西工大飞行力学大作业1

第一次飞行力学作业 姓名:王涛 班级:02021101 学号:2011302624
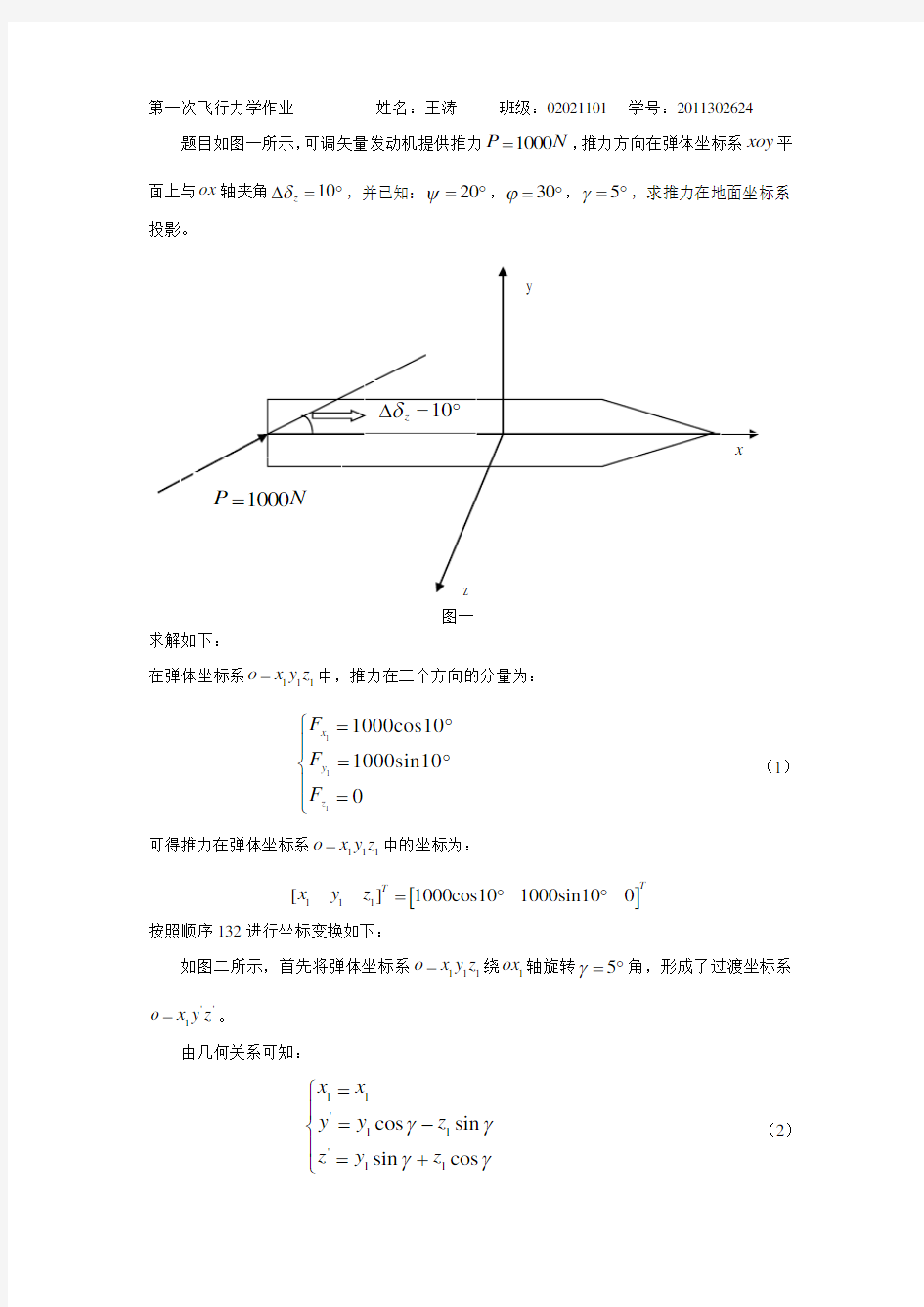
题目如图一所示,可调矢量发动机提供推力1000P N =,推力方向在弹体坐标系xoy 平面上与ox 轴夹角10z δ?=?,并已知:20ψ=?,30?=?,5γ=?,求推力在地面坐标系投影。
图一
求解如下:
在弹体坐标系111o x y z -中,推力在三个方向的分量为:
1111000cos101000sin100
x y z F F F ?=??
=???
=? (1) 可得推力在弹体坐标系111o x y z -中的坐标为:
[]11
1[]1000cos101000sin100T
T x y z =??
按照顺序132进行坐标变换如下:
如图二所示,首先将弹体坐标系111o x y z -绕1ox 轴旋转5γ=?角,形成了过渡坐标系
''1o x y z -。
由几何关系可知:
11'
11'
11cos sin sin cos x x y y z z y z γγγγ
=??=-??=+? (2)
10z δ?=?
x
y
z 1000P N =
图二:坐标第一步转换图
则转换到坐标系''1o x y z -后的分量列阵为:
11'1'1()x x x y L y z z γ????????=????????????
(3) 式中的基元变换矩阵:
100
()0cos sin 0sin cos x L γγγγγ??
??=-??????
(4)
如图三所示,然后将弹体坐标系''1o x y z -绕'
oz 轴旋转30?=?角,形成了过渡坐标系
''o x yz -。
图三:坐标变换图第二步
由几何关系可知:
30?=?
1
x '
y '
x y
o
5γ=?
1z
'z
1y 'y
o
''1'1''cos sin sin cos x x y y x y z z ?????=-?
=+??=?
(5)
则转换到坐标系''1o x y z -后的分量列阵为:
'1'''()z x x y L y z z ?????????=????????????
(6)
式中的基元变换矩阵:
cos sin 0()sin cos 00
1z L ?
????
-????=??????
(7) 如图四所示,首先将弹体坐标系''o x yz -绕oy 轴旋转20ψ=?角,形成了地面坐标系
A xyz -。
图四:地面坐标系
由几何关系可知:
''''sin cos cos sin x z x y y
z z x ψψψψ?=+?
=??=-?
(8)
则转换到坐标系''1o x y z -后的分量列阵为:
'
x x
20ψ=?
'
z z
A
''()y x x y L y z z ψ????
??
??=????
????????
(9) 式中的基元变换矩阵:
cos 0sin ()010sin 0cos y L ψ
ψψψ
ψ????=????-??
(10) 因此可得由弹体坐标系到地面坐标系的坐标变换矩阵:
(,,)()()()y z x L L L L λ?ψψ?γ= (11) 可得:
111(,,)x x y L y z z λ?ψ????????=????????????
(12) 式中的基元变换矩阵:
cos cos sin cos cos sin sin sin cos sin sin cos (,,)=sin cos cos cos sin cos sin sin sin cos cos sin sin sin sin cos cos L ?ψ
?ψγψγ?ψγψγλ?ψ?
?γ
?γ?ψ
?ψγψγ
?ψγψγ-++??
??-??
??-+-+??
(13) 带入数据得:
0.8138 -0.4382 0.3817(,,)= 0.5000 0.8627 -0.0755 -0.2962 0.2523 0.9212L λ?ψ??
????
????
(14)
得到推力在地面坐标系的投影为:
725.3331 642.2154 -247.8939x y z ????????=????????????
(15) 计算代码:
a=30/180*pi;b=20/180*pi;c=5/180*pi;d=10/180*pi; L=[cos(a)*cos(b) -sin(a)*cos(b)*cos(c)+sin(b)*sin(c) sin(a)*cos(b)*sin(c)+sin(b)*cos(c); sin(a) cos(a)*cos(c) -cos(a)*sin(c);
-cos(a)*sin(b) sin(a)*sin(b)*cos(c)+cos(b)*sin(c) -sin(a)*sin(b)*sin(c)+cos(b)*cos(c)]; ox1y1z1=[1000*cos(d) 1000*sin(d) 0]
航空航天概论试卷
绝密★启用前 北京航空航天大学现代远程教育 201103学期《航空航天概论》试卷A ☆注意事项:1、本考卷满分:100分;考试时间:90分钟;考试形式:闭卷; 2、考生务必将自己的姓名、学号、学习中心名称填写在试卷及答题纸密封 线内,答案写在答题纸上,写在考卷上的不记分; 3、答题完毕,将试卷和答题纸一起上交。 一、填空题(本大题共20小题,每小题2分,共40分) 1、在第一代“协和”号超声速客机退役、第二代超声速客机何时问世尚无着落的情况下, 苏霍伊设计局和美国格鲁门合作,提出___公务机概念。 2、A129“猫鼬”直升机,是___陆军引以自豪的尖端“低空利器”。 3、___“眼镜蛇”是世界上第一种专门研制的武装攻击直升机。 4、目前载人航天器内压力为千帕,而舱外航天服内的压力是___千帕。 5、___年,美国专利局正式授予莱特兄弟飞机设计专利。 6、飞机飞行必须依靠机翼产生升力,升力与空气的密度成___关系。 7、大气层气体含量最高的是氮气,其次是___。 8、使用钛合金最多的飞机是___。 9、耶格尔是美国着名飞行员和试飞员,1947年10月14日,他驾驶X-1火箭动力研究机在 世界上首次突破___。 10、专用气闸舱一般能容纳___名航天员。 11、俄罗斯航天员预吸氧的时间是___分钟。 12、用失重飞机作抛物线飞行可产生___秒左右的失重。 13、月球上可能有水冰,且引力只有___,有望成为载人探索火星的跳板。 14、月球基地必须包括2个最基本、也是最重要的设施,那就是可供航天员在生活和工作的 加压居住舱和___。 15、勇气号和机遇号配置了___台光谱仪。 16、亚表面探测雷达/高度计,用以查找火星的___ 。 17、支线客机是相对于干线客机而言,按飞行航线划分的一类飞机,一般指飞行于小城市之 间或小城市至中心城市间,飞机座位数在___座以下的客机。 18、在A380超大型客机项目启动前,空客的设计师们已经秘密工作了好几年。关于机体的 设计方案,最初就有好几个。如两个A340机身挤压在一起的方案;飞翼方案;最终确定的是全长度___布局。 19、我国通用航空飞行时间主要是空中作业,而美国通用航空飞行时间60%是___。 20、由中航工业集团公司自主研制的___大型民用直升机将于3月中旬在江西首飞。该机最 大起飞重量为吨,一次搭载27名乘客或运送15名伤员,最大航程为900千米。
凸轮机构大作业___西工大机械原理要点
大作业(二) 凸轮机构设计 (题号:4-A) (一)题目及原始数据···············(二)推杆运动规律及凸轮廓线方程·········(三)程序框图········· (四)计算程序·················
(五)程序计算结果及分析·············(六)凸轮机构图·················(七)心得体会··················(八)参考书··················· 一题目及原始数据 试用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计 (1)推程运动规律为五次多项式运动规律,回程运动规律为余弦加速度运动规律; (2)打印出原始数据; (3)打印出理论轮廓和实际轮廓的坐标值; (4)打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角;(5)打印出凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角; (6)打印最后所确定的凸轮的基圆半径。 表一偏置直动滚子推杆盘形凸轮机构的已知参数 题号初选的 基圆半 径 R0/mm 偏距 E/mm 滚子 半径 Rr/m m 推杆行 程 h/mm 许用压力角许用最小曲率半径 [ρamin] [α1] [α2] 4-A 15 5 10 28 30°70?0.3Rr 计算点数:N=90 q1=60; 近休止角δ1 q2=180; 推程运动角δ2 q3=90; 远休止角δ3 q4=90; 回程运动角δ4 二推杆运动规律及凸轮廓线方程推杆运动规律: (1)近休阶段:0o≤δ<60 o s=0;
ds/dδ=0; 2/δd 2 d=0; s (2)推程阶段:60o≤δ<180 o 五次多项式运动规律: Q1=Q-60; s=10*h*Q1*Q1*Q1/(q2*q2*q2)-15*h*Q1*Q1*Q1*Q1/(q2*q2*q2*q2)+6*h*Q1*Q1*Q 1*Q1*Q1/(q2*q2*q2*q2*q2); ds/dδ =30*h*Q1*Q1*QQ/(q2*q2*q2)-60*h*Q1*Q1*Q1*QQ/(q2*q2*q2*q2)+30*h*Q1*Q1*Q 1*Q1*QQ/(q2*q2*q2*q2*q2); 2/δd 2 d=60*h*Q1*QQ*QQ/(q2*q2*q2)-180*h*Q1*Q1*QQ*QQ/((q2*q2*q2*q2))+1 s 20*h*Q1*Q1*Q1*QQ*QQ/((q2*q2*q2*q2*q2)); (3)远休阶段:180o≤δ<270 o s=h=24; ds/dδ=0; 2/δd 2 d=0; s (4)回程阶段:270≤δ<360 Q2=Q-270; s=h*(1+cos(2*Q2/QQ))/2; ds/dδ=-h*sin(2*Q2/QQ); 2/δd 2 d=-2*h*cos(2*Q2/QQ); s 凸轮廓线方程: (1)理论廓线方程: s0=sqrt(r02-e2) x=(s0+s)sinδ+ecosδ y=(s0+s)cosδ-esinδ (2)实际廓线方程 先求x,y的一、二阶导数 dx=(ds/dδ-e)*sin(δ)+(s0+s)*cos(δ);
航空航天概论作业
《航空航天概论》作业 第一章:航空航天发展史 1、航天飞机是属于航空器还是航天器? 2、美国航空航天总署(NASA)用中国人名命名的月环山叫_________。 3、中国古代的孔明灯是________航空器的鼻祖。 4、第一个坐气球离开地面升入空中的人是哪个国家的? 5、巨型飞艇一次灾难性事故,它名叫_______。 6、重于空气的飞行器成功升空,得益于蒸汽机的出现。对吗? 7、第一次成功飞越英吉利海峡的人是________。 8、中国航空史上第一人叫_______。 9、二战后期,螺旋桨飞机最快速度达到了_______千米/小时。 10、涡轮喷气发动机是那个国家的工程师发明的? 11、第一种实用的喷气式战斗机是______。 12、第一次突破音障的人名叫________,他驾驶的飞机叫_______. 13、遇到“热障”的飞机叫________ 14、第三代战斗机的主要代表是_________ 15、隐形飞机的主要代表是________ 16、第四代战斗机的“4S”特性是指_______、_______、_______、_______。 17、柏林大空运的有名的运输机是_______。 18、驼峰航线要翻越的山脉是________。 19、第一种涡轮喷气发动机的客机是________。 20、“协和号”客机能够以几倍音速飞行? 21、目前世界上最大的客机是_______。 22、“中国空军美国航空志愿队”又名________。 23、新中国第一架飞机诞生在哪个城市? 24、中国第一种超音速战斗机是______。 25、洪都生产的“强五”飞机的总设计师是_______。 26、我国最强悍的武装直升机是______, 在哪个城市生产的? 27、历史上第一种弹道导弹是德国的______。 28、第一个宇航员是____年升空的,名叫_______。 29、人类第一次登上月球的年份是_____。宇航员是_______。 30、中国第一颗人造地球卫星是_______年升空的。 31、中国的“嫦娥之父”探月首席科学家是________。 32、中国第一位宇航员是_______。 33、中的月球车叫______。 34、美国航空航天总署的英文缩写是______。 35、第一架升空的航天飞机的名叫_______。 第二章飞行原理 36、在对流层层里,平均每升高100米,气温下降______度。 37、平流层也称为同温层,平均温度恒定在零下______度。 38、海平面的音速是_______米/秒。
哈工大机械原理大作业凸轮机构第四题
Harbin Institute of Technology 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 姓名:李清蔚 学号:1140810304 班级:1408103 指导教师:林琳
一.设计题目 设计直动从动件盘形凸轮机构,其原始参数见表 1 表一:凸轮机构原始参数 升程(mm ) 升程 运动 角(o) 升程 运动 规律 升程 许用 压力 角(o) 回程 运动 角(o) 回程 运动 规律 回程 许用 压力 角(o) 远休 止角 (o) 近休 止角 (o) 40 90 等加 等减 速30 50 4-5-6- 7多 项式 60 100 120
二.凸轮推杆运动规律 (1)推程运动规律(等加速等减速运动) 推程F0=90° ①位移方程如下: ②速度方程如下: ③加速度方程如下: (2)回程运动规律(4-5-6-7多项式) 回程,F0=90°,F s=100°,F0’=50°其中回程过程的位移方程,速度方程,加速度方程如下:
三.运动线图及凸轮线图 本题目采用Matlab编程,写出凸轮每一段的运动方程,运用Matlab模拟将凸轮的运动曲线以及凸轮形状表现出来。代码见报告的结尾。 1、程序流程框图 开始 输入凸轮推程回 程的运动方程 输入凸轮基圆偏 距等基本参数 输出ds,dv,da图像 输出压力角、曲率半径图像 输出凸轮的构件形状 结束
2、运动规律ds图像如下: 速度规律dv图像如下: 加速度da规律如下图:
3.凸轮的基圆半径和偏距 以ds/dfψ-s图为基础,可分别作出三条限制线(推程许用压力角的切界限D t d t,回程许用压力角的限制线D t'd t',起始点压力角许用线B0d''),以这三条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件。 得图如下:得最小基圆对应的坐标位置O点坐标大约为(13,-50)经计算取偏距e=13mm,r0=51.67mm.
飞行器自动控制导论_第二章飞行力学基础
第二章飞行力学基础 2.1 飞行器空间运动的表示、飞行器操纵机构、稳定性和操纵性的概念2.1.1常用坐标系 1)地面坐标系(地轴系)(Earth-surface reference frame)Sg-o g x g y g z g 原点o g 取自地面上某一点(例如飞机起飞点)。o g x g 轴处于地平面内并指向 某方向(如指向飞行航线);o g y g 轴也在地平面内并指向右方;o g z g 轴垂直地面 指向地心。坐标按右手定则规定,拇指代表o g x g 轴,食指代表o g y g 轴,中指代表 o g z g 轴,如图2-1所示。 2)机体坐标系(体轴系)(Aircraft-body coordinate frame)Sb-oxyz 原点o取在飞机质心处,坐标与飞机固连。Ox与飞机机身的设计轴线平行,且处于飞机对称平面内;oy轴垂直于飞机对称平面指向右方;oz轴在飞机对称平面内;且垂直于ox轴指向下方(参看图2.1-1)。发动机推力一般按机体坐标系给出。 3)速度坐标系(Wind coordinate frame)Sa-ox a y a z a 速度坐标系也称气流坐标系。原点取在飞机质心处,ox a 轴与飞行速度V的 方向一致。一般情况下,V不一定在飞机对称平面内。oz a 轴在飞机对称面内垂 x 图2.1-1 机体坐标系与地面坐标系
直于ox a 轴指向机腹。oy a 轴垂直于x a oz a 轴平面指向右方,如图2.1-2所示。作用在飞机上的气动力一般按速度坐标系给出。 4)航迹坐标系(Path coordinate frame)Sk-ox k y k z k 原点取在飞机质心处,ox k 轴与飞机速度V 的方向一致。oz k 轴在包含ox k 轴的铅垂面内,向下为正;oy k 轴垂直于x k oz k 轴平面指向右方。研究飞行器的飞行轨迹时,采用航迹坐标系可使运动方程形式较简单。 2.1.2 飞机的运动参数 1)飞机的姿态角 1.俯仰角θ(Pitch angle) 机体轴ox 与地平面间的夹角。以抬头为正。 2.偏航角ψ(Yaw angle) 机体轴ox 在地平面上的投影与地轴o g x g 间的夹角。以机头右偏航为正。 3.滚转角φ(Roll angle) 又称倾斜角,指机体轴oz 与通过ox 轴的铅垂面间的夹角。飞机向右倾斜时 图2.1-2 速度坐标系与地面坐标系
北航《航空航天概论》在线作业一、二、三
北航《航空航天概论》在线作业一 试卷总分:100 测试时间:-- 单选题(共 5 道试题,共 20 分。) V 1. 中国的第一位航天员是()。 B. 杨利伟 满分:4 分 2. 20世纪60年代,苏联航天员加加林乘坐()飞船进入太空,人类实现了遨游太空的 伟大理想。 A. 东方1号 满分:4 分 3. 中国的运载火箭都是以()命名。 A. 长征 满分:4 分 4. 固定翼航空器包括飞机和()。 A. 滑翔机 满分:4 分 5. 美国的()兄弟发明了飞机。 B. 莱特 满分:4 、多选题(共 5 道试题,共 20 分。) V 1. 神舟6号飞船搭载的航天员是()。 C. 费俊龙 D. 聂海胜 满分:4 分 2. 人造地球卫星按照用途可以分为()。 A. 科学卫星 B. 应用卫星 C. 技术试验卫星 满分:4 分 3. 飞机的隐身方式主要有()。
A. 雷达隐身 B. 红外隐身 满分:4 分 4. 民用航空市场现在基本处于垄断市场的两家飞机公司是()。 A. 空客 B. 波音 满分:4 分 5. 根据大气中温度随高度的变化,可将大气层划分为()。 A. 对流层 B. 平流层 C. 中间层 D. 热层和散逸层 满分:4 、判断题(共 15 道试题,共 60 分。) V 1. 中国是第一个具有载人航天能力的国家。 A. 错误 满分:4 分 2. 伯努利原理就是能量守恒原理在流体流动中的应用。 B. 正确 满分:4 分 3. 马赫数可以用来衡量空气被压缩的程度。 B. 正确 满分:4 分 4. 卫星导航系统是21世纪的新技术。 A. 错误 满分:4 分 5. 惯性导航系统是通过测量飞行器的加速度进而推算出飞行器的位置和速度的一种导航 技术。 B. 正确
北航飞行力学大作业.(可编辑修改word版)
飞行力学大作业
= 0 CE E E E CB BE CE BE E E E BE E BE E E B B B B B B B B B Z ? 1 理论推导方程 在平面地球假设下,推导飞机质心在体轴系下的动力学方。 质心惯性加速度的基本方程是式(5.1.7),其中动点就是在转动参考系 F E 中的 O y 。这样 r ' 质心相对 于地球的速度,已用V E 来表示。这里假设地轴固定于惯性空间,且 = 0 。因此, F 的原点的加 速度a 0 就是与地球转动有关的向心加速度。数值比较表明,这一加速度和 g 相比通常可以略去。而 对于式(5.1.7)中的向心加速度项 r ' 的情况也是一样的,,也通常省略。在式(5.1.7)中剩下的 两项中 r ' = V E ,而哥氏加速度为2 E V E 。后者取决于飞行器速度的大小和方向,并且在轨道速度 时至多为 10%g 。当然在更高速度时可能更大。所以保留此项。最后质心的加速度可以简化为如下形 式: a = V E + 2 E V E 有坐标转换知: a = L a = L (V E + 2 E V E ) = L V E + 2L E V E = V E + ( B - E ) V E + 2 E V E = V E + ( + E ) V E (1) 体轴系中的力方程为:f=m a CB 而 f= A B +mg+T 设飞机的迎角为 ,侧滑角为 ,则体轴系的气动力表示为: ? A x ? ?-D ? ?cos cos -cos sin -sin ? ?-D ? ? A ? = L A = L ()L (-) ?-C ? = ? sin cos 0 ? ?-C ? ? y ? BW W y Z ? ? ? ? ? ? ?? A z ?? 重力在牵连垂直坐标系下为: ?? -L ?? ? 0 ? ?? sin a cos -sin a s in cos a ?? ?? -L ?? ? ? V ? ? ?? g ?? (3) 设发动机的安装角为,发动机的推力在机体坐标系的表示如下: ?T x ? ? T cos ? ?T ? = ? 0 ? (4) ? ??T y ? ? ? ? ? ?-T sin ? ? 由坐标转换可知 : E g
北航飞行力学实验班飞机典型模态特性仿真实验报告(精)
航空科学与工程学院 《飞行力学实验班》课程实验飞机典型模态特性仿真 实验报告 学生姓名:姜南 学号:11051136 专业方向:飞行器设计与工程 指导教师:王维军 (2014年 6 月29日 一、实验目的 飞机运动模态是比较抽象的概念, 是课程教学中的重点和难点。本实验针对这一问题,采用计算机动态仿真和在人-机飞行仿真实验平台上的驾驶员在环仿真实验,让学生身临其境地体会飞机响应与模态特性的关系,加深对飞机运动模态特性的理解。 二、实验内容 1.纵向摸态特性实验 计算某机在某状态下的短周期运动、长周期运动的模态参数;进行时域的非实时或实时仿真实验,操纵升降舵激发长、短周期运动模态,并由结果曲线分析比较模态参数;放宽飞机静稳定性,观察典型操纵响应曲线,并通过驾驶员在环实时仿真体验飞机的模态特性变化。
2.横航向模态特性实验 计算某机在某状态下的滚转、荷兰滚、螺旋模态参数;进行时域仿真计算,操纵副翼或方向舵,激发滚转、荷兰滚等运动模态,并由结果曲线分析比较模态参数。 三、各典型模态理论计算方法及模态参数结果表 1 纵向模态纵向小扰动运动方程 0000 1 00 0e p e p e p u w e u w q p u w q X X u u X X g Z Z w w Z Z Z q q M M M M M δδδδδ δδδθθ????????-???? ????????? ? ???????????=+??????????????????? ?????????????????? A =[ X
u X ?w Z u Z w 0?g Z q 0M ?u M ?w0 M q 010] =[?0.01999980.0159027?0.0426897?0.04034850?32.2869.6279 0?0.00005547?0.001893500?0.54005010] A 的特征值方程 |λ+0.0199998?0.01590270.0426897 λ+0.0403485032.2 ?869.627900.000055470.001893500λ+0.540050 ?1λ |=0 特征根λ1,2=?0.290657205979137±1.25842158268078i λ3,4=?0.00954194402086311±0.0377636398212079i 半衰期t 1/2由公式t 1/2=? ln2λ 求得,分别为 t 1/2,1=2.38475828674173s t 1/2,3=72.6421344585972s 振荡频率ω分别为 ω1=1.25842158268078rad/s ω3=0.0377636398212079rad/s 周期T 由公式T =
航空航天概论习题册答案
第一部分基础部分 一单项选择 1.C 2.D 3.B 4.B 5.D 6.C 7C 8A 9B 10C 11.B 12.C 13.C 14.B 15.D 16.B 1 7.C 1 8.C 1 9.A 20.B 21.A 22.D 23.B 24.D 25.D 26.D 27.D28.B 29.B 30.B 31.C 32.C 33.B 34.B 35.D 36.B 37.A 38.B 39.B 40.A 41.C 42.B 43.A 44.A 45.D 46.D 47.B 48.C 49.A 50.A 51.B 52.D 53.A 54.B 55.C 56.C 57.D 58.A 59.D 60.B 61.C 62.A 63.C 64.D 65.C 66.C 67.D 68.B 69.D 70.B 71.B 72.C 73.C 74.C 75.A 76.B 77.B 78.C 79.B 80.B 81.D 82.A 83.A 84.A 85.B 86.C 87.B 88.D 89.C 90.D 91.C 92.D 93.B 94.B 95.B 96.C 97.A 98.B 99.B 100.A 101.B 102.B 103.D 104.A 105.D 106.D 107.D 108.B 109.D 110.D 111.B 112.C 113.D 114.B 115.B 116.D 117.D 118.B 119.C 120.C 121.C 122.C 123.A 124.A 125.C 126.D 127.B 128.D 129.C 130.B 131.D 132.C 133.C 134.D 135.B 136.C 137.B 138.B 139.C 140.C 141.D 142.B 143.A 144.B 145.D 146.D 147.A 148.C 149.C 150.B 151.B 152.A 153.A 154.B 155.C 156.D 157.B 158.D 189.A 160.B 161.A 162.B 163.A 164.C 165.A 166.A 167.D 168.B 169.B 170.B
弹道计算大作业doc资料
弹道计算大作业
目录 一、初始条件和要求 (2) 1.1 初始条件 (2) 1.2 仿真要求 (2) 二、模型的建立 (2) 2.1 升力和阻力模型 (2) 2.2 大气和重力加速度模型 (3) 2.3 无控飞行 (3) 2.4 平衡滑翔 (4) 2.5 最大升阻比滑翔飞行弹道 (4) 三、仿真结果 (5) 3.1 无控飞行弹道仿真 (5) 3.2 平衡滑翔弹道仿真 (7) 3.3 最大升阻比滑翔弹道仿真 (8) 附录 (9)
一、初始条件和要求 1.1 初始条件 已知给定的初始条件如下: 表1 初始条件 1.2 仿真要求 请使用Simulink或Buildfly完成以下仿真任务:(1)请完成该导弹的无控飞行弹道仿真; (2)请完成该导弹的平衡滑翔方案飞行弹道仿真;(3)请完成该导弹的最大升阻比滑翔飞行弹道仿真; 二、模型的建立 2.1 升力和阻力模型 已知展弦比为λ的飞行器的升力线斜率为:
y C α= (1) 根据飞行力学相关知识,飞行器的升力系数和阻力系数为: () 20y y x x y C C C C C ααε?=??=+?? (2) 其中,升力线斜率由(1)式可得;ε为效率系数:1 e επλ =。 由升力系数和阻力系数,得到导弹的升力和阻力为: 2212 12 x y X C v S Y C v S ρρ?=??? ?=?? (3) 2.2 大气和重力加速度模型 在计算过程中,大气密度采用如下模型: 4.25588 000.0065=1H T ρρ??- ? ?? (4) 其中,30 1.225/kg m ρ=为海平面的大气密度;0288.15T K =。 重力加速度采用如下模型: 2 0d d R g g R H ?? = ?+?? (5) 其中,09.8g =,6371000d R m =为地球半径;H 为飞行器距离地面的高度。 2.3 无控飞行 假设导弹的运动始终在铅垂平面,根据飞行力学知识,得到导弹无控飞行时的运动学和动力学方程为:
北航飞行器设计与应用力学系.doc
航空科学与工程学院 2016年研究生入学考试复试大纲 一、复试方式:笔试+面试 二、复试组织: 1、笔试:由航空学院统一组织,考试科目及复试大纲另见《航空科学与工程学院2013年考研复试安排》。 2、口试:以学科专业组为单位,由3-5位硕士生导师组成面试小组(组长为教授),每位考生的面试时间为20分钟。 三、复试流程和评分标准: 1)检查并核实考生面试所必备的个人证件和材料;考生可以提供有助于证明自己背景和能力的相关材料,证件和材料完备是面试的必要条件。 2)考生用英语口述个人基本情况、兴趣等,面试小组老师就考生基本情况提问,考生用英文回答问题。 3)考生朗读一段考场指定的专业外语短文,并口头翻译成中文。 4)面试小组老师就基础理论知识提问,学生用中文回答问题。 5)面试小组老师就专业知识提问,学生用中文回答问题。 面试结束后考生退场,在3-5个工作日后见航空学院网站“招生就业”栏目的“研究生招生”,会通知出学院的拟录取名单,在7层的研究生教学橱窗也会公布。 四、考场纪律 考生准时到达指定的复试考场,遵守考场秩序,尊重考试教师。 五、各学科专业组具体复试内容及参考书: 1、飞行力学与飞行安全系2016年硕士研究生入学复试程序 方式: 由3~6位硕士生导师组成面试小组,每位考生的面试时间为20分钟。 范围: 面试范围包括英语口语能力、专业英语阅读理解能力、专业基础理论知识和专业知识。具体环节如下: 1)对考生学习背景、心理、爱好和志愿等基本情况的了解。 2)考察考生的英语阅读和口头表达能力。
3)基础理论和专业知识面试。基础理论包括自动控制原理、理论力学和材料力学。专业知识包括飞行力学、飞行安全、飞行器总体设计、空气动力学等。 参考书: 基础理论可以选用任何一本考生熟悉的《自动控制原理》、《理论力学》、《材料力学》教材。专业课可以参考《飞机飞行动力学》(熊海泉编)或《飞机飞行性能》、《飞机的稳定与控制》等方面的参考书。 面试流程和评分标准: 1)检查并核实考生面试所必备的个人证件和材料;证件和材料完备是面试的必要条件。2)考生用英语口述个人基本情况、兴趣等,面试小组老师就考生基本情况提问,考生回答问题。 3)读一段指定的专业外语,并口头翻译成中文。 4)面试小组老师就基础理论知识提问,学生回答问题。 5)面试小组老师就专业知识提问,学生回答问题。 6)问答结束后,考生退场,面试老师根据考核要求和面试情况,对考生进行评分。 7)所有考生面试结束后,面试老师根据总体情况,对所有考生进行综合评估和比较,给出面试成绩。 2、人机与环境工程/制冷及低温工程2016年硕士研究生入学复试程序 方式: 由3~5位硕士生导师组成面试小组,每位考生的面试时间为20分钟。 范围: 1)英语阅读和口头表达能力。 2)对考生心理、基本情况的了解。 3)基础理论和专业知识面试。基础理论包括:自动控制原理,理论力学,流体力学;专业知识包括工程热力学,传热学,人机工程,低温制冷。考生可以选择其中1门基础理论和1门专业课作为面试内容,或者是综合知识。 参考书: 可以选用任何一本考生熟悉的《自动控制原理》、《理论力学》、《流体力学》教材。专业课可以选用考生熟悉的《工程热力学》,《传热学》,《人机工程》,低温制冷等方面的参考书。 面试流程和评分标准: 1)检查并核实考生面试所必备的个人证件和材料;证件和材料完备是面试的必要条件. 2)考生用英语口述个人基本情况、兴趣等,面试小组老师就考生基本情况提问,考生回答问题。 3)读一段指定的专业外语,并口头翻译成中文。 4)面试小组老师就基础理论知识提问,学生回答问题。 5)面试小组老师就专业知识提问,学生回答问题。 6) 问答结束后,考生退场,面试老师根据考核要求和面试情况,对考生进行评分。
航空航天概论学习心得
航空航天技术概论心得 在过去半年中,接连发生了两起重大航天灾难。尽管人们备感痛惜,但这些挫折并不能阻挡人类进军宇宙的步伐。 既然航天活动风险如此之大,为什么人类依然不放弃进军宇宙的梦想呢?从长期看,地球的资源是有限的,人类总有一天必须走出自己的摇篮;从中短期看,航天活动可带来巨大回报,是一个国家综合国力的体现。进军宇宙是人类现在和未来的一项伟大事业。于是,载人航天成为现代航天科技发展的重中之重…… 中国载人航天技术的发展及其意义和前景 俗话说,天高任鸟飞,海阔凭鱼跃。人类在漫长的社会进步中不断扩展自身的生存空间。现在,人类的活动范围已经历了从陆地到海洋,从海洋到大气层空间,再从大气层空间到太空的逐步发展过程。人类活动范围的每一次扩展都是一次伟大的飞跃。 中国载人航天技术的发展历程 很久以前,人类就有飞出地球、探知太空奥秘和开发宇宙资源的愿望,我国古代的不少神话故事便是突出的反映。最典型的是流传很广的嫦娥奔月,它描写一个叫嫦娥的美女,偷吃了丈夫后羿从西王母那里求得的长生不老的仙药后,身体变轻飘到月亮上去了。 历史上第 一个试验 乘火箭上 天的人是 15世纪中 国官 员万户。 王大民 22 美术学院 航空航天概论 学习心得
1945年,美国学者基姆在他的《火箭与喷气发动机》一书中是这样描写的:万户先做了两个大风筝,并排装在一把椅子的两边。然后,他在椅子下面捆绑了47支当时能买到的最大火箭。准备完毕后,万户坐在椅子当中,然后命其仆人点燃火箭。但是,随着一声巨响,他消失在火焰和烟雾中,人类首次火箭飞行尝试没有成功。 20世纪80年代,改革开放带来了航天技术的春天。1986年,中共中央、国务院批准了《高技术研究发展计划("863"计划)纲要》,把航天技术列为我国高技术研究发展的重点之一。"863"高技术航天领域的专家们对我国航天技术未来的发展进行了深入细致的论证,描绘了我国航天技术发展前景的蓝图,一致认为载人航天是我国继人造卫星工程之后合乎逻辑的下一步发展目标。1992年1月,党中央批准研制载人飞船工程。自此,我国的载人航天工程正式启动。1999年11月20日,我国成功发射了自行研制的第一艘飞船神舟1号,成为世界上第三个发射宇宙飞船的国家。此后,又分别把神舟2、3和4号送上九重天。在1992年开始研制载人飞船之前,我国"863"高技术航天领域的专家们曾为研制哪种运输器这个问题进行了几年的研究,即对从研制飞船起步和越过载人飞船直接发展航天飞机的多种技术方案进 行了充分的论证、比较和分析,甚至还激烈地争论过。 2003年10月15日圆了万户的梦,因为在这一天中国人民期待已久的第一艘载人飞船神舟5号顺利升空并安全返回,实现了中华千年飞天的理想。它也打破了美国和苏联.俄罗斯在这一领域的多年垄断格局,成为世界第3个独立自主研制并发射载人航天器的国家,这对世界载人航天事业的发展和振兴中华会起到巨大的推动作用。 载人航天的重大意义 历史上,远洋航海技术的兴起,导致了世界贸易的发展、世界市场的开辟和近代科学的一系列成就,开始了一个"全球文明"的时代。当代载人航天技术的问世,则使人类走出地球这一摇篮而到达太空,开始了一个"空间文明"的新时代。 载人航天是航天技术向更高阶段的发展。不过,由于载人航天技术与无人航天技术有很大差别,主要反映在安全性、复杂性和成本高三个方面,所以从1961年第一名航天员上天到现在,它还没有表现出特别明显的用途。但从可以预见的未来来看,人类现在面临的资源枯竭、人口急增等急待解决的几大问题,只有通过开放地球、扩大人类生存空间来解决。即使在当代,发展载人航天也可以起到以下作用: 首先,它能体现一个国家综合国力和提升国际威望。因为航天技术的水平与成就是一个国家经济、科学和技术实力的综合反映。载人航天是航
飞行动力学与控制大作业
《飞行力学与控制》 飞行动力学与控制大作业报告 院(系)航空科学与工程学院 专业名称飞行器设计 学号 学生姓名
目录 一.飞机本体动态特性计算分析 (2) 1.1飞机本体模型数据 (2) 1.2模态分析 (2) 1.3传递函数 (3) 1.4升降舵阶跃输入响应 (3) 1.5频率特性分析 (5) 1.6短周期飞行品质分析 (6) 二.改善飞行品质的控制器设计 (7) 2.1SAS控制率设计 (7) 2.1.1控制器参数选择 (8) 2.1.2数值仿真验证 (12) 2.2CAS控制率设计 (13) 三.基于现代控制理论的飞行控制设计方法 (16) 3.1特征结构配置问题描述 (16) 3.1.1特征结构的可配置性 (16) 3.1.2系统模型 (16) 3.2系统的特征结构配置设计 (17) 3.2.1设计过程 (17) 3.2.2具体的设计数据 (17) 3.2.3结果与分析 (18) 四.附录 (20)
一. 飞机本体动态特性计算分析 1.1 飞机本体模型数据 本文选取F16飞机进行动态特性分析及控制器设计,飞机的纵向状态方程形式如下: . x =Ax +Bu y =Cx (1.1) 状态变量为:[]T u q αθ=x 控制变量为:e δ=u 基准状态选择为120,2000V m s H m ==的定直平飞。选取状态向量 ()T u q αθ =x ,控制量为升降舵偏角,则在此基准状态下线化全量方程所得 到的矩阵数据如下: -0.0312 -1.1095 -9.8066 -0.5083-0.0013 -0.6543 0 0.9185 0 0 0 1.00000 -0.3828 0 -0.6901???? ? ?=???? ??Α (1.2) []-0.0167 -0.0014 -0.0956T =B (1.3) []1.000057.295857.295857.2958diag =C (1.4) 1.2 模态分析 矩阵A 的特征值算出为: 1,23,4-0.6778 + 0.5926i -0.0100 + 0.0769i λλ== 对应的特征向量如下: 0.9874 0.9874 -1.0000 -1.0000 0.1137 - 0.0053i 0.1137 + 0.0053i 0.0011 - 0.0000i 0.0011 + 0.0000i 0.0521 - 0.0629i 0.0521 + 0.0629i 0.002=V 1 + 0.0078i 0.0021 - 0.0078i 0.0019 + 0.0735i 0.0019 - 0.0735i -0.0006 + 0.0001i -0.0006 - 0.0001i ?? ?? ? ??????? 由系统特征值可知,系统具有两对共轭复根,也即具有两种运动模态:长周
机械原理大作业3 凸轮结构设计
机械原理大作业(二) 作业名称:机械原理 设计题目:凸轮机构设计 院系:机电工程学院 班级: 设计者: 学号: 指导教师:丁刚陈明 设计时间: 哈尔滨工业大学机械设计
1.设计题目 如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。 表一:凸轮机构原始参数 序号升程 (mm) 升程运动 角(o) 升程运动 规律 升程许用 压力角 (o) 回程运动 角(o) 回程运动 规律 回程许用 压力角 (o) 远休止角 (o) 近休止角 (o) 12 80 150 正弦加速 度30 100 正弦加速 度 60 60 50 2.凸轮推杆运动规律 (1)推杆升程运动方程 S=h[φ/Φ0-sin(2πφ/Φ0)]
V=hω1/Φ0[1-cos(2πφ/Φ0)] a=2πhω12sin(2πφ/Φ0)/Φ02 式中: h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算) (2)推杆回程运动方程 S=h[1-T/Φ1+sin(2πT/Φ1)/2π] V= -hω1/Φ1[1-cos(2πT/Φ1)] a= -2πhω12sin(2πT/Φ1)/Φ12 式中: h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/6 3.运动线图及凸轮线图 运动线图: 用Matlab编程所得源程序如下: t=0:pi/500:2*pi; w1=1;h=150; leng=length(t); for m=1:leng; if t(m)<=5*pi/6 S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi)); v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6); a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6)); % 求退程位移,速度,加速度 elseif t(m)<=7*pi/6 S(m)=h; v(m)=0; a(m)=0; % 求远休止位移,速度,加速度 elseif t(m)<=31*pi/18 T(m)=t(m)-21*pi/18; S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi)); v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9))); a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9)); % 求回程位移,速度,加速度
201309学期航空航天概论作业4
201309学期航空航天概论作业4 单项选择题 第1题嫦娥1号月球探测卫星采用什么平台建造?() A、资源1号平台 B、东方红三号平台 C、CAST968平台 答案:B 第2题嫦娥1号月球探测卫星的科学目标有几个?() A、10个 B、6个 C、4个 答案:C 第3题1986年,斯里兰卡率先购买6架()飞机,其中1架用作总统的座机,从此开始了中国民用飞机的出口销售。 A、运5 B、运7 C、运8 D、运12 答案:D 第4题A340-500/600是1997年年底才发起的项目,这是空客产品开发战略的一个重要组成部分,目的是直接瞄准()座超远程飞机市场。 A、100-200 B、200-300 C、400-500 D、300-400 答案:D 第5题轰炸机按起飞重量可以分为三类,分别是()。 A、小型、大型、特大型 B、轻型、中型、重型 答案:B 第6题()是我国第一个具有自主知识产权的轻型多用途直升机。由直升机设计研究所、昌飞公司等单位1989年开始共同研制,1994年12月22日首飞成功。 A、直5 B、直8 C、直9 D、直11 答案:D
第7题定翼思想是19世纪初英国航空之父()提出来的。 A、凯利 B、汉森 C、菲利普斯 D、斯特林费罗 答案:A 第8题于2004年8月3日升空的“信使号”是什么探测器?() A、幂王星探测器 B、金星探测器 C、水星探测器 答案:C 第9题嫦娥1号奔月大约需要多长时间?() A、2~3天 B、4~5天 C、8~9天 答案:C 第10题“嫦娥工程”分几期实施?() A、3期 B、4期 C、5期 答案:A 第11题建造“国际空间站”大体分()阶段建造。 A、3个 B、4个 C、5个 答案:A 第12题和平号空间站最主要的特点是率先升空的核心舱上有()对接口。 A、8个 B、6个 C、5个 答案:B 第13题神舟号飞船有()舱。 A、1个 B、2个 C、3个 D、4个 答案:C
哈工大机械原理大作业凸轮
机械原理大作业二 课程名称: _______ 设计题目: 凸轮机构设计 院 系: ------------------------- 班 级: _________________________ 设计者: ________________________ 学 号: _________________________ 指导教师: ______________________ 哈尔滨工业大学 Harbin I nstituteof Techndogy
设计题目 如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数, 据此设计该凸轮机构。 凸轮机构原始参数 二.凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图 凸轮推杆升程运动方程:冷3唱—亦(中] 156 12 .. v 」1 - cos()] 兀1 5 374.4 2 12 ? a 1si n( ) 兀 1 5 % t 表示转角, s 表示位移 t=0:0.01:5*pi/6; %升程阶段 s= [(6*t)/(5*pi)- 1/(2*pi)*si n(12*t/5)]*130; hold on plot(t,s);
t= 5*pi/6:0.01:pi; %远休止阶段 s=130; hold on plot(t,s); t=pi:0.01:14*pi/9; %回程阶段 s=65*[1+cos(9*(t-pi)/5)]; hold on plot(t,s); t=14*pi/9:0.01:2*pi; %近休止阶段 s=0; hold on plot(t,s); grid on % t表示转角,令3 1=1 t=0:0.01:5*pi/6; %升程阶段v=156*1*[1-cos(12*t/5)]/pi hold on plot(t,v); t= 5*pi/6:0.01:pi; %远休止阶段
实验二 飞机小扰动飞行仿真演示实验
实验二飞机小扰动飞行仿真演示实验 实验类型:(演示性) 1.实验目的 该实验将飞行力学知识与飞行仿真、模拟相结合,分析、研究飞机横航向小扰动运动特性。通过该实验,可以使学生更好地学习和理解飞行力学稳定性与操作性的有关内容,增强对飞机飞行品质的感性认识。 2.实验仪器与设备 实验在PC个人计算机、WINDOWS 98以上操作系统、Matlab环境中进行。 3.实验原理 飞行器在定直平飞平衡运动状态下,受到小扰动或操纵作用,响应具有典型的模态特性。纵向小扰动运动包括短周期运动模态、长周期运动模态特点。 其中迎角为短周期运动参数,短周期小扰动运动方程为: 速度、航迹倾角为长周期运动参数,长周期小扰动运动方程为: 横航向小扰动运动包括滚转模态、荷兰滚模态、螺旋模态特点,横航向特征方程为:
滚转模态特征为初始阶段快速滚转,荷兰滚模态特征为既左右偏航又来回滚转,螺旋模态不稳定时,表现为扰动后期飞机沿螺旋线缓慢滚转下降。 本实验建立典型飞机的仿真模型,计算飞机在纵向、横航向小扰动作用下的响应特性,演示飞机的模态特性。 4.实验步骤 1)软件启动 在Matlab环境中执行模型程序“lab.mdl”,界面如下。 2)飞机原始数据调用 鼠标双击,读入“../fdc13/lab/aircraft-lab.dat”文件。 3)配平数据调用
鼠标双击,弹出窗口: 选择, 读入“../fdc13/lab/cr45_3000_lab.tri”文件。 4)扰动输入 鼠标双击,将初始迎角改为5度,相当于加入纵向扰动。 鼠标双击,将初始侧滑角改为5度,相当于加入横航向扰动。5)仿真计算 在Matlab环境对“lab.mdl”进行仿真,仿真时间40秒。 6)结果保存 鼠标双击,保存仿真计算结果。 7)结果输出 鼠标双击,查看纵向运动参数变化情况。 鼠标双击,查看横航向运动参数变化情况。
航空航天概论学习心得
航空航天概论学习心得集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
概论心得 在过去半年中,接连发生了两起重大。尽管人们备感痛惜,但这些挫折 并不 能阻挡人类进 军宇宙的步伐。 既然航天活动风险如此之大,为什么人类依然不放弃进军宇宙的梦想呢?从长期看,地球的资源是有限的,人类总有一天必须走出自己的摇篮;从中短期看,航天活动可带来巨大回报,是一个国家的体现。进军宇宙是人类现在和未来的一项伟大事业。于是,成为现代航天科技发展的重中之重…… 技术的发展及其意义和前景 俗话说,,海阔凭鱼跃。人类在漫长的社会进步中不断扩展自身的生存空间。现在,人类的活动范围已经历了从陆地到海洋,从海洋到空间,再从空间到太空的逐步发展过程。人类活动范围的每一次扩展都是一次伟大的飞跃。 技术的发展历程 很久以 前,人类 就有飞出地 王大民 22 美术学院 航空航天概论 学习心得
球、探知太空奥秘和开发宇宙资源的愿望,我国古代的不少便是突出的反映。最典型的是流传很广的,它描写一个叫嫦娥的美女,偷吃了丈夫从那里求得的的仙药后,身体变轻飘到月亮上去了。 历史上第一个试验乘火箭上天的人是中国官员万户。1945年,美国学者在他的《火箭与》一书中是这样描写的:万户先做了两个大风筝,并排装在一把椅子的两边。然后,他在椅子下面捆绑了47支当时能买到的最大火箭。准备完毕后,万户坐在椅子当中,然后命其仆人点燃火箭。但是,随着一声巨响,他消失在火焰和烟雾中,人类首次火箭飞行尝试没有成功。 80年代,带来了的春天。1986年,、国务院批准了《高技术研究发展计划("863"计划)》,把列为我国高技术研究发展的重点之一。"863"高技术航天领域的专家们对我国航天技术未来的发展进行了深入细致的论证,描绘了我国航天技术发展前景的,一致认为是我国继工程之后合乎逻辑的下一步发展目标。1992年1月,批准研制工程。自此,我国的正式启动。111月20日,我国成功发射了自行研制的第一艘飞船神舟1号,成为世界上第三个发射的国家。此后,又分别把神舟2、3和4号送上。在1992年开始研制之前,我国"863"高技术航天领域的专家们曾为研制哪种运输器这个问题进行了几年的研究,即对从研制飞船起步和越过直接发展的多种进行了充分的论证、比较和分析,甚至还激烈地争论过。 2003年10月15了万户的梦,因为在这一天中国人民期待已久的第一艘载人飞船顺利升空并安全返回,实现了中华千年飞天的理想。