器运行时的点动运行键; 5)FWD/REV 正转/反转键,操作器运行时,切换旋转方向; 6)〉/RESET移位/复位键,选择设定参数数值的位数键,故障发生时 作为故障复位键使用; 7)∧增加键,选择模式,参数编号,设定值(增加)等等; 8)∨减少键,选择模式,参数编号,设定值(减少)等等; 9)DATA/ENTER数据/输入键,决定各模式,参数的编号,设定值; 10)RUN运行键,用操作器运行时,按此键启动变频器; 11)STOP 停止键,用操作器运行时,按此键停止变频器; 2、变频器参数的设定方法: (1)在监视界面下按下MENU键,界面显示“Operation”,连续按下MENU 键会在如下5个菜单之间来回转换: 1)Operation 驱动模式,在此模式下按下DATA/ENTER键,变频器 会回到监视界面; 2)Quick Setting QUICK程序模式,初始设定; 3)Programming ADVANCED程序模式,变频器全部参数设定; 4)Modified Consts 校验模式,已设定过的与出厂值不同的参数; 5)Auto Tuning 字学习模式,对电机参数进行自学习; (2)Quick Setting初始设定举例(设定A1-02=3 带PG矢量控制):在监视界面下按下MENU键,直至显示“Quick Setting”界面,再 按“DATA/ENTER”键,显示“A1-00=0”,再按“〉/RESET”键,此 时“00”闪动,再按“∧”键,将“00”改为“02”,再按“DATA/ENTER” 键后,将数值改为“03”,再按“DATA/ENTER”键,A1-02就被设 置成“03”即带PG矢量控制模式; (3)P rogramming参数设定举例:(设定F1-01=1024 编码器脉冲数)在监视界面下按下MENU键,直至显示“Programming”界面,再按 “DATA/ENTER”键,显示“A1-00=0”,此时“A1”闪动,再按“∧” 键,直至出现“F1-01=0”,此时“F1”闪动,再按再按“〉/RESET”
电机的选型计算
电机选型计算书 PZY 电机(按特大型车设计即重量为2500吨) 一、提升电机 根据设计统计提升框架重量为:2200kg,则总提升重量为G=2500+2200=4700kg 。设计提升速度为5-5.5米/分钟,减速机效率为0.95。 则提升电机所需要的最小理论功率: P=386.444495 .0605.58.94700=??? 瓦。 设计钢丝绳绕法示意图: 如图所示F=1/2*G ,V2=2*V1 即力减半,速度增加一 倍,所以F=2350 kg 。 根据设计要求选择电机功率应P >4444.386瓦,因为所有车库专用电机厂家现有功率P >4444.386瓦电机最小型号 5.5KW ,所以就暂定电机功率P=5.5KW ,i=60。 钢丝绳卷筒直径已确定为260mm ,若使设备提升速度到 5.5m/min 即0.09167m/s ;
由公式: D πων= 可求知卷筒转速: r D 474.1326 .014.311=?==πνω 查电机厂家资料知:电机功率:P=5.5KW 速比: i=60电机输出轴转速为ω=25r ,扭矩为M=199.21/kg ·m ,输出轴径d=φ60mm 。 则选择主动链轮为16A 双排 z=17,机械传动比为: 25474.13i 1' ==z z 54.31474 .131725z 1=?= 取从动轮16A 双排z=33; 1).速度校核: 所选电机出力轴转速为ω=25r ,机械减速比为33/17,得提升卷筒转速: r 88.1233 17251=?=ω 综上可知:提升钢索自由端线速度: min)/(52.1026.088.1214.3m D =??==πων 则提升设备速度为:v=10.52/2=5.26m/min 。 2).转矩校核: 设备作用到钢索卷筒上的力为:G/2=2350kg 。
电机参数术语
电机参数术语 其实真正系统专业的术语介绍俺也暂时没有找到,手头上介绍基本的电机拖动或电机控制的书都是简单提及。俺前段时间和MAXON公司联系过,有他们产品的介绍,上面有些相关参数,也算是半专业的术语,在这解释一下,全当给大家参考,以后买电机也可以用这些参数来参考一下卖家电机的性能。有错误之处,望网友们及时指出,不要让我害人害己。 1、Assigned power rating 。标称功率。或额定功率。只该电机系统设计设计时的理想功率也是在推荐工作情况下的最大功率。POWER RATING 为功率。 2、Nominal voltage 。额定电压。或工作电压,推荐电压。由于一般电机可以工作在不同电压下,但电压直接和转速有关,其他参数也相应变化,所以该电压只是一种建议电压。其他参数也是在这种推荐的电压下给出的。 NOMINAL 名义上的。 3、No load speed。空转速,或空载转速。单位是RPM。revolutions per minute 此处的R不是RA TE速度的意思,是REVOLUTION旋转的意思。即每分钟转多少圈。为什么不用每秒转多少圈,那俺就不知道这个典故了,希望其他网友提供。空载转速由于没有反向力矩,所以输出功率和堵转情况不一样,该参数只是提供一个电机在规定电压下最大转速的作用。一般外面给出的6000转,啊,12000转啊,多指这个参数。 4、Stall torque 堵转转矩。这个是很多要带负载的电机的重要参数。即,在电机受反向外力使其停止转动时的力矩。如果电机堵转现象经常出现,则会损坏电机,或烧坏驱动芯片,所以大家选电机时,这是除转速外,我想是第一个要考虑的参数。其单位就五花八门了。主要有N.M,有KG.M。其他则是这个两个单位的缩放,如CM,G,等。换算问题,我想就不用再说了吧。一般其值和工作电压的关系不是很密切,和工作电流的关系密切。不过请注意,堵转时间一长,电机温度上升的很快,这个值也会下降的很厉害。 5、Speed / torque gradient 速度/转矩斜率。这个参数在一般的电机介绍中很少出现,毕竟是MAXON,所以也有。如果将转速为Y轴,力矩为X轴,一般,电机先是有一个和X轴平行的线,随后有点像E的负指数形式那样下降。即转速和力矩的乘积,随力矩的上升而下降。电机制造商都推荐电机在那条和X轴平行的线范围内工作。在这个范围内,电机的电流不至于导致电机过热和烧机。 6、No load current。空载电流。或空转电流。前面说过,电流和转矩密切相关。空载电流肯定存在,其和电压的乘积形成的能量,主要分为势能和热能消耗。热能就是电机线圈的发热,越好的电机,在空载时,该值越小,而势能指克服摩擦力,和转子自身惯性的能量还有转子自身的转动势能。而一般转速一定时,转子的惯性能量增加几乎没有,而这个势能主要还是克服摩擦力的问题,而最终以热能形式耗散,所以空载电流越小,自然电机的性能越好,特别是加上减速箱的电机,空载电流越小,说明减速箱做的越好,当然,减速比越大,同样的设计方式下,阻力越大。 7、Starting current。起动电流。或初始电流。这个参数也比较重要。前面所说的转子的惯量问题在这更加体现。好的电机,在同样的加速度下,起动电流较小,而差的电机就别提了,作为小车的驱动,起动时和牛一样,根本没有赛车那种冲的感觉。MAXON的电机在这方面是他们的长项,因为他们的转子做的很好。呵呵,俺可不是他的推销员,不过他的东东确实很好,瑞士的东西确实不错。德国人的也不错,在这方面,日本和美国和他们还有得一比。而这个起动电流,对高标准的设计还是要考虑的,不然说不定起动时就会烧驱动芯片。而且这个电流往往比最大连续电流还要大出好几倍。比如MAXON的一款,最大连续电流为6A,启动电流则可能到达75A。恐怖吧。 8、Terminal resistance,电机电阻。呵呵,这个我翻译的不好,在MAXON的中文手册中是这么给的,TERMINAL为终端的意思,也可以认为是电机两输出端之间的电阻的意思。其实一样。不过大家可千万不要认为这个值除额定电压后就是空转电流。因为电机转起来还有电动势能存在。还有热能消耗。 9 Max permissible speed 最大允许转速。这个参数一般没有什么作用。因为转速是由电压控制,出现这种情况一般在两种情况下发生。一是你不老实,非要上过高的电压。二是很不幸的,外在能量带动电机,而且产生了这样的转速。而超过这个转速一般的后果是机械损坏。不过这种情况很少出现。一般的电机也没有这种参数。
安川变频器DP通讯调试步骤
安川变频器DP 通讯调试步骤 一、硬件环境: PLC:西门子31x、41x系列。 变频器:安川E1000 系列。 通讯板:安川SI-P3 DP通讯板。 通讯方式: PROFIBUS DP 通讯。 二、调试步骤: 1、硬件安装: 将安川SI-P3 通讯板加装于变频器拓展选项卡插槽内并使用螺丝紧固。(应注意拓展卡槽的功能应适用于通讯卡!),Profibus DP电缆与接头连接(注意终端电阻的设置),检查无误后进行下一步骤。 tag 1.1 tag 1.2 注:A系列的变频器通讯板安装在第二个M插口,E系列的变频器通讯板安装在第三L插口CN5-A,现场E系列的通讯板安装在第二个M插口后变频器报错(oFAOO :连接了不匹配的选购件)。 2、GSD 文件的安装: 首先基于STEP 7 V5.5安装SI-P3 的网络识别文件(GSD文件,此文件可 以从安川官方网站上下载),值得注意的是安装GSD 文件时必须新建一个新的项目,在空的configuration 下才能成功安装,具体安装步骤为:option— install GSD file.. —browse-选择GSD文件所在位置一确定一安装完成,安装方法如图 2.1 、2.2 所示。 tag 2.1
tag 2.2 3、硬件组态与配置: (1)在硬件组态编辑器中插入所用PLC的硬件并配置好,如图3.1所示; (2)在右侧选择框中找到SI-P3文件并添加至Profibus DP(1)网络中并配置DP地址(本例中地址配置为3),如图3.2所示; (3)选择SI-P3下拉菜单中的数据类型并添加至装置的组态框中(通常使用的数据类型为Extended data 1 Extended data 2和PPO通讯结构,本例中选择PPO type 4 6/6 PZD的通讯结构),如图 3.3所示。Extended data 1 Extended data 2控制方式与数据结构详见安川E1000调试手册。添加完成效果如图3.4所 示,完成后保存编译并下载完成硬件配置工作。 跑HW Config - {SIMAT1 匚400(1)(Configuratior)“ sss? 皿切Station Edit Insert PLC View Options Window Help _ □ Q%冈軸彎畫血血骷E9|栩|蛇 EF m裁t就system (1)nHHii FEOFIBUSU): EF応訓駅即訊勃(2) tag 3.1 tag 3.2 tag 3.3 tag 3.4 硬件组态完成后下载硬件,通讯连接后变频器面板COM指示灯变为绿色,
maxon电机选型手册
maxon EC motor160 maxon EC motor 2013年4月版/根据maxon标准规范的变化,我们为您提供了一个判断maxon motors最重要方面的方法。据我们所知,它涵盖了正常的应用。标准规格是我们“一般销售条件”的一部分。电气设备必须满足某些最低要求,这些要求是1996年1月1日之后引入欧洲市场的。小型电机将被视为部件,因此不代表指南意义上的单独电气设备。有关标准和指令的信息,请参阅第14页和第15页。maxon EC motor1第101号标准规范。本标准规定了在生产过程中对电动机进行的检验和试验。为了保证我们的高质量标准,我们在整个制造过程和整个电机过程中检查材料、零件和部件的特定测量和特性的符合性。记录获得的测量值,并在需要时提供给客户。随机抽样计划符合ISO 2859、MIL STD 105E和DIN/ISO 3951(属性检验、顺序抽样、变量检验)和内部制造控制。除非客户和maxon另有约定,否则本标准规范始终适用。数据2.1电气数据适用于22°至25°C,并使用带块换向的1象限控制器:数据控制在1分钟ute操作时间内执行。当电压≥3V时,测量电压为+/-0.5%,当电压≤3V时,测量电压为±0.015 V空载转速±10%空载电流≤最大规定值顺时针/逆时针旋转方向电机位置水平或垂直注:
测量电压可能与目录中列出的标称电压不同。目录中指定的空载电流是典型值,而不是最大值。按目录(或标签)连接电机时,轴从安装端顺时针旋转。通过随机抽样验证终端电阻。电感在产品认证期间确定。测试频率为1 kHz。终端电感取决于频率。这些测量完全保证了规定的机电参数。2.2外形图上的机械数据:标准测量仪器(用于电长度测量的DIN 32876、DIN 863千分尺、DIN 878千分表、DIN 862卡尺、DIN 2245孔径卡尺、DIN 2280螺纹卡尺等)2.3转子不平衡:电机转子采用空气磁通绕组,在制造过程中平衡根据我们的标准指南。对于带绕线定子齿的EC电机,转子安装在仪表上,但不作为标准平衡。在随机抽样过程中,只能对整个电机进行主观评价。2.4电气强度:每台电机完全组装好,然后根据直径在250或500 V直流电压下测试接地故障。2.5噪声:主观测试大量异常。根据速度的不同,电动机的运动会产生不同程度、频率和强度的噪声和振动。单个样品装置的噪声水平不应解释为未来交付的预测噪声或振动水平。2.6使用寿命:耐久性试验在统一的内部标准下进行,作为产品认证的一部分。EC电机的使用寿
松下三菱台达安川 西门子200w400W750W1000W1.5KW伺服电机蜗轮蜗杆减速机伺服电机扭矩计算公式
松下三菱台达安川西门子200w400W750W1000W1.5KW伺服电机蜗轮蜗杆减速机伺服电机扭矩计算公式 KS系列伺服蜗轮减速机 时间: 2011-11-16 09:48 点击: 2379 次 枫信KS精密伺服蜗轮减速机:具有间隙小、效率高、速比大、寿命长、振动低、低噪音、低温升、外观美、结构轻小、安装方便、定位精确等特点,适用于交流伺服马达、直流伺 服马达减 KS50 KS63 KS75 KS90 KS110 KS130 KS150 枫信KS精密伺服蜗轮减速机: 具有间隙小、效率高、速比大、寿命长、振动低、低噪音、低温升、外观美、结构轻小、安装方便、定位精确等特点,适用于交流伺服马达、直流伺服马达减速传动。适合于全球任何厂商所制造的驱动产品连接,如:松下、台达、安川、富士、三菱、三洋、西门子、施耐德等等。 KS精密伺服蜗轮减速机特点: 1、背隙在5-15弧分, 2、标准中心距: 50; 75; 90; 110;130;150. 3、传动比:一级:7.5-80;二级:60-500;三级:400-4000 4、输入功率:0.4KW-15KW 5、4个安装表面 6、表面光滑,外型轻小 7、低噪声,发热量小。 8、法兰可替换,可适配不同厂家的伺服电机 9、整机采用通用可替换部件组装。 产品应用: 适用于快速、精确定位机构: (1)适用于精密加工机床、印刷机械,食品机械、纺织机械,印花机械,自动化产业、工业机器人、医疗检验、精密测试仪器和自动化高精度的机电产品行业等; (2)适用于工厂自动化快速移载机构、机器人手臂抓取机构、智能立体仓库等。
KS伺服电机专用蜗轮蜗杆减速机样本下载地址:https://www.360docs.net/doc/bb13289855.html,/down/html/download/KS.rar 蜗轮蜗杆减速机型号: RV25、RV30、RV40、RV50、RV63、RV75、RV90、RV110、RV130、RV150 NRV25、NRV30、NRV40、NRV50、NRV63、NRV75、NRV90、NRV110、NRV130、NRV150 NMRV25、NMRV30、NMRV40、NMRV50、NMRV63、NMRV75、NMRV90、NMRV110、NMRV130
伺服技术
伺服系统 伺服系统,servomechanism,是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。 伺服的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。 [编辑本段] 基本概念 伺服系统是用来精确地跟随或复现某个过程的反馈控制系统。又称随动系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。 伺服系统最初用于船舶的自动驾驶、火炮控制和指挥仪中,后来逐渐推广到很多领域,特别是自动车床、天线位置控制、导弹和飞船的制导等。采用伺服系统主要是为了达到下面几个目的:①以小功率指令信号去控制大功率负载。火炮控制和船舵控制就是典型的例子。②在没有机械连接的情况下,由输入轴控制位于远处的输出轴,实现远距同步传动。③使输出机械位移精确地跟踪电信号,如记录和指示仪表等。 衡量伺服系统性能的主要指标有频带宽度和精度。频带宽度简称带宽,由系统频率响应特性来规定,反映伺服系统的跟踪的快速性。带宽越大,快速性越好。伺服系统的带宽主要受控制对象和执行机构的惯性的限制。惯性越大,带宽越窄。一般伺服系统的带宽小于15赫,大型设备伺服系统的带宽则在1~2赫以下。自20世纪70年代以来,由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,使带宽达到50赫,并成功应用在远程导弹、人造卫星、精密指挥仪等场所。伺服系统的精度主要决定于所用的测量元件的精度。因此,在伺服系统中必须采用高精度的测量元件,如精密电位器、自整角机、旋转变压器、光电编码器、光栅、磁栅和球栅等。此外,也可采取附加措施来提高系统的精度,例如将测量元件(如自整角机)的测量轴通过减速器与转轴相连,使转轴的转角得到放大,来提高相对测量精度。采用这种方案的伺服系统称为精测粗测系统或双通道系统。通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
电机说明文档(1)
目录 电机说明文档 (2) 1.直流伺服电机 (2) 1.1直流伺服电机的结构与原理 (2) 1.2实验室的直流伺服电机 (2) 1.3直流伺服驱动器 (3) 2.交流伺服电机 (5) 2.1交流伺服电机原理 (6) 2.2实验室交流伺服电机的使用 (6) 2.3交流伺服驱动器的使用 (6) 3.步进电机 (9) 3.1工作原理 (9) 3.2实验室步进电机 (9) 3.3 步进电机驱动器 (10) 4.直流无刷电机 (11) 4.1直流无刷电机原理 (11) 4.2 实验室直流无刷电机 (11) 4.3 直流无刷驱动器 (12)
电机说明文档 《现代机电控制》实验在电机部分,选取了目前最为常用的电机:直流伺服电机,交流伺服电机,步进电机和直流无刷电机。下面就每种电机原理、结构、物理连接、工作方式进行说明,旨在知道学生快速掌握电机的基本知识。 1.直流伺服电机 1.1直流伺服电机的结构与原理 直流伺服电机特指直流有刷电机,由磁极(定子),电枢(转子),电刷和换向器 等三大部分组成,如图1.1所示: 图1.1 直流伺服电机结构原理 基本原理是线圈通电在磁场中产生安培力,带动线圈切割磁力线,当加在线圈的电压,反电动势和电阻分压达到平衡时,线圈转速保持不变。对于他励直流伺服电机,通电时,有以下方程: 电磁转矩: 感应电动势与转速: 电枢回路电压方程:(式 1.1) :电磁转矩:常数,与电机结构有关:线圈中电流:感应电动势:常数,与电机结构有关:转速:磁通量 通过式1.1,建立直流电机转速关系为: (式1.2) 1.2实验室的直流伺服电机 实验室使用到的直流伺服电机为maxon DC 直流伺服电机,如图1.2所示。 图1.2 Maxon DC motor 该电机有两根电源线(红接24V,黑接地),编码器为常用的10pin编码器,如图
maxon电机选型手册
1214400 13700 12800 13800 156 124 82.9 72.7 8250 7490 6960 8080 2.25 2.25 2.33 2.26 0.907 0.716 0.467 0.37 4.61 5.25 5.39 5.76 1.7 1.44 0.929 0.801 50 49 49 49 5 ... 15 5 ... 15 5 ... 15 5 .. 。15 3.06 3.87 6.21 7.73 3130 2470 1540 1230 2440 2580 2480 2510 10.9 11.6 11.1 11.3 0.428 0.428 0.428 0.428 14400-44700 11300-35200 6840-21800 5360-17400 1:120000 5000 10000 15000 2.0 1.0 2.0 4.0 6.0 6.0 320817 1.5 0.5 320816 320817 320818 320819 320817 23.5 -40…+ 85C + 100C maxonEC电机0.14mm,2014年5月版更改库存程序标准程序特殊程序要求)零件号规格工作范围注释[rpm]上面列出的连续运行热阻(连续运行最大)在此期间达到的最高允许绕组温度为25线环境温度25线(热极限)。电动机的短期运行可能会暂时过载)Maxon指定的功率额定值模块化系统概述第20页25EC-max 16 2线制16毫米,无刷,瓦特额定电压标称电压标称电压负载速度rpm负载电流mA额定速度rpm标称转矩(最大连续转矩)mNm额定电流(最大连续电流)c恒定转矩mNm恒定电流最大效率特性35型控制36电源电压+ VCC 12转矩恒定mNm / A 13速度恒定rpm / V 14速度/转矩梯度rpm / mNm 15机械时间常数ms 16转子惯性gcm 39
科尔摩根案例
每分钟生产高达450个泡罩 ——PLC、运动控制、驱动器三合一:用于PG Express的整套解决方案 图1印度IMA- PG公司除了生产线最终包装外,还提供包括盒装、旋转式真空成型、旋 转密封、平面密封、管填充等应用中所需机器的完整解决方案。 科尔摩根以无与伦比的创新和激情,致力于推动印度机器制造业的发展。从未止步于过去的成功,科尔摩根通过持续不断的改进,以确保其产品和解决方案的可靠性和质量。随着各种技术创新产品的推出,科尔摩根大大加强了其在包装和金属成型领域的实力。 为了不断追求卓越,科尔摩根为印度IMA-PG公司的PG-Express机器提供了整套的自动化解决方案。IMA-PG印度私营有限公司作为印度热成型机领域的先驱,在1978年推出了第一台机器。如今,它因提供创新的工程解决方案以满足不断变化的需求而备受业界推崇,印度IMA-PG公司除了生产线终端包装外,还提供包括盒装、旋转式真空成型、旋转密封、平面密封、管填充等机器应用中所需的完整解决方案。科尔摩根与IMA-PG的合作始于两年前,并为其提供自动化解决方案,包括运动控制器、人机界面、伺服驱动器、伺服电机、输入/输出模块等产品。凭借世界一流的运动技术、行业领先的质量,及其在连接、集成标准和定制产品方面精湛的专业知识,科尔摩根为OEM机器制造商创造竞争优势,助其走向成功。PG Express的背景 PG Express是一种用于形成泡罩的泡罩包装机,泡罩用来包装药片(有10片、4片、5片、1片等) 。IMA-PG在三到四年前就生产了该类机器,但PG Express是科尔摩根首次为其提供整套自动化解决方案,是一种用于分度、送料和冲压泡罩的三轴机器。该机器主要的操作流程包括泡罩成型、装药片、封泡罩,最后是切割泡罩。科尔摩根已通过卓越的系统性能提高了该机器的速度,实现每分钟生产高达450个泡罩。然而,OEM提出了温度控制方面的新挑战,由于封口依赖于有效的温度控制,因此这一点至关重要。如果温度控制不当,最终会影响泡罩的质量,以致无法在市场中出售。 自始至终的可靠性 当OEM机器制造商咨询该问题时,科尔摩根很快作出了反应,还安装了一个用于控制温度的内置功能,其速度快于外部控制器速度约15倍。这不仅节省了安装额外PID控制器的成本,更重要的是,有效地提升了性能并减少了浪费。 该程序通过AKD PDMM控制器进行控制。这是一款集成了PLC功能的基于驱动器的运动控制器,同时也是专为包装机设计的紧凑型产品。AKD PDMM将高性能PLC和运动控制集成到技术领先的机器中。该集成式运动控制器可在250微秒的周期时间内同步8个轴,并且支持从简单的点到点定位,到直线和圆弧插补的各种运动控制功能。PDMM可为整个包装机提供PLC逻辑、温度控制、运动控制、人机界面控制和驱动控制。 为了让编程拥有最大的灵活性和自由度,科尔摩根自动化组件(Kollmorgen Automation Suite?)将PLC逻辑、HMI编程、运动控制和驱动控制集成在一起,编程语言符合IEC 61131-3标准。为了让机器对用户更友好,OEM机器制造商可使用科尔摩根独有的管状图(Pipe NetworkTM) 编程环境来开发简洁高效的软件。用户可在短短10天内完成竞争对手的同类产品需45天才能完成的软件开发,从而节省了宝贵的时间和成本。通过管状图(Pipe Network ?),用户只需确定软件中相应的运动模块就能省去机器中的机械部件(如齿轮及凸轮)。这一编程环境极为实用、易于操作、便于排查问题。用户只需拖拽图标行程方案,并最终根据要求连接到机器中即可。所有必要的互连均可在程序中自动完成。对程序员和终端用户而言,
安川变频器DP通讯调试步骤
安川变频器DP通讯调试步骤 一、硬件环境: PLC:西门子31x、41x系列。 变频器:安川E1000系列。 通讯板:安川SI-P3 DP通讯板。 通讯方式:PROFIBUS DP通讯。 二、调试步骤: 1、硬件安装: 将安川SI-P3通讯板加装于变频器拓展选项卡插槽内并使用螺丝紧固。(应注意拓展卡槽的功能应适用于通讯卡!),Profibus DP电缆与接头连接(注意终端电阻的设置),检查无误后进行下一步骤。 tag 1.1
tag 1.2 注:A系列的变频器通讯板安装在第二个M插口,E系列的变频器通讯板安装在第三L插口CN5-A,现场E系列的通讯板安装在第二个M插口后变频器报错(oFA00:连接了不匹配的选购件)。 2、GSD文件的安装: 首先基于STEP 7 V5.5 安装SI-P3 的网络识别文件(GSD文件,此文件可以从安川官方网站上下载),值得注意的是安装GSD文件时必须新建一个新的项目,在空的configuration下才能成功安装,具体安装步骤为:option—install GSD file.. —browse—选择GSD文件所在位置—确定—安装完成,安装方法如图2.1、2.2所示。
tag 2.1 tag 2.2 3、硬件组态与配置: (1)在硬件组态编辑器中插入所用PLC的硬件并配置好,如图3.1所示; (2)在右侧选择框中找到SI-P3文件并添加至Profibus DP(1)网络中并配置DP地址(本例中地址配置为3),如图3.2所示;
(3)选择SI-P3下拉菜单中的数据类型并添加至装置的组态框中(通常使用的数据类型为Extended data 1、Extended data 2和PPO 通讯结构,本例中选择PPO type 4 6/6 PZD的通讯结构),如图3.3所示。Extended data 1、Extended data 2控制方式与数据结构详见安川E1000调试手册。添加完成效果如图3.4所示,完成后保存编译并下载完成硬件配置工作。 tag 3.1 tag 3.2
在伺服系统选型及调试中,常会碰到惯量问题
在伺服系统选型及调试中,常会碰到惯量问题。其具体表现为:在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。 一、什么是“惯量匹配”? 1、根据牛顿第二定律:“进给系统所需力矩T = 系统传动惯量J × 角加速度θ角”。加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。如果θ变化,则系统反应将忽快忽慢,影响加工精度。由于马达选定后最大输出T值不变,如果希望θ的变化小,则J应该尽量小。 2、进给轴的总惯量“J=伺服电机的旋转惯性动量JM +电机轴换算的负载惯性动量JL。负载惯量JL由(以平面金切机床为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴上的惯量组成。 JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。如果希望J 变化率小些,则最好使JL所占比例小些。这就是通俗意义上的“惯量匹配”。 二、“惯量匹配”如何确定? 传动惯量对伺服系统的精度,稳定性,动态响应都有影响。惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。不同的机构,对惯量匹配原则有不同的选择,且有不同的作用表现。不同的机构动作及加工质量要求对JL与JM大小关系有不同的要求,但大多要求JL与JM的比值小于十以内。一句话,惯性匹配的确定需要根据机械的工艺特点及加工质量要求来确定。对于基础金属切削机床,对于伺服电机来说,一般负载惯量建议应小于电机惯量的5倍。 惯量匹配对于电机选型很重要的,同样功率的电机,有些品牌有分轻惯量,中惯量,或大惯量。其实负载惯量最好还是用公式计算出来。常见的形体惯量计算公式在以前学的书里都有现成的(可以去查机械设计手册)。我们曾经做过一试验,在一伺服电机的轴伸,加一大的惯量盘准备用来做测试,结果是:伺服电机低速时停不住,摇头摆尾,
电机参数术语一览
电机参数术语一览 1、Assignedpowerrating。标称功率。或额定功率。只该电机系统设计设计时的理想功率也是在推荐工作情况下的最大功率。POWERRATING为功率。 2、Nominalvoltage。额定电压。或工作电压,推荐电压。由于一般电机可以工作在不同电压下,但电压直接和转速有关,其他参数也相应变化,所以该电压只是一种建议电压。其他参数也是在这种推荐的电压下给出的。 NOMINAL名义上的。 3、Noloadspeed。空转速,或空载转速。单位是RPM。revolutionsperminute此处的R 不是RATE速度的意思,是REVOLUTION旋转的意思。即每分钟转多少圈。为什么不用每秒转多少圈,那俺就不知道这个典故了,希望其他网友提供。空载转速由于没有反向力矩,所以输出功率和堵转情况不一样,该参数只是提供一个电机在规定电压下最大转速的作用。一般外面给出的6000转,啊,12000转啊,多指这个参数。 4、Stalltorque堵转转矩。这个是很多要带负载的电机的重要参数。即,在电机受反向外力使其停止转动时的力矩。如果电机堵转现象经常出现,则会损坏电机,或烧坏驱动芯片,所以大家选电机时,这是除转速外,我想是第一个要考虑的参数。其单位就五花八门了。主要有N.M,有KG.M。其他则是这个两个单位的缩放,如CM,G,等。换算问题,我想就不用再说了吧。一般其值和工作电压的关系不是很密切,和工作电流的关系密切。不过请注意,堵转时间一长,电机温度上升的很快,这个值也会下降的很厉害。 5、Speed/torquegradient速度/转矩斜率。这个参数在一般的电机介绍中很少出现,毕竟是MAXON,所以也有。如果将转速为Y轴,力矩为X轴,一般,电机先是有一个和X轴平行的线,随后有点像E的负指数形式那样下降。即转速和力矩的乘积,随力矩的上升而下降。电机制造商都推荐电机在那条和X轴平行的线范围内工作。在这个范围内,电机的电流不至于导致电机过热和烧机。 6、Noloadcurrent。空载电流。或空转电流。前面说过,电流和转矩密切相关。空载电流肯定存在,其和电压的乘积形成的能量,主要分为势能和热能消耗。热能就是电机线圈的发热,越好的电机,在空载时,该值越小,而势能指克服摩擦力,和转子自身惯性的能量还有转子自身的转动势能。而一般转速一定时,转子的惯性能量增加几乎没有,而这个势能主要还是克服摩擦力的问题,而最终以热能形式耗散,所以空载电流越小,自然电机的性能越好,特别是加上减速箱的电机,空载电流越小,说明减速箱做的越好,当然,减速比越大,同样的设计方式下,阻力越大。 7、Startingcurrent。起动电流。或初始电流。这个参数也比较重要。前面所说的转子的惯量问题在这更加体现。好的电机,在同样的加速度下,起动电流较小,而差的电机就别提了,作为小车的驱动,起动时和牛一样,更本没有赛车那种冲的感觉。MAXON的电机在这方面是他们的长项,因为他们的转子做的很好。呵呵,俺可不是他的推销员,不过他的东东确实很好,瑞士的东西确实不错。德国人的也不错,在这方面,日本和美国和他们还有得一比。而这个起动电流,对高标准的设计还是要考虑的,不然说不定起动时就会烧驱动芯片。而且这个电流往往比最大连续电流还要大出好几倍。比如MAXON的一款,最大连续电流为6A,启动电流则可能到达75A。恐怖吧。 8、Terminalresistance,电机电阻。呵呵,这个我翻译的不好,在MAXON的中文手册中是这么给的,TERMINAL为终端的意思,也可以认为是电机两输出端之间的电阻的意思。其实一样。不过大家可千万不要认为这个值除额定电压后就是空转电流。因为电机转起来还
滚珠丝杠选型计算
滚珠丝杆伺服选型 惯量匹配,伺服扭矩计算,在线,下载滚珠丝杆设计,伺服系统丝杠螺母传动负载扭矩的折算公式,滚珠丝杆负载惯量,丝杆扭矩计算公式,婊氱彔涓濇潌閫夊瀷,滚珠丝杆扭矩计算,水平丝杆扭矩,伺服电机选型时的扭矩计算,丝杆传动负载惯量如何计算推导,200KG走丝杆水平移动需要多大扭力,伺服坐标是怎样计算的,惯量匹配计算实例,滚珠丝杆的水平惯量,丝杆加速度的计算,伺服电机带丝杆后扭矩计算,滚珠丝杆选型滚珠丝杆螺母副的调节安装和防护数控资料第02章数控机床机械结构.pdf 螺杆泵特点和具体使用丝杠支撑轴承,FAG精密主轴轴承,INA直线导轨RUE、KUVE、KUSE等系列滑块RUS系列轻钢龙骨吊顶滾珠導螺杆滚珠丝杆定义及功能丝杆升降机螺杆泵丝杠减速机选择滚珠丝杆的选择计算第二章机械系统部件的选择与设计2、对机台的培训课程了解《X-Y设计》说明书数控机床进给系统加工设备之双螺杆滚珠丝杠扭转变形对机电综合传动刚度的影响Kral 三螺杆泵 伺服的选型伺服系统由伺服驱动器和伺服电机组成,其中最关键的又是伺服电机的确定,伺服电机型号的确定可以通过下列方法:1. 电机最大转速>系统所需之最高移动转速。2. 电机的转子惯量与负载惯量相匹配。3. 连续负载工作扭力≤电机额定扭力 4. 电机最大输出扭力>系统所需最大扭力(加速时扭力)扭矩、总结:扭矩、速度达到系统要求,转子惯量与负扭矩速度达到系统要求,载惯量相匹配。载惯量相匹配。 选型计算1. 扭矩计算连续负载工作扭矩(TL);加速时扭矩(TS);2. 速度计算负载端转速;电机端转速;3. 惯量匹配计算(JL/JM)扭矩和速度计算电机扭矩计算包括负载扭矩TL和启动扭矩TS,T=(TL+TS) *S,S: 安全系数。TL:克服外力所需要的力矩,跟机械结构有关,如果是水平运动时主要是克服摩擦力,垂直运动时还要克服重力等的影响。TS: 启动需要的扭矩,也就是产生加速度所需要的扭矩,根据公式Ts=Jβ J = 电机转子惯量和负载惯量折算到电机轴的惯量的和β =电机轴角加速度。计算TS的关键为惯量的计算。惯量的计算转动惯量的定义:各质点的质量与该质点到转轴距离平方乘积之和,为描述转动惯性大小的物理量。定义公式:J=∑mipi2,单位:kgm2 圆柱体惯量计算:实心圆柱体:JK= (π/32)ρLD4=0.5MR2 空心圆柱体:JK= (π/32)ρL(D04-D14)=0.5M(R02-R12) 各种传动机构下负载的惯量计算下面是几种常见传动方式下负载的惯量计算。一. 直接驱动JT:负载折算到电机转子的总惯量JL:负载惯量;JM:电机转子惯量JT = JL+JM 二. 皮带输送传动JT:负载折算到电机转子的总惯量JL:负载惯量;JM :电机转子惯量M:负载和皮带的质量和;R:皮带轮半径;JP:皮带轮惯量JL= M*R2 ;JT = JL + JP + JM 三. 丝杆传动P: 螺距,M: 负载的质量,JB是丝杆惯量JL = M(P/ 2π )2 ;JT = JL + JM + JB 四.齿轮传动JL :负载的惯量,n:齿轮传动比,JM :电机转子惯量JT = JL /n2 + JM 下面结合例子讲解如何计算扭据。下面结合例子讲解如何计算扭据。 例子1 例子滚珠丝杆传动物体运动速度要求V=5.0m/min; 滑动部分质量:M=50Kg 丝杆长度LB=1.4m; 丝杆直径DB=0.012m; 丝杆导程PB=0.01m; 联轴器质量Mc=0.2Kg 联轴器外径DC=0.04m; 磨擦系数:u =0.3 加速时间t0 =0.1s; 机械效率n=0.9 则计算过程如下:(1) 电机转速:N=V/PB=5.0/0.01=500(rpm) (2) 克服磨擦力需要的扭矩: f PB=TL 2πη, f -摩擦力f=Mg TL=MgPB/(2πη)=50x9.8x0.3x0.01/(2πx0.9)=0.26N.m (3)根据前面的计算公式得出负载惯量为水平直线运动负载JLM=M(PB/ 2π )2 =50x(0.01/2π )2 =1.26x10-4(Kg.m2 ) 滚珠丝杆JB=0.224x10-4 (Kg.m2 )按圆柱体的方式计算联轴器JC=0.4x10-4(Kg.m2 ) 负荷惯