CSDY1型射流管电液伺服阀

电液伺服阀基础知识介绍
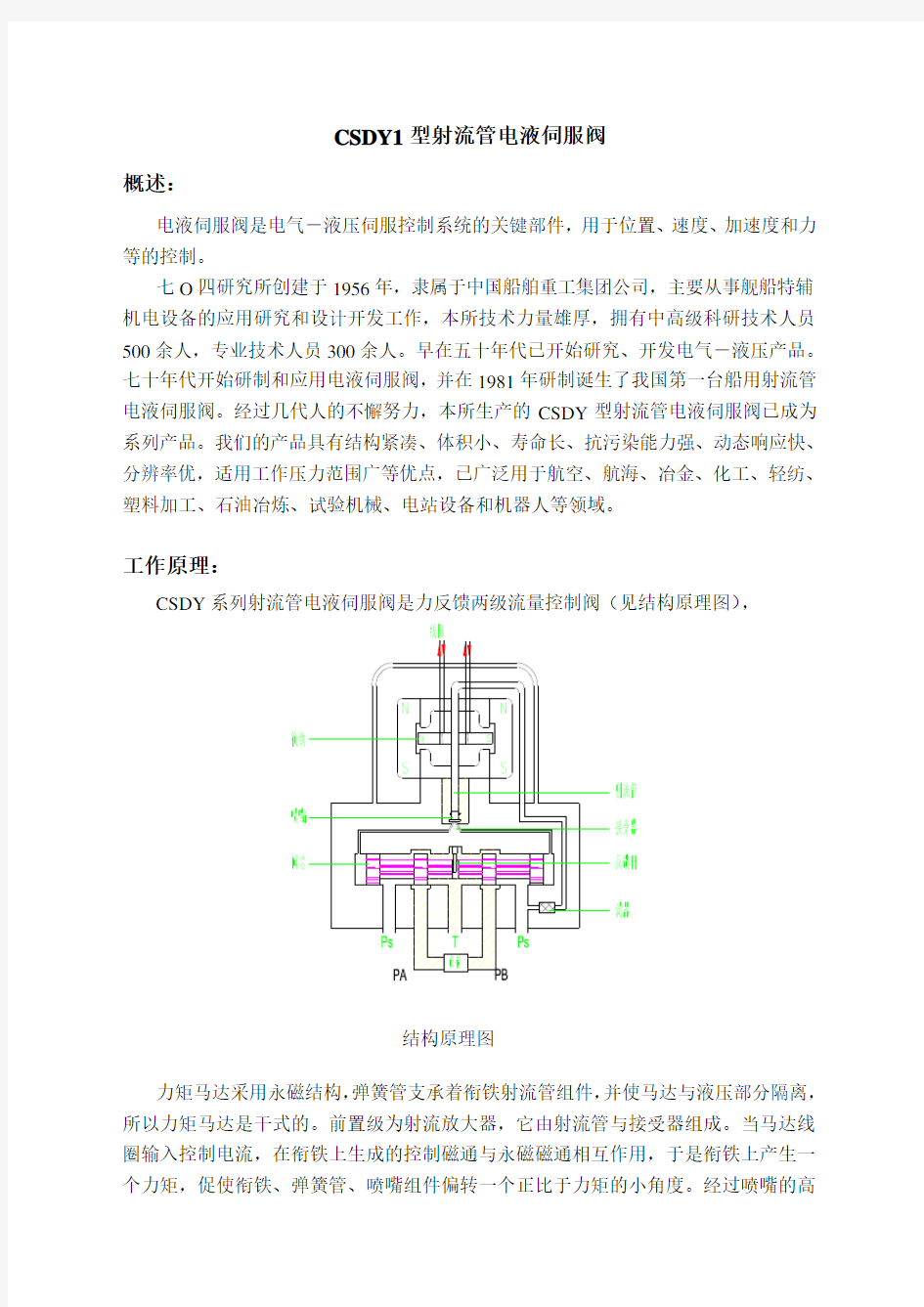
电液伺服阀基础知识介绍 射流管式电液伺服阀与喷嘴挡板式电液伺服阀是目前世界上运用最普遍的典型两级流量控制伺服阀。博格公司的DSHR一级先导就是射流管阀,而派克公司的TDL一级先导就是喷嘴挡板阀,下面对两种阀的结构、工作原理及特点作个比较与介绍。并着重分析了射流管式伺服阀在可靠性及工作性能方面的一些优势。 工作原理: ★喷嘴挡板式伺服阀的原理:TDL 图1 为喷嘴挡板式伺服阀的原理图。它主要由力矩马达、喷嘴挡板式液压放大器、滑阀式功率级及反馈杆组件构成。其工作过程为:输入到力矩马达线圈的电气控制信号在衔铁两端产生磁力,使衔铁挡板组件偏转。挡板的偏移将一侧喷嘴挡板可变节流口减小,液流阻力增大,喷嘴的背压升高;而另一侧的可变节流口增大,液流阻力减小,液流的背压降低。这样可得到与挡板位置变化相对应的喷嘴背压,此背压加到与与喷嘴腔相通的阀芯端部,推动阀芯移动。而阀芯又推动反馈杆端部的小球,产生反馈力矩作用在衔铁挡板组件上。当反馈力矩逐渐等于电磁力矩时,衔铁挡板组件被逐渐移回到对中的位置。于是,阀芯停留在某一位置。在该位置上,反馈杆的力矩等于输入控制 电流产生的的力矩,因此,阀芯位置与输入控制电流大小成正比。当供油压力及负载压力为一定时,输出到负载的流量与阀芯位置成正比。 图1双喷嘴挡板式力反馈电液流量伺服阀
★射流管式伺服阀的原理: 图2 为射流管式伺服阀的原理图。力矩马达采用永磁结构,弹簧管支承着衔铁射流管组件,并使马达与液压部分隔离,所以力矩马达是干式的。前置级为射流放大器,它由射流管与接受器组成。当马达线圈输入控制电,在衔铁上生成的控制磁通与永磁磁通相互作用,于是衔铁上产生一个力矩,促使衔铁、弹簧管、喷嘴组件偏转一个正比于力矩的小角度。经过喷嘴的高速射流的偏转,使得接受器一腔压力升高,另一腔压力降低,连接这两腔的阀芯两端形成压差,阀芯运动直到反馈组件产生的力矩与马达力矩相平衡,使喷嘴又回到两接受器的中间位置为止。这样阀芯的位移与控制电流的大小成正比,阀的输出流量就比例于控制电流。 图2 射流管式力反馈电液流量伺服阀 ★两种阀的主要特点: 射流管式与喷嘴挡板式最大差别在于喷嘴挡板式以改变流体回路上所通过的阻抗来进行力的控制。相反,射流管式是靠射流喷嘴喷射工作液,将压力能变成动能,控制两个接受孔获得能量的比例来进行力的控制。这种方式的阀与喷嘴挡板式相比因射流喷嘴大,由污粒等工作液中杂物引起的危害小,抗污染能力强。且射流管式液压放大器的压力效率及容积效率高,一般为70%以上,有时也可达到90%以上的高效率。输出控制力(滑阀驱动力)大,进一步提高了抗污染能力。同样其灵敏度、分辨率及低压工作性能大大优于喷嘴挡板阀。另外,由于射流管式由于在喷嘴的下游进行力控制,当喷嘴被杂物完全堵死时,因两个接受孔均无能量输入,滑阀阀芯的两端面也没有油压的作用,反馈弹簧的弯曲变形力会使阀芯回到零位上,伺服阀可避免过大的流量输出,具有“失效对中”能力,并不会发生所谓的“满舵”现象。但射流管式液压放大器及整个阀的性能不易理论
电液伺服阀的发展趋势与现状
电液伺服阀与比电液例阀的研究现状与发展趋势 摘要:电液比例阀是电液比例控制技术的核心元件,它按照输入电信号指令,连续成比例地控制液压系统的压力、流量或方向等参数。电液伺服阀是电液伺服控制系统中的关键元件。二者均在电液比例系统以及电液伺服系统中起到重要作用。本文中以电液比例换向阀和电液伺服阀为例详细介绍了其工作原理,并从性能、方展、前景等方面分别对两类阀进行了阐述,使我们对其有了更深刻的认识。 关键词:电液比例阀;电液比例换向阀;电液伺服阀;现状;趋势 1 引言 液压工业己成为全球性的工业,国际液压界一些著名公司如美国的派克汉尼汾公司(PARKER HANNIFIN)、德国的力士乐(REXROTH)和博世公司(BOSCH)等居世界领先地位,我国液压工业距国外还有一定的差距。 现代液控技术始于第一次世界大战后。今天,机电一体化的进程对液控技术提出了更多的需求,而计算机技术和控制理论的发展则为液压技术注入了新的动力。电液比例阀与电液伺服阀作为液压系统中的重要控制元件,分别代表了电液比例技术与电液伺服技术的发展情况。电液伺服阀与电液比例阀的出现使液压系统与现代化的电子技术结合的更加紧。 电液比例阀,是电液比例控制技术的核心和主要功率放大元件,代表了流体控制技术的发展方向[ 1 ] 。它以传统的工业用液压控制阀为基础,采用电- 机械转换装置,将电信号转换为位移信号,按输入电信号指令连续、成比例地控制液压系统的压力、流量或方向等参数。 电液伺服阀不仅能够实现微小电气信号向大功率液压信号(流量与压力)的转换,还可以根据输入电信号的大小,成比例地输出相应的流量和压力。因此,在电液伺服系统中,电液伺服阀将电气部分与液压部分连接起来,实现整个系统的控制策略和执行元件的动作。所以,电液伺服阀的性能,特别是其电液伺服阀的动特性和稳定性,直接影响到整个液压系统乃至机械设备的可靠性和寿命。电液伺服阀的发展史就是一部力图获得速度更快、精度更高、稳定性更好的创新史[ 2 ]。 2 发展历史 2.1电液伺服阀发展历史 最早使用液压伺服技术的机构也许已经湮灭在浩瀚的历史长河中。直到1750 年左右,用于控制给水系统和蒸汽锅炉水位的液位控制阀在英国出现。随着工业革命的发展,控制策略的不断改进, 进而影响到液压技术的发展。在二战前夕,由于空气动力学的应用要求一种能够实现机械信号与气体信号转换装置。在二战末期,伺服阀是采用滑阀阀芯在阀套中移动的结构。阀芯的运动是直流螺线管产生的电磁力与弹簧产生的压力共同作用的结果,因此,此时的伺服阀还仅仅是一种单级开环控制阀。二战结束后,电液伺服阀开发研制进入了迅速发展时期,很多结构设计进一步提高了电液伺服阀的性能。特别是1960年的电液伺服阀设计更多地显示出了现代伺服阀的特点。如:两级间形成了闭环反馈控制;力矩马达更轻移动距离更小;前置级对功率级的压差通常可达到50%以上;前置级无摩擦并且与工作油液相互独立;前置级的机械对称结构减小了温度、压力变化对零位的影响。
CSDY1射流管电液伺服阀产品说明书
CSDY1射流管电液伺服阀 产品说明书 编制: 校对: 审核: 审定: 九江仪表厂 一九八九年十二月
CSDY1射流管电液伺服阀产品说明书 一、概述: CSDY1系列射流管电液伺服阀是力反馈型两级流量伺服控制阀,具有性能良好,抗污染能力强,安全可靠以及寿命长的突出特点,适用于电液伺服系统的位置、速度、加速度和力的控制。 二、结构原理: 图1是CSDY1系列射流管电液伺服阀的原理图,力矩马达采用永磁力矩马达,由两个永久磁钢产生极化磁通,衔铁两端伸入磁通回路的空气隙中,弹簧管一端固定在壳体上,另一端固定在衔铁组件的钢套中。反馈弹簧组件的一端固定在射流管喷嘴上,反馈杆被夹牢在阀芯的中心位置。 高压油连续地从供油腔Ps通过滤油器及固定节流孔,到射流管喷嘴向两个接受孔喷射,接受孔分别与阀芯两端控制腔相通。 当力矩马达线圈组件输入控制电流时,由于控制磁通和极化磁通的相互作用,在衔铁上产生一个力矩,该力矩使衔铁组件绕弹簧管旋转,从而使射流管喷嘴运动导致两个接受孔腔产生压差引起阀芯位移,且一直持续到由反馈弹簧组件弯曲产生的反馈力矩与控制电流产生的控制力矩相平衡为止。 由于阀芯位移与反馈力矩成比例,控制力矩与控制电流成比例,伺服阀的输出流量与阀芯位移成比例,所以伺服阀的输出流量与输入的指令控制电信号亦成比例,若给伺服阀输入反向电控信号,则伺服阀就有反向流量输出。 三、技术性能指标:
1、供油压力范围(MPa) 2.1~31.5 2、额定供油压力(MPa)20.6 3、额定流量(L/min)2—40(按用户要求) 4、滞环(%)≤3 ≤5(用于低频控制系统) 5、分辨率(%)≤0.25 6、线性度(%)≤7.5 7、对称度(%)≤10 8、压力增益(%Ps/1%In)≥30 9、静耗流量(L/min)≤0.45+3%Qn 10、零偏(%)≤2 11、幅频宽(-3Db)(HZ) ≥70 ≥40(用于低频控制系列) 12、相频宽(-90°)(HZ)≥90 四、线圈连接方法: 伺服阀线圈的连接方法,插销头标号,外引出线颜色及控制电流的极性等参照下表和射流管电液伺服阀安装图(图2)
电液伺服阀论述
电液伺服阀论述 1.概述 电液伺服阀是电液伺服系统中的核心元件。它既是电液转换元件,又是功率放大元件。在系统中将输入的小功率电信号转换为大功率的液压能(压力与能量)输出,其性能对系统特性影响很大。电液伺服阀在电厂中被广泛使用,伺服阀是电液伺服控制系统中的重要控制元件,在系统中起着电液转换和功率放大作用。电液伺服阀的性能和可靠性将直接影响系统的性能和安全,是电液伺服控制系统中引人瞩目的关键元件。 20 世纪70 年代以来,国内开始了对电液伺服系统的研究和应用。近年来,随着国内机械工业的高速发展,对于高精度金属成型装备的需求大大增加,大规格电液伺服系统在锻压机械、轧钢机械、折弯机中的应用越来越广泛。而电液伺服阀的发展可以追溯到二战末期,1940 年前后,在飞机上最早出现了电液伺服控制系统。电液伺服阀将输入的小功率电信号转换为大功率液压输出形式( 压力和流量) ,具有控制精度高和响应速度快的特点。电液伺服阀结构精密,对油液介质要求高,价格昂贵。典型结构有喷嘴挡板式和射流管式,喷嘴挡板式动态响应快,灵敏度高,但是零位泄漏量大,喷嘴易堵塞。与喷嘴挡板式电液伺服阀相比,射流管式电液伺服阀抗污染能力强,但是响应速度略慢。 为使电液伺服系统能够可靠并廉价地应用到实际工业生产中,20 世纪60 年代末,出现了电液比例阀。电液比例阀是阀内比例电磁铁根据输入的电压信号产生相应动作,使阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例的压力、流量输出的元件。后来又经过了一系列的发展,20 世纪末,伺服技术与比例技术相结合,伺服比例阀应运而生。与电液伺服阀相比,电液比例阀抗污染能力强,成本低,但是其直线性和响应速度均不及电液伺服阀。 电液伺服阀和电液比例阀有其独有的特点和优势,但也因其自身结构特点的原因,有一些先天的劣势。特别是当要求输出的液压功率较大,而电-机械转换元件输出功率较小,无法直接驱动功率级主阀时,需要增加液压先导级,无疑使阀的结构更加复杂,稳定性降低。而电磁直驱式大规格电液伺服阀以其新的设计
电液伺服阀的结构组成原理(复习最精)
当A相通电转为A和B同时通电时,转子的磁极将同时受到A相绕组产生的磁场和B相绕组产生的磁场的共同吸引,转子的磁极则停在A和B两相磁极之间,此时步距角为15°,减小一半。 三相反应式步进电机的一个通电循环周期如下:A→AB→B→BC→C→CA,每个循环周期分为六拍。 每拍转子转过15°,一个通电循环周期转子转过90°。 与单三拍相比,六拍驱动方式的步进角更小,更适用于需要精确定位的控制系统中。 2.为什么说液压阻尼比是一个可变量?低阻尼对液压系统的动态 特性有什么影响?如何提高系统的阻尼?这些方法各有什么优缺 点? 因为阀的流量-压力系数是影响液压阻尼比的重要参数,而阀开口是可变的,流量-压力会随之改变,所以液压阻尼比是一个可变量。 低阻尼会使系统的稳定性下降。 提高液压阻尼比的方法:设置液压缸管路泄露通道;采用正开口阀;增设阻尼器;采用压力反馈、动压反馈或加速度反馈等。 采用压力反馈可以提高系统的阻尼比和固有频率,但会降低系统的开环增益,系统刚度降低, 干扰误差增加。 动压反馈校正能提高系统的阻尼比同时不改变系统的刚度。 加速度反馈校正可以提高系统的阻尼比,同时降低谐振的振幅。 低阻尼是影响系统的稳定性和限制系统频宽的主要因素之一。提高系统的阻尼的方法有以下几种: 1)设置旁路泄露通道。在液压缸两个工作腔之间设置旁路通道增加泄露系C。缺点是增大了功率损失,降低了系统的总压力增益和系统的刚度,增加数 tp 外负载力引起的误差。另外,系统性能受温度变化的影响较大。 K值大,可以增加阻尼,但也要使系统刚度2)采用正开口阀,正开口阀的 c0
降低,而且零位泄漏量引起的功率损失比第一种办法还要大。另外正开口阀还要带来非线性流量增益、稳态液动力变化等问题。 3)增加负载的粘性阻尼。需要另外设置阻尼器,增加了结构的复杂性。 4)在液压缸两腔之间连接一个机-液瞬态压力反馈网络,或采用压力反馈或动压反馈伺服阀。 3、影响液压动力执行元件特性的因素有哪些?有什么影响?如 何实现液压动力执行元件与负载的匹配? 答:影响液压动力执行元件特性的因素有液压源压力、负载流量大小、液压缸尺寸。 影响:1)提高液压源压力,特性曲线形状不变,顶点右移。 2)提高流量大小,特性曲线顶点不变,形状变宽。 3)提高液压缸活塞面积,顶点右移,形状变窄,功率不变。 液压动力执行元件特性曲线包含负载特性曲线,且两曲线在最大功率处有公共切点,即为 液压动力执行元件与负载的最佳匹配。 4、液压固有频率有什么意义?提高液压固有频率对系统有什么 好处?如何提高系统固有频率? 答:液压固有频率是负载惯性与液压缸封闭油腔中液体的压缩性相互作用的结果。 它常常是系统的最低频率,它的大小决定着伺服系统的响应速度。 提高液压固有频率可以提高系统的响应速度和动态品质。 提高方法:1)尽可能使阀靠近液压缸,减少管道体积,使系统油液体积减小到最低。2)选择高 品质液压油,弹性模量尽可能高。3)增加液压系统管道和腔室结构的刚度。液压固有频率是负载质量与液压缸工作腔中的油压缩性所形成的液压弹簧相互作用的结果。液压固有频率标示液压动力元件的响应速度。 提高液压固有频率的办法:增大液压缸活塞杆面积,Ap。减小总压缩体积Vt。减小折算到活塞上的总质量Mt。提高油液的有效体积弹性模量βe,液压阻尼比合适。 5.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 6.什么叫动力元件,有哪几种动力元件? 液压动力元件是由液压放大元件(液压控制单元)和液压执行元件组成。液压放大元件可以使液压控制阀,也可以是伺服变量泵。液压执行元件是液压缸或液压马达。由他们组成四种基本型式的液压动力元件:阀控液压缸,阀控液压马达,泵控液压缸,泵控液压马达。前两种动力元件可以构成阀控(节流控制)系统,后两种动力元件可以构成泵控(容积控制)系统。
射流管式电液伺服阀与喷嘴挡板式电液伺服阀比较
射流管式电液伺服阀与喷嘴挡板式电液伺服阀比较 1 序言射流管式电液伺服阀与喷嘴挡板式电液伺服阀是目前世界上运用最普遍的典型两级流量控制伺服阀。由于射流管式电液伺服阀在国外属高端产品,主要运用于航空、航天、军事等行业,对国内引进实行限制,目前国内除少数电厂随设备引进较大流量的射流管阀外,一般很少见到该型阀。国内成规模生产该型阀的单位也只有中国船舶重工集团公司第七O 四研究所。而喷嘴挡板式电液伺服阀国内外运用得比较普遍,国内生产该型阀的单位也比较多。本文将对两种阀的构造与特点作一简单介绍。 2 工作原理 2.1 喷嘴挡板式伺服阀的原理 图1 为喷嘴挡板式伺服阀的原理图。它主要由力矩马达、喷嘴挡板式液压放大器、滑阀式功率级及反馈杆组件构成。 其工作过程为:输入到力矩马达线圈的电气控制信号在衔铁两端产生磁力,使衔铁挡板组件偏转。 挡板的偏移将一侧喷嘴挡板可变节流口减小,液流阻力增大,喷嘴的背压升高;而另一侧的可变节流口增大,液流阻力减小,液流的背压降低。这样可得到与挡板位置变化相对应的喷嘴背压,此背压加到与与喷嘴腔相通的阀芯端部,推动阀芯移动。而阀芯又推动反馈杆端部的小球,产生反馈力矩作用在衔铁挡板组件上。当反馈力矩逐渐等于电磁力矩时,衔铁挡板组件被逐渐移回到对中的位置。于是,阀芯停留在某一位置。在该位置上,反馈杆的力矩等于输入控制电流产生的的力矩,因此,阀芯位置与输入控制电流大小成正比。当供油压力及负载压力为一定时,输出到负载的流量与阀芯位置成正比。 2.2 射流管式伺服阀的原理 图2 为射流管式伺服阀的原理图。力矩马达采用永磁结构,弹簧管支承着衔铁射流管组件,并使马达与液压部分隔离,所以力矩马达是干式的。前置级为射流放大器,它由射流管与接受器组成。当马达线圈输入控制电流,在衔铁上生成的控制磁通与永磁磁通相互作用,于是衔铁上产生一个力矩,促使衔铁、弹簧管、喷嘴组件偏转一个正比于力矩的小角度。经过喷嘴的高速射流的偏转,使得接受器一腔压力升高,另一腔压力降低,连接这两腔的阀芯两端形成压差,阀芯运动直到反馈组件产生的力矩与马达力矩相平衡,使喷嘴又回到两接受器的中间位置为止。这样阀芯的位移与控制电流的大小成正比,阀的
电液伺服阀的发展与研究现状
电液伺服阀的发展与研究现状 陈潜201302070902 健行理工1301班 电液伺服阀是电液伺服控制中的关键元件,它是一种接受模拟电信号后,相应输出调制的流量和压力的液压控制阀。电液伺服阀具有动态响应快、控制精度高、使用寿命长等优点,已广泛应用于航空、航天、舰船、冶金、化工等领域的电液伺服控制系统中。电液伺服阀是电液联合控制的多级伺服元件,它能将微弱的电气输入信号放大成大功率的液压能量输出。它具有控制精度高和放大倍数大等优点,在液压控制系统中得到广泛的应用。 一发展过程 1750年左右,用于控制给水系统和蒸汽锅炉水位的液位控制阀在英国出现。随着工业革命的发展,控制策略的不断改进,进而影响到液压技术的发展。在二战前夕,由于空气动力学的应用,要求发明一种能够实现机械信号与气体信号转换装置。在二战末期,伺服阀是采用滑阀阀芯在阀套中移动的结构。阀芯的运动是直流螺线管产生的电磁力与弹簧产生的压力共同作用的结果,因此,此时的伺服阀还仅仅是一种单级开环控制阀。二战结束后,电液伺服阀开发研制进入了迅速发展时期,很多结构设计进一步提高了电液伺服阀的性能。特别是1960年的电液伺服阀设计更多地显示出了现代伺服阀的特点。 1946年,英国人获得了两级阀的专利。 1950年,W.C.Moog第一个发明了单喷嘴两级伺服阀。 1953年至1955年间,T.H.Carson发明了机械反馈式两级伺服阀,W.C.Moog 发明了双喷嘴两级伺服阀,Wolpin发明了干式力矩马达,消除了原来浸在油液内的力矩马达由油液污染带来的可靠性问题。 1957年Atchley利用射流管原理研制了两级射流管伺服阀。 1959年Atchley研制了三级电反馈伺服阀。 1959年2月,国外某液压与气动杂志对当时的伺服阀情况作了12页的报道,显示了当时伺服阀蓬勃发展的状况。那时生产各种类型的伺服阀的制造商有20多家。大多数生产具有反馈及力矩马达的两级伺服阀。
CSDY1射流管电液伺服阀产品说明书
CSDY1射流管电液伺服阀产品说明书 产品讲明书 编制: 校对: 审核: 审定: 九江外表厂 一九八九年十二月
CSDY1射流管电液伺服阀产品讲明书 一、概述: CSDY1系列射流管电液伺服阀是力反馈型两级流量伺服操纵阀,具有性能良好,抗污染能力强,安全可靠以及寿命长的突出特点,适用于电液伺服系统的位置、速度、加速度和力的操纵。 二、结构原理: 图1是CSDY1系列射流管电液伺服阀的原理图,力矩马达采纳永磁力矩马达,由两个永久磁钢产生极化磁通,衔铁两端伸入磁通回路的空气隙中,弹簧管一端固定在壳体上,另一端固定在衔铁组件的钢套中。反馈弹簧组件的一端固定在射流管喷嘴上,反馈杆被夹牢在阀芯的中心位置。 高压油连续地从供油腔Ps通过滤油器及固定节流孔,到射流管喷嘴向两个同意孔喷射,同意孔分不与阀芯两端操纵腔相通。 当力矩马达线圈组件输入操纵电流时,由于操纵磁通和极化磁通的相互作用,在衔铁上产生一个力矩,该力矩使衔铁组件绕弹簧管旋转,从而使射流管喷嘴运动导致两个同意孔腔产生压差引起阀芯位移,且一直连续到由反馈弹簧组件弯曲产生的反馈力矩与操纵电流产生的操纵力矩相平稳为止。 由于阀芯位移与反馈力矩成比例,操纵力矩与操纵电流成比例,伺服阀的输出流量与阀芯位移成比例,因此伺服阀的输出流量与输入的指令操纵电信号亦成比例,若给伺服阀输入反向电控信号,则伺服
阀就有反向流量输出。 三、技术性能指标: 1、供油压力范畴(MPa) 2.1~31.5 2、额定供油压力(MPa)20.6 3、额定流量(L/min)2—40(按用户要求) 4、滞环(%)≤3 ≤5(用于低频操纵系统) 5、辨论率(%)≤0.25 6、线性度(%)≤7.5 7、对称度(%)≤10 8、压力增益(%Ps/1%In)≥30 9、静耗流量(L/min)≤0.45+3%Qn 10、零偏(%)≤2 11、幅频宽(-3Db)(HZ) ≥70 ≥40(用于低频操纵系列) 12、相频宽(-90°)(HZ)≥90 四、线圈连接方法: 伺服阀线圈的连接方法,插销头标号,外引出线颜色及操纵电流的极性等参照下表和射流管电液伺服阀安装图(图2)
新型高性能直接驱动电液伺服阀
第24卷2005年第12期 12月 机械科学与技术 MECHANICALSCIENCEANDTECHNOLOGY V01.24No.12 December2005 肖俊东文章编号;J003—8728f2005)12—1423-03 新型高性能直接驱动电液伺服阀 肖傻东1,王占林1,陈克昌2 (1北京航空航天大学自动化科学与哇尊工程学院,北京100083 2北京成科昌伺服阀有限公司,北京100186) 摘要:研制了一种全新结构的直接驱动电液伺服闽。谈阀在结构土采用转动阀芯取代滑动网芯,变滑阀蛄构为转阐,有效的减少了阀的液动力.极大地提高了闯的抗污染性能;在驱动控制上采用直流力矩电机直接驱动闽芯,将对罔的控制转变为对电机的控制,易于实现阀的数字控制。实验结果表明该网的主要动、静特性指标均已超过国内外相同规格不同驱动控制类型的各种电液伺服闯.尤其是具有现有阔无法比拟的抗污染能力。 关键词:转动阀芯;直接驱动;电液伺服阀;直流力矩电机;PwM 中盈分类号:THl375;TM383文献标识码:A ANewTypeHighRerformanceDirect-driveElectrohydraulicServoValve xiaoJundong‘,w8ngzhanlinl,chenKechan∥ (1SchoolofAuotomationscienceandElectricalEnginee“ng,Beihanguniver8ity,Be玎in窖100083; 1(:henkecha“gservoValvecompany0fBe玎i“g,Beijing100186) Abstract:Thispaperdevelopsadirect—driveelectmhydraulicservovalveofacompletely new咖咖陀.ThevalverePlacesglidingvalvecore8byrotationalvalvecores,chan舀“gglidi“gvalve8intorot8donBlvBlves.ItnotonlyeffectivelyreduceshydraulicresistancebutalsogreatlyimPmvesthecapabil时ofthere8i8t8nce.Intermsofdrivecontr01.theuseofdi陀ctdrivemotorstodrivevalvecore8directlvwillch蚰gethecontfolofvalve8intothatofmotors,thusfacilitn【i“gdigitalcontmls0fmotd聘.E1periment8lresultsshowt}Iatthenewtypeelectrohydraulicservov8lvehasbetterandunpamlleleddvnamicandsEaticperfjmanceofresi8tingpollution. Keywords:rot8tion出va】vecore;djrect-driyo;electrohydrau】jcsewovalve;bnlsbJeBsDCmomenlmo.tor:PWM 电液伺服阔是电液伺服系统的关键元件,目前广泛使用的伺服阀主要是带有先导阀的两级或三级喷嘴挡板阀和射流阀,这些闷虽然性能优良,但结构复杂,制造困难,而且抗污能力差,使用条件极为苛刻,对油液的蒋染非常敏感,故障率较高,另外,由于该类阀的传递环节多,因此其带宽亦受到限制,很难满足宽带高频响电液系统的需要。而直接驱动伺服阀具有结构简单、抗污染能力强、可靠性高等特点,其动态特性和控制精度电优于普通的电液伺服阈。本文从直接驱动伺服阀的结构及机理出发,研制出一种基于转动阀芯结构的伺服阀。它采用直流力矩电机直接带动转阀的阀芯,为单级结构,不但可靠性高,而且具有很强的抗搏染能力,适用领域非常广泛。 l新型直接驱动电液伺服阀的组成与工作原理 图1为转阀式新型直接驱动电液伺服阀的组成和工作原理图。其工作原理为:直流力矩电机通过弹性联轴器带 收辅日期:2004一10一18 作者简介:肖俊东(】975一).男(汉).湖南.博士研究生 E—il:x州_hua口@s“ucom动转阀阁芯在一定角度范围内转动,转阀阀芯与阀套上对应开了n个与轴向有一定倾角的斜槽,阀芯相对阀套转动,使阎芯和阀套上的斜槽相互贯通或互相封闭,从而控制伺服阀前后的流量和压力。 匣馈角位臀 幽J转阀式新型盲接驱动电液伺服闽的组成原理图 由新型直接驱动阀的结构和工作原理,可以看出该阀的结构十分简单,并且将普通伺服阀的滑阀精动结构转变为转阙的转动,不仅可以有效地降低阀工作时的摩擦阻力, 而且由于阀芯和阀套上斜槽的工作面积在阀芯转动过程中 万方数据
液压伺服工作原理
液压伺服工作原理 1.1 液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。 电液伺服系统通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而实现了一些重型机械设备的伺服控制。 液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。液压伺服系统的工作原理可由图1来说明。 图1所示为一个对管道流量进行连续控制的电液伺服系统。在大口径流体管道1中,阀板2的转角θ变化会产生节流作用而起到调节流量qT的作用。阀板转动由液压缸带动齿轮、齿条来实现。这个系统的输入量是电位器5的给定值 x i 。对应给定值x i ,有一定的电压输给放大器7,放大器将电压信号转换为电流 信号加到伺服阀的电磁线圈上,使阀芯相应地产生一定的开口量x v 。阀开口x v 使液压油进入液压缸上腔,推动液压缸向下移动。液压缸下腔的油液则经伺服阀流回油箱。液压缸的向下移动,使齿轮、齿条带动阀板产生偏转。同时,液压缸 活塞杆也带动电位器6的触点下移x p 。当x p 所对应的电压与x i 所对应的电压相 等时,两电压之差为零。这时,放大器的输出电流亦为零,伺服阀关闭,液压缸带动的阀板停在相应的qT位置。 图1 管道流量(或静压力)的电液伺服系统 1—流体管道;2—阀板;3—齿轮、齿条;4—液压缸;5—给定电位器;6—流量传感电位器;7—放大器;8—电液伺服阀 在控制系统中,将被控制对象的输出信号回输到系统的输入端,并与给定值进行比较而形成偏差信号以产生对被控对象的控制作用,这种控制形式称之为反
电液伺服阀的应用及发展趋势
电液伺服阀的应用及发展趋势 摘要:电液伺服阀是电液伺服控制系统中的重要控制元件,在系统中起着电业转换和功率放大作用。具体地说,系统工作时,他直接接收系统传递来的电信号,并把电信号转换成具有相应极性的、成比例的、能够控制电液伺服阀的负载流量或负载压力的信号,从而使系统输出较大的液压功率,用以驱动相应的执行机构。电液伺服阀的性能和可靠性可以直接影响系统的性能和可靠性,是电液伺服控制系统中引人注目的关键元件。 关键字:电液伺服阀;现状;发展趋势;应用;展望 引言:电液伺服阀是一种变电气信号为液压信号以实现流量或压力控制的转换装置。它充分发挥了电气信号传递快、线路连接方便,适于远距离控制,易于测量、比较和校正的有点,和液压输出力大、惯性小、反应快的优点。这两者的结合使电液伺服阀成为一种反应灵活、精度高、快速性好、输出功率大的控制元件。[1] 一、电液伺服阀研究现状 群控系统(DNC)和柔性制造系统(FMS)等新工艺装备的使用,计算机辅助设计(CAD)和计算机辅助测试(CAT)的广泛应用,为我们进一步简化伺服阀结构,完善设计,降低工艺制造成本和管理费用,提高产品性能,稳定产品质量,增加产品可靠性和延长使用寿命创造了极其有利的条件。 1、伺服阀的结构改进 (1)在电液伺服阀的部分结构上,主要从余度技术、结构优化和材料的更替等方面进行改造,以提高相关性能。采用三余度技术的电液伺服作动系统[1]将伺服阀的力矩马达、喷嘴挡板阀、系统的反馈元件等做成一式三份,若伺服阀线圈有一路断开,而系统仍能够正常工作,且有系统动态品质性能基本不变,从而提高了伺服作动系统的可靠性和容错能力。在结构的改进上,针对阀出现的故障提出改进措施,进行结构优化,以满足其相关性能的要求。从材料方面考虑,阀的某些元件采用了强度、塑性、韧性、硬度等机械性能优良的材料,既可以减少故障,又让阀具备良好的动态性能。 (2)从阀芯和阀套磨配加工工艺的改进上,采用不同的磨配原理,如磁力研磨法等原理来提高阀的工作性能。阀芯和阀套组成的滑阀副是伺服阀的核心,阀套窗口棱边的几何精度决定了阀的工作性能。在阀芯加工最后磨配端面时,不能直接获得尖锐的棱边,而是在棱边处产生“毛刺”,然后采取措施加以去除。上海交大的陈鹏研制了智能化、全自动的伺服阀配磨系统,以计算机为核心,能自动测量阀的输出特性,并给出配磨参数,从而使阀芯、阀套的制造简便、迅速。1992年由美国某公司在加州制造了一台加工阀芯棱边的CNC液压磨床,由另一公司制造了一台配合磨床的液压测试台,二者结合起来就是自动化流量磨削系统,使产品的完好率从50%提高到85%~90%,生产阀芯的时间缩减75%~80%,制造厂称加工精度可达±015μm,性能相当优良。[2]
电液伺服阀
电液伺服阀 ——控制技术、机床、电子化一概述 电液伺服阀是电液伺服控制中的关键元件,它是一种接受模拟电信号后,相应输出调制的流量和压力的液压控制阀。电液伺服阀具有动态响应快、控制精度高、使用寿命长等优点,已广泛应用于航空、航天、舰船、冶金、化工等领域的电液伺服控制系统中。 二.发展过程 液压控制技术的历史最早可追溯到公元前240年,当时一位古埃及人发明了人类历史上第一个液压伺服系统——水钟。然而在随后漫长的历史阶段,液压控制技术一直裹足不前,直到18世纪末19世纪初,才有一些重大进展。在二战前夕,随着工业发展的需要,液压控制技术出现了突飞猛进地发展,许多早期的控制阀原理及专利均是这一时代的产物。如:Askania调节器公 司及Askania-Werke发明及申请了射流管阀原理的专利。同样Foxboro发明了喷嘴挡板阀原理的专利。而德国Siemens公司发明了一种具有永磁马达及接收机械及电信号两种输入的双输入阀,并开创性地使用在航空领域。 在二战末期,伺服阀是用螺线管直接驱动阀芯运动的单级开环控制阀。然随着控制理论的成熟及军事应用的需要,伺服阀的研制和发展取得了巨大成就。 1946年,英国Tinsiey获得了两级阀的专利;Raytheon和Bell航 空发明了带反馈的两级阀;MIT用力矩马达替代了螺线管使马达消耗的功率 更小而线性度更好。1950年,W.C.Moog第一个发明了单喷嘴两级伺服阀。1953年至1955年间,T.H.Carson发明了机械反馈式两级伺服阀;W.C.Moog 发明了双喷嘴两级伺服阀;Wolpin发明了干式力矩马达,消除了原来浸在油液内的力矩马达由油液污染带来的可靠性问题。 1957年R.Atchley利用Askania射流管原理研制了两级射流管伺服阀。并于1959年研制了三级电反馈伺服阀。 1959年2月国外某液压与气动杂志对当时的伺服阀情况作了12页的报道,显示了当时伺服阀蓬勃发展的状况。那时生产各种类型的伺服阀的制造商有 20多家。各生产厂家为了争夺伺服阀生产的霸权地位展开了激烈地竞争。回顾历史,可以看到最终取胜的几个厂家,大多数生产具有反馈及力矩马达的两级伺服阀。我们可以看到1960年的伺服阀已具有现代伺服阀的许 多特点。如:第二级对第一级反馈形成闭环控制;采用干式力矩马达;前置级对功率级的压力恢复通常可达到50%;第一级的机械对称结构减小了温度、压力变化对零位的影响。同时,由早期的直动型开环控制阀发展变化而来的直动型两级闭环控制伺服阀也已出现。当时的伺服阀主要用于军事领域,随着太空时代的到来,伺服阀又被广泛用于航天领域,并研制出高可靠性的多余度伺服阀等尖端产品。 与此同时,随着伺服阀工业运用场合的不断扩大,某些生产厂家研制出了专门使用于工业场合的工业伺服阀。如Moog公司就在1963年推出了第一
电液比例阀工作原理
电液比例阀是阀内比例电磁铁输入电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例压力、流量输出元件。阀芯位移也可以以机械、液压或电形式进行反馈。电液比例阀具有形式种类多样、容易组成使用电气及计算机控制各种电液系统、控制精度高、安装使用灵活以及抗污染能力强等多方面优点,应用领域日益拓宽。近年研发生产插装式比例阀和比例多路阀充分考虑到工程机械使用特点,具有先导控制、负载传感和压力补偿等功能。它出现对移动式液压机械整体技术水平提升具有重要意义。特别是电控先导操作、无线遥控和有线遥控操作等方面展现了其良好应用前景。 2 工程机械电液比例阀种类和形式 电液比例阀包括比例流量阀、比例压力阀、比例换向阀。工程机械液压操作特点,以结构形式划分电液比例阀主要有两类:一类是螺旋插装式比例阀(screwin cartridge proportional valve),另一类是滑阀式比例阀(spool proportional valve)。 螺旋插装式比例阀是螺纹将电磁比例插装件固定油路集成块上元件,螺旋插装阀具有应用灵活、节省管路和成本低廉等特点,近年来工程机械上应用越来越广泛。常用螺旋插装式比例阀有二通、三通、四通和多通等形式,二通式比例阀主比例节流阀,它常它元件一起构成复合阀,对流量、压力进行控制;三通式比例阀主比例减压阀,也是移动式机械液压系统中应用较多比例阀,它主对液动操作多路阀先导油路进行操作。利用三通式比例减压阀可以代替传统手动减压式先导阀,它比手动先导阀具有更多灵活性和更高控制精度。可以制成如图1所示比例伺服控制手动多路阀,不同输入信号,减压阀使输出活塞具有不同压力或流量进而实现对多路阀阀芯位移进行比例控制。四通或多通螺旋插装式比例阀可以对工作装置实现单独控制。 滑阀式比例阀又称分配阀,是移动式机械液压系统最基本元件之一,是能实现方向与流量调节复合阀。电液滑阀式比例多路阀是比较理想电液转换控制元件,它保留了手动多路阀基本功能,还增加了位置电反馈比例伺服操作和负载传感等先进控制手段。它是工程机械分配阀更新换代产品。 出于制造成本考虑和工程机械控制精度要求不高特点,一般比例多路阀内不配置位移感应传感器,具有电子检测和纠错功能。,阀芯位移量容易受负载变化引起压力波动影响,操作过程中要靠视觉观察来保证作业完成。电控、遥控操作时更应注意外界干涉影响。近来,电子技术发展,人们越来越多采用内装差动变压器(LDVT)等位移传感器构成阀芯位置移动检测,实现阀芯位移闭环控制。这种由电磁比例阀、位置反馈传感器、驱动放大器和其它电子电路组成高度集成比例阀,具有一定校正功能,可以有效克服一般比例阀缺点,使控制精度到较大提高。 3 电液比例多路阀负载传感与压力补偿技术 节约能量、降低油温和提高控制精度,同时也使同步动作几个执行元件运动时互不干扰,现较先进工程机械都采用了负载传感与压力补偿技术。负载传感与压力补偿是一个很相似概念,都是利用负载变化引起压力变化去调节泵或阀压力与流量以适应系统工作需求。负载传感对定量泵系统来讲是将负载压力负载感应油路引至远程调压溢流阀上,当负载较小时,溢流阀调定压力也较小;负载较大,调定压力也较大,但也始终存一定溢流损失。变量泵系统是将负载传感油路引入到泵变量机构,使泵输出压力随负载压力升高而升高(始终为较小固定压差),使泵输出流量与系统实际需要流量相等,无溢流损失,实现了节能。
射流管式电液伺服阀
CSDY1 CSDY2电液伺服阀是目前国际电液伺服阀中的最新产品。采用干式力矩马达,整体焊接,射流管为先导级,主滑阀作功放,是一种高性能力反馈两级方向、流量控制阀。它接受微小电信号并转换为液压功率放大,输出流量大小与控制电信号大小成比例。其特点:(1)结构牢固。可抗Ⅰ级振动、Ⅰ级颠振和400g加速度攻击;(2)零位稳定优于双喷嘴挡板型阀,安全可靠;(3)分辨率极高;(4)抗污染能力极强,可使用NAS1638的7-8级油液;(5)寿命长,使用次数可达107次(约5000小时);(6)控制精度高。适用于遍及各个领域中的高精度电液伺服系统。如:造船工业、航天工业、航空工业、重工业、轻、纺工业,以及农业机械液压伺服系统。主要技术指标 1.型号CSDY1-2、4、8、10、15、20、30、40 (CSDY2-60、80、100、120)2.额定电流±8mA 3.线圈电阻1000±100Ω 4.绝缘电阻>50MΩ 5.额定压力206×105Pa 6.使用压力(20~309)×105Pa 7.额定流量2、4、8、10、15、20、30、40L/min (CSDY2型:60、80、100、120)8.滞环<3% 9.线性度<7.5% 10.对称度10% 11.静耗流量<0.45+3%Qn 12.压力增益>30%Ps/1%△i 13.分辨率<0.25% 14.零偏<2% 15.种类零漂指标2% 16.频率特性(-3db)>70Hz(-90°角)>90Hz 17.温度范围-40C~+85C 18.工作液粘度10-100cst 19.系统过滤精度10~20u 工作原理高压油Ps一路通过滤油器进入射流管喷嘴,另一路进入阀芯和阀套组成的通路。当无信号电流时,阀处于零位,无流量输出。当有控制信号电流输入时,使射流管喷嘴偏转(设顺时针),接受器左腔压力上升,右腔压力下降,阀芯在压差作用下右移,其油路Ps-A-1负载-2-C-P。阀芯右移时,反馈力矩反馈到射流管组件,使接受器两腔差趋于零,阀芯有一微小位移,输出稳定流量。若控制信号电流反向,伺服阀则输出反向流量。使用注意事项1、伺服阀安装前应先装上随带附件:冲洗板。启泵运行不少于8H,工作液清洁度应达到NAS7级。2、伺服阀进口前应安装精度为10-20μm的油滤。3、每年定期取样检查,更换滤芯及工作液。4、伺服阀在未供压情况下,应尽量避免通入交变信号。5、伺服阀的安装座应有足够刚度,其安装表面粗糙度不低于Ra1.6μm,表面平面度不大于0.03μm。6、用户在使用过程中,发现油污染,只能拆伺服阀滤油器组件,清洗或更换。7、使用中发生故障应返厂修理,用户不应自行分解。
【九江】CSDY系列射流管型电液伺服阀介绍
CSDY系列射流管型电液伺服阀介绍九江中船仪表有限责任公司(四四一厂)
CSDY系列射流管型电液伺服阀介绍 一、工作原理 CSDY系列射流管型电液伺服阀是力反馈两极电液伺服阀,力矩马达采用永磁结构,弹簧管支承着衔铁射流管组件,并使力矩马达与液压油隔离,所以力矩马达是干式的,其结构原理图如下: 由上图可见,射流管型电液伺服阀主要由线圈、衔铁、射流管、喷嘴、反馈弹簧、阀芯、油滤等部分组成。 当力矩马达线圈输入控制电流时,由于控制磁通和永磁磁通的相互作用,在衔铁上产生一个力矩,促使衔铁、弹簧管、喷嘴组件偏转一个正比于力矩的小角度,经过喷嘴高速喷射出的高压液流也发生偏转,使得接受器一腔压力升高,另一腔压力降低,使连接这两腔的阀芯两端产生压差,阀芯运动,直到反馈组件产生的力矩与力矩马达力矩平衡,使喷嘴又回到接受器两孔中间位置为止。这样阀芯的位移与控制电流的大小成正比,阀的输出流量就正比于控制电流了。 二、射流管型电液伺服阀的特点 1、前置级射流放大器的独特结构,可以通过300μm的污染颗粒,不会发生故障,抗污染能力特别强。 2、分辨率及高,可以在较低的压力下工作。 3、阀芯驱动力大,不容易发生卡滞现象。
三、额定电流规格和对应的线圈电阻 序号 1 2 3 5 7 8 9 10 11 项目 额定电流 8 10 15 20 30 40 50 64 80 (mA) 线圈电阻 1000 650 350 160 75 40 25 16 10.5 (Ω) 注: 1、其他特殊规格可单独定制; 2、最大过载电流可以是额定电流的两倍。 四、线圈的连接方式 1、插座接线图 2、线圈的连接方式 单线圈串联并联差动连接
伺服阀工作原理
(1)电液伺服阀的组成 伺服阀由力矩马达、液压放大器、反馈机构三部分组成 (2)力矩马达的工作原理 力矩马达的作用是把输入的电气控制信号转换为力矩。它由永久磁铁、上导磁体、下导磁体、衔铁、控制线圈、弹簧管等组成。衔铁固定在弹簧管上端,由弹簧管支承在上、下导磁体的中间位置,可绕弹簧管的转动中心作微小的转动。 永久磁铁将上、下导磁体磁化,一个为N级,另一个为S级。无信号电流时,衔铁在上、下导磁体的中间位置,由于力矩马达结构是对称的,使磁铁两端所受的电磁力相同,力矩马达无力矩输出。当有信号电流通过线圈时,控制线圈产生控制磁通,其大小和方向取决于信号电流的大小和方向电磁力矩的大小与信号电流的大小成比例,衔铁的转角也与信号电流成比例。
力矩马达磁路原理图 对于上图的磁路分析: 对分支点A 和B 应用磁路基尔霍夫第一定律可得衔铁磁通 12a φφφ=- 整理后得到 g 2g 2()2l 1()l g c a x x φφφ+=- 由于2g (x/l )1 《,上式化简a g 2l c g g x N i R φφ=+?,考虑到x a θ≈,上式写成 a g 2l c g g a N i R φφθ=+? 由控制磁通和极化磁通的相互作用在衔铁上产生电磁力矩d 14=2a(F -F )T ,考
虑到衔铁转角θ很小,故有,,x tg x a a θθθ=≈≈则上式可写成: 2 2222g 22g (1)(1)l (1)l c t m g d x K i K T x φθφ+?++=-, 式中t K 为力矩马达的中位电磁力矩系数,g 2l t c g a K N φ= m K 为力矩马达的中位磁弹簧刚度,22g 4()l m g g a K R φ= 由上式可以看出,力矩马达的输出力矩具有非线性。为了改善线性度和防 止衔铁被永久磁铁吸附,力矩马达一般都设计成g x/l <1/3,即2g (x/l )1 《和2(/) 1c g φφ《。则接着化简成: t d m T K i K θ=?+ 上式中,t i K ?是衔铁在中位时,由控制电流i ?产生的电磁力矩,称为中位电磁力矩。m K θ是由于衔铁偏离中位时,气隙发生变化而产生的附加电磁力矩,它使衔铁进一步偏离中位。这个力矩与转角成比例,相似于弹簧的特性,称为电磁弹簧力矩。 (3) 液压放大器 液压放大器的运动去控制液压能源流向液压执行机构的流量或压力。力矩马达的输出力矩很小,在阀的流量比较大时,无法直接驱动功率级阀运动,此时需要增加液压前置级,将力矩马达的输出加以放大,再去控制功率级阀,功率级阀采用三位四通滑阀,这就构成了电液伺服阀。 三级电液伺服阀实质上是由通用型双喷嘴力反馈两级伺服阀和第三级滑阀组成,第三级滑阀的阀芯位移由电反馈来实现闭环控制。 伺服射流管先导阀主要由力矩马达、喷嘴挡板和接收器组成。当线圈中有电流通过时,产生的电磁力使挡板偏离中位。这个偏离和特殊形状的喷嘴设计使得当挡板偏向一侧时造成先导阀的接收器产生偏差。此压差直接导致阀芯两侧驱动