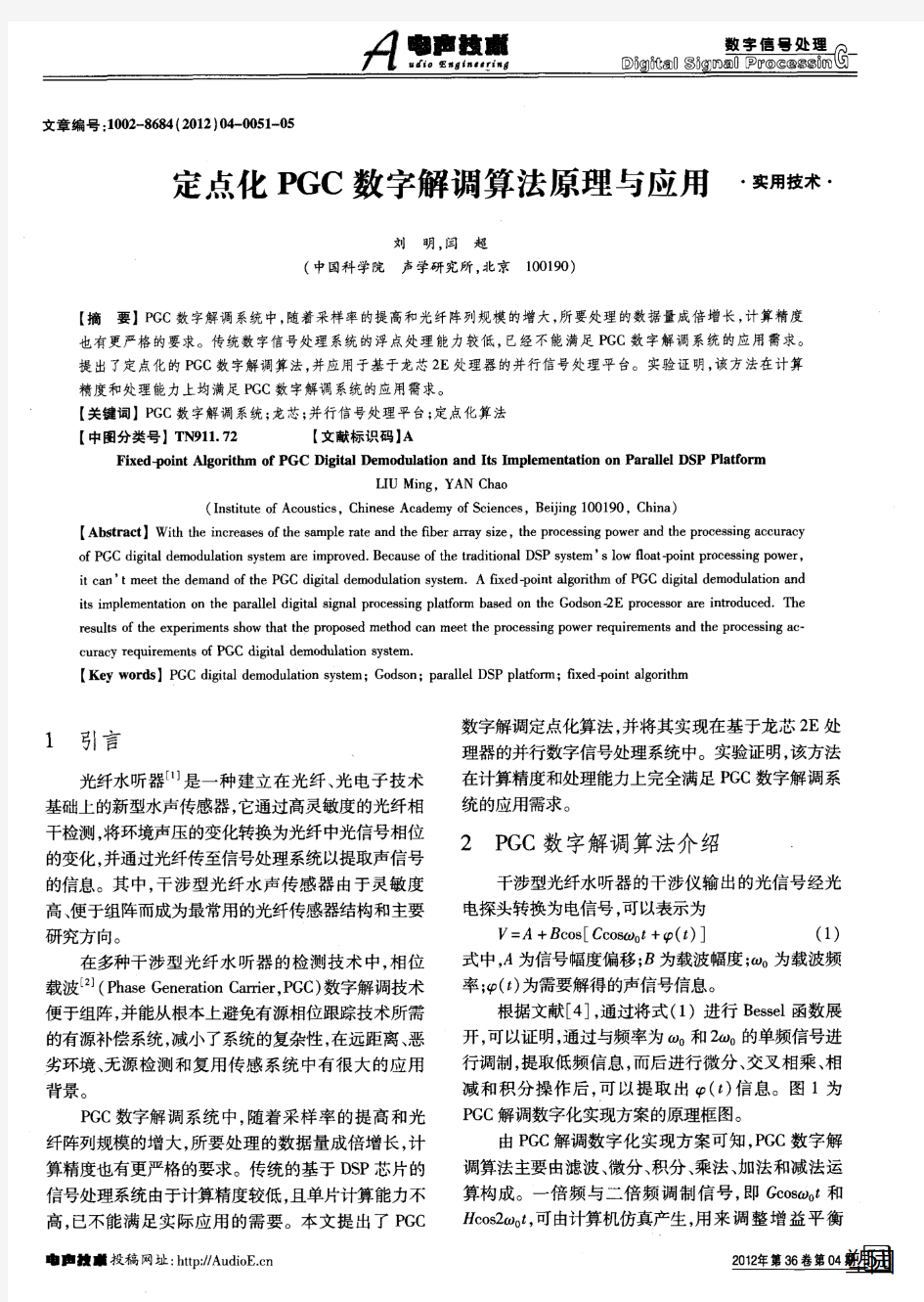
定点化PGC数字解调算法原理与应用

蚁群算法简述及实现
蚁群算法简述及实现 1 蚁群算法的原理分析 蚁群算法是受自然界中真实蚁群算法的集体觅食行为的启发而发展起来的一种基于群体的模拟进化算法,属于随机搜索算法,所以它更恰当的名字应该叫“人工蚁群算法”,我们一般简称为蚁群算法。M.Dorigo等人充分的利用了蚁群搜索食物的过程与著名的TSP问题的相似性,通过人工模拟蚁群搜索食物的行为来求解TSP问题。 蚂蚁这种社会性动物,虽然个体行为及其简单,但是由这些简单个体所组成的群体却表现出及其复杂的行为特征。这是因为蚂蚁在寻找食物时,能在其经过的路径上释放一种叫做信息素的物质,使得一定范围内的其他蚂蚁能够感觉到这种物质,且倾向于朝着该物质强度高的方向移动。蚁群的集体行为表现为一种正反馈现象,蚁群这种选择路径的行为过程称之为自催化行为。由于其原理是一种正反馈机制,因此也可以把蚁群的行为理解成所谓的增强型学习系统(Reinforcement Learning System)。 引用M.Dorigo所举的例子来说明蚁群发现最短路径的原理和机制,见图1所示。假设D 和H之间、B和H之间以及B和D之间(通过C)的距离为1,C位于D和B的中央(见图1(a))。现在我们考虑在等间隔等离散世界时间点(t=0,1,2……)的蚁群系统情况。假设每单位时间有30只蚂蚁从A到B,另三十只蚂蚁从E到D,其行走速度都为1(一个单位时间所走距离为1),在行走时,一只蚂蚁可在时刻t留下浓度为1的信息素。为简单起见,设信息素在时间区间(t+1,t+2)的中点(t+1.5)时刻瞬时完全挥发。在t=0时刻无任何信息素,但分别有30只蚂蚁在B、30只蚂蚁在D等待出发。它们选择走哪一条路径是完全随机的,因此在两个节点上蚁群可各自一分为二,走两个方向。但在t=1时刻,从A到B的30只蚂蚁在通向H的路径上(见图1(b))发现一条浓度为15的信息素,这是由15只从B走向H的先行蚂蚁留下来的;而在通向C的路径上它们可以发现一条浓度为30的信息素路径,这是由15只走向BC的路径的蚂蚁所留下的气息与15只从D经C到达B留下的气息之和(图1(c))。这时,选择路径的概率就有了偏差,向C走的蚂蚁数将是向H走的蚂蚁数的2倍。对于从E到D来的蚂蚁也是如此。 (a)(b)(c) 图1 蚁群路径搜索实例 这个过程一直会持续到所有的蚂蚁最终都选择了最短的路径为止。 这样,我们就可以理解蚁群算法的基本思想:如果在给定点,一只蚂蚁要在不同的路径中选择,那么,那些被先行蚂蚁大量选择的路径(也就是信息素留存较浓的路径)被选中的概率就更大,较多的信息素意味着较短的路径,也就意味着较好的问题回答。
粒子群算法和蚁群算法的结合及其在组合优化中的应用
2007年第2期空间电子技术收稿日期:2006-04-03;收修改稿日期:2006-04-30 粒子群算法和蚁群算法的结合及其在 组合优化中的应用 张长春苏昕易克初 (西安电子科技大学综合业务网国家重点实验室,西安710071) 摘要文章首次提出了一种用于求解组合优化问题的PAAA算法。该算法有效地 结合了粒子群算法和蚁群算法的优点,先利用粒子群算法的随机性、快速性、全局性得到初始信息素分布(即粗搜索),再利用蚁群算法的并行性、正反馈性、求解精度高等优点求精确解(即细搜索)。将文中提出的算法用于经典TSP问题的求解,仿真结果表明PAAA算法兼有两种算法的优点,同时抛弃了各自的缺点。该算法在时间效率上优于蚁群算法,在求精效率上优于粒子群算法,是综合了两种算法长处的一种新的启发式算法,达到时间性能和优化性能上的双赢,获得了非常好的效果。 主题词蚁群算法粒子群算法旅行商问题PAAA 0引言 近年来对生物启发式计算(Bio-inspiredComputing)的研究,越来越引起众多学者的关注和兴 趣,产生了神经网络、 遗传算法、模拟退火、粒子群算法、蚁群算法等许多用于解决复杂优化问题的新方法。然而,面对各种问题的特殊性和复杂性,每种算法都表现出了自身的优势和缺陷,都存在时间性能和优化性能不能兼得的矛盾。粒子群优化(ParticleSwarmOptimization,PSO)算法[1,2]是由Eberhart和Kennedy于1995年提出的一种全局优化算法,该算法源于对鸟群觅食行为的模拟。它的优势在于:(1)算法简洁,可调参数少,易于实现;(2)随机初始化种群,具有较强的全局搜索能力,类似于遗传算法;(3)利用评价函数衡量个体的优劣程度,搜索速度快;(4)具有较强的可扩展性。其缺点是:不能充分利用系统中的反馈信息,求解组合优化问题的能力不强。 蚁群算法[3,4](AntColonyOptimization,ACO)是由意大利学者M.Dorigo,V.Maniezzo和A.Colorni 于20世纪90年代初提出的一种新型的智能优化算法,已经被应用到TSP问题[5,6]、二次分配问题、工件调度问题、图着色问题等许多经典组合优化问题中,取得了很好的效果。它的优点是:(1)采用一种正反馈机制,通过信息素的不断更新,达到最终收敛于最优路径上的目的;(2)是一种分布式的优化方法,易于并行实现;(3)是一种全局优化的方法,不仅可用于求解单目标优化问题,而且可用于求解多目标优化问题;(4)适合于求解离散优化问题;(5)鲁棒性强。但由于在算法的初始阶段信息素匮乏,所以求解速度较慢。 文章将粒子群算法和蚁群算法有机地结合,提出了PAAA算法。它利用粒子群算法的较强的全局搜索能力生成信息素分布,再利用蚁群算法的正反馈机制求问题的精确解,汲取各自的优势,以达空间电子技术SPACEELECTRONICTECHNOLOGY76
GFSK的调制解调原理
G F S K的调制和解调原理 高斯频移键控GFSK(GaussfrequencyShiftKeying),是在调制之前通过一个高斯低通滤波器来限制信号的频谱宽度,以减小两个不同频率的载波切换时的跳变能量,使得在相同的数据传输速率时频道间距可以变得更紧密。它是一种连续相位频移键控调制技术,起源于FSK(Frequency-shiftkeying)。但FSK带宽要求在相当大的程度上随着调制符号数的增加而增加。而在工业,科学和医用433MHz频段的带宽较窄,因此在低数据速率应用中,GFSK调制采用高斯函数作为脉冲整形滤波器可以减少传输带宽。由于数字信号在调制前进行了Gauss 预调制滤波,因此GFSK调制的信号频谱紧凑、误码特性好,在数字移动通信中得到了广泛使用(高斯预调制滤波器能进一步减小调制频谱,它可以降低频率转换速度,否则快速的频率转换将导致向相邻信道辐射能量)。 GFSK调制 1、直接调制:将数字信号经过高斯低通滤波后,直接对射频载波进行模拟调频。由于通常调制信号都是加在PLL频率合成器的VCO上(图一),其固有的环路高通特性将导致调制信号的低频分量受到损失,调制频偏(或相偏)较小。因此,为了保证调制器具有优良的低频调制特性,得到较为理想的GFSK调制特 另一部分则加在PLL的主分频器一端(基于PLL技术的频率合成器将增加两个分频器:一个用于降低基准频率,另一个则用于对VCO进行分频)。由于主分频器不在控制反馈环内,它能够被信号的低频分量所调制。这样,所产生的复合GFSK信号具有可以扩展到直流的频谱特性,且调制灵敏度基本上为一常量,不受环路带宽的影响。但是,两点调制增加了GFSK调制指数控制的难度。
动态规划算法原理与的应用
动态规划算法原理及其应用研究 系别:x x x 姓名:x x x 指导教员: x x x 2012年5月20日
摘要:动态规划是解决最优化问题的基本方法,本文介绍了动态规划的基本思想和基本步骤,并通过几个实例的分析,研究了利用动态规划设计算法的具体途径。关键词:动态规划多阶段决策 1.引言 规划问题的最终目的就是确定各决策变量的取值,以使目标函数达到极大或极小。在线性规划和非线性规划中,决策变量都是以集合的形式被一次性处理的;然而,有时我们也会面对决策变量需分期、分批处理的多阶段决策问题。所谓多阶段决策问题是指这样一类活动过程:它可以分解为若干个互相联系的阶段,在每一阶段分别对应着一组可供选取的决策集合;即构成过程的每个阶段都需要进行一次决策的决策问题。将各个阶段的决策综合起来构成一个决策序列,称为一个策略。显然,由于各个阶段选取的决策不同,对应整个过程可以有一系列不同的策略。当过程采取某个具体策略时,相应可以得到一个确定的效果,采取不同的策略,就会得到不同的效果。多阶段的决策问题,就是要在所有可能采取的策略中选取一个最优的策略,以便得到最佳的效果。动态规划是一种求解多阶段决策问题的系统技术,可以说它横跨整个规划领域(线性规划和非线性规划)。在多阶段决策问题中,有些问题对阶段的划分具有明显的时序性,动态规划的“动态”二字也由此而得名。动态规划的主要创始人是美国数学家贝尔曼(Bellman)。20世纪40年代末50年代初,当时在兰德公司(Rand Corporation)从事研究工作的贝尔曼首先提出了动态规划的概念。1957年贝尔曼发表了数篇研究论文,并出版了他的第一部著作《动态规划》。该著作成为了当时唯一的进一步研究和应用动态规划的理论源泉。在贝尔曼及其助手们致力于发展和推广这一技术的同时,其他一些学者也对动态规划的发展做出了重大的贡献,其中最值得一提的是爱尔思(Aris)和梅特顿(Mitten)。爱尔思先后于1961年和1964年出版了两部关于动态规划的著作,并于1964年同尼母霍思尔(Nemhauser)、威尔德(Wild)一道创建了处理分枝、循环性多阶段决策系统的一般性理论。梅特顿提出了许多对动态规划后来发展有着重要意义的基础性观点,并且对明晰动态规划路径的数
计算智能大作业--蚁群算法解决TSP问题
(计算智能大作业) 应用蚁群算法求解TSP问题
目录 蚁群算法求解TSP问题 (3) 摘要: (3) 关键词: (3) 一、引言 (3) 二、蚁群算法原理 (4) 三、蚁群算法解决TSP问题 (7) 四、解决n个城市的TSP问题的算法步骤 (9) 五、程序实现 (11) 六、蚁群算法优缺点分析及展望 (18) 七、总结 (18)
采用蚁群算法解决TSP问题 摘要:蚁群算法是通过蚂蚁觅食而发展出的一种新的启发算法,该算法已经成功的解决了诸如TSP问题。本文简要学习探讨了蚂蚁算法和TSP问题的基本内容,尝试通过matlab 仿真解决一个实例问题。 关键词:蚁群算法;TSP问题;matlab。 一、引言 TSP(Travelling Salesman Problem)又称货郎担或巡回售货员问题。TSP问题可以描述为:有N个城市,一售货员从起始城市出发,访问所有的城市一次,最后回到起始城市,求最短路径。TSP问题除了具有明显的实际意义外,有许多问题都可以归结为TSP问题。目前针对这一问题已有许多解法,如穷举搜索法(Exhaustive Search Method), 贪心法(Greedy Method), 动态规划法(Dynamic Programming Method)分支界定法(Branch-And-Bound),遗传算法(Genetic Agorithm)模拟退火法(simulated annealing),禁忌搜索。本文介绍了一种求解TSP问题的算法—蚁群算法,并通过matlab仿真求解50个城市之间的最短距离,经过仿真试验,证明是一种解决TSP问题有效的方法。
蚁群算法原理及在TSP中的应用(附程序)
蚁群算法原理及在TSP 中的应用 1 蚁群算法(ACA )原理 1.1 基本蚁群算法的数学模型 以求解平面上一个n 阶旅行商问题(Traveling Salesman Problem ,TSP)为例来说明蚁群算法ACA (Ant Colony Algorithm )的基本原理。对于其他问题,可以对此模型稍作修改便可应用。TSP 问题就是给定一组城市,求一条遍历所有城市的最短回路问题。 设()i b t 表示t 时刻位于元素i 的蚂蚁数目,()ij t τ为t 时刻路径(,)i j 上的信息量,n 表示TSP 规模,m 为蚁群的总数目,则1()n i i m b t ==∑;{(),}ij i i t c c C τΓ=?是t 时刻集合C 中元素(城市)两两连接ij t 上残留信息量的集合。在初始时刻各条路径上信息量相等,并设 (0)ij const τ=,基本蚁群算法的寻优是通过有向图 (,,)g C L =Γ实现的。 蚂蚁(1,2,...,)k k m =在运动过程中,根据各条路径上的信息量决定其转移方向。这里用禁忌表(1,2,...,)k tabu k m =来记录蚂蚁k 当前所走过的城市,集合随着 k tabu 进化过程作动态调整。在搜索过程中,蚂蚁根据各条路径上的信息量及路 径的启发信息来计算状态转移概率。()k ij p t 表示在t 时刻蚂蚁k 由元素(城市)i 转移 到元素(城市)j 的状态转移概率。 ()*()()*()()0k ij ij k k ij ij ij s allowed t t j allowed t t p t αβ αβτητη??????????? ∈?????=????? ??? ∑若否则 (1) 式中,{}k k allowed C tabuk =-表示蚂蚁k 下一步允许选择的城市;α为信息启发式因子,表示轨迹的相对重要性,反映了蚂蚁在运动过程中所积累的信息在蚂蚁运动时所起作用,其值越大,则该蚂蚁越倾向于选择其他蚂蚁经过的路径,蚂蚁之间协作性越强;β为期望启发式因子,表示能见度的相对重要性,反映了蚂蚁在运动过程中启发信息在蚂蚁选择路径中的重视程度,其值越大,则该状态转移概率越接近于贪心规则;()ij t η为启发函数,其表达式如下: 1 ()ij ij t d η= (2)
GFSK的调制解调原理
GFSK 的调制和解调原理 高斯频移键控GFSK (Gauss frequency Shift Keying),是在调制之前通过一个高斯低通滤波器来限制信号的频谱宽度,以减小两个不同频率的载波切换时的跳变能量,使得在相同的数据传输速率时频道间距可以变得更紧密。它是一种连续相位频移键控调制技术,起源于FSK(Frequency- shift keying)。但FSK 带宽要求在相当大的程度上随着调制符号数的增加而增加。而在工业,科学和医用433MHz 频段的带宽较窄,因此在低数据速率应用中,GFSK 调制采用高斯函数作为脉冲整形滤波器可以减少传输带宽。由于数字信号在调制前进行了Gauss 预调制滤波,因此GFSK 调制的信号频谱紧凑、误码特性好,在数字移动通信中得到了广泛使用(高斯预调制滤波器能进一步减小调制频谱,它可以降低频率转换速度,否则快速的频率转换将导致向相邻信道辐射能量)。 GFSK 调制 1、直接调制:将数字信号经过高斯低通滤波后,直接对射频载波进行模拟调 频。由于通常调制信号都是加在PLL 频率合成器的VCO 上(图一),其固有的环路高通特性将导致调制信号的低频分量受到损失,调制频偏(或相偏)较小。因此,为了保证调制器具有优良的低频调制特性,得到较为理想的GFSK 调制特性,提出了一种称为两点调制的直接调频技术。 uc 图一 两点调制:调制信号被分成2部分,一部分按常规的调频法加在PLL 的VCO 端,另一部分则加在PLL 的主分频器一端(基于PLL 技术的频率合成器将增加两个分频器:一个用于降低基准频率,另一个则用于对VCO 进行分频 )。由于主分频器不在控制反馈环内,它能够被信号的低频分量所调制。这样,所产生的复合GFSK 信号具有可以扩展到直流的频谱特性,且调制灵敏度基本上为一常量, 鉴频器 PD 环路低通滤波器LF 压控振荡器VCO 载波信号 调制信号ui 调频信号uo 主分频器
蚁群算法综述
《智能计算—蚁群算法基本综述》 班级:研1102班 专业:计算数学 姓名:刘鑫 学号: 1107010036 2012年
蚁群算法基本综述 刘鑫 (西安理工大学理学院,研1102班,西安市,710054) 摘要:蚁群算法( ACA)是一种广泛应用于优化领域的仿生进化算法。ACA发展背景着手,分析比较国内外ACA研究团队与发展情况立足于基本原理,分析其数学模型,介绍了六种经典的改进模型,对其优缺点进行分析,简要总结其应用领域并对其今后的发展、应用做出展望。 关键词:蚁群;算法;优化;改进;应用 0引言 专家发现单个蚂蚁只具有一些简单的行为能力。但整个蚁群却能完成一系列复杂的任务。这种现象是通过高度组织协调完成的1991年。意大利学者M.Dorigo 首次提出一种新型仿生算法ACA。研究了蚂蚁的行为。提出其基本原理及数学模型。并将之应用于寻求旅行商问题(TSP)的解。 通过实验及相关理论证明,ACA有着有着优化的选择机制的本质。而这种适应和协作机制使之具有良好的发现能力及其它算法所没有的优点。如较强的鲁棒性、分布式计算、易与其他方法结合等;但同时也不应忽略其不足。如搜索时间较长,若每步进行信息素更新,计算仿真时所占用CPU时间过长:若当前最优路径不是全局最优路径,但其信息素浓度过高时。靠公式对信息素浓度的调整不能缓解这种现象。会陷人局部收敛无法寻找到全局最优解:转移概率过大时,虽有较快的收敛速度,但会导致早熟收敛。所以正反馈原理所引起的自催化现象意在强化性能好的解,却容易出现停滞现象。笔者综述性地介绍了ACA对一些已有的提出自己的想法,并对其应用及发展前景提出了展望。 1 蚁群算法概述 ACA源自于蚁群的觅食行为。S.Goss的“双桥”实验说明蚂蚁总会选择距食物源较短的分支蚂蚁之间通过信息素进行信息的传递,捷径上的信息素越多,吸引的蚂蚁越多。形成正反馈机制,达到一种协调化的高组织状态该行为称集体自催化目前研究的多为大规模征兵,即仅靠化学追踪的征兵。 1 .1 蚁群算法的基本原理
FM调制解调原理
频率调制信号的表示式为:()cos[()]t m c S t A t kfm d ωττ-∞ =+ ? 其中,kf 为 调频灵敏度,m(t)为调制信号。从公式出发即可完成频率调制的程序。 调频信号的解调方法通常是采用鉴频法。方框图如图所示 其中鉴频器包括微分电路和包络检波。 在模拟信号的调频程序中,先对输入参量的个数做出判断,少于则运行默认的。然后对信号进行调制,这里采样的调制信号是最简单的正弦信号,当然也可以为其他信号。调制过程中,积分是根据积分的定义编写的一段程序。在对已调信号进行解调前加入了噪声。解调过程中的微分同样的根据定义编写的,当然也可以采用MATLAB 里自带的函数diff 。在经过包络检波后对幅值做出了一定的修正。 下图是调频信号的时域频域波形。经过调频之后的信号频谱不仅发生了频谱搬移还增加了频率分量。
下图绿色的是小信噪比条件下的解调波形,可以发现信噪比对解调的影响。 而在语音信号的调频中,积分采用cumsum来完成,微分采用diff。因为经过调试发现,采用根据定义编写的程序由于循环运行需
要很多时间。另外,在经过微分器后,包络检波和低通这段和幅度调制的非相干解调一样,所以也可以在经过微分后调用AM包络检波的程序。对于调频信号来说,都会存在门限效应,使之在小信噪比情况下无法恢复出原来的调制信号。所以语音信号的调制解调是在很大信噪比情况下。
下面是语音信号调制解调的时域频域图。观看频谱可以看到调制信号的频谱相对于输入信号,发生了频谱搬移,还有在fc处多了一个冲激。 另外还有一个需要注意的问题,读入语音信号时所输入的路径必须和存放语音信号的路径相同。否则无法打开。 参考文献: [1]樊昌信,曹丽娜。通信原理。国防工业出版社。 [2] Santosh, the LNM IIT Jaipur (India).陈丽丹。FM调制解调系统设计与仿真
通信原理2DPSK调制与解调实验报告
通信原理课程设计报告
一. 2DPSK基本原理 1.2DPSK信号原理 2DPSK方式即是利用前后相邻码元的相对相位值去表示数字信息的一种方式。现假设用Φ表示本码元初相与前一码元初相之差,并规定:Φ=0表示0码,Φ=π表示1码。则数字信息序列与2DPSK信号的码元相位关系可举例表示如2PSK信号是用载波的不同相位直接去表示相应的数字信号而得出的,在接收端只能采用相干解调,它的时域波形图如图2.1所示。 图1.1 2DPSK信号 在这种绝对移相方式中,发送端是采用某一个相位作为基准,所以在系统接收端也必须采用相同的基准相位。如果基准相位发生变化,则在接收端回复的信号将与发送的数字信息完全相反。所以在实际过程中一般不采用绝对移相方式,而采用相对移相方式。 定义?Φ为本码元初相与前一码元初相之差,假设: ?Φ=0→数字信息“0”; ?Φ=π→数字信息“1”。 则数字信息序列与2DPSK信号的码元相位关系可举例表示如下: 数字信息: 1 0 1 1 0 1 1 1 0 1
DPSK信号相位:0 π π 0 π π 0 π 0 0 π 或:π 0 0 π 0 0 π 0 π π 0 2. 2DPSK信号的调制原理 一般来说,2DPSK信号有两种调试方法,即模拟调制法和键控法。2DPSK 信号的的模拟调制法框图如图1.2.1所示,其中码变换的过程为将输入的单极性不归零码转换为双极性不归零码。 图1.2.1 模拟调制法 2DPSK信号的的键控调制法框图如图1.2.2所示,其中码变换的过程为将输入的基带信号差分,即变为它的相对码。选相开关作用为当输入为数字信息“0”时接相位0,当输入数字信息为“1”时接pi。 图1.2.2 键控法调制原理图 码变换相乘 载波 s(t)e o(t)
matlab蚁群算法精讲及仿真图
蚁群算法matlab精讲及仿真 4.1基本蚁群算法 4.1.1基本蚁群算法的原理 蚁群算法是上世纪90年代意大利学者M.Dorigo,v.Maneizz。等人提出来的,在越来越多的领域里得到广泛应用。蚁群算法,是一种模拟生物活动的智能算法,蚁群算法的运作机理来源于现实世界中蚂蚁的真实行为,该算法是由Marco Dorigo 首先提出并进行相关研究的,蚂蚁这种小生物,个体能力非常有限,但实际的活动中却可以搬动自己大几十倍的物体,其有序的合作能力可以与人类的集体完成浩大的工程非常相似,它们之前可以进行信息的交流,各自负责自己的任务,整个运作过程统一有序,在一只蚂蚁找食物的过程中,在自己走过的足迹上洒下某种物质,以传达信息给伙伴,吸引同伴向自己走过的路径上靠拢,当有一只蚂蚁找到食物后,它还可以沿着自己走过的路径返回,这样一来找到食物的蚂蚁走过的路径上信息传递物质的量就比较大,更多的蚂蚁就可能以更大的机率来选择这条路径,越来越多的蚂蚁都集中在这条路径上,蚂蚁就会成群结队在蚁窝与食物间的路径上工作。当然,信息传递物质会随着时间的推移而消失掉一部分,留下一部分,其含量是处于动态变化之中,起初,在没有蚂蚁找到食物的时候,其实所有从蚁窝出发的蚂蚁是保持一种随机的运动状态而进行食物搜索的,因此,这时,各蚂蚁间信息传递物质的参考其实是没有价值的,当有一只蚂蚁找到食物后,该蚂蚁一般就会向着出发地返回,这样,该蚂蚁来回一趟在自己的路径上留下的信息传递物质就相对较多,蚂蚁向着信息传递物质比较高的路径上运动,更多的蚂蚁就会选择找到食物的路径,而蚂蚁有时不一定向着信
息传递物质量高的路径走,可能搜索其它的路径。这样如果搜索到更短的路径后,蚂蚁又会往更短的路径上靠拢,最终多数蚂蚁在最短路径上工作。【基于蚁群算法和遗传算法的机器人路径规划研究】 该算法的特点: (1)自我组织能力,蚂蚁不需要知道整体环境信息,只需要得到自己周围的信息,并且通过信息传递物质来作用于周围的环境,根据其他蚂蚁的信息素来判断自己的路径。 (2)正反馈机制,蚂蚁在运动的过程中,收到其他蚂蚁的信息素影响,对于某路径上信息素越强的路径,其转向该路径的概率就越大,从而更容易使得蚁群寻找到最短的避障路径。 (3)易于与其他算法结合,现实中蚂蚁的工作过程简单,单位蚂蚁的任务也比较单一,因而蚁群算法的规则也比较简单,稳定性好,易于和其他算法结合使得避障路径规划效果更好。 (4)具有并行搜索能力探索过程彼此独立又相互影响,具备并行搜索能力,这样既可以保持解的多样性,又能够加速最优解的发现。 4.1.2 基本蚁群算法的生物仿真模型 a为蚂蚁所在洞穴,food为食物所在区,假设abde为一条路径,eadf为另外一条路径,蚂蚁走过后会留下信息素,5分钟后蚂蚁在两条路径上留下的信息素的量都为3,概率可以认为相同,而30分钟后baed路径上的信息素的量为60,明显大于eadf路径上的信息素的量。最终蚂蚁会完全选择abed这条最短路径,由此可见,
蚁群算法
蚁群算法的改进与应用 摘要:蚁群算法是一种仿生优化算法,其本质是一个复杂的智能系统,它具有较强的鲁棒性、优良的分布式计算机制和易于与其他方法结合等优点。但是现在蚁群算法还是存在着缺点和不足,需要我们进一歩改进,如:搜索时间长、容易出现搜索停滞现象、数学基础还不完整。本文首先说明蚁群算法的基本思想,阐述了蚁群算法的原始模型及其特点,其次讨论如何利用遗传算法选取蚁群算法的参数,然后结合对边缘检测的蚁群算法具体实现过程进行研究分析,最后对本论文所做的工作进行全面总结,提出不足之处,并展望了今后要继续研究学习的工作内容。 关键词:蚁群算法;边缘检测;阈值;信息素;遗传算法; 1 前言 蚁群算法是近年来提出的一种群体智能仿生优化算法,是受到自然界中真实的蚂蚁群寻觅食物过程的启发而发现的。蚂蚁之所以能够找到蚁穴到食物之间的最短路径是因为它们的个体之间通过一种化学物质来传递信息,蚁群算法正是利用了真实蚁群的这种行为特征,解决了在离散系统中存在的一些寻优问题。该算法起源于意大利学者 Dorigo M 等人于 1991 年首先提出的一种基于种群寻优的启发式搜索算法,经观察发现,蚂蚁在寻找食物的过程中其自身能够将一种化学物质遗留在它们所经过的路径上,这种化学物质被学者们称为信息素。这种信息素能够沉积在路径表面,并且可以随着时间慢慢的挥发。在蚂蚁寻觅食物的过程中,蚂蚁会向着积累信息素多的方向移动,这样下去最终所有蚂蚁都会选择最短路径。该算法首先用于求解著名的旅行商问题(Traveling Salesman Problem,简称 TSP)并获得了较好的效果,随后该算法被用于求解组合优化、函数优化、系统辨识、机器人路径规划、数据挖掘、网络路由等问题。 尽管目前对 ACO 的研究刚刚起步,一些思想尚处于萌芽时期,但人们已隐隐约约认识到,人类诞生于大自然,解决问题的灵感似乎也应该来自大自然,因此越来越多人开始关注和研究 ACO,初步的研究结果已显示出该算法在求解复杂优化问题(特别是离散优化问题)方面的优越性。虽然 ACO 的严格理论基础尚未奠定,国内外的有关研究仍停留在实验探索阶段,但从当前的应用效果来看,这种自然生物的新型系统寻优思想无疑具有十分光明的前景。但该算法存在收敛速度慢且容易出现停滞现象的缺点,这是因为并不是所有的候选解都是最优解,而候选解却影响了蚂蚁的判断以及在蚂蚁群体中,单个蚂蚁的运动没有固定的规则,是随机的,蚂蚁与蚂蚁之间通过信息素来交换信息,但是对于较大规模的优化问题,这个信息传递和搜索过程比较繁琐,难以在较短的时间内找到一个最优的解。 由于依靠经验来选择蚁群参数存在复杂性和随机性,因此本文最后讨论如何利用遗传算法选取蚁群算法的参数。遗传算法得到的蚁群参数减少了人工选参的不确定性以及盲目性。 2 基本蚁群算法 2.1 蚁群算法基本原理 根据仿生学家的研究结果表明,单只蚂蚁不能找到从巢穴到食物源的最短路 径,而大量蚂蚁之间通过相互适应与协作组成的群体则可以,蚂蚁是没有视觉的,但是是通过蚂蚁在它经过的路径上留下一种彼此可以识别的物质,叫信息素,来相互传递信息,达到协作的。蚂蚁在搜索食物源的过程中,在所经过的路径上留下信息素,同时又可以感知并根据信息素的浓度来选择下一条路径,一条路径上的浓度越浓,蚂蚁选择该条路径的概率越大,并留下信息素使这条路径上的浓度加强,这样会有更多的蚂蚁选择次路径。相反,信息素浓度少的路
蚁群算法原理与应用讲解
蚁群算法在物流系统优化中的应用 ——配送中心选址问题 LOGO https://www.360docs.net/doc/c818200601.html,
框架 蚁群算法概述 蚁群算法模型 物流系统中配送中心选择问题 蚁群算法应用与物流配送中心选址 算法举例
蚁群算法简介 ?蚁群算法(Ant Algorithm简称AA)是近年来刚刚诞生的随机优化方法,它是一种源于大自然的新的仿生类算法。由意大利学者Dorigo最早提出,蚂蚁算法主要是通过蚂蚁群体之间的信息传递而达到寻优的目的,最初又称蚁群优化方法(Ant Colony Optimization简称ACO)。由于模拟仿真中使用了人工蚂蚁的概念,因此亦称蚂蚁系统(Ant System,简称AS)。
蚁群觅食图1 ?How do I incorporate my LOGO and URL to a slide that will apply to all the other slides? –On the [View]menu, point to [Master],and then click [Slide Master]or [Notes Master].Change images to the one you like, then it will apply to all the other slides. [ Image information in product ] ?Image : www.wizdata.co.kr ?Note to customers : This image has been licensed to be used within this PowerPoint template only. You may not extract the image for any other use.
FSK调制解调原理及设计
一.2FSK 调制原理: 1、2FSK 信号的产生: 2FSK 是利用数字基带信号控制在波的频率来传送信息。例如,1码用频率f1来传输,0码用频率f2来传输,而其振幅和初始相位不变。故其表示式为 式中,假设码元的初始相位分别为1θ和2θ;112 f π=ω和222f π=ω为两个不同的码元的角频率;幅度为A 为一常数,表示码元的包络为矩形脉冲。 2FSK 信号的产生方法有两种: (1)模拟法,即用数字基带信号作为调制信号进行调频。如图1-1(a )所示。 (2)键控法,用数字基带信号)(t g 及其反)(t g 相分别控制两个开关门电路,以此对两个载波发生器进行选通。如图1-1(b )所示。 这两种方法产生的2FSK 信号的波形基本相同,只有一点差异,即由调频器产生的2FSK 信号在相邻码元之间的相位是连续的,而键控法产生的2FSK 信号,则分别有两个独立的频率源产生两个不同频率的信号,故相邻码元的相位不一定是连续的。 (a) (b) 2FSK 信号产生原理图 由键控法产生原理可知,一位相位离散的2FSK 信号可看成不同频率交替发送的两个2ASK 信号之和,即 其中)(t g 是脉宽为s T 的矩形脉冲表示的NRZ 数字基带信号。 其中,n a 为n a 的反码,即若1=n a ,则0=n a ;若0=n a ,则1=n a 。 2、2FSK 信号的频谱特性: 由于相位离散的2FSK 信号可看成是两个2ASK 信号之和,所以,这里可以直接应用2ASK 信号的频谱分析结果,比较方便,即 2FSK 信号带宽为 s s F S K R f f f f f B 2||2||21212+-=+-≈ 式中,s s f R =是基带信号的带宽。 二.2FSK 解调原理: 仿真是基于非相干解调进行的,即不要求载波相位知识的解调和检测方法。 其非相干检测解调框图如下 M 信号非相干检测解调框图 当k=m 时检测器采样值为: 当k ≠m 时在样本和中的信号分量将是0,只要相继频率之间的频率间隔是,就与相移值无关了,于是其余相关器的输出仅有噪声组成。 其中噪声样本{}和{}都是零均值,具有相等的方差 对于平方律检测器而言,即先计算平方包络
KNN算法原理及应用
KNN分类算法(理论)
目录 1.KNN算法 (1) 2.KNN算法描述 (1) 3.KNN主要的应用领域 (2) 4.KNN算法的优、缺点 (2)
1.KNN算法 KNN算法,右又叫K最邻近分类算法,是数据挖掘分类技术中最简单的方法之一。所谓K最近邻,就是k个最近的邻居的意思,说的是每个样本都可以用它最接近的k个邻居来代表。 KNN算法概括来说,就是已知一个样本空间里的部分样本分成几个类,然后,给定一个待分类的数据,通过计算找出与自己最接近的K个样本,由这K个样本投票决定待分类数据归为哪一类。kNN算法在类别决策时,只与极少量的相邻样本有关。由于kNN方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别的,因此对于类域的交叉或重叠较多的待分样本集来说,kNN方法较其他方法更为适合。 2.KNN算法描述 一个比较经典的KNN图如下: 从上图中我们可以看到,图中的有两个类型的样本数据,一类是蓝色的正方形,另一类是红色的三角形。而那个绿色的圆形是我们待分类的数据。 如果K=3,那么离绿色点最近的有2个红色三角形和1个蓝色的正方形,这3个点投票,于是绿色的这个待分类点属于红色的三角形。
如果K=5,那么离绿色点最近的有2个红色三角形和3个蓝色的正方形,这5个点投票,于是绿色的这个待分类点属于蓝色的正方形。 3.KNN主要的应用领域 文本分类、聚类分析、预测分析、模式识别、图像处理。 KNN算法不仅可以用于分类,还可以用于预测。通过找出一个样本的k个最近邻居,将这些邻居的属性的平均值赋给该样本,就可以得到该样本的属性。更有用的方法是将不同距离的邻居对该样本产生的影响给予不同的权值(weight),如权值与距离成反比。 4.KNN算法的优、缺点 优点 (1) 简单,易于理解,易于实现,无需估计参数,无需训练; (2) 适合对稀有事件进行分类; (3) 特别适合于多分类问题(multi-modal,对象具有多个类别标签),kNN比SVM的表现要好。 缺点 (1) 当样本不平衡时,如一个类的样本容量很大,而其他类样本容量很小时,有可能导致当输入一个新样本时,该样本的K个邻居中大容量类的样本占多数。 (2) 计算量较大,因为对每一个待分类的文本都要计算它到全体已知样本的距离,才能求得它的K个最近邻点。
蚁群算法的基本原理
2.1 蚁群算法的基本原理 蚁群优化算法是模拟蚂蚁觅食的原理,设计出的一种群集智能算法。蚂蚁在觅食过程中能够在其经过的路径上留下一种称之为信息素的物质,并在觅食过程中能够感知这种物质的强度,并指导自己行动方向,它们总是朝着该物质强度高的方向移动,因此大量蚂蚁组成的集体觅食就表现为一种对信息素的正反馈现象。某一条路径越短,路径上经过的蚂蚁越多,其信息素遗留的也就越多,信息素的浓度也就越高,蚂蚁选择这条路径的几率也就越高,由此构成的正反馈过程,从而逐渐的逼近最优路径,找到最优路径。 蚂蚁在觅食过程时,是以信息素作为媒介而间接进行信息交流,当蚂蚁从食物源走到蚁穴,或者从蚁穴走到食物源时,都会在经过的路径上释放信息素,从而形成了一条含有信息素的路径,蚂蚁可以感觉出路径上信息素浓度的大小,并且以较高的概率选择信息素浓度较高的路径。 (a) 蚁穴 1 2 食物源 A B (b) 人工蚂蚁的搜索主要包括三种智能行为: (1)蚂蚁的记忆行为。一只蚂蚁搜索过的路径在下次搜索时就不再被该蚂蚁选择,因此在蚁群算法中建立禁忌表进行模拟。 (2)蚂蚁利用信息素进行相互通信。蚂蚁在所选择的路径上会释放一种信息素的物质,当其他蚂蚁进行路径选择时,会根据路径上的信息素浓度进行选择,这样信息素就成为蚂蚁之间进行通信的媒介。 (3)蚂蚁的集群活动。通过一只蚂蚁的运动很难达到事物源,但整个蚁群进行搜索就完全不同。当某些路径上通过的蚂蚁越来越多时,路径上留下的信息素数量也就越多,导致信息素强度增大,蚂蚁选择该路径的概率随之增加,从而进一步增加该路径的信息素强度,而通过的蚂蚁比较少的路径上的信息素会随着时间的推移而挥发,从而变得越来越少。3.3.1蚂蚁系统 蚂蚁系统是最早的蚁群算法。其搜索过程大致如下: 在初始时刻,m 只蚂蚁随机放置于城市中, 各条路径上的信息素初始值相等,设为:0(0)ij ττ=为信息素初始值,可设0m m L τ=,m L 是由最近邻启发式方法构 造的路径长度。其次,蚂蚁(1,2,)k k m = ,按照随机比例规则选择下一步要转
四.蚁群算法的基本原理
四.蚁群算法基本原理 引言: 各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当一只找到食物以后,它会向环境释放一种挥发性分泌物pheromone (称为信息素,该物质随着时间的推移会逐渐挥发消失,信息素浓度的大小表征路径的远近)来实现的,吸引其他的蚂蚁过来,这样越来越多的蚂蚁会找到食物。有些蚂蚁并没有象其它蚂蚁一样总重复同样的路,他们会另辟蹊径,如果另开辟的道路比原来的其他道路更短,那么,渐渐地,更多的蚂蚁被吸引到这条较短的路上来。最后,经过一段时间运行,可能会出现一条最短的路径被大多数蚂蚁重复着。这就是要讲的蚁群算法。 一.蚁群算法 蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。蚁群算法是一种模拟进化算法,初步的研究表明该算法具有许多优良的性质。针对PID 控制器参数优化设计问题,将蚁群算法设计的结果与遗传算法设计的结果进行了比较,数值仿真结果表明,蚁群算法具有一种新的模拟进化优化方法的有效性和应用价值。 二.蚁群算法原理 蚁群优化算法是模拟蚂蚁觅食的原理,设计出的一种群集智能算法。蚂蚁在觅食过程中能够在其经过的路径上留下一种称之为信息素的物质,并在觅食过程中能够感知这种物质的强度,并指导自己行动方向,它们总是朝着该物质强度高的方向移动,因此大量蚂蚁组成的集体觅食就表现为一种对信息素的正反馈现象。某一条路径越短,路径上经过的蚂蚁越多,其信息素遗留的也就越多,信息素的浓度也就越高,蚂蚁选择这条路径的几率也就越高,由此构成的正反馈过程,从而逐渐的逼近最优路径,找到最优路径。 蚂蚁在觅食过程时,是以信息素作为媒介而间接进行信息交流,当蚂蚁从食物源走到蚁穴,或者从蚁穴走到食物源时,都会在经过的路径上释放信息素,从而形成了一条含有信息素的路径,蚂蚁可以感觉出路径上信息素浓度的大小,
ZUC算法原理及实现过程
Z U C 算法原理及实现过程 1.1算法设计背景 ZUC 算法,即祖冲之算法,是3GPP 机密性算法EEA3和完整性算法EIA3的核心,为中国自主设计的流密码算法。2009年5月ZUC 算法获得3GPP 安全算法组SA 立项,正式申请参加3GPPLTE 第三套机密性和完整性算法标准的竞选工作。历时两年多的时间,ZUC 算法经过评估,于2011年9月正式被3GPPSA 全会通过,成为3GPPLTE 第三套加密标准核心算法。ZUC 算法是中国第一个成为国际密码标准的密码算法。 1.2算法原理 ZUC 是一个面向字的流密码。它采用128位的初始密钥作为输入和一个128位的初始向量(IV ),并输出关于字的密钥流(从而每32位被称为一个密钥字)。密钥流可用于对信息进行加密/解密。 ZUC 的执行分为两个阶段:初始化阶段和工作阶段。在第一阶段,密钥和初始向量进行初始化,即不产生输出。第二个阶段是工作阶段,在这个阶段,每一个时钟脉冲产生一个32比特的密钥输出。 (1)运算符说明 mod 整数模 ⊕ 整数比特异或 a b 字符串a 和b 的连接 H a a 二进制表示的最左16位值 L a a 二进制表示的最右16位值 n a k <<< a 向左k 比特的循环移位 1a >> a 向右1比特的移位 ()()1212,,,,,,n n a a a b b b →i a 值分配到对应i b 的值 (2)算法结构 ZUC 有三个逻辑层,见下图。顶层为一个线性反馈移位寄存器(LFSR )的16个赛段,中间层是比特重组(BR ),最下层为一个非线性函数F 。 图1ZUC 的整体结构图 (3)线性移位反馈寄存器(LFSR ) LFSR 具有16个31比特的单元()0115,, ,s s s ,每个单元()015i s i ≤≤取值均在下面 的集合中: LFSR 有两种模式的操作,即初始化模式和工作模式。在初始化模式中,LFSR 接收一个31比特的输入u ,u 是删除非线性函数F 的32位输出W 最右边的位得到的。也就是说,可将初始化模式工作原理表示为: LFSRWithInitialisationMode (u ) {
多目标蚁群算法及其实现
多目标蚁群算法及其实现 李首帅(2012101020019) 指导老师:张勇 【摘要】多目标优化问题对于现阶段来说,是十分热门的。本文将对多目标规划当中的旅行商问题,通过基于MATLAB的蚁群算法来解决,对多目标问题进行局部优化。 【关键词】旅行商问题;蚁群算法;MATLAB 一、背景介绍 旅行商问题是物流领域当中的典型问题,它的求解十分重要。蚁群算法是受自然界中真实蚁群的集体行为的启发而提出的一种基于群体的模拟进化算法,属于随机搜索算法。M. Dorigo等人充分利用了蚁群搜索食物的过程与旅行商问题(TSP)之间的相似性,通过人工模拟蚁群搜索食物的行为(即蚂蚁个体之间通过间接通讯与相互协作最终找到从蚁穴到食物源的最短路径)来求解TSP问题。为区别于真实蚁群,称算法中的蚂蚁为“人工蚂蚁”。人们经过大量研究发现,蚂蚁个体之间是通过一种称之为信息素(pheromone)的物质进行信息传递,从而能相互协作,完成复杂的任务。蚁群之所以表现出复杂有序的行为,个体之间的信息交流与相互协作起着重要的作用。蚂蚁在运动过程中,能够在它所经过的路径上留下该种物质,而且能够感知这种物质的存在及其强度,并以此指导自己的运动方向。蚂蚁倾向于朝着该物质强度高的方向移动。因此,由大量蚂蚁组成的蚁群的集体行为便表现出一种信息正反馈现象:某一路径上走过的蚂蚁越多,则后来者选择该路径的概率就越大。蚂蚁个体之间就是通过这种信息的交流达到搜索食物的目的。 二、蚁群算法原理介绍 1.蚁群在路径上释放信息素; 2.碰到还没走过的路口,就随机挑选一条路走。同时释放与路径长度有关的信息素; 3.信息素浓度与路长成反比; 4.最优路径上的信息浓度越来越大; 5.最终蚁群找到最优路径。 其实自然界中,蚁群这种寻找路径的过程表现是一种正反馈的过程,与人工蚁群的优化算法很相近。所以我们简单功能的工作单元视为蚂蚁,则上述的搜寻路径过程可以用来解释人工蚁群搜寻过程。 人工蚁群和自然界蚁群各具特点。人工蚁群具有一定的记忆能力。它能够记忆已经访问过的节点;另外,人工蚁群在选择下一条路径的时候并不是完全盲目的,而是按一定的算法规律有意识地寻找最短路径。而自然界蚁群不具有记忆的能力,它们的选路凭借外激素,或者
决策树算法的原理与应用
决策树算法的原理与应用 摘要:在机器学习与大数据飞速发展的21世纪,各种不同的算法成为了推动发 展的基石.而作为十大经典算法之一的决策树算法是机器学习中十分重要的一种算法。本文对决策树算法的原理,发展历程以及在现实生活中的基本应用进行介绍,并突出说明了决策树算法所涉及的几种核心技术和几种具有代表性的算法模式。 关键词:机器学习算法决策树 1.决策树算法介绍 1.1算法原理简介 决策树模型是一种用于对数据集进行分类的树形结构。决策树类似于数据结 构中的树型结构,主要是有节点和连接节点的边两种结构组成。节点又分为内部 节点和叶节点。内部节点表示一个特征或属性, 叶节点表示一个类. 决策树(Decision Tree),又称为判定树, 是一种以树结构(包括二叉树和多叉树)形式表达的 预测分析模型,决策树算法被评为十大经典机器学习算法之一[1]。 1.2 发展历程 决策树方法产生于上世纪中旬,到了1975年由J Ross Quinlan提出了ID3算法,作为第一种分类算法模型,在很多数据集上有不错的表现。随着ID3算法的 不断发展,1993年J Ross Quinlan提出C4.5算法,算法对于缺失值补充、树型结 构剪枝等方面作了较大改进,使得算法能够更好的处理分类和回归问题。决策树 算法的发展同时也离不开信息论研究的深入,香农提出的信息熵概念,为ID3算 法的核心,信息增益奠定了基础。1984年,Breiman提出了分类回归树算法,使 用Gini系数代替了信息熵,并且利用数据来对树模型不断进行优化[2]。 2.决策树算法的核心 2.1数据增益 香农在信息论方面的研究,提出了以信息熵来表示事情的不确定性。在数据 均匀分布的情况下,熵越大代表事物的越不确定。在ID3算法中,使用信息熵作 为判断依据,在建树的过程中,选定某个特征对数据集进行分类后,数据集分类 前后信息熵的变化就叫作信息增益,如果使用多个特征对数据集分别进行分类时,信息增益可以衡量特征是否有利于算法对数据集进行分类,从而选择最优的分类 方式建树。 如果一个随机变量X的可以取值为Xi(i=1…n),那么对于变量X来说,它 的熵就是 在得到基尼指数增益之后,选择基尼指数增益最大的特征来作为当前步骤的 分类依据,在之后的分类中重复迭代使用这一方法来实现模型的构造。 3. 决策树算法的优缺点 3.1决策树算法的优点[3] (1)计算速度快,算法简单,分类依据清晰 (2)在处理数据时,有很高的准确度,同时分类结果清晰,步骤明朗。 (3)可以处理连续和种类字段 (4)适合高维数据 3.2决策树算法的缺点 (1)决策树算法可以帮助使用者创建复杂的树,但是在训练的过程中,如