工程控制基础标准实验报告
电 子 科 技 大 学
实 验 报 告
学生姓名: 学 号: 指导教师: 实验地点:工程训练中心三楼 实验时间:
一、实验室名称:机械系测控实验室 二、实验项目名称:二阶系统时频域分析实验 三、实验学时:2学时 四、实验原理:
图1是典型Ⅰ型二阶单位反馈闭环系统。
图1 典型Ⅰ型二阶单位反馈闭环系统 Ⅰ型二阶系统的开环传递函数:
)1()(+=
Ts s T K s G i Ⅰ型二阶系统的闭环传递函数标准式:
2
2
2
2)(1)()(n
n n
s s s G s G s ωξωωφ++=+= 自然频率(无阻尼振荡频率):
T
T K i
=n ω 阻尼比:
KT T 21i
=
ξ
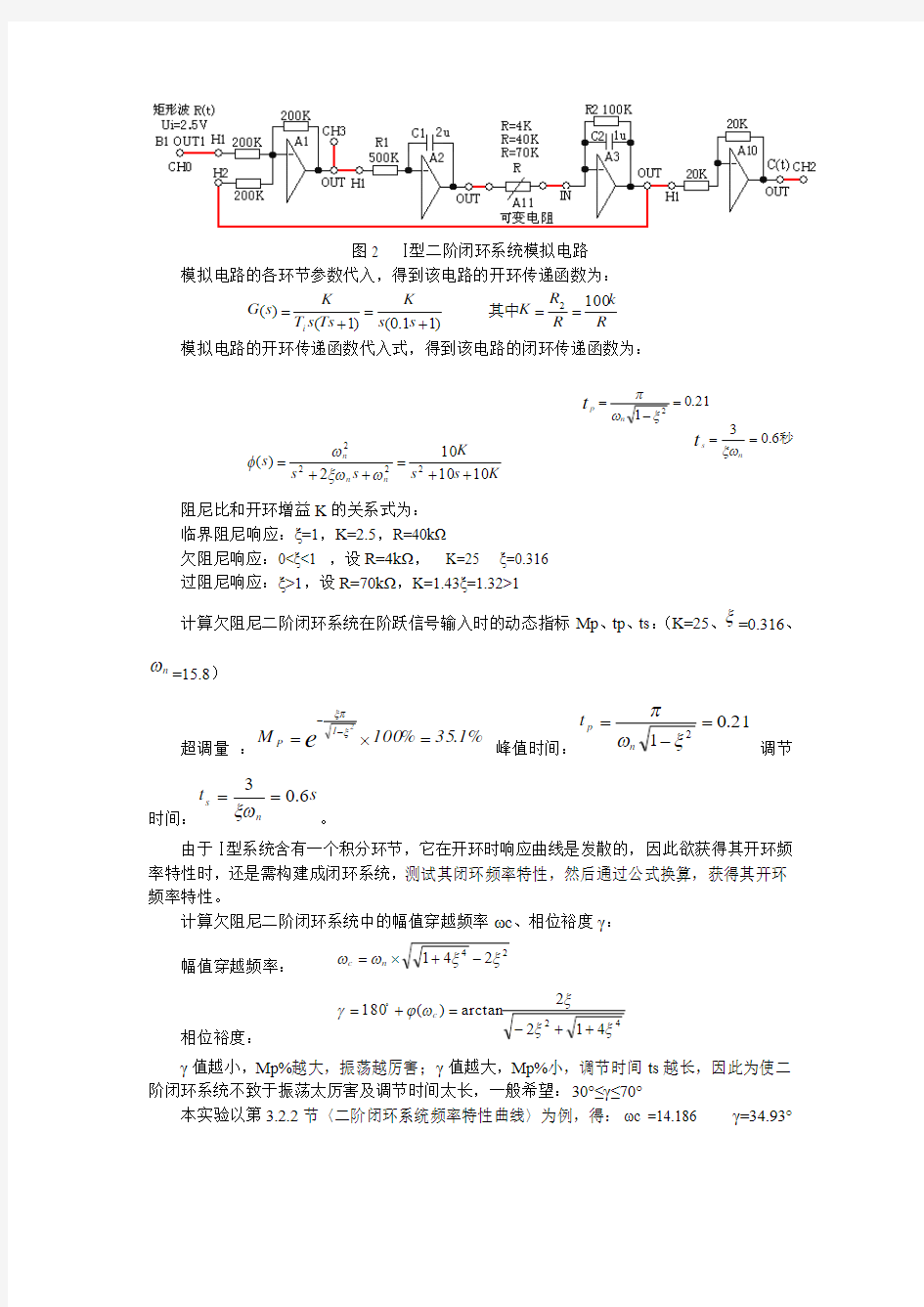
有二阶闭环系统模拟电路如图2所示。它由积分环节(A2单元)和惯性环节(A3单元)
的构成,其积分时间常数Ti=R1*C1=1秒,惯性时间常数 T=R2*C2=0.1秒。
图2 Ⅰ型二阶闭环系统模拟电路
模拟电路的各环节参数代入,得到该电路的开环传递函数为:
R k R R K s s K Ts s T K s G i 100)11.0()1()(2=
=+=+=其中
模拟电路的开环传递函数代入式,得到该电路的闭环传递函数为:
K
s s K s s s n n n
1010102)(2
222++=++=ωξωωφ 阻尼比和开环增益K 的关系式为: 临界阻尼响应:ξ=1,K=2.5,R=40kΩ
欠阻尼响应:0<ξ<1 ,设R=4kΩ, K=25 ξ=0.316 过阻尼响应:ξ>1,设R=70kΩ,K=1.43ξ=1.32>1
计算欠阻尼二阶闭环系统在阶跃信号输入时的动态指标Mp 、tp 、ts :(K=25、ξ=0.316、
n ω=15.8)
超调量 :
%
1.35%100M e
2
1P =?=--
ξ
ξπ 峰值时间:
21
.012
=-=
ξ
ωπn p t 调节
时间:
s
t n
s 6.03
==
ξω。
由于Ⅰ型系统含有一个积分环节,它在开环时响应曲线是发散的,因此欲获得其开环频率特性时,还是需构建成闭环系统,测试其闭环频率特性,然后通过公式换算,获得其开环频率特性。
计算欠阻尼二阶闭环系统中的幅值穿越频率ωc 、相位裕度γ:
幅值穿越频率:
2
4241ξξωω-+?
=n c
相位裕度:
4
24122arctan
)(180ξξξω?γ++-=+=c
γ值越小,Mp%越大,振荡越厉害;γ值越大,Mp%小,调节时间ts 越长,因此为使二阶闭环系统不致于振荡太厉害及调节时间太长,一般希望:30°≤γ≤70°
本实验以第3.2.2节〈二阶闭环系统频率特性曲线〉为例,得:ωc =14.186 γ=34.93°
21
.012
=-=
ξωπn p
t
秒
6.03
==
n
s
t
ξω
五、实验目的:
1.通过二阶系统的时频域分析验证课程讲授内容,加深学生对理论知识的理解程度,扩大学生视野,掌握基本的频域图解方法和时域系统校正方法。
2.了解和掌握典型二阶系统模拟电路的构成方法及Ⅰ型二阶闭环系统的传递函数标准式。
3.研究Ⅰ型二阶闭环系统的结构参数--无阻尼振荡频率ωn 、阻尼比ξ对过渡过程的影响。
4.掌握欠阻尼Ⅰ型二阶闭环系统在阶跃信号输入时的动态性能指标Mp 、tp 、ts 的计算。 5.观察和分析Ⅰ型二阶闭环系统在欠阻尼,临界阻尼,过阻尼的瞬态响应曲线,及在阶跃信号输入时的动态性能指标Mp 、tp 值,并与理论计算值作比对。
6.了解和掌握Ⅰ型二阶开环系统中的对数幅频特性)(ωL 和相频特性)(ω?,实频特性
)Re(ω 和虚频特性)Im(ω的计算。
7.了解和掌握欠阻尼Ⅰ型二阶闭环系统中的自然频率n ω、阻尼比ξ对开环参数幅值穿
越频率
c ω和相位裕度γ
的影响,及幅值穿越频率
c ω和相位裕度γ
的计算。
8.研究表征系统稳定程度的相位裕度
γ
和幅值穿越频率
c ω对系统的影响。
9.了解和掌握Ⅰ型二阶开环系统对数幅频曲线、相频曲线、和幅相曲线的构造及绘制方法
六、实验内容:
搭建二阶系统,观察系统时域响应曲线,通过调整电路中可调电阻的方式改变系统开环增益和系统阻尼比,观察开环增益和阻尼比变化时对系统稳定性和动态响应过程的影响。
二阶系统的频域分析,搭建二阶系统,通过设置不同的输入信号频率,获取输出信号,通过输入输出幅值相位变化绘制对数幅相特性图和幅相频率特性图,并确定c ω,γ等关键参数。
Ⅰ型二阶闭环系统模拟电路见图2,观察阻尼比ξ对该系统的过渡过程的影响。改变A3单中输入电阻R 来调整系统的开环增益K ,从而改变系统的结构参数。
观测二阶闭环系统的频率特性曲线,测试其谐振频率r ω、谐振峰值)(r L ω。
改变被测系统的各项电路参数,画出其系统模拟电路图,及闭环频率特性曲线,並计算和测量系统的谐振频率r ω及谐振峰值)(r L ω,填入实验报告。
七、实验器材(设备、元器件):
LabACTn 自控/计控实验机
八、实验步骤:
(1)构造模拟电路:按图2安置短路套及插孔连线,表如下。
(b )插孔连线
(2)运行、观察、记录:
分别将(A11)中的直读式可变电阻分别调整为4K 、40K 、70K ,选择线性系统时域分析/二阶系统瞬态响应和稳定性实验,确认信号参数默认值后,点击->下载->开始键后,实验运行,阶跃响应曲线见图3。用示波器观察在三种增益K 下,A10输出端C(t)的系统阶跃响应。
(a )0<ξ<1 欠阻尼阶跃响应曲线
(b )ξ=1临界阻尼阶跃响应曲线 (c )ξ>1过阻尼阶跃响应曲线
图3 Ⅰ型二阶系统在三种情况下的阶跃响应曲线
(3)构造模拟电路。
(a )安置短路套 (b )插孔连线
(4)运行、观察、记录: ① 选择系统的频域分析/二阶闭环系统频率特性曲线,将弹出频率特性扫描点设置表,用户可在设置表中根据需要填入各个扫描点角频率,设置完后,点击确认后,将弹出‘频率特性曲线’实验界面,点击开始,即可按表中规定的角频率值,按序自动产生多种频率信号,画出频率特性曲线。
② 测试结束后(约五分钟),将显示被测系统的对数幅频、相频特性曲线(伯德图)和幅相曲线(奈奎斯特图。
③谐振频率ωr 和谐振峰值L(ωr )的测试:
在闭环对数幅频曲线中,移动L 标尺和ω标尺到曲线峰值处可读出谐振频率r ω、谐振峰值)(r L ω。
在闭环对数相频曲线中,移动移动?标尺到ω标尺线与曲线相交处,可读出该角频率的?值。
④ 谐振频率ωr 和谐振峰值L(ωr)自动搜索 点击搜索谐振频率键,将自动搜索并补充搜索过的点,直到搜索到谐振频率,自动停止搜索,该点测试成功后,在特性曲线上将出现…黄色?的点,即谐振频率ωr ,同时在闭环幅频特性曲线图的右下方显示出该系统的谐振频率,在特性曲线图的右侧显示该角频率点的L 、?、Im 、Re 。
图4界面“显示选择”选择了“闭环-伯德图”。
注:搜索谐振频率时,请确保谐振峰值的两侧各有已测的测试点!
图4 被测二阶闭环系统的对数幅频曲线、相频曲线和幅相曲线
九、实验数据及结果分析:
时域分析部分:
⑴ 计算和观察被测对象的临界阻尼的增益K ,填入实验报告。
⑵ 画出阶跃响应曲线,测量超调量Mp ,峰值时间tp 填入实验报告。(计算值实验前必须计算出)
谐振峰值
ω标尺值 谐振频率
L 标尺值
?标尺值
谐振频率值
频域分析部分:
改变开环增益K(A3)、惯性时间常数T(A3)、积分常数Ti(A2),画出其系统模拟电路图,及闭环频率特性曲线,並计算和测量系统的谐振频率及谐振峰值,填入实验报告。
十、实验结论:
十一、总结及心得体会:
十二、对本实验过程及方法、手段的改进建议:
报告评分:
指导教师签字:
电 子 科 技 大 学
实 验 报 告
学生姓名: 学 号: 指导教师: 实验地点:工程训练中心三楼 实验时间:
一、实验室名称:机械系测控实验室 二、实验项目名称:频域法串联超前校正 三、实验学时:2学时 四、实验原理:
超前校正的原理是利用超前校正网络的相角超前特性,使中频段斜率由-40dB/dec 变为-20 dB /dec 并占据较大的频率范围,从而使系统相角裕度增大,动态过程超调量下降;并使系统开环截止频率增大,从而使闭环系统带宽也增大,响应速度也加快。超前校正网络的电路图及伯德图见图1。
图1 超前校正网络的电路图及伯德图
超前校正网络传递函数为: TS
1aTS
1a
1)S (G C ++?=
网络的参数为: 5
54R R R a +=, C R R R R T 5
454+=
在设计超前校正网络时,应使网络的最大超前相位角m ?尽可能出现在校正后的系统的幅值穿越频率ωc′处,即ωm =ωc′。
网络的最大超前相位角为:1a 1
-a arcsin
m +=? 或为: m
m sin 1sin 1a ??-+= m ?处的对数幅频值为:10lga )(L m C =?
网络的最大超前角频率为: a
T 1m =
ω 从式可知,接入超前校正网络后被校正系统的开环增益要下降a 倍,因此为了保持与系统未校正前的开环增益相一致,接入超前校正网络后,必须另行提高系统的开环增益a 倍来补偿。
五、实验目的:
1.了解和掌握超前校正的原理。 2.了解和掌握利用闭环和开环的对数幅频特性和相频特性完成超前校正网络的参数的计算。 3.掌握在被控系统中如何串入超前校正网络,构建一个性能满足指标要求的新系统的方法。
六、实验内容:
1.观测被控系统的开环对数幅频特性)(ωL 和相频特性)(ω?,幅值穿越频率ωc ,相位裕度γ,按“校正后系统的相位裕度γ′”要求,设计校正参数,构建校正后系统。
2.观测校正前、后的时域特性曲线,並测量校正后系统的相位裕度γ′、超调量Mp 、峰值时间t P 。
3.改变 “校正后系统的相位裕度γ”要求,设计校正参数,构建校正后系统,画出其系统模拟电路图和阶跃响应曲线,观测校正后相位裕度γ′、超调量Mp 、峰值时间t P 填入实验报告。
注:在进行本实验前应熟练掌握使用本实验机的二阶系统开环对数幅频特性和相频特性的测试方法。
七、实验器材(设备、元器件):
LabACTn 自控/计控实验机
八、实验步骤:
1.未校正系统的时域特性的测试 未校正系统模拟电路图见图3-3-2。
图2 未校正系统模拟电路图
图2未校正系统的开环传递函数为:0.3S)
0.2S(16)S (G += 实验步骤: (1) 构造模拟电路:按图2安置短路套及插孔连线,表如下。
(a)安置短路套(b)插孔连线
(2)运行、观察、记录:
选择频域法串联超前校正/超前校正前时域测试,确认信号参数默认值后,点击《下载》、《开始》键后,实验运行,阶跃响应曲线见图3。移动游标测量其超调量、峰值时间及调节时间。
图3 未校正系统的时域特性曲线
在未校正系统的时域特性特性曲线上可测得时域特性:
超调量Mp= 59% 峰值时间tp= 0.336S 调节时间ts= 1.8S(△=5时) 2.未校正系统的频域特性的测试
未校正系统频域特性测试的模拟电路图见图4,与图2比较,该图只是增加了A10(OUT)→B3(ADIN)插孔连线,其余均相同。
图4 未校正系统频域特性测试的模拟电路图
实验步骤:
(1)构造模拟电路:(略)
(2)运行、观察、记录:
①选择频域法串联超前校正/超前校正前频域测试,将弹出频率特性扫描点设置表,用户可在设置表中根据需要填入各个扫描点角频率,设置完后,点击《确认》后,将弹出‘频率特性曲线’实验界面,点击《开始》,即可按表中规定的角频率值,按序自动产生多种频率信号,画出频率特性曲线。
② 测试结束后(约五分钟),将显示被测系统的对数幅频、相频特性曲线(伯德图)和幅相曲线(奈奎斯特图),见图5所示(该图界面“显示选择”选择了“开环-伯德图”)。
③ 在开环对数幅频曲线中,移动L 标尺线到曲线0)(=ωL 处,再移动ω标尺到曲线与0)(=ωL 相交处,
从曲线图左下角读出s rad c /28.9=ω,从开环对数相频曲线中,移动?标尺线到ω标尺线与曲线相交处,从曲线图左下角可读出该角频率的 161=?,计算出相位裕度 19161180=-=γ,见图5。
测得未校正系统频域特性:穿越频率ωc= 9.49rad/s , 相位裕度γ= 19°
图5 未校正系统开环伯德图
3.超前校正网络的设计
① 在未校正系统模拟电路的开环伯德图(图5)上测得未校正系统的相位裕度γ=19°。 ② 如果设计要求校正后系统的相位裕度γ′=52°
则网络的最大超前相位角必须为:
?=?+?-?=+-=4291952'm △γγ?,67.0Sin m =?。
其中△为考虑)'(C C ωωγ<所減的角度,一般取5°~10°。
③ 据式 3-3-3 可计算出网络的参数: 567
.0-10.67
1sin 1sin 1a m m =+=-+=
??
④ 据式 3-3-4 可计算出网络的最大超前相位角m ?处的对数幅频值为:
7dB 10lg510lga )(L m C ===?
⑤ 在系统开环幅频特性曲线(图5)上,移动L 标尺到7dB )(L -=ω处,再移动ω标尺到曲线与7dB )(L -=ω相交处,从曲线图左下角可读出角频率m ω=14.4 rad/s ,见图6,该角频率应是网络的最大超前角频率,这亦是串联超前校正后系统的零分贝频率'c ω。
穿越频率ωc
相位裕度γ
图6 未校正系统开环幅频特性曲线
⑥可计算出计算串联超前校正网络参数:031.024
.214.41
a
1
T m =?=
=
ω,
⑦令 C=1u , 计算出:R4=155K , R5=38.7K 超前校正网络传递函数为: 0.031S
10.155S
151)S (G C ++?
=
⑧为了补偿接入超前校正网络后,被校正系统的开环增益要下降a 倍,必须另行提高系统的开环增益增益a 倍。因为a=5,所以校正后系统另行串入开环增益应等于5的运放A4。 4、串联超前校正后系统的频域特性的测试
串联超前校正后系统频域特性测试的模拟电路图见图7。
图7 串联超前校正后系统频域特性测试的模拟电路图
图7串联超前校正后系统的传递函数为:0.3S)
0.2S(130031S .01155S .0151)S (G +?++?=
图8校正网络(部分)
连线示意图
实验步骤: (1) 构造模拟电路:按图7、图8安置短路套与插孔连线表如下。 (a )安置短路套 (b )插孔连线
期望校正后
穿越频率ωc
-Lc (φm )
(2) 运行、观察、记录:
选择频域法串联超前校正/超前校正后频域测试,运行同《2.未校正系统的频域特性的测试》。
图7的串联超前校正后系统的开环对数幅频、相频曲线(伯德图)见图9所示。
在串联超前校正后的对数幅频曲线中,移动L 标尺线到曲
线0)(=ωL 处,再移动
ω标尺到曲线与0)(=ωL 相交处,从曲线图左下角读出
s rad c /42.14=ω,从开环对数相频曲线中,移动?标尺线到ω标尺线与曲线相交处,从
曲线图左下角读出该角频率的 125=?,计算出相位裕度 55125180=-=γ,见图9。
测得串联超前
校正后系统的频域特性:穿越频率ωc= 14.42 rad/s ,相位裕度
125180-=γ 校正后 穿越频率ω
校正后 相位裕度γ
图9 串联超前校正后系统的伯德图
测试结果表明基本符合设计要求。
5、串联超前校正系统后的时域特性的测试
串联超前校正后系统时域特性测试的模拟电路图见图10,与图7比较,该图只是减少了A10(OUT)→B3(ADIN)插孔连线,其余均相同。
图10 串联超前校正后系统时域特性测试的模拟电路图实验步骤:
(1)构造模拟电路:(略)
(2)运行、观察、记录:
选择频域法串联超前校正/超前校正后时域测试,运行同《1、未校正系统时域特性的测试》,校正后系统的时域特性见图11,移动游标测量其超调量、峰值时间及调节时间,测得时域特性:
超调量Mp= 18.1% 调节时间ts= 0.38S(△=5时) 峰值时间tp=0.2S
测试结果表明基本符合设计要求。
图11 串联超前校正后系统的时域特性曲线
九、实验数据及结果分析:
按下表“校正后系统的相位裕度γ′”设计校正参数,构建校正后系统,画出串联超前校正后系统模拟电路图,及校正前、后的时域特性曲线,並观测校正后系统的相位裕度γ′、超调量Mp,峰值时间t P填入实验报告。
十、实验结论:
十一、总结及心得体会:
十二、对本实验过程及方法、手段的改进建议:
报告评分:
指导教师签字:
电 子 科 技 大 学
实 验 报 告
学生姓名: 学 号: 指导教师: 实验地点:工程训练中心三楼 实验时间:
一、实验室名称:机械系测控实验室 二、实验项目名称:直流电机PID 控制 三、实验学时:2学时 四、实验原理:
直流电机系统的由电机驱动功率放大器、调节器、电机转速检测传感器、F/V 转换器等组成,组成框图如图1所示。
图1 直流电机速度闭环控制系统的组成框图
直流电机是典型的Ⅱ型系统,其开环传函为:
1
/1)(2
++=
s T s T T K s G m m l e
其频率特性主要由电磁时间常数Tl 和机电时间Tm 来决定,在一定条件下可分解成两个一阶惯性环节。根据控制系统的稳定性设计准则,可以采用PD 控制器(不是唯一的校正方法)来对系统进行校正,即利用PD 中的比例微分部分来对消直流伺服系统中时间常数大的一个极点,并使系统的伯德图以-20dB/DEC 的斜率穿越0分贝线,满足稳定性的要求。
直流电机系统的电器原理图如图2所示。
图2 直流电机电器原理图
五、实验目的:
通过直流电机PID控制实验,加深学生对控制理论中稳定性、频率特性等知识的理解,掌握基本的频域设计方法。
六、实验内容:
(1)构造直流电机本体:按图安置短路套及插孔连线;
(2)运行、观察、记录直流电机本体频率特性;
(3)构造模拟PD控制器;
(4)构造负反馈电路;
(5)根据观查得到的电机本体特性,配置PD控制器的时间常数;调整PD控制器的增益;用阶跃信号激励如图2所示的直流电机实验系统,观察系统的时域响应;设置合适的PD控制器增益使超调不超过30%。
七、实验器材(设备、元器件):
LabACTn自控/计控实验机
八、实验步骤:
(1)构造直流电机本体:按图安置短路套及插孔连线,表如下。
(a)插孔连线
(2)运行、观察、记录直流电机本体频率特性:
直流电机可看作是由二个惯性环节串联组成的被控对象,因此可采用二点法确定被控对象参数。对象开环辨识时,须把B1(OUT1)→C2(电机输入), C2(测速输出)→B2(CH2),选择数字PID 控制/被控对象辨识/对象开环辨识,改变给定值为+5V ,点击《下载》;点击《开始》键后,实验运行。在响应曲线上用Y 标尺拖动到3.5V 处,用X 标尺拖动到Y 标尺与响应曲线交接处,从图中可测得t2,同理也可从图中可测得t1。
(3)构造模拟PD 控制器 (a )安置短路套 (b )插孔连线
(4)构造负反馈
(a )安置短路套 (b )插孔连线
(5)运行、观察、记录:
① 根据观查得到的电机本体特性,配置PD 控制器的时间常数,即计算并调整电阻R4,使其对消掉电机本体的一个大时间常数。
② 调整PD 控制器的增益,即调整R 0和R 1的比值; ③ 用阶跃信号激励直流电机实验系统,观察系统的时域响应。记录下增益与超调的关系。设置合适的PD 控制器增益使超调不超过30%。
九、实验数据及结果分析:
画出系统模拟电路图,测量直流电机本体的开环频域特性,填入实验报告。 (1)
(2)计算PD控制器的时间常数及电阻R4的值
(3)调整PD控制器中R0和R1的比值,记录闭环的时域响应,并注出超调不超过30%的增益。
十、实验结论:
直流电机是典型的二阶系统,可用PD控制器对消直流电机的一个极点,并通过调节增益的方式调整闭环系统的穿越频率,实现直流电机的高性能闭环控制。
十一、总结及心得体会:
十二、对本实验过程及方法、手段的改进建议:
报告评分:
指导教师签字:
燕山大学控制工程基础实验报告(带数据)
自动控制理论实验报告 实验一 典型环节的时域响应 院系: 班级: 学号: 姓名:
实验一 典型环节的时域响应 一、 实验目的 1.掌握典型环节模拟电路的构成方法,传递函数及输出时域函数的表达式。 2.熟悉各种典型环节的阶跃响应曲线。 3.了解各项参数变化对典型环节动态特性的影响。 二、 实验设备 PC 机一台,TD-ACC+教学实验系统一套。 三、 实验步骤 1、按图1-2比例环节的模拟电路图将线接好。检查无误后开启设备电源。 注:图中运算放大器的正相输入端已经对地接了100k 电阻。不需再接。 2、将信号源单元的“ST ”端插针与“S ”端插针用“短路块”接好。将信号形式开关设为“方波”档,分别调节调幅和调频电位器,使得“OUT ”端输出的方波幅值为1V ,周期为10s 左右。 3、将方波信号加至比例环节的输入端R(t), 用示波器的“CH1”和“CH2”表笔分别监测模拟电路的输入R(t)端和输出C(t)端。记录实验波形及结果。 4、用同样的方法分别得出积分环节、比例积分环节、惯性环节对阶跃信号的实际响应曲线。 5、再将各环节实验数据改为如下: 比例环节:;,k R k R 20020010== 积分环节:;,u C k R 22000== 比例环节:;,,u C k R k R 220010010=== 惯性环节:。,u C k R R 220010=== 用同样的步骤方法重复一遍。 四、 实验原理、内容、记录曲线及分析 下面列出了各典型环节的结构框图、传递函数、阶跃响应、模拟电路、记录曲线及理论分析。 1.比例环节 (1) 结构框图: 图1-1 比例环节的结构框图 (2) 传递函数: K S R S C =) () ( K R(S) C(S)
过程控制系统实验报告材料(最新版)
实验一、单容水箱特性的测试 一、实验目的 1. 掌握单容水箱的阶跃响应的测试方法,并记录相应液位的响应曲线。 2. 根据实验得到的液位阶跃响应曲线,用相关的方法确定被测对象的特征参数T和传递函数。 二、实验设备 1. THJ-2型高级过程控制系统实验装置 2. 计算机及相关软件 3. 万用电表一只 三、实验原理 图2-1单容水箱特性测试结构图由图2-1可知,对象的被控制量为水箱的液位H,控制量(输入量)是流入水箱中的流量Q1,手动阀V1和V2的开度都为定值,Q2为水箱中流出的流量。根据物料平衡关系,在平衡状态时 Q1-Q2=0 (1)
动态时,则有 Q1-Q2=dv/dt (2) 式中 V 为水箱的贮水容积,dV/dt为水贮存量的变化率,它与 H 的关系为 dV=Adh ,即dV/dt=Adh/dt (3) A 为水箱的底面积。把式(3)代入式(2)得 Q1-Q2=Adh/dt (4) 基于Q2=h/RS,RS为阀V2的液阻,则上式可改写为 Q1-h/RS=Adh/dt 即 ARsdh/dt+h=KQ1 或写作 H(s)K/Q1(s)=K/(TS+1) (5) 式中T=ARs,它与水箱的底积A和V2的Rs有关:K=Rs。 式(5)就是单容水箱的传递函数。 对上式取拉氏反变换得 (6) 当t—>∞时,h(∞)=KR0 ,因而有K=h(∞)/R0=输出稳态值/阶跃输入当 t=T 时,则有 h(T)=KR0(1-e-1)=0.632KR0=0.632h(∞)
式(6)表示一阶惯性环节的响应曲线是一单调上升的指数函数,如图 2-2 所示。当由实验求得图2-2所示的阶跃响应曲线后,该曲线上升到稳态值的63%所对应的时间,就是水箱的时间常数T。该时间常数 T也可以通过坐标原点对响应曲线作切线,切线与稳态值交点所对应的时间就是时间常数T,由响应曲线求得K和T后,就能求得单容水箱的传递函数。如果对象的阶跃响应曲线为图2-3,则在此曲线的拐点D处作一切线,它与时间轴交于B点,与响应稳态值的渐近线交于A点。图中OB即为对象的滞后时间τ,BC为对象的时间常数T,所得 的传递函数为: 四、实验内容与步骤 1.按图2-1接好实验线路,并把阀V1和V2开至某一开度,且使V1的开度大于V2的开度。 2.接通总电源和相关的仪表电源,并启动磁力驱动泵。
控制工程基础实验指导书(答案)
控制工程基础实验指导书 自控原理实验室编印
(内部教材)
实验项目名称: (所属课 程: 院系: 专业班级: 姓名: 学号: 实验日期: 实验地点: 合作者: 指导教师: 本实验项目成绩: 教师签字: 日期: (以下为实验报告正文) 、实验目的 简述本实验要达到的目的。目的要明确,要注明属哪一类实验(验证型、设计型、综合型、创新型)。 二、实验仪器设备 列出本实验要用到的主要仪器、仪表、实验材料等。 三、实验内容 简述要本实验主要内容,包括实验的方案、依据的原理、采用的方法等。 四、实验步骤 简述实验操作的步骤以及操作中特别注意事项。 五、实验结果
给出实验过程中得到的原始实验数据或结果,并根据需要对原始实验数据或结果进行必要的分析、整理或计算,从而得出本实验最后的结论。 六、讨论 分析实验中出现误差、偏差、异常现象甚至实验失败的原因,实验中自己发现了什么问题,产生了哪些疑问或想法,有什么心得或建议等等。 七、参考文献 列举自己在本次准备实验、进行实验和撰写实验报告过程中用到的参考文献资 料。 格式如下 作者,书名(篇名),出版社(期刊名),出版日期(刊期),页码
实验一控制系统典型环节的模拟、实验目的 、掌握比例、积分、实际微分及惯性环节的模拟方法; 、通过实验熟悉各种典型环节的传递函数和动态特性; 、了解典型环节中参数的变化对输出动态特性的影响。 二、实验仪器 、控制理论电子模拟实验箱一台; 、超低频慢扫描数字存储示波器一台; 、数字万用表一只;
、各种长度联接导线。 三、实验原理 运放反馈连接 基于图中点为电位虚地,略去流入运放的电流,则由图 由上式可以求得下列模拟电路组成的典型环节的传递函数及其单位阶跃响应。 、比例环节 实验模拟电路见图所示 U i R i U o 接示波器 以运算放大器为核心元件,由其不同的输入网络和反馈网络组成的各种典型环节,如图所示。图中和为复数阻抗,它们都是构成。 Z2 Z1 Ui ,— U o 接示波器 得:
过程控制系统课程设计报告报告实验报告
成都理工大学工程技术学院《过程控制系统课程设计实验报告》 名称:单容水箱液位过程控制 班级:2011级自动化过程控制方向 姓名: 学号:
目录 前言 一.过程控制概述 (2) 二.THJ-2型高级过程控制实验装置 (3) 三.系统组成与工作原理 (5) (一)外部组成 (5) (二)输入模块ICP-7033和ICP-7024模块 (5) (三)其它模块和功能 (8) 四.调试过程 (9) (一)P调节 (9) (二)PI调节 (10) (三)PID调节 (11) 五.心得体会 (13)
前言 现代高等教育对高校大学生的实际动手能力、创新能力以及专业技能等方面提出了很高的要求,工程实训中心的建设应紧紧围绕这一思想进行。 首先工程实训首先应面向学生主体群,建设一个有较宽适应面的基础训练基地。通过对基础训练设施的 集中投入,面向全校相关专业,形成一定的规模优势,建立科学规范的训练和管理方法,使训练对象获得机械、 电子基本生产过程和生产工艺的认识,并具备一定的实践动手能力。 其次,工程实训的内容应一定程度地体现技术发展的时代特征。为了适应现代化工业技术综合性和多学科交叉的特点,工程实训的内容应充分体现机与电结合、技术与非技术因素结合,贯穿计算机技术应用,以适应科学技术高速发展的要求。应以一定的专项投入,建设多层次的综合训练基地,使不同的训练对象在获得对现代工业生产方式认识的同时,熟悉综合技术内容,初步建立起“大工程”的意识,受到工业工程和环境保护方面的训练,并具备一定的实用技能。 第三,以创新训练计划为主线,依靠必要的软硬件环境,建设创新教育基地。以产品的设计、制造、控制乃至管理为载体,把对学生的创新意识和创新能力的培养,贯穿于问题的观测和判断、创造和评价、建模和设计、仿真和建造的整个过程中。
南理工机械院控制工程基础实验报告
实验1模拟控制系统在阶跃响应下的特性实验 一、实验目的 根据等效仿真原理,利用线性集成运算放大器及分立元件构成电子模拟器, 以干电池作为输入信号,研究控制系统的阶跃时间响应。 二、实验内容 研究一阶与二阶系统结构参数的改变,对系统阶跃时间响应的影响。 三、实验结果及理论分析 1.一阶系统阶跃响应 a. 电容值1uF,阶跃响应波形: b. 电容值2.2uF,阶跃响应波形:
c. 电容值4.4uF,阶跃响应波形: 2?—阶系统阶跃响应数据表 U r= -2.87V R°=505k? R i=500k? R2=496k 其中
T = R2C U c C:)=「(R/R2)U r 误差原因分析: ①电阻值及电容值测量有误差; ②干电池电压测量有误差; ③在示波器上读数时产生误差; ④元器件引脚或者面包板老化,导致电阻变大; ⑤电池内阻的影响输入电阻大小。 ⑥在C=4.4uF的实验中,受硬件限制,读数误差较大3?二阶系统阶跃响应 a.阻尼比为0.1,阶跃响应波形: b.阻尼比为0.5,阶跃响应波形:
4.二阶系统阶跃响应数据表 E R w ( ?) 峰值时间 U o (t p ) 调整时间 稳态终值 超调(%) 震荡次数 C. d. 阻尼比为0.7,阶跃响应波形: 阻尼比为1.0,阶跃响应波形: CHI 反相 带宽限制 伏/格
四、回答问题 1.为什么要在二阶模拟系统中 设置开关K1和K2 ,而且必须 同时动作? 答:K1的作用是用来产生阶跃信号,撤除输入信后,K2则是构成了C2的 放电回路。当K1 一旦闭合(有阶跃信号输入),为使C2不被短路所以K2必须断开,否则系统传递函数不是理论计算的二阶系统。而K1断开后,此时要让 C2尽快放电防止烧坏电路,所以K2要立即闭合。 2.为什么要在二阶模拟系统中设置 F3运算放大器? 答:反相电压跟随器。保证在不影响输入和输出阻抗的情况下将输出电压传递到输入端,作为负反馈。 实验2模拟控制系统的校正实验 一、实验目的 了解校正在控制系统中的作用
过程控制实验报告
过程控制实验 实验报告 班级:自动化1202 姓名:杨益伟 学号:120900321 2015年10月 信息科学与技术学院 实验一过程控制系统建模 作业题目一: 常见得工业过程动态特性得类型有哪几种?通常得模型都有哪些?在Simulink中建立相应模型,并求单位阶跃响应曲线、 答:常见得工业过程动态特性得类型有:无自平衡能力得单容对象特性、有自平衡能力得单容对象特性、有相互影响得多容对象得动态特性、无相互影响得多容对象得动态特性等。通常得模型有一阶惯性模型,二阶模型等、 单容过程模型 1、无自衡单容过程得阶跃响应实例 已知两个无自衡单容过程得模型分别为与,试在Simulink中建立模型,并求单位阶跃响应曲线。 Simulink中建立模型如图所示: 得到得单位阶跃响应曲线如图所示:
2、自衡单容过程得阶跃响应实例 已知两个自衡单容过程得模型分别为与,试在Simulink中建立模型,并求单位阶跃响应曲线。 Simulink中建立模型如图所示: 得到得单位阶跃响应曲线如图所示:
多容过程模型 3、有相互影响得多容过程得阶跃响应实例 已知有相互影响得多容过程得模型为,当参数, 时,试在Simulink中建立模型,并求单位阶跃响应曲线在Simulink中建立模型如图所示:得到得单位阶跃响应曲线如图所示:
4、无相互影响得多容过程得阶跃响应实例 已知两个无相互影响得多容过程得模型为(多容有自衡能力得对象)与(多容无自衡能力得对象),试在Simulink中建立模型,并求单位阶跃响应曲线。 在Simulink中建立模型如图所示: 得到得单位阶跃响应曲线如图所示:
控制工程基础实验指导书(答案) 2..
实验二二阶系统的瞬态响应分析 一、实验目的 1、熟悉二阶模拟系统的组成。 2、研究二阶系统分别工作在ξ=1,0<ξ<1,和ξ> 1三种状态下的单 位阶跃响应。 3、分析增益K对二阶系统单位阶跃响应的超调量σP、峰值时间tp和调 整时间ts。 4、研究系统在不同K值时对斜坡输入的稳态跟踪误差。 5、学会使用Matlab软件来仿真二阶系统,并观察结果。 二、实验仪器 1、控制理论电子模拟实验箱一台; 2、超低频慢扫描数字存储示波器一台; 3、数字万用表一只; 4、各种长度联接导线。 三、实验原理 图2-1为二阶系统的原理方框图,图2-2为其模拟电路图,它是由惯性环节、积分环节和反号器组成,图中K=R2/R1,T1=R2C1,T2=R3C2。 图2-1 二阶系统原理框图
图2-1 二阶系统的模拟电路 由图2-2求得二阶系统的闭环传递函 12 22 122112 /() (1)()/O i K TT U S K U S TT S T S K S T S K TT ==++++ :而二阶系统标准传递函数为 (1)(2), 对比式和式得 n ωξ== 12 T 0.2 , T 0.5 , n S S ωξ====若令则。调节开环增益K 值,不仅能改变系统无阻尼自然振荡频率ωn 和ξ的值,可以得到过阻尼(ξ>1)、 临界阻尼(ξ=1)和欠阻尼(ξ<1)三种情况下的阶跃响应曲线。 (1)当K >0.625, 0 < ξ < 1,系统处在欠阻尼状态,它的单位阶跃响应表达式为: 图2-3 0 < ξ < 1时的阶跃响应曲线 (2)当K =0.625时,ξ=1,系统处在临界阻尼状态,它的单位阶跃响应表达式为: 如图2-4为二阶系统工作临界阻尼时的单位响应曲线。 (2) +2+=222n n n S S )S (G ωξω ω1 ()1sin( ) (3) 2-3n t o d d u t t tg ξωωωω--=+=式中图为二阶系统在欠阻尼状态下的单位阶跃响应曲线 e t n o n t t u ωω-+-=)1(1)(
过程控制仪表实验报告
成绩________ 过程控制仪表及装置实验报告 班级:_______________________________________ 姓名:________________________________________ 学号:________________________________________ 指导老师:_____________________________________ 实验日期:_____________________________________
目录 实验一电容式差压变送器的校验 (2) 实验二热电阻温度变送器的校验 (5) 实验三模拟调节器开环校验 (8) 实验四模拟调节器闭环校验 (12) 实验五SLPC可编程调节器的编程设计与操作 (14) 实验六SLPC可编程调节器PID控制参数整定 (19) 1 实验一电容式差压变送器的校验 一、实验目的 1.了解并熟悉电容式差压变送器整体结构及各种部件的作用。 2.掌握电容式差压变送器的工作原理。 3.掌握电容式差压变送器的起点及终点调整、精度校验、迁移的调整方法。 二、实验项目 1.掌握气动定值器、标准电流表、标准压力表、标准电阻箱的使用方法。2.了解电容式差压变送器整体结构,熟悉各调节螺钉的位置和用途。 3.按照实验步骤进行仪表的起点、终点调整,进行精度、迁移校验。 三、实验设备与仪器 1.电容式差压变送器1台 2.标准电阻箱1个 3.气动定值器1个 4.标准电流表1台 5.标准压力表1个 6.大、小螺丝刀各1把 7.连接导线、气压导管若干 四、实验原理 实验接线如图2-1所示。
清华大学精仪系--控制工程基础--实验内容与实验报告
实验内容 (一)直流电机双环调速系统实验,此时必须松开连轴节!不带动工作台! 1. 测试电流环特性 ,由于外接霍尔传感器只有一套,有五套PWM 放大器有电流输出(接成跟随器方式,其电流采样输出为25芯D 型插座的17(模拟地),19脚,但模拟地是电流环的模拟地,不是实验箱运算放大器OP07的地!所以,只能用万用表量测。多数同学可用手堵转,给定微小的输入电压(小于±50mV )加入到电流环输入端,再加大就必须松开手,观察电机转速能否控制?为什么?如果要测试电流环静态特性,必须用台钳夹住电机轴,保证电机堵转。所以此项实验由教师按图22进行,这里只给出以下数据: 图 22 电流环静态特性实验接线图 (1)霍尔传感器的校准 利用直流稳压电源和电流表校准霍尔传感器,该 传感器为LEM-25,当原边为1匝时,量程为25A ,而原边采用5匝时, 量程为5A ;现在按后者的接法实验,M R 约500Ω。 (2)然后利用它来测试PWM 功率放大器的静态传递系数。电流环的静态特性如表2所示。注意电机是堵转的!
1V;得到通频带400Hz. 2.根据给定参数,利用MATLAB设计速度环的校正装置参数,画出校正前后的Bode图调,到实验室自己接线,教师检查无误后,可以通电调试;首先,正确接线保证系统处于负反馈,如果正反馈会产生什么现象?如何通过开环特性判断测速反馈是负反馈?对此有正确定答案后方能够开始实验。 (1)在1 β和β=0.4~0.5时分别调试校正装置的参数,使其单位阶跃输入的 = 响应曲线超调量最小,峰值时间最短,并记录阶跃响应曲线的特征值; 能够用A/D卡把数据采集到计算机中更好! (2)断开电源,记录最佳的校正装置参数; (3)测试速度环静态特性,为加快测试速度,可直接测试输入电压和测速机电压的关系;在转速低的情况下用手动阻止电机的转动,是否会影响转速? 为什么?分析速度环的机械特性(转速与负载力矩的关系曲线称为机械特 性),从而说明系统的刚度。 (4)有条件的小组可测试速度环频率特性(只测量幅频特性)。 (二)电压-位置伺服系统实验 开始,也必须脱开电机与工作台的连轴节!直到位置环调试好后,再把连轴节连接好! 1.断开使能,手动电机转动,检查电子电位计工作的正确性! 2.让位置环开环,利用调速系统,观察电子电位计在大范围工作的正确性,可利用示波器或万用表测试电位计的输出。 3.位置环要使用实验箱的头2个运算放大器,所以必须注意注意位置反馈的极性;为保证位置反馈是负反馈,必须通过位置系统开环来判断,这时位置调节器只利用比例放大器,如果发现目前的接线是正反馈后,怎么接线? 4.将位置环的位置反馈正确接到反馈输入端,利用给定指令电位计,移动它,使电机位置按要求转动。正确后,即可把连轴节连接好,连接连轴节时用专用内六角扳手。这时应该断电! 5.按设计的校正装置连接好,再上电。测试具有比例放大器和近似比例积分调节器时的阶跃响应曲线,并记录之; 6.测试输入电压-位置的传递特性曲线; 7.用手轮加小力矩估计系统的(电弹簧)刚度。 三、实验报告要求 (一)速度环实验 1.对速度环建模,画出速度环方块图,传递函数图 2.画出校正前后的Bode图,设计校正装置及其参数; 3.写出实验原始数据,整理出静态曲线和动态数据; 4.从理论和实际的结合上,分析速度环的特点,并写出实验的收获和改进意见; (二)位置环实验 1.对位置环建模,画出位置环方块图,传递函数图;
计算机过程控制实验报告
计算机过程控制实验报告
实验1 单容水箱液位数学模型的测定实验 1、试验方案: 水流入量Qi 由调节阀u 控制,流出量Qo 则由用户通过负载阀R 来改变。被调量为水位H 。分析水位在调节阀开度扰动下的动态特性。 直接在调节阀上加定值电流,从而使得调节阀具有固定的开度。(可以通过智能调节仪手动给定,或者AO 模块直接输出电流。) 调整水箱出口到一定的开度。 突然加大调节阀上所加的定值电流观察液位随时间的变化,从而可以获得液位数学模型。 通过物料平衡推导出的公式: μμk Q H k Q i O ==, 那么 )(1 H k k F dt dH -=μμ, 其中,F 是水槽横截面积。在一定液位下,考虑稳态起算点,公式可以转换成 μμR k H dt dH RC =+。 公式等价于一个RC 电路的响应函数,C=F 就是水容,k H R 0 2= 就是水阻。 如果通过对纯延迟惯性系统进行分析,则单容水箱液位数学模型可以使用以下S 函数表示: ) 1()(0 += TS S KR S G 。 相关理论计算可以参考清华大学出版社1993年出版的《过程控制》,金以慧编著。 2、实验步骤: 1) 在现场系统A3000-FS 上,将手动调节阀JV201、JV206完全打开,使下水箱闸板具有 一定开度,其余阀门关闭。 2) 在控制系统A3000-CS 上,将下水箱液位(LT103)连到内给定调节仪输入端,调节仪 输出端连到电动调节阀(FV101)控制信号端。 3) 打开A3000-CS 电源,调节阀通电。打开A3000-FS 电源。 4) 在A3000-FS 上,启动右边水泵(即P102),给下水箱(V104)注水。 给定值 图1 单容水箱液位数学模型的测定实验
机械控制工程基础实验指导书(07年)
中北大学 机械工程与自动化学院 实验指导书 课程名称:《机械工程控制基础》 课程代号:02020102 适用专业:机械设计制造及其自动化 实验时数:4学时 实验室:数字化实验室 实验内容:1.系统时间响应分析 2.系统频率特性分析 机械工程系 2010.12
实验一 系统时间响应分析 实验课时数:2学时 实验性质:设计性实验 实验室名称:数字化实验室 一、实验项目设计内容及要求 1.试验目的 本实验的内容牵涉到教材的第3、4、5章的内容。本实验的主要目的是通过试验,能够使学生进一步理解和掌握系统时间响应分析的相关知识,同时也了解频率响应的特点及系统稳定性的充要条件。 2.试验内容 完成一阶、二阶和三阶系统在单位脉冲和单位阶跃输入信号以及正弦信号作用下的响应,求取二阶系统的性能指标,记录试验结果并对此进行分析。 3.试验要求 学习教材《机械工程控制基础(第5版)》第2、3章有关MA TLAB 的相关内容,要求学生用MA TLAB 软件的相应功能,编程实现一阶、二阶和三阶系统在几种典型输入信号(包括单位脉冲信号、单位阶跃信号、单位斜坡信号和正弦信号)作用下的响应,记录结果并进行分析处理:对一阶和二阶系统,要求用试验结果来分析系统特征参数对系统时间响应的影响;对二阶系统和三阶系统的相同输入信号对应的响应进行比较,得出结论。 4.试验条件 利用机械工程与自动化学院数字化试验室的计算机,根据MA TLAB 软件的功能进行简单的编程来进行试验。 二、具体要求及实验过程 1.系统的传递函数及其MA TLAB 表达 (1)一阶系统 传递函数为:1 )(+= Ts K s G 传递函数的MA TLAB 表达: num=[k];den=[T,1];G(s)=tf(num,den) (2)二阶系统 传递函数为:2 2 2 2)(n n n w s w s w s G ++= ξ 传递函数的MA TLAB 表达: num=[2n w ];den=[1,ξ2wn ,wn^2];G(s)=tf(num,den) (3)任意的高阶系统 传递函数为:n n n n m m m m a s a s a s a b s b s b s b s G ++++++++= ----11 101110)( 传递函数的MA TLAB 表达: num=[m m b b b b ,,,110- ];den=[n n a a a a ,,,110- ];G(s)=tf(num,den)
过程控制系统实验报告
实验一过程控制系统的组成认识实验 过程控制及检测装置硬件结构组成认识,控制方案的组成及控制系统连接 一、过程控制实验装置简介 过程控制是指自动控制系统中被控量为温度、压力、流量、液位等变量在工业生产过程中的自动化控制。本系统设计本着培养工程化、参数化、现代化、开放性、综合性人才为出发点。实验对象采用当今工业现场常用的对象,如水箱、锅炉等。仪表采用具有人工智能算法及通讯接口的智能调节仪,上位机监控软件采用MCGS工控组态软件。对象系统还留有扩展连接口,扩展信号接口便于控制系统二次开发,如PLC控制、DCS控制开发等。学生通过对该系统的了解和使用,进入企业后能很快地适应环境并进入角色。同时该系统也为教师和研究生提供一个高水平的学习和研究开发的平台。 二、过程控制实验装置组成 本实验装置由过程控制实验对象、智能仪表控制台及上位机PC三部分组成。 1、被控对象 由上、下二个有机玻璃水箱和不锈钢储水箱串接,4.5千瓦电加热锅炉(由不锈钢锅炉内胆加温筒和封闭外循环不锈钢锅炉夹套构成),压力容器组成。 水箱:包括上、下水箱和储水箱。上、下水箱采用透明长方体有机玻璃,坚实耐用,透明度高,有利于学生直接观察液位的变化和记录结果。水箱结构新颖,内有三个槽,分别是缓冲槽、工作槽、出水槽,还设有溢流口。二个水箱可以组成一阶、二阶单回路液位控制实验和双闭环液位定值控制等实验。 模拟锅炉:锅炉采用不锈钢精致而成,由两层组成:加热层(内胆)和冷却层(夹套)。做温度定值实验时,可用冷却循环水帮助散热。加热层和冷却层都有温度传感器检测其温度,可做温度串级控制、前馈-反馈控制、比值控制、解耦控制等实验。 压力容器:采用不锈钢做成,一大一小两个连通的容器,可以组成一阶、二阶单回路压力控制实验和双闭环串级定值控制等实验。 管道:整个系统管道采用不锈钢管连接而成,彻底避免了管道生锈的可能性。为了提高实验装置的使用年限,储水箱换水可用箱底的出水阀进行。 2、检测装置 (液位)差压变送器:检测上、下二个水箱的液位。其型号:FB0803BAEIR,测量范围:0~1.6KPa,精度:0.5。输出信号:4~20mA DC。 涡轮流量传感器:测量电动调节阀支路的水流量。其型号:LWGY-6A,公称压力:6.3MPa,精度:1.0%,输出信号:4~20mA DC 温度传感器:本装置采用了两个铜电阻温度传感器,分别测量锅炉内胆、锅炉夹套的温度。经过温度传感器,可将温度信号转换为4~20mA DC电流信号。 (气体)扩散硅压力变送器:用来检测压力容器内气体的压力大小。其型号:DBYG-4000A/ST2X1,测量范围:0.6~3.5Mpa连续可调,精度:0.2,输出信号为4~20mA DC。 3、执行机构 电气转换器:型号为QZD-1000,输入信号为4~20mA DC,输出信号:20~100Ka气压信号,输出用来驱动气动调节阀。 气动薄膜小流量调节阀:用来控制压力回路流量的调节。型号为ZMAP-100,输入信号为4~20mA DC或0~5V DC,反馈信号为4~20mA DC。气源信号 压力:20~100Kpa,流通能力:0.0032。阀门控制精度:0.1%~0.3%,环境温度:-4~+200℃。 SCR移相调压模块:采用可控硅移相触发装置,输入控制信号0~5V DC或4~20mA DC 或10K电位器,输出电压变化范围:0~220V AC,用来控制电加热管加热。 水泵:型号为UPA90,流量为30升/分,扬程为8米,功率为180W。
南京理工大学控制工程基础实验报告
《控制工程基础》实验报告 姓名欧宇涵 914000720206 周竹青 914000720215 学院教育实验学院 指导老师蔡晨晓 南京理工大学自动化学院 2017年1月
实验1:典型环节的模拟研究 一、实验目的与要求: 1、学习构建典型环节的模拟电路; 2、研究阻、容参数对典型环节阶跃响应的影响; 3、学习典型环节阶跃响应的测量方法,并计算其典型环节的传递函数。 二、实验内容: 完成比例环节、积分环节、比例积分环节、惯性环节的电路模拟实验,并研究参数变化对其阶跃响应特性的影响。 三、实验步骤与方法 (1)比例环节 图1-1 比例环节模拟电路图 比例环节的传递函数为:K s U s U i O =)()(,其中1 2R R K =,参数取R 2=200K ,R 1=100K 。 步骤: 1、连接好实验台,按上图接好线。 2、调节阶跃信号幅值(用万用表测),此处以1V 为例。调节完成后恢复初始。 3、Ui 接阶跃信号、Uo 接IN 采集信号。 4、打开上端软件,设置采集速率为“1800uS”,取消“自动采集”选项。 5、点击上端软件“开始”按键,随后向上拨动阶跃信号开关,采集数据如下图。 图1-2 比例环节阶跃响应
(2)积分环节 图1-3 积分环节模拟电路图 积分环节的传递函数为: S T V V I I O 1 -=,其中T I =RC ,参数取R=100K ,C=0.1μf 。 步骤:同比例环节,采集数据如下图。 图1-4 积分环节阶跃响应 (3)微分环节 图1-5 微分环节模拟电路图 200K R V I Vo C 2C R 1 V I Vo 200K
过程控制实验报告
东南大学自动化学院 实验报告 课程名称:过程控制实验 实验名称:水箱液位控制系统 院(系):自动化专业:自动化姓名:学号: 实验室:实验组别: 同组人员: 实验时间: 评定成绩:审阅教师:
目录 一、系统概论 (3) 二、对象的认识 (4) 三、执行机构 (14) 四、单回路调节系统 (15) 五、串级调节系统Ⅰ (18) 六、串级调节系统Ⅱ (19) 七、前馈控制 (21) 八、软件平台的开发 (21)
一、系统概论 1.1实验设备 图1.1 实验设备正面图图1.2 实验设备背面图 本实验设备包含水箱、加热器、变频器、泵、电动阀、电磁阀、进水阀、出水阀、增压器、流量计、压力传感器、温度传感器、操作面板等。 1.1.2 铭牌 ·加热控制器: 功率1500w,电源220V(单相输入) ·泵: Q40-150L/min,H2.5-7m,Hmax2.5m,380V,VL450V, IP44,50Hz,2550rpm,1.1kw,HP1.5,In2.8A,ICL B ·全自动微型家用增压器: 型号15WZ-10,单相电容运转马达 最高扬程10m,最大流量20L/min,级数2,转速2800rmp,电压220V, 电流0.36A,频率50Hz,电容3.5μF,功率80w,绝缘等级 E ·LWY-C型涡轮流量计: 口径4-200mm,介质温度-20—+100℃,环境温度-20—+45℃,供电电源+24V, 标准信号输出4-20mA,负载0-750Ω,精确度±0.5%Fs ±1.0%Fs,外壳防护等级 IP65 ·压力传感器 YMC303P-1-A-3 RANGE 0-6kPa,OUT 4-20mADC,SUPPLY 24VDC,IP67,RED SUP+,BLUE OUT+/V- ·SBWZ温度传感器 PT100 量程0-100℃,精度0.5%Fs,输出4-20mADC,电源24VDC
2016热工过程控制实验报告——姜栽沙
热工过程控制工程 实验报告 专业班级:新能源1402班 学生姓名:姜栽沙 学号:1004140220 中南大学能源学院 2017年1月
实验一热工过程控制系统认识与MCGS应用 组号______ 同组成员李博、许克伟、成绩__________ 实验时间__________ 指导教师(签名)___________ 一、实验目的 通过实验了解几种控制系统(基于智能仪表、基于计算机)的组成、工作原理、控制过程特点;了解计算机与智能仪表的通讯方式。了解组态软件的功能和特点,熟悉MCGS组态软件实现自动控制系统的整个过程。掌握MCGS组态软件提供的一些基本功能,如基本画面图素的绘制、动画连接的使用、控制程序的编写、构造实时数据库。 二、实验装置 1、计算机一台 2、MCGS组态软件一套 3、对象:SK-1-9型管状电阻炉一台;测温热电偶一支(K型)。 4、AI818/宇电519/LU-906K智能调节仪组成的温控器一台。 5、THKGK-1型过程控制实验装置(含智能仪表、PLC、变频器、控制阀)一套 6、CST4001-6H电阻炉检定炉(含电阻炉、温度控制器、测温元件、接口)一套 7、电阻炉温度控制系统接线图和方框图如图1-1、1-2所示。 三、实验内容 1、电阻炉温度控制系统(液位、流量、压力) 被控过程: 电阻炉被控变量: 电阻炉温度 操纵变量: 电阻炉的功率主要扰动:环境温度变化,电压值,电流值2、带检测控制点的流程图 3、控制系统方框图
4、控制系统中所用的仪表名称、型号(检测仪表、控制器、执行器、显示仪表)。 检测仪表:CST4001-6H电阻炉检定炉 控制器:AI818/宇电519/LU-906K智能调节仪组成的温控器 执行器:THKGK-1型过程控制实验装置(含智能仪表、PLC、变频器、控制阀) 显示仪表:计算机 5、智能仪表与计算机是怎样进行通讯?有哪几种方式? 智能仪表与计算机通讯一般有三种方式,分别为USB接口,485接口,232接口,通过这些接口进行信号传输,计算机得以对仪表进行温控。 6、什么是组态软件? 组态软件是指对系统的各种资源进行配置,达到系统按照预定设置,自动执行特定任务,满足使用者要求的目的的应用软件。 四、MCGS组态界面 提供电阻炉温度控制系统一套完整组态界面图(共6个图),包括主界面、运行界面、设备工况、存盘数据、实时曲线、历史数据。
南理工 机械院 控制工程基础实验报告
页眉 实验1 模拟控制系统在阶跃响应下的特性实验一、实验目的 根据等效仿真原理,利用线性集成运算放大器及分立元件构成电子模拟器,以干电池作为输入信号,研究控制系统的阶跃时间响应。 二、实验内容 研究一阶与二阶系统结构参数的改变,对系统阶跃时间响应的影响。 三、实验结果及理论分析 1.一阶系统阶跃响应 a.电容值1uF,阶跃响应波形: b.电容值2.2uF,阶跃响应波形: 页脚 页眉
,阶跃响应波形:电容值c.4.4uF 阶系统阶跃响应数据表2.一稳态终值U(∞)(V)时间常数T(s) 电容值c(uF)理论值实际值实际值理论值0.50 2.87 1.0 0.51 2.90 1.07 2.90 2.2 2.87 1.02 2.06 2.90 2.87 4.4 2.24 元器件实测参数=505kU= -2.87V R? R=496k? =500kR?2o1r其中 T?RC2U(?)??(R/R)U rc21页脚 页眉 误差原因分析: ①电阻值及电容值测量有误差;
②干电池电压测量有误差; ③在示波器上读数时产生误差; ④元器件引脚或者面包板老化,导致电阻变大; ⑤电池内阻的影响输入电阻大小。 ⑥在C=4.4uF的实验中,受硬件限制,读数误差较大。 3.二阶系统阶跃响应 a.阻尼比为0.1,阶跃响应波形: b.阻尼比为0.5,阶跃响应波形: 页脚 页眉 ,阶跃响应波形:0.7c.阻尼比为
,阶跃响应波形:阻尼比为1.0d. 阶系统阶跃响应数据表4.二ξR(?)峰值时间U(t) 调整时间稳态终值超调(%)震荡次数pow M()t)t(s V()(s UV)N psps6 62.7 2.8 0.3 0.1 2.95 454k 4.8 1 0.5 0.5 3.3 52.9k 2.95 11.9 0.4 1 0.7 0.3 0.4 24.6k 3.0 2.7 2.92 1.0 1.0 2.98 1.0 2.97k 2.98 页脚 页眉 四、回答问题
过程控制系统实验报告
《过程控制系统实验报告》 院-系: 专业: 年级: 学生姓名: 学号: 指导教师: 2015 年6 月
过程控制系统实验报告 部门:工学院电气工程实验教学中心实验日期:年月日 姓名学号班级成绩 实验名称实验一单容水箱液位定值控制实验学时 课程名称过程控制系统实验及课程设计教材过程控制系统 一、实验仪器与设备 A3000现场系统,任何一个控制系统,万用表 二、实验要求 1、使用比例控制进行单溶液位进行控制,要求能够得到稳定曲线,以及震荡曲线。 2、使用比例积分控制进行流量控制,能够得到稳定曲线。设定不同的积分参数,进行 比较。 3、使用比例积分微分控制进行流量控制,要求能够得到稳定曲线。设定不同的积分参数,进行比较。 三、实验原理 (1)控制系统结构 单容水箱液位定值(随动)控制实验,定性分析P, PI,PD控制器特性。 水流入量Qi由调节阀u控制,流出量Qo则由用户通过负载阀R来改变。被调量为水位H。使用P,PI , PID控制,看控制效果,进行比较。 控制策略使用PI、PD、PID调节。 (2)控制系统接线表 使用ADAM端口测量或控制量测量或控制量标号使用PLC端 口 锅炉液位LT101 AI0 AI0 调节阀FV101 AO0 AO0 四、实验内容与步骤 1、编写控制器算法程序,下装调试;编写测试组态工程,连接控制器,进行联合调试。这些步骤不详细介绍。
2、在现场系统上,打开手阀QV-115、QV-106,电磁阀XV101(直接加24V到DOCOM,GND到XV102控制端),调节QV-116闸板开度(可以稍微大一些),其余阀门关闭。 3、在控制系统上,将液位变送器LT-103输出连接到AI0,AO0输出连到变频器U-101控制端上。 注意:具体哪个通道连接指定的传感器和执行器依赖于控制器编程。对于全连好线的系统,例如DCS,则必须安装已经接线的通道来编程。 4、打开设备电源。包括变频器电源,设置变频器4-20mA的工作模式,变频器直接驱动水泵P101。 5、连接好控制系统和监控计算机之间的通讯电缆,启动控制系统。 6、启动计算机,启动组态软件,进入测试项目界面。启动调节器,设置各项参数,将调节器的手动控制切换到自动控制。 7、设置PID控制器参数,可以使用各种经验法来整定参数。这里不限制使用的方法。 五、实验结果记录及处理 六、实验心得体会: 比例控制特性:能较快克服扰动的影响,使系统稳定下来,但有余差。 比例积分特性:能消除余差,它能适用于控制通道时滞较小、负荷变化不大、被控量不允许由余差的场合。 比例微分特性:对于改善系统的动态性能指标,有显著的效果。
控制工程-实验指导书-修订版
《控制工程基础》实验指导书常熟理工学院机械工程学院 2009.9
目录 1.MATLAB时域分析实验 (2) 2.MATLAB频域分析实验 (4) 3.Matlab校正环节仿真实验 (8) 4.附录:Matlab基础知识 (14)
实验1 MATLAB 时域分析实验 一、实验目的 1. 利用MATLAB 进行时域分析和仿真。 要求:(1)计算连续系统的时域响应(单位脉冲输入,单位阶跃输入,任意输入)。 2.掌握Matlab 系统分析函数impulse 、step 、lsim 、roots 、pzmap 的应用。 二、实验内容 1.已知某高阶系统的传递函数为 ()265432 220501584223309240100 s s G s s s s s s s ++=++++++,试求该系统的单位脉冲响应、单位阶跃响应、单位速度响应和单位加速度响应。 MATLAB 计算程序 num=[2 20 50]; den=[1 15 84 223 309 240 100]; t= (0: 0.1: 20); figure (1); impulse (num,den,t); %Impulse Response figure (2); step(num,den,t);%Step Response figure (3); u1=(t); %Ramp.Input hold on; plot(t,u1); lsim(num,den,u1,t); %Ramp. Response gtext(‘t’); figure (4); u2=(t.*t/2);%Acce.Input u2=(0.5*(t.*t)) hold on; plot(t,u2); lsim(num,den,u2,t);%Acce. Response
过程控制工程实验报告
成绩________ 过程控制工程 实验报告 班级:自动化10-2 姓名: 曾鑫 学号:10034080239 指导老师:康珏
实验一液位对象特性测试(计算机控制)实验 一、实验目的 通过实验掌握对象特性的曲线的测量的方法,测量时应注意的问题,对象模型参数的求取方法。 二、实验项目 1.认识实验系统,了解本实验系统中的各个对象。 2.测试上水箱的对象特性。 三、实验设备与仪器 1.水泵Ⅰ 2.变频器 3.压力变送器 4.主回路调节阀
m in y ?——被测量的变化量 m ax y ——被测量的上限值 m in y ——被测量的下限值 2) 一阶对象传递函数 s e s T K G τ-+= 1 00 K ——广义对象放大倍数(用前面公式求得) 0T ——广义对象时间常数(为阶跃响应变化到新稳态值的63.2%所需要的时间) τ——广义对象时滞时间(即响应的纯滞后,直接从图测量出) 五、注意事项 1. 测量前要使系统处于平衡状态下,反应曲线的初始点应是输入信号的开始作阶跃信号的 瞬间,这一段时间必须在记录纸上标出,以便推算出纯滞后时间τ。测量与记录工作必须 2. 所加扰动应是额定值的10%左右。 六、实验说明及操作步骤
1.了解本实验系统中各仪表的名称、基本原理以及功能,掌握其正确的接线与使用方法,以便于在实验中正确、熟练地操作仪表读取数据。熟悉实验装置面板图,做到根据面板上仪表的图形、文字符号找到该仪表。熟悉系统构成和管道的结构,认清电磁阀和手动阀的位置及其作用。 2.将上水箱特性测试(计算机控制)所用实验设备,参照流程图和系统框图接好实验线路。 3.确认接线无误后,接通电源。 4.运行组态王,在工程管理器中启动“上水箱液位测试实验” 阶液位对象。 按钮观察输出曲线。 6.在 会影响系统稳定所需的时间)。 7.改变u(k)输出,给系统输入幅值适宜的正向阶跃信号(阶跃信号在5%-15%之间),使系统的输出信号产生变化,上水箱液位将上升到较高的位置逐渐进入稳态。 8.观察计算机中上水箱液位的正向阶跃响应曲线,直至达到新的平衡为止。 9.改变u(k)输出,给系统输入幅值与正向阶跃相等的一个反向阶跃信号,使系统的输出信号产生变化,上水箱液将下降至较低的位置逐渐进入稳态。 10. 为止。 11.曲线的分析处理,对实验的记录曲线分别进行分析和处理,处理结果记录于表格2-1。 七、实验报告
南理工控制工程基础实验报告
南理工控制工程基础实验报告 成绩:《控制工程基础》课程实验报告班级:学号:姓名:南京理工大学2015年12月《控制工程基础》课程仿真实验一、已知某单位负反馈系统的开环传递函数如下G(s)?10 s2?5s?25借助MATLAB和Simulink完成以下要求:(1) 把G(s)转换成零极点形式的传递函数,判断开环系统稳定性。>> num1=[10]; >> den1=[1 5 25]; >> sys1=tf(num1,den1) 零极点形式的传递函数:于极点都在左半平面,所以开环系统稳定。(2) 计算闭环特征根并判别系统的稳定性,并求出闭环系统在0~10秒内的脉冲响应和单位阶跃响应,分别绘出响应曲线。>> num=[10];den=[1,5,35]; >>
sys=tf(num,den); >> t=[0::10]; >> [y,t]=step(sys,t); >> plot(t,y),grid >> xlabel(‘time(s)’) >> ylabel(‘output’) >> hold on; >> [y1,x1,t]=impulse(num,den,t); >> plot(t,y1,’:’),grid (3) 当系统输入r(t)?sin5t时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。曲线:二、某单位负反馈系统的开环传递函数为:6s3?26s2?6s?20G(s)?4频率范围??[,100] s?3s3?4s2?2s?2 绘制频率响应曲线,包括Bode图和幅相曲线。>> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> bode(sys,{,100}) >> grid on >> clear; >> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> [z , p , k] = tf2zp(num, den); >> nyquist(sys) 根据Nyquist判据判定系统的稳定性。