基于预测函数控制算法的柔性结构振动抑制研究
结构振动控制中文
《结构振动控制》教学大纲 课程编号:1322009 英文名称:Control of Structural Vibration 课程类别:选修课学时:36 学分:2 适用专业:土木工程 预修课程:结构动力学、控制理论、随机振动 课程内容: 内容:主要介绍结构振动控制机理,各种减振控制装置,控制律设计中的重要问题以及智能控制。 预期目标:使学生掌握结构控制的原理,能针对不同的要求对结构采用不同的控制策略,提高学生解决实际问题的能力。 重点和难点:被动阻尼器的工作原理及实用设计方法;TMD的工作原理和设计方法;各种主动控制算法的计算步骤、优缺点和使用条件;结构振动的模糊控制和神经网络控制;结构振动控制设计中的模型降阶,溢出,传感器与作动器的定位,鲁棒性,时滞效应;结构半主动控制系统的原理和半主动控制算法;结构振动控制的Benchmark问题。 教材: 欧进萍.结构振动控制-主动、半主动和智能控制.科学出版社 参考书目: 1. 瞿伟廉 .高层建筑和高耸结构的风振控制设计.武汉测绘科技大学出版社 2. 顾仲权.振动主动控制.国防工业出版社 3. 吴波.李惠.建筑结构被动控制的理论与应用.哈尔滨工业大学出版社 4. T.T.Soong.Active Structural Control: Theory and Practice. Longman Scientific & Technical. 5. G.W.Housner.Structural Control: past, present and future.et al. ASCE Journal of Engineering Mechanics, 123(9): 897-971, 1997 考核方式与要求: 课程论文。
FXLMS算法用于压电柔性结构多通道振动控制_朱晓锦
FXL M S算法用于压电柔性结构多通道振动控制 朱晓锦, 高志远, 黄全振, 邵 勇 (上海大学机电工程与自动化学院 上海,200072) 摘要 以模拟太空帆板的压电机敏柔性结构为实验模型,针对结构振动响应主动控制技术需求,着重分析了多通道自适应滤波前馈控制方法及其FX LM S算法实现,以及受控通道模型参数辨识策略,并给出了详细的控制器设计结构图。针对实验模型对象设计、结构模态特性分析、压电元件优化配置、实验平台开发构建、相关软硬件测控环境、实验过程描述与结果分析验证,给出了研究思路与方法过程分析;进行了结构振动响应多通道主动控制实验并取得了良好的控制效果。结果表明,该控制器结构设计与自适应算法有效,为航天柔性结构振动响应分布式多通道控制提供了方法探索思路。 关键词 振动主动控制 自适应滤波控制 压电机敏结构 多通道FX LM S算法 实验模型与平台 中图分类号 T B535.1 T P273.2 引 言 伴随航天事业的不断发展,大型柔性结构在航天器上构成越来越多,由此带来的结构振动问题也愈加严重,如航天器太阳能帆板结构,在轨运行期间必须保证很高的运行精度。由于这类结构具有低刚度小阻尼、固有频率较低和低频模态密集的特点,同时太空环境又无外阻,因此极易受到扰动影响而发生振动。常规技术方法难以达到控制要求,由此机敏结构的研究成为解决上述问题的重要方向[1-2]。 C ra w ley[3]最早分析了梁与压电片之间的作用情况,开辟了以分布式压电陶瓷作为驱动器的结构振动主动控制研究方向,此后新的研究成果不断出现[4-7]。就控制方法与控制律设计而言,几乎涉及到现代控制理论的所有分支,诸如极点配置、最优控制、自适应控制、鲁棒控制、模糊控制、学习控制与智能控制等[8],由于自适应控制对系统参数变化具有较好的适应性,从而在研究进程中得到广泛采用[9]。 当前,自适应滤波前馈控制方法在机敏结构振动主动控制研究中获得积极关注[10],尤其用滤波-X 最小均方(filtered-X least m ean square,简称FXLM S)算法进行控制器设计,具有控制修正速率高、对非平稳响应适应能力强,并能够较快跟踪结构参数及外扰响应变化的特性,不足之处在于需要预知与外激扰信号相关的参考信号,同时多通道控制器结构设计也相对复杂。本文在简要描述压电元件工作机理的基础上,基于FXLM S算法过程,着重分析了多通道自适应滤波前馈控制方法,以及受控通道模型参数辨识策略,并给出详细的控制器设计结构图。在此基础上进行实验模型对象设计和实验环境开发,采用在线辨识方法获得实验结构受控通道模型参数,进而实现压电柔性结构振动响应的多通道自适应控制。实验结果表明了控制器结构与自适应算法的有效性和可行性,且具有快速收敛以及较低阶模型就能满足控制性能要求的优势。 1 压电元件本构方程 压电材料力学和电学行为关系,可以采用压电方程进行描述,取应力e和电场强度E为自变量,则压电方程可以表示为 Xλ=c Eλu e u+d jλE j λ,u=1,2,…,6 D i=d iu e u+_e ij E j i,j=1,2,3(1)其中:c Eλu为电场恒定时的弹性柔顺系数;d jλ为压电应变常数;_e ij为应力恒定时的介电常数。 一般在压电机敏结构振动控制中,使用的压电应变常数为d31,即沿压电驱动器极化轴3方向施加电场,通过d31的耦合在垂直于极化方向1轴,即元件长度l的方向上激发横向振动;具体驱动信号来自 第31卷第2期2011年4月 振动、测试与诊断 Jou rna l o f V ib ra tion,M easu re m en t&D iagno sis V o.l31N o.2 A pr.2011 国家自然科学基金重大研究计划资助项目(编号:90405013,90716027);上海人才发展基金资助项目(编号:2009020);上海大学“十一五”“211”建设资助项目;上海市电站自动化技术重点实验室资助项目;上海市教委“机械电子工程”创新团队资助项目 收稿日期:2009-08-22;修改稿收到日期:2009-11-13
MA AB模型预测控制工具箱函数
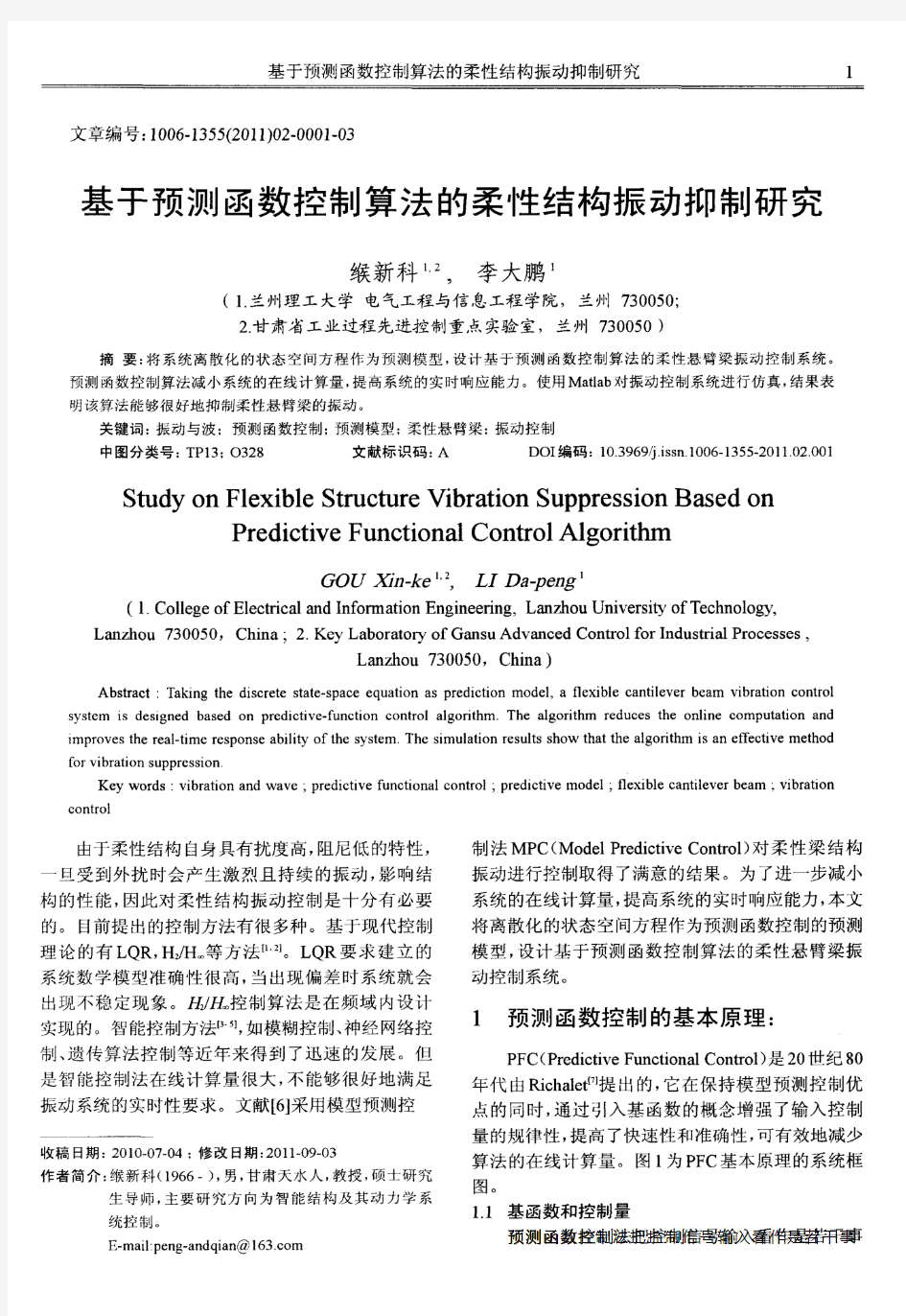
M A T L A B模型预测控制工具箱函数 8.2系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2模型建立与转换函数 8.2.1模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型;
⑤MPC传递函数模型。 在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动 和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod=ss2mod(A,B,C,D) pmod=ss2mod(A,B,C,D,minfo) pmod=ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A,B,C,D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0,u0,y0,f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
结构振动控制的概念及分类
耗能方案 性能来抵御地震作用的,即由结构本身储存和消耗地震能量,以满足结构抗震设防标准,小震不坏,可能无法满足安全性的要求;另一方面,在满足设计要求的情况下,结构构件的尺寸可能需做得很大木工程领域新兴一种新型的抗震方式——结构振动控制,即对结构施加控制机构,由控制机构和结构 半主动控制和混合控制。 是由控制装置随结构一起振动变形而被动产生的。被动控制可分为基础隔震技术、耗能减震技术和吸是由控制装置按某种控制规律,利用外加能源主动施加的。主动控制系统由传感器、运算器和施力作术。主动控制有主动拉索系统(ATS)、主动支撑系统(ABS)、主动可变刚度系统(AVSS)、主动质期开始研究主动控制。目前,主动控制在土木工程中的应用已达30多项,如日本的Takenaka实验控制力虽也由控制装置自身的运动而被动的产生,但在控制过程中控制装置可以利用外加能源主动调置、半主动TMD、半主动力触动器、半主动变刚度装置和半主动变阻尼装置等。 主动控制,或者是同时应用不止一种的被动控制装置,从而充分发挥每一种控制形式和每一种控制装:同时采用AMD和TMD的混合控制系统、主动控制和基础隔震相结合的混合控制系统以及主动控制和
京的清水公司技术研究所。 ,但由于建筑结构体形巨大导致所需的外加能源较大,加之控制装置的控制的算法比较复杂,而且存好,容易实现,目前发展最快,应用最广,尤其是其中的基础隔震技术已相当成熟,并得到了一定程主动控制低廉,而且不需要较大的动力源,因此其具有广阔的应用和发展前景;混合控制综合了某几 和耗能减震技术。 置控制机构来隔离地震能量向上部结构传输,使结构振动减轻,防止地震破坏。目前研究开发的基础和混合隔震等。近年来,越来越多的国家开展了基础隔震技术的研究,因此,隔震技术也得到了飞速:日本94栋,美国21栋,中国46栋,意大利19栋,新西兰16栋,已采用了基础隔震技术。最近有 使结构的振动能量分散,即结构的振动能量在原结构和子结构之间重新分配,从而达到减小主结构振尼器(TLD);(3)质量泵;(4)液压—质量控制系统(HMS);(5)空气阻尼器。其中,应用最多两个重300吨的TMD,质量块在9米长的钢板上滑动,它很好地减小了大楼的风振反应,防止了玻璃幕nade桥的桥塔均安装了TMD,其减震效果均令人十分满意。日本的Yokohama海岸塔是一个高101米析表明,安装了TLD后塔的阻尼比由0.6%增加到4.5%,在强风作用下塔的加速度减小到原来的1/3 TLD以控制其风振反应。
MATLAB模型预测控制工具箱函数
M A T L A B模型预测控制 工具箱函数 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
M A T L A B模型预测控制工具箱函数 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤MPC传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod= ss2mod(A,B,C,D) pmod= ss2mod(A,B,C,D,minfo) pmod= ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
浅谈建筑结构振动控制
浅谈建筑结构振动控制 摘要:文章从不同角度对结构振动控制进行了分类,介绍了其发展与现状,并对近年来控制理论在结构控制方而的新进展给以综述,最后对有待进一步研究的问题进行了探讨,以促进结构振动控制的研究。 关键词:结构振动控制;自主控制;上木工程结构 abstract: this article from a different perspective on the structural vibration control classification, its development and status, and give summarized in the the structure controlling party and the new advances in control theory in recent years, last discussed the issue needs further study .to promote the study of the structural vibration control.key words: structural vibration control; self-control; engineering structures on wood 中图分类号:c935 文献标识码:a 文章编号:2095-2104(2012)结构振动控制是一个应用领域广泛的工程问题。所谓结构振动控制(以下称为结构控制)是指采用某种措施使结构在动力载荷作 用下的响应不超过某一限量,以满足工程要求。 结构控制问题是一种多学科交叉的理论与工程问题,其结构类型繁多、控制目标不同、实现手段多样。目前,国内外控制界对这类问题的研究十分重视,有大量的学术论文发表,其中不少新结果得到了实际工程应用。本文旨在对当前结构控制的一此新进展加以
MATLAB模型预测控制工具箱函数..
MATLAB模型预测控制工具箱函数 8.2 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 8.2.1 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型;
⑤ MPC 传递函数模型。 在上述5种模型格式中,前两种模型格式是MATLAB 通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC 状态空间模型和MPC 传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC 状态空间模型之间的转换 MPC 状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod ()和mod2ss ()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC 状态空间模型函数ss2mod () 该函数的调用格式为 pmod= ss2mod (A,B,C,D) pmod = ss2mod (A,B,C,D,minfo) pmod = ss2mod (A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D 为通用状态空间矩阵; minfo 为构成MPC 状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆ minfo(1)=dt ,系统采样周期,默认值为1; ◆ minfo(2)=n ,系统阶次,默认值为系统矩阵A 的阶次; ◆ minfo(3)=nu ,受控输入的个数,默认值为系统输入的维数; ◆ minfo(4)=nd ,测量扰的数目,默认值为0; ◆ minfo(5)=nw ,未测量扰动的数目,默认值为0; ◆ minfo(6)=nym ,测量输出的数目,默认值系统输出的维数; ◆ minfo(7)=nyu ,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o ,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod 为系统的MPC 状态空间模型格式。 例8-5 将如下以传递函数表示的系统模型转换为MPC 状态空间模型。 1 2213)(232+++++=s s s s s s G 解:MATLAB 命令如下:
神经网络预测控制综述
神经网络预测控制综述 摘要:近年来,神经网络预测控制在工业过程控制中不仅得到广泛的应用,而且其理论研究也取得了很大进展。对当前各种神经刚络预测控制方法的现状及其工业应用进行了较深入地分析,并对其存在的问题和今后可能的发展趋势作了进一步探讨。 关键词:神经网络;预测控制:非线性系统;工业过程控制 Abstract: In recent years, neural network predictive control has not only been widely used in industrial process control, but also has made great progress in theoretical research. The current status of various neural network prediction control methods and their industrial applications are analyzed in depth, and the existing question and possible future development trends are further discussed. Keywords: neural network; predictive control: nonlinear system; industrial process control
20世纪70年代以来,人们从工业过程的特点出发,寻找对模型精度要去不高而同样能实现高质量控制性能的方法,预测控制就是在这种背景下发展起的[1]。预测控制技术最初山Richalet和Cutler提出[2],具有多步预测、滚动优化、反馈校正等机理,因此能够克服过程模型的不确定性,体现出优良的控制性能,在工业过程控制中取得了成功的应用。如Shell公司、Honeywell公司、Centum 公司,都在它们的分布式控制系统DCS上装备了商业化的预测控制软件包.并广泛地将其应用于石油、化工、冶金等工业过程中[3]。但是,预测函数控制是以被控对象的基函数的输出响应可以叠加为前提的,因而只适用于线性动态系统控制。对于实际中大量的复杂的非线性工业过程。不能取得理想的控制效果。而神经网络具有分布存储、并行处理、联想记忆、自组织和自学习等功能,以神经元组成的神经网络可以逼近任意的:线性系统。使控制系统具有智能化、鲁棒性和适应性,能处理高维数、非线性、干扰强、难建模的复杂工业过程。因此,将神经网络应用于预测控制,既是实际应用的需要,同时也为预测控制理论的发展开辟了广阔的前景。本文对基于神经网络的预测控制的研究现状进行总结,并展望未来的发展趋势。 l神经网络预测控制的基本算法的发展[4] 实际中的控制对象都带有一定的菲线性,大多数具有弱非线性的对象可用线性化模型近似,并应用已有的线性控制理论的研究成果来获得较好的控制效果。而对具有强非线性的系统的控制则一直是控制界研究的热点和难点。 就预测控制的基本原理而言,只要从被控对象能够抽取出满足要求的预测模型,它便可以应用于任何类型的系统,包括线性和非线性系统。 由于神经网络理论在求解非线性方面的巨大优势,很快被应用于非线性预测控制中。其主要设计思想是:利用一个或多个神经刚络,对非线性系统的过程信息进行前向多步预测,然后通过优化一个含有这些预测信息的多步优化目标函数,获得非线性预测控制律。在实际应用与理论研究中形成了许多不同的算法。如神经网络的内模控制、神经网络的增量型模型算法控制等,近来一些学者对有约束神经网络的预测控制也作了相应的研究。文献[5]设计了多层前馈神经网络,使控制律离线求解。文献[6]采用两个网络进行预测,但结构复杂,距离实际应用还有一定的距离,文献[7]利用递阶遗传算法,经训练得出离线神经网络模型.经多步预测得出对象的预测模型,给出了具有时延的非线性系统的优化预测控制。将神经网络用于GPC的研究成果有利用Tank.Hopfield网络处理GPC矩阵求逆的算法,基于神经网络误差修正的GPC算法、利用小脑模型进行提前计算的GPC 算法、基于GPC的对角递归神经网络控制方法以及用神经网络处理约束情形的预
模型预测控制快速求解算法
模型预测控制快速求解算法 模型预测控制(Model Predictive Control,MPC)是一种基于在线计算的控制优化算法,能够统一处理带约束的多参数优化控制问题。当被控对象结构和环境相对复杂时,模型预测控制需选择较大的预测时域和控制时域,因此大大增加了在线求解的计算时间,同时降低了控制效果。从现有的算法来看,模型预测控制通常只适用于采样时间较大、动态过程变化较慢的系统中。因此,研究快速模型预测控制算法具有一定的理论意义和应用价值。 虽然MPC方法为适应当今复杂的工业环境已经发展出各种智能预测控制方法,在工业领域中也得到了一定应用,但是算法的理论分析和实际应用之间仍然存在着一定差距,尤其在多输入多输出系统、非线性特性及参数时变的系统和结果不确定的系统中。预测控制方法发展至今,仍然存在一些问题,具体如下: ①模型难以建立。模型是预测控制方法的基础,因此建立的模型越精确,预测控制效果越好。尽管模型辨识技术已经在预测控制方法的建模过程中得以应用,但是仍无法建立非常精确的系统模型。 ②在线计算过程不够优化。预测控制方法的一大特征是在线优化,即根据系统当前状态、性能指标和约束条件进行在线计算得到当前状态的控制律。在在线优化过程中,当前的优化算法主要有线性规划、二次规划和非线性规划等。在线性系统中,预测控制的在线计算过程大多数采用二次规划方法进行求解,但若被控对象的输入输出个数较多或预测时域较大时,该优化方法的在线计算效率也会无法满足系统快速性需求。而在非线性系统中,在线优化过程通常采用序列二次优化算法,但该方法的在线计算成本相对较高且不能完全保证系统稳定,因此也需要不断改进。 ③误差问题。由于系统建模往往不够精确,且被控系统中往往存在各种干扰,预测控制方法的预测值和实际值之间一定会产生误差。虽然建模误差可以通过补偿进行校正,干扰误差可以通过反馈进行校正,但是当系统更复杂时,上述两种校正结合起来也无法将误差控制在一定范围内。 模型预测控制区别于其它算法的最大特征是处理多变量多约束线性系统的能力,但随着被控对象的输入输出个数的增多,预测控制方法为保证控制输出的精确性,往往会选取较大的预测步长和控制步长,但这样会大大增加在线优化过程的计算量,从而需要更多的计算时间。因此,预测控制方法只能适用于采样周
浅谈建筑结构振动控制技术
龙源期刊网 https://www.360docs.net/doc/c813393288.html, 浅谈建筑结构振动控制技术 作者:翟永兵 来源:《智富时代》2018年第03期 【摘要】近年来,随着我国经济的飞速发展,人民生活水平的日益提高,同时也带动了 我国建筑工程的快速发展,而在建筑工程结构振动控制技术中,传统的抗震结构体系是通过加强结构本身的性能从而达到“抗御”地震的目的。土木工程结构振动控制有利于降低结构在地震、流水、海浪、风、车辆等动力作用下结构所造成的损伤,能够有效地将结构抗震防灾能力相对增强。结构控制引起了世界各国地震工程界的广泛重视,是一种新型的结构抗震技术。但这种方法的作用与安全性相对是较低的,所以在这种不确定性的地震作用下,结构的安全性能并不能得到充分的保障,最后产生倒塌或遭到严重破坏,造成人员伤亡与巨大的经济损失。本文就建筑工程结构振动控制技术进行分析,并对其的发展进行讨论。 【关键词】建筑工程;震动控制;发展 一、结构控制的特点、发展与现状 (一)按控制对能量需求来划分 从控制对外部能量需求的角度,结构控制可分为:被动结构控制、主动结构控制、混合结构控制、半主动结构控制。除被动控制外,其他三种控制方式中的控制力全部或部分地根据反馈信号按照某种事先设计的控制律实时产生。主动结构控制效果较好,对环境有较强的适应力,但完全依赖外部能源,闭环稳定性比其他方式差。在被动控制中,控制力不是由反馈产生的。其主要优点是;成本低、不消耗外部能量、不会影响结构的稳定性;缺点是:对环境变化的适应力与控制效果不如其他方案。混合控制是指用主动控制来补充和改善被动控制性能的方案。由于混合了被动控制,因此减小了全主动控制方案中对能量的要求。半主动控制中通常包含某种对能量需求很低的可控设备,如可变节流孔阻尼器等作用时所需的外部能量通常比主动控制小得多。因此初步研究表明混合控制与半主动控制的性能大大优于被动控制,甚至可达到或超过主动控制的性能,并在稳定性与适用性方面要优于后者,因此成为当前研究的一个热点。 (二)按结构特性划分 从被控结构的特性划分,结构控制可分为柔性结构控制与刚性结构控制。其中柔性结构包括大型柔性空间结构、大跨度桥梁等;刚性结构则包括武器系统中稳定平台、车辆悬挂系统、多刚体机器人等。对于两类结构控制所用的主动控制设备也不相同,如在柔性结构控制中传感器与执行器常用的智能材料是分布智能材料,如压电材料;而刚性结构控制中传感器与执行器常用的智能材料是电智能材料,如磁致伸缩材料。
结构振动控制
武汉理工大学 结构振动控制 Vibration Control of Structure 课程:工程结构振动控制理论 授课老师:周强 学生姓名:吴平 学号:104972081971 班级:土木研0803
结构振动控制 吴平 (土木研0803班) 摘要:本文主要介绍了结构振动控制的概念、基本原理以及分类。重点阐述了 被动控制、主动控制、半主动控制和混合控制的不同特点。 关键字:被动控制,主动控制,半主动控制,混合控制 Vibration Control of Structure Wuping (Department of Civil Engineering,Wuhan University of Technology) Abstract:This paper introduces the conceptand basic principles and classification of structural vibration control. Highlighted the differences among passive control, active control, semi-active control and hybrid control. Key words :passive control, active control, semi-active control,hybrid control. 引言 随着社会的发展,工程结构形式日益多样化以及轻质高强材料的应用,结构 的刚度和阻尼比变小。在强风或强烈地震荷载作用下,结构物的动力反应强烈,很难满足结构舒适性和安全性的要求。按照传统的抗风抗震设计方法,即通过提 高结构本身的强度和刚度来抵御风荷载或地震作用,是一种“硬碰硬”式的抗震 方法,它很不经济,也不一定安全。而且失去了轻质高强材料自身的优势,还不 能满足口益现代化的机器设备不能因为剧烈振动而中断工作或者破坏的要求。 传统的抗震设计方法已不能满足需要,从而使结构振动控制理论在工程结构中开 始得到应用。结构振动控制可以有效地减轻结构在风和地震等动力作用下的反应 和损伤,提高结构的抗震能力和抗灾性能。结构控制通过在结构上设置控制机构,由控制机构与结构共同控制抵御地震动等动力荷载,使结构的动力反应减小。结 构控制是人的主观能动性与自然的高度结合,是结构对策新的里程碑。
土木工程结构振动控制技术及其应用研究.
万方数据
万方数据 万方数据 《6? 善s. 曼s. 蓑s. 辎4. 图6模拟结构阻尼比随TLMD频率比变化曲线 模拟结构阻尼比达到极值。频率比在0.96~0.98区间,即频率比在最优值附近改变±1%时,模拟结构阻尼比变化较为平缓且均在6%以上。
实桥通常采用多重TLMD(MTLMD进行减振,为此在室内进行了MTLMD减振性能试验。分别将1~4台频率和阻尼均调为优化值的减振器固定到上述模拟结构上进行试验,得到模拟结构阻尼比随TLMD总质量比变化的曲线如图7所示,按TMD 理论计算的相应曲线亦绘于图7。从图7可知,模拟结构的阻尼比随TLMD总质量比增加而增大,4台TLMD(质量比1.91%时,模拟结构阻尼比达到7.13%,抑振效果非常好。1~4台TLMD 的试验值与同质量比下的TMD理论计算值比较,模拟结构阻尼比分别提高27%、23%、35%和46%,说明新型TLMD双调谐减振器由于同时具有TLD 和TMD的抑振效能,抑振性能在TMD基础上有大幅提升。 图7MTLMD抑振性能的试验值与TMD理论僵对比3.1.3实桥试验 选取九江长江大桥三大拱中2根典型吊杆(C32A32和C10A10,对该新型减振器进行了减振性能实桥试验。在每根吊杆上安装4台活动质量均为10kg的减振器,如图8所示。首先撤下吊杆原有TMD减振器,分别进行激振并得到吊杆自身的自振特性;然后安装试验用新型减振器TLMD对吊杆激振,进行新型TLMD减振性能试验;最后对撤下的既有TMD减振器进行检修,使之恢复最佳状态,重新安装到吊杆上进行综合减振性能试验。试验结果如图9所示。 由图9可知,吊杆C32A32和C10A10在TLMD质量比分别为1.57%与1.56%的情形下, 图8新型TLMD实桥安装 图9实桥试验结果 目标振型阻尼比达到了5.09%和3.58%,阻尼分别提高了50.9倍和35.8倍。对非目标振型,结构阻尼比也有所提高。对比原TMD在质量比为1.9%时,目标振型阻尼比为3%左右,TLMD具有更好的减振效果。TLMD与TMD减振器共同工作时,目标振型的结构阻尼比进一步增加到5.47%和4.98%,非目标振型的结构阻尼比有更明显的提高。
预测PID控制算法的基本原理及研究现状
预测PID控制算法的基本原理及研究现状 邵惠鹤任正云 邵惠鹤先生,上海交通大学自动化系教授;任正云先生,博士。 关键词:模型预测控制预测PID控制算法 在现今全球竞争日益激烈的市场环境下,通过先进控制获取经济效益来提高企业竞争力,已成为一种趋势。据有关文献报道(薛美盛等, 2002),各种不同石油化工装置实施先进控制后,其每年净增效益如表1所示。虽然各公司所报出的年效益有所不同,但其数据出入不大,而实施先进控制所需成本只占其产生效益的很小一部分比例。 国外发达国家经验表明(孙德敏等, 2003):采用先进控制理论和过程优化将增加30%的投资,但可提高产品层次和质量,降低能源和原材料消耗,从而增加85%的效益,如图1所示。投资70%的资金购置DCS,换来的是15%的经济效益;再增加30%的投资,可以换来85%的经济效益。其中增加的8%用于传统的先进控制(TAC),得到的经济效益是8%;增加的13%用于预测控制(DMC),得到的经济效益为37%;增加的9%用于在线闭环优化(CLRTO),换来的经济效益是40%!因此,实施先进控制与优化是不用投资的技术改造。 然而,控制理论本身也面临着一些问题和困难,需要不断改进和提高。尽管大量新的控制算法不断涌现,但常规的PID及改进的PID控制算法仍广泛应用于工业控制领域。一些先进控制算法专用性强、适应性差、鲁棒性能差、算法复杂、实施和维护成本高,这些都限制了它们的推广和发展。据日本控制技术委员会(SICE)对110家企业和150位控制工程师调查显示(Huruo, 1998),近20年来,工业界迫切需要解决的控制难题分别是:大滞后、强耦合、时变、严重干扰以及非线性对象的控制,这些问题始终都没有得到切实有效的解决。部分先进控制理论理论性太强,实际应用需做大量的改进和简化,使先进控制具备鲁棒性是当前重要的发展方向。 在先进控制技术中,最有应用前途的是模型预测控制,该技术经历了4代发展,已非常完善和成熟了。第一代模型预测技术以DMC(Cutler, 1979)和IDCOM(Richalet, 1978)两种商业产品为标志;QDMC(Garcia, 1986)标志着第二代
结构振动控制的概念与分类
结构振动控制的概念及分类-----------------------作者:
-----------------------日期:
耗能方案 耗能减震技术的研究、应用与发展 一、结构振动控制的概念及分类 传统的抗震设计是通过增强结构本身的抗震性能来抵御地震作用的,即由结构本身储存和消耗地震能量,以满足结构抗震设防标准,小震不坏,中震可修,大震不倒。而这种抗震方式缺乏自我调节能力,在不确定的地震作用下,很可能无法满足安全性的要求;另一方面,在满足设计要求的情况下,结构构件的尺寸可能需做得很大,这样既给建筑布置带来一定的困难,在经济上又要增加相当多的投资。近年来,在土木工程领域新兴一种新型的抗震方式——结构振动控制,即对结构施加控制机构,由控制机构和结构共同承受地震作用,以调谐和减轻结构的地震反应。 结构振动控制可分为被动控制、主动控制、半主动控制和混合控制。 被动控制——无外加能源的控制,其控制力是由控制装置随结构一起振动变形而被动产生的。被动控制可分为基础隔震技术、耗能减震技术和吸能减震技术。 主动控制——有外加能源的控制,其控制力是由控制装置按某种控制规律,利用外加能源主动施加的。主动控制系统由传感器、运算器和施力作动器三部分组成。主动控制是将现代控制理论和自动控制技术应用于结构抗震的高新技术。主动控制有主动拉索系统(ATS)、主动支撑系统(ABS)、主动可变刚度系统(AVSS)、主动质量阻尼系统(AMD)等。主动控制研究较多的国家是美国、日本和中国,我国自80年代末期开始研究主动控制。目前,主动控制在土木工程中的应用已达30多项,如日本的Takenaka实验大楼和Kankyu Chayamechi大楼。 半主动控制——有少量外加能源的控制,其控制力虽也由控制装置自身的运动而被动的产生,但在控制过程中控制装置可以利用外加能源主动调整自身的参数,从而起到调节控制力的作用。现有的半主动控制技术包括:半主动隔震装置、半主动T MD、半主动力触动器、半主动变刚度装置和半主动变阻尼装置等。 混合控制——在结构上同时应用被动控制和主动控制,或者是同时应用不止一种的被动控制装置,从而充分发挥每一种控制形式和每一种控制装置的长处,克服它们的弱点,以获得更好的控制效果。目前提出的混合控制方法主要有:同时采用AMD 和TMD的混合控制系统、主动控制和基础隔震相结合的混合控制系统以及主动控制和耗能减震相结合的混合控制系统。世界上第一个安装混合控制系统的建筑是位
结构振动控制技术的发展及存在的问题
结构振动控制技术的发展及存在的问题 郑瑞生 (福建省建筑科学研究院) 摘要:介绍了结构振动控制的概念和目前已有的结构振动控制的方法,即被动控制、主动控制等。介绍了各种控制方法的相关理论。概述了目前国内外结构振动控制的工程应用及发展现状,提出了结构振动控制今后有待进一步研究的课题,指出了目前我国结构振动控制应用中所面临的若干问题。 关键词:结构振动控制;被动控制;主动控制 中图分类号: 文献标识码: 文章编号: Development and some problems of structural vibration control ZHENG Ruisheng Abstract: The concept and existent type of structural vibration control are introduced, including passive control, active control, and et c. The correspondent control theories of these methods are then introduced. The practical application and the state-of-the-art of structural vibration control at home and abroad are summarized. The further research lessons of structural vibration control are presented from now on, and some problems in application of structural vibration control of our country now are pointed out. Key words: structural vibration control; passive control; active control 传统的抗震设计方法以概率理论为基础,提出三水准的设防要求,即小震不坏,中震可修,大震不倒,并通过两阶段设计来实现:第一阶段设计采用第一水准烈度的地震动参数,结构处于弹性状态,能够满足承载力和弹性变形的要求;第二阶段设计采用第三水准烈度的地震动参数,结构处于弹塑性状态,要求具有足够的弹塑性变形能力,但又不能超过变形限值,使建筑物“裂而不倒”。然而,结构物要终止在强震或大风作用下的震动反应(速度、加速度、位移),必然要进行能量转换或换散。传统抗震结构体系实际上是依靠结构及承重构件的损坏消耗大部分输入能量,往往导致结构构件严重破坏甚至倒塌,这在一定程度上是不合理的也是不安全的。为了克服传统抗震方法的缺陷,结构震动控制技术(简称结构控制)逐渐发展起来,并被认为是减轻结构地震和风振反应的有效手段。结构消能减震(又称消能减振)技术就是一种结构控制技术,《抗震规范》首次以国家标准的形式对房屋消能减震设计这种抗震设防新技术的设计要点做出了规定,标志着消能减震技术在我国已经由科学研究走向了推广应用阶段。 1 结构振动控制的概念 1972年美籍华裔学者姚治平(J.T.P.Yao )教授撰文第一次明确提出了土木工程结构控制的概念 ,近30年来,国内外学者在结构控制的理论、方法、试验和工程应用等方面取得了大量的研究成果。结构控制的概念可以简单表述为:通过对结构附加控制机构或装置,由控制机构或装置与结构共同承受震动作用,以协调和减轻结构的震动反应,使它在外界干扰作用下的各项反应值被控制在允许范围内。基于此定义,结构控制的减震机理,可简单地用一个结构动力方程予以说明: g []{()}[]{()}[]{()}()[]{}()M x t C x t K x t F t M I x t ++=- (1) 式中[]M 、[C ] 、[K ]—分别为结构的质量、阻尼和刚度矩阵; {I }—单位列向量; F (t)—外部作用(包括控制机构或装置施加的控制力、风或可能施加的其他外力)列向量; {}g x {(t)}x 、{(t)}x 、{()}x t —分别为结构在外部作用(或荷载)下的加速度、速度和位移反应列向量;
柔性机械臂振动控制
柔性机械臂振动控制 1引言 随着人类科技水平的不断进步,机器人的应用越来越广泛。新一代机器人正向着高速化、精密化和轻型化的方向飞速发展, 传统的将机器人视为刚体系统的分析与设计方法已显得愈加不适用。近二十年,计及构件及关节弹性影响的柔性机器人动力学分析与振动控制问题已受到国内外学者的广泛关注[1]。在工业、医疗、军事等领域内,它能够代替人类完成大量重复、机械的工作。近些年,人类对外太空的探索不断深入,空间机器人因为具有较强的恶劣环境的适应能力,且完成任务的精确程度较高,正受到越来越多科研机构的关注和重视。 机械臂作为机器人的重要组成部分,其未来的发展趋势是高速、高精度和轻型化。操作灵活、性能稳定的柔性机械臂,无论在航天领域还是在工业领域都具有很高的应用价值。柔性机械臂系统的动力学特点是大范围刚体运动的同时,伴随着柔性臂杆的小幅弹性振动。柔性臂杆的弹性振动将极大地影响机械臂末端的定位精度,甚至影响机器人系统的稳定性。 2研究背景及意义 随着工业自动化程度的提高,工业机器人的应用范围也从传统的汽车制造领域推广到了机械加工业、电子电气业、食品工业、物流、医疗等领域,机器人的科,类包括了焊接机器人、喷涂机器人、洁净机器人和医疗机器人等。 瑞典ABB公司制造的“IRB5400-12”喷涂机器人(图1所示),具有6个自由度,工作时关节轴的最大转速137o/S,末端定位精度0.15mm,其性能特点是喷涂精确、工作域大、负载能力强且运行可靠性高。日本FANUC公司制造的“M-10iA”工业机器人(图2所示),工作半径1420mm,重复精度士0.8mm,主要用途包括搬运、弧焊、机床上下料等。