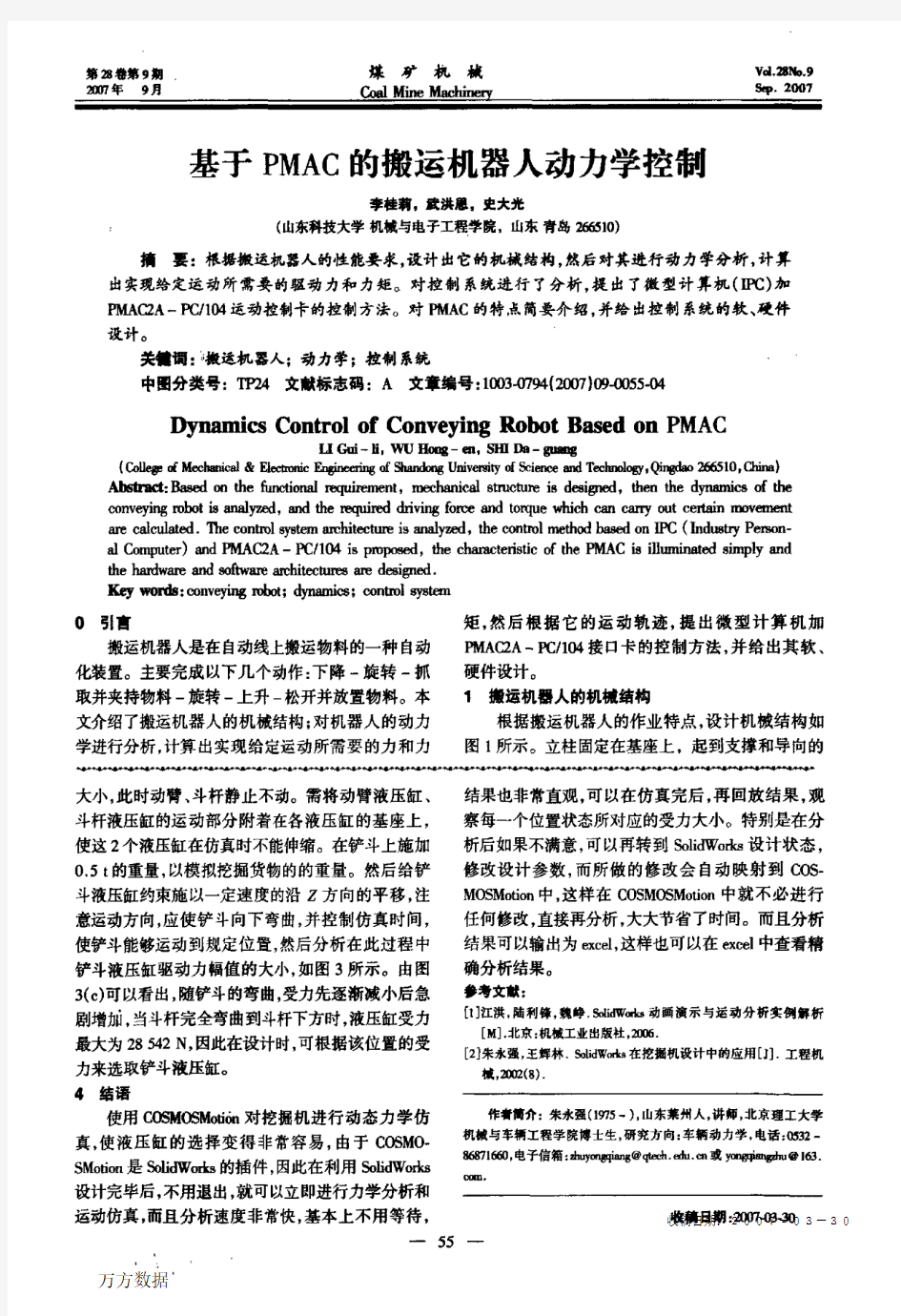
基于PMAC的搬运机器人动力学控制
基于PMAC的搬运机器人动力学控制
作者:李桂莉, 武洪恩, 史大光, LI Gui-li, WU Hong-en, SHI Da-guang
作者单位:山东科技大学,机械与电子工程学院,山东,青岛,266510
刊名:
煤矿机械
英文刊名:COAL MINE MACHINERY
年,卷(期):2007,28(9)
参考文献(5条)
1.牛志刚;张建民;孙宏昌构建PMAC数控系统的关键技术和实现方法[期刊论文]-制造业自动化 2005(11)
2.李桂莉;武洪恩;刘志海搬运机械手的运动学分析[期刊论文]-煤矿机械 2007(02)
3.蔡自兴机器人学 2000
4.张冰蔚;黄彬;王佳基于PMAC的活塞车床开放式数控系统[期刊论文]-机电一体化 2006(01)
5.陈勇;高昆;方文鹏PMAC在X52K铣床数控系统改造中的开发应用[期刊论文]-煤矿机械 2007(07)
本文读者也读过(10条)
1.薛纭.张毅弹性杆的Kirchhoff动力学比拟:从静力学到动力学[会议论文]-2007
2.董旭.田东兴.杨嵩.DONG Xu.TIAN Dong-xing.YANG Song基于PMAC的三自由度并联机床数控系统硬件开发[期刊论文]-北华航天工业学院学报2008,18(3)
3.林光春.徐礼钜.高山树型机器人动力学解析模型[期刊论文]-机械科学与技术2003,22(6)
4.王凌宇旋转机械实时在线状态监测系统研究——现场工作站设计[学位论文]2004
5.SONG Danlu.YANG Lingling.CHEN Weichuang.SHI Xiao RESEARCH ON DATA PROCESSING TECHNOLOGY OF RAPID PROTOTYPING BASED ON LASER-INDUCED CHEMICAL LIQUID DEPOSITION[会议论文]-2009
6.潘建峰.范剑.白建华基于DSP核心控制器的开放式数控系统的研制[期刊论文]-机械制造2006,44(11)
7.张建生.赵登峰.ZHANG Jian-sheng.ZHAO Deng-feng动力学中的复杂现象分岔、混沌及在冲击消振系统中的应用[期刊论文]-现代机械2006(1)
8.岳峰.YUE Feng码垛区翻转电磁头的动力学分析[期刊论文]-装备制造技术2009(3)
9.马文婷基于MEGA64单片机的智能搬运机器人设计[期刊论文]-科技信息2011(30)
10.胥思平.狄勤丰.张新旭.朱卫平.张洪泉.Xu Siping.Di Qinfeng.Zhang Xinxu.Zhu Weiping.Zhang Hongquan 预弯曲动力学防斜快钻技术的试验研究[期刊论文]-天然气工业2006,26(3)
本文链接:https://www.360docs.net/doc/cd11603283.html,/Periodical_mkjx200709023.aspx
机器人的动力学控制
机器人的动力学控制 The dynamics of robot control 自123班 庞悦 3120411054
机器人的动力学控制 摘要:机器人动力学是对机器人机构的力和运动之间关系与平衡进行研究的学科。机器人动力学是复杂的动力学系统,对处理物体的动态响应取决于机器人动力学模型和控制算法。机器人动力学主要研究动力学正问题和动力学逆问题两个方面,需要采用严密的系统方法来分析机器人动力学特性。本文使用MATLAB 来对两关节机器人模型进行仿真,进而对两关节机器人进行轨迹规划,来举例说明独立PD 控制在机器人动力学控制中的重要作用。 Abstract: for the robot dynamics is to study the relation between the force and movement and balance of the subject.Robot dynamics is a complex dynamic system, on the dynamic response of the processing object depending on the robot dynamics model and control algorithm.Kinetics of robot research dynamics problem and inverse problem of two aspects, the need to adopt strict system method for the analysis of robot dynamics.This article USES MATLAB to simulate two joints, the robot, in turn, the two joints, the robot trajectory planning, to illustrate the independent PD control plays an important part in robot dynamic control. 一 动力学概念 机器人的动力学主要是研究动力学正问题和动力学逆问题两个方面,再进一步研究机器人的关节力矩,使机器人的机械臂运动到指定位臵,其控制算法一共有三种:独立PD 控制,前馈控制和计算力矩控制,本文主要介绍独立PD 控制。 动力学方程:)()(),()(q G q F q q q C q q M +++=? ????τ
物料搬运机器人手的系统设计
天津大学 毕业设计 中文题目:物料搬运机器人手部系统的设计 英文题目:Material handling system design robot Hand department 学生姓名 系别机电 专业班级 2 指导教 成绩评定 2010年6月
目录 1 引言 (1) 1.1 机器人概述 (1) 1.2 机器人的研究历史及现状 (1) 1.3 机器人的发展趋势 (2) 2 手部的设计与计算 (3) 2.1 手部的设计 (3) 2.2 驱动方式 (3) 2.3 手部夹紧力的计算 (5) 2.4 弹簧的计算[6] (5) 2.5 手部电机选择原则【7】........................... 错误!未定义书签。 2.5.1 一般执行电机的选择原则...................... 错误!未定义书签。 2.5.2 电机的选用.................................. 错误!未定义书签。 2.6 手部电机参数计算.............................. 错误!未定义书签。 2.7 电机转速与夹紧力速度几何关系的确定............ 错误!未定义书签。 3 手臂的设计与计算............................... 错误!未定义书签。 3.1 手臂结构设计.................................. 错误!未定义书签。 3.2 手部质量计算.................................. 错误!未定义书签。 3.2.1 爪子的质量计算.............................. 错误!未定义书签。 3.2.2 手部外壳质量计算............................ 错误!未定义书签。 3.2.3 手部主轴的质量计算.......................... 错误!未定义书签。 3.2.4 其它部件的质量估算.......................... 错误!未定义书签。 3.3 手臂计算及电机选择............................ 错误!未定义书签。 4 结论.......................................... 错误!未定义书签。【参考文献】................................... 错误!未定义书签。致谢............................................ 错误!未定义书签。附录1:英文文献 .................................. 错误!未定义书签。附录2:英文文献翻译 .............................. 错误!未定义书签。
【K12学习】《搬运机器人》教学设计
《搬运机器人》教学设计 课题:智能搬运 #### 一、背景分析 搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通项目分析过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和机器人的适应性。课程设置这一项目,其一是让学生了解当代机器人在工业中的应用与发展,理解搬运机器人的一般工作原理;其二是通过自己设计编程制作搬运机器人,理解传感器的工作原理,掌握程序的设计思想,并且使机器人能完成简单的项目任务。学生此前已经初步掌握了机器人的搭建技巧,能够根据任务设计制作简单的机器人结构,同时对机器人编程软件NXT Programming也有了一定的认识,能够完成简单的程序设计。在学情分析此基础上设计制作搬运机器人,在设计上更能体现学生的创新思维,以及编制程序的逻辑思维能力,同时于课程结果评价的可视化及挑战性,小组通过分工与协作,在兴趣以及好奇心的驱使下,能
够完成具有一定挑战性的任务。二、教学目标及重难点知识与技能掌握机器人项目实现的一般方法和技巧;掌握程序的优化方法。能够通过小组合作搭建具有一定功能的机器三维目标过程与方法人结构;会对机器人结构进行创新、优化设计。情感态度价值观增强对结构、系统等技术思想的理解;激发对机器人的兴趣,加深对技术的理性思考。重难点三、教法学法 重点难点掌握项目中的程序编写技巧和优化方法。多条件判断的实现。创设情境法:通过图片、视频等形式,实现将抽象任务形象化,通过角色扮演让学生身历其境的理解任务的要求与目标。教法任务驱动法:通过具体明确的任务驱动学生讨论、交流,培养学生的分析能力、判断能力、解决问题的能力以及自主学习、合作探究的意识。合作学习法:注重培养学生的协作精神,让学生在讨论中学习。学法探究学习法:设置探究问题,培养学生的创新思维和自主学习能力。四、教学过程 观看视频,了解项目的比赛流程和规则。 活动内容学生活动教师活动提出任务:观看视频,了解智能搬运项目的比赛流程和规则。分析:智能搬运的比赛规则观看视频,了解机器人完讨论:机器人执行什么任成任务的执行过程,分析务,比赛的规则。比赛规则: 1、小组合作完成比分组回答、补充。比赛规则
搬运机器人技术报告
2015中国工程机器人大赛暨国际公开赛(RoboWork) 机器人搬运工程(此处填写所参加赛事项目名称) 技术报告 参赛学校: 队伍名称: 参赛队员: 带队教师:(附联系方式) 二〇一五年七月
第一章前言 机器人竞赛是一项体育与高科技结合的对抗项目,涉及机械电子、智能控制、计算机技术、人工智能等多种学科和研究领域,是培养信息、自动化科技人才,展示高科技成果,促进实用化和产业化的新途径。各类机器人大赛的举办,对于普及机器人科学技术,促进人工智能与机器人技术的研究和应用都将产生重要推动作用。 江苏省大学生机器人大赛每两年举行一次。继 2004 年举办以来,经过近四年的努力和各方面的大力支持,江苏省的大学生机器人水平已走在全国前列,在中国机器人大赛、CCTV 杯电视机器人大赛、亚太机器人挑战赛、ROBOTCUP 足球世界杯的国内外机器人大赛中屡创佳绩。 第一章方案论证 根据设计要求,本系统主要由控制器模块、稳压电源模块、寻迹传感器模块、直流电机及其驱动模块、电压比较模块等模块构成。为较好的实现各模块的功能,我们分别设计了几种方案并分别进行了论 1.1 车体 方案 1:购买玩具电动车。购买的玩具电动车具有组装完整的车架车轮、电机及其驱动电路。但是一般的说来,玩具电动车具有如下缺点:首先,这种玩具电动车由于装配紧凑,使得各种所需传感器的安装十分不方便。其次,这种电动车一般都是前轮转向后轮驱动,不能方便迅速的实现原地保持坐标转 90 度甚至180 度的弯角。再次,玩具电动车的电机多为玩具直流电机,力矩小,空载转速快,负载性能差,不易调速。因此我们放弃了此方案。 方案2:自己制作电动车。首先确定车的模型。我们有过两种想法:一、车子做成四轮的:中间装同轴电机的两个轮子作为驱动;二、车子做成三轮的,后面两轮驱动,前面装万向轮。经过讨论,我们最终确定第一种想法。考虑到小车必须能够前进、倒退、停止,并能灵活转向,中间装同轴电机的两个轮子作为驱动。一个电机控制一边的轮子,一个正转,一个反转,这样实现转弯。为了能控制车轮的转速,可以采取PWM 调速法,即由单片机输出一系列频率固定的方波,再通过功率放大来驱动电机,在单片机中编程改变输出方波的占空比就可以改变加到电机上的平均电压,从而可以改变电机的转速。左右轮两个电机转速的配合就可以实现小车的前进、倒退、转弯等功能。在安装时我们保证两个驱动电机同轴。这种结构使得小车在前进时比较平稳,可以避免出现后轮过低而使左右两驱动轮驱动力不够的情况。 对于车架材料的选择,我们经过比较选择了铝板。用有铝板的车架比塑料车架更加牢固,比铁制小车更轻便,美观。 综上考虑,我们选择了方案2。 1.1传感器的安装 1.1.1 循迹原理 第一种是采用光敏三极管。即利用经高亮的LED灯发射出来的光在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射白光,当白光遇到白色纸时发生漫反射,反射光被装在小车上的光敏三极管接收;如果遇到绿线则红外光被吸收,小车上的光敏三极管接收不到反射光。单片机就是否收到反射回来的反射光为依据来确定白线的位置和小车的行走路线。 第二种是采用摄像头。通过摄像头采集数据,再将数据送入单片机处理。容易看出,处理摄像头采集回来的数据比较复杂,速度慢而且占用较大的CPU 资
循迹物料搬运机器人设计毕业设计
平顶山工业职业技术学院毕业设计 题目循迹物料搬运机器人设计
平顶山工业职业技术学院专科毕业设计(论文)诚信承诺书 本人郑重声明:所呈交的毕业设计(论文)(题目:循迹物料搬运机器人设计)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。 作者签名:年月日 (学号):
循迹物料搬运机器人设计 摘要 研究的目的、意义、研究方法与内容。 研究的结果与主要结论。 关键词:数控加工,数控仿真,加工环境,帮助文件
The development of …… Abstract A new kind sandwich structure(300个单词左右). Key Words:NC machining; NC verification; Machining environment; Help files
目录 摘要 (ⅰ) Abstract (ⅱ) 第一章引言 (1) 1.1 XXXXXXXXXXXX (10) 1.1.1 XXXXXX (15) 第二章 XXXXXXXXX (20) 1.2 XXXXXX (20) …… 第XX章总结与展望....................................................... XX 参考文献.................................................................. XX 致谢...................................................................... XX 附录...................................................................... XX
简单串联机器人ADAMS仿真
机械系统动力学 简化串联机器人的运动学与动力学仿真分析 学院:机械工程学院 专业:机械设计制造 及其自动化 学生姓名: 学号: 指导教师: 完成日期: 2015.01.09
摘要 在机器人研究中,串联机器人研究得较为成熟,其具有结构简单、成本低、控制简单、运动空间大等优点,已成功应用于很多领域。本文在ADAMS 中用连杆模拟两自由度的串联机器人(机械臂),对其分别进行运动学分析、动力学分析。得出该机构在给出工作条件下的位移、速度、加速度曲线和关节末端的运动轨迹。 关键词:机器人;ADAMS;曲线;轨迹 一、ADAMS软件简介 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.) (现已并入美国MSC公司)开发的虚拟样机分析软件。目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。 二、简化串联机器人的运动学仿真 (1)启动ADAMS/View。 在欢迎对话框中选择新建模型,模型取名为robot,并将单位设置为MMKS,然后单击OK。 (2)打开坐标系窗口。 按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗口。当鼠标在图形区移动时,在坐标窗口中显示了当前鼠标所在位置的坐标值。
最新工业机器人技术及应用(教案)-搬运机器人及其操作应用【精选】
第五章搬运机器人及其操作应用 5.1 搬运机器人的分类及特点 5.2 搬运机器人的系统组成 5.3 搬运机器人的作业示教 5.3.1 冷加工搬运机器人 5.3.2 热加工搬运机器人 学习目标导入案例课堂认知扩展与提高本章小结思考练习 5.4 搬运机器人的周边设备 5.4.1 周边设备 5.4.1 周边设备 课前回顾 如何使用在线示教方式进行工业机器人任务编程? 如何进行工业机器人离线作业示教再现? 学习目标 认知目标 了解搬运机器人的分类及特点 掌握搬运机器人的系统组成及其功能 熟悉搬运机器人作业示教的基本流程 熟悉搬运机器人的周边设备与布局 能力目标 能够识别搬运机器人工作站基本构成 能够进行搬运机器人的简单作业示教 导入案例 机器人助力机床上下料,国产高效智能压铸装备研制成功 智能压铸岛是以压铸机为核心设备构成的一组智能化生产单元,以无人化生产管理方式自动完成从原材料到合格铸件成品间的工艺生产流程,实现压铸生产的程序化、数字化和远程控制。高效智能压铸岛以压铸机为核心,配备 3-10 个机器人和多部 AGV 小车,集成多个控制系统、伺服系统、检测系统于一体,包括铝液智能熔化系统、伺服定量浇注系统、炉料回收系统、智能熔体含气量检测系统、真空压铸系统自动模温机、自动三维伺服喷涂机械手、耐高温抗腐蚀的装件
取件机器人、镶嵌自动快速加热和均温装置、自动型芯冷却系统、自动余料去除及飞边清理装置、大型精密压铸模具、输送带、冷却装置、在线智能检测系统、激光打标机、智能转运小车、压铸生产信息化管理系统、嵌入式专用控制器、压铸专家系统等设备和系统。 课堂认知 5.1 搬运机器人的分类及特点 搬运机器人具有通用性强、工作稳定的优点,且操作简便、功能丰富,逐渐向第三代智能机器人发展,其主要优点有。 动作稳定和提高搬运准确性。 提高生产效率,解放繁重体力劳动,实现“无人”或“少人”生产。 改善工人劳作条件,摆脱有毒、有害环境。 柔性高、适应性强,可实现多形状、不规则物料搬运。 定位准确,保证批量一致性。 降低制造成本,提高生产效益。 从结构形式上看,搬运机器人可分为龙门式搬运机器人、悬臂式搬运机器人、侧壁式搬运机器人、摆臂式搬运机器人和关节式搬运机器人。 龙门式搬运机器人 其坐标系主要由 X 轴、 Y 轴和 Z 轴组成。其多采用模块化结构,可依据负载位置、大小等选择对应直线运动单元及组合结构形式,可实现实现大物料、重吨位
机器人动力学汇总
机器人动力学研究的典型方法和应用 (燕山大学 机械工程学院) 摘 要:本文介绍了动力学分析的基础知识,总结了机器人动力学分析过程中比较常用的动力学分析的方法:牛顿—欧拉法、拉格朗日法、凯恩法、虚功原理法、微分几何原理法、旋量对偶数法、高斯方法等,并且介绍了各个方法的特点。并通过对PTl300型码垛机器人弹簧平衡机构动力学方法研究,详细分析了各个研究方法的优越性和方法的选择。 前 言:机器人动力学的目的是多方面的。机器人动力学主要是研究机器人机构的动力学。机器人机构包括机械结构和驱动装置,它是机器人的本体,也是机器人实现各种功能运动和操作任务的执行机构,同时也是机器人系统中被控制的对象。目前用计算机辅助方法建立和求解机器人机构的动力学模型是研究机器人动力学的主要方法。动力学研究的主要途径是建立和求解机器人的动力学模型。所谓动力学模指的是一组动力学方程(运动微分方程),把这样的模型作为研究力学和模拟运动的有效工具。 报告正文: (1)机器人动力学研究的方法 1)牛顿—欧拉法 应用牛顿—欧拉法来建立机器人机构的动力学方程,是指对质心的运动和转动分别用牛顿方程和欧拉方程。把机器人每个连杆(或称构件)看做一个刚体。如果已知连杆的表征质量分布和质心位置的惯量张量,那么,为了使连杆运动,必须使其加速或减速,这时所需的力和力矩是期望加速度和连杆质量及其分布的函数。牛顿—欧拉方程就表明力、力矩、惯性和加速度之间的相互关系。 若刚体的质量为m ,为使质心得到加速度a 所必须的作用在质心的力为F ,则按牛顿方程有:ma F = 为使刚体得到角速度ω、角加速度εω= 的转动,必须在刚体上作用一力矩M , 则按欧拉方程有:εωI I M += 式中,F 、a 、M 、ω、ε都是三维矢量;I 为刚体相对于原点通过质心并与刚
自动寻迹搬运机器人设计
摘要 从第一台机器人诞生至今,机器人的制造和发展已走过了半个多世纪的历程,全球工业机器人的装机量已超过百万台,形成了一个巨大的机器人产业。同时,非制造业用机器人近几年也发展迅速,并逐步向实用化发展。机器人的制造水平、控制速度和控制精度、可靠性等不断提高,而机器人的制造成本和价格却不断下降。机器人产业的潜力非常巨大,值得强调的是,“机器人产业”应该是“机器人技术”产业,或者叫机器人产业。正如IT产业不仅限于PC一样,机器人产业也包括所有与机器人技术相关的产业,在产业化大背景的驱动下,不久以后,未来机器人的发展水平将会得到飞跃性的提升。 机器人工程技术与人性化技术的共同发展,使得更多的机器人“德才兼备”,它们将会像人们想象中的机器人那样更接近于人类。目前已经比较成熟的机器人研究领域,使得科学家的研究方向不再像90年代初期那样随波逐流,更多创意化的设计理念被融入到了机器人的研究和制造中。 在未来高精度的产业机器人,高感知能力的家用机器人,以及虚拟仿真技术的研究型机器人将会逐步融入到人类社会的方方面面。也许在未来的某一天,在大街上密布的机器人大军将不再是科幻作品中的镜头。究竟机器人能有怎样的发展呢,下面就和大家一起来展望机器人技术的未来。 在当今社会中,机器人已被广泛的运用到每一个领域,如建筑、
医疗、采矿、核能、农牧渔业、航空航天、水下作业、救火、环境卫生、教育、娱乐、办公、家用等方面,有时它在极其恶劣的条件下工作,做某些单调、频繁和重复的长时间作业,它不仅给人们留下了良好的工作条件,而且给社会带来了巨大的财富。 关键词: 机器人机构制动装置
Abstract Birth date from the first robot, robot manufacturing and development has gone through the course of half a century, the global installed base of industrial robots have been more than a million units to form a giant robot industry. Meanwhile, the non-manufacturing industry has developed rapidly in recent years, robots, and gradually to practical development. Robot manufacturing level, control the speed and control accuracy, reliability continue to improve the robot's manufacturing costs and prices have been declining. Huge potential in the robotics industry, is worth emphasizing that, "the robotics industry" should be "robot technology" industries, or call the robotics industry. As the IT industry is not only limited to the PC like robots and robot industry also includes all technology-related industries in the industry, driven by the background of the near future, the future level of development of the robot will be a leap of improvement. Robot Engineering Technology and the common development of human technology, making more robots "ability and political integrity," they would be like people think of robots as closer to human beings. Is now relatively mature field of robotics,
毕业设计(论文)循迹物料搬运机器人设计讲解
编号 南京航空航天大学金城学院毕业设计题目循迹物料搬运机器人设计学生姓名 学号 系部 专业 班级 指导教师 二〇一一年六月
南京航空航天大学金城学院 本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:循迹物料搬运机器人设计)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。 作者签名:年月日 (学号):
毕业设计(论文)报告纸 循迹物料搬运机器人设计 摘要 研究的目的、意义、研究方法与内容。 研究的结果与主要结论。 关键词:数控加工,数控仿真,加工环境,帮助文件
毕业设计(论文)报告纸 The development of …… Abstract A new kind sandwich structure(300个单词左右). Key Words:NC machining; NC verification; Machining environment; Help files
毕业设计(论文)报告纸 目录 摘要 (ⅰ) Abstract (ⅱ) 第一章引言 (1) 1.1 XXXXXXXXXXXX (10) 1.1.1 XXXXXX (15) 第二章 XXXXXXXXX (20) 1.2 XXXXXX (20) …… 第XX章总结与展望....................................................... XX 参考文献.................................................................. XX 致谢...................................................................... XX 附录...................................................................... XX
码垛搬运机器人的特点、优点及发展前景
孺子牛机器人分析码垛搬运机器人的特点、优点及发展前景 在工业机器人的研究领域,智能化、微型化是机器人的未来发展方向,而具有避障功能和自动搬运功能的智能码垛搬运机器人是机器人研究领域的一个研究热点,在民用和军用领域应用前景广阔。 随着时代的发展,高效、快速是生产技术的主要任务,为解放多余劳动力,提高生产效率,减少生产成本,缩短生产周期,智能搬运机器人便应运而生,它可以代替人工进行货物的分类,搬运和装卸工作或代替人类搬运危险物品,如放射性物质、有毒物质等,降低工人的劳动强度,提高生产和工作效率,保证了工人的人身安全,实现自动化、智能化、无人化。该作品使用微处理器使机器人具有简单的思维能力,利用较为先进的传感器准确的识别物体,由处理器进行分析处理,并通过驱动系统和机械机构做出相应的反应。该作品可以广泛应用于自动化无人工厂、车间、货运站、码头等,较多劳动力的场所,可使工作效率提高大约50%,大大降低成本,并实现节能环保。 东莞市孺子牛机器人有限公司自主研发、世界首创的“立体分配式高效全自动化集装箱码头装卸系统”。同一集装箱泊位采用该系统后,装卸效率比原来至少提高50%,堆场存箱量提高25%,大大降低运行成本并实现节能环保。二智能叉车结合条码技术、无线局域网技术和数据采集技术,形成现场作业系统;将企业管理系统延伸到作业人员的手掌中或叉车上,使其工作更方便、系统更智能;将无线车载终端装备到叉车上,由信息引导作业。本搬运机器人能在任意区域内沿寻迹线行走,自动绕开障碍,并能停在指定地点;识别不同货物并放在不同的指定地点,它的操作手能对货物进行升降、抓紧或放下等工作;它还能显示整个运行过程的时间和距离;并且在出现故障时发出报警。 机器人控制系统以arduino单片机作为检测和控制的核心,采用红外光电传感器检测路面寻迹线,使用超声波传感器检测障碍物,用光电传感器或者微动开关检测、判断机器手是否到位,应用PWM技术动态控制电动机的转动方向和转速。本机器人控制系统利用硬件描述语言设计机器人控制器,实现机器人行走、转弯、绕障、停止以及机器手升降、抓紧或放下的精确控制。 机器人根据输入的各种检测信息,按照为机器人设置的要求,自动地进行信息处理、分析和计算,作出相应的控制决策或判断,并通过输出通道发出控制指令,控制各电机进行工作。 该作品将机械传动与单片机有机结合,单片机控制直流伺服电机。软件编程使机器人具有简单的思维,使其智能化,相对于现在的技术,此作品有较强的扩展空间和实用性,可通过改变传感器类型,实现不同的功能,例如可以在车体上GPS模块使其行走路线更精确,工作效率更高,因此该作品有较强的可行性。 东莞市孺子牛机器人有限公司设计研发生产的码垛搬运机器人有以下4个创新的优点: 1、智能识别不同物体并进行分类、搬运、传送,实现过程自动化。 2、通过图像识别控制机器的方法,可应用到其他领域。 3、微处理器对机械的准确控制和目标的准确跟踪。 4、码垛机器人可以利用传感器准确找到并分辨出已经标记的不同的物体,将物体转运到指定位置。过程中实现寻线、避障,实现智能分类、装卸、搬运的功能。
二自由度机器人的位置控制
实验二自由度机器人的位置控制 一、实验目的 1. 运用Matlab语言、Simulink及Robot工具箱,搭建二自由度机器人的几何模 型、动力学模型, 2. 构建控制器的模型,通过调整控制器参数,对二自由度机器人的位姿进行控 制,并达到较好控制效果。 二、工具软件 1.Matlab软件 2.Simulink动态仿真环境 3.robot工具箱 模型可以和实际中一样,有自己的质量、质心、长度以及转动惯量等,但需要注意的是它所描述的模型是理想的模型,即质量均匀。这个工具箱还支持Simulink的功能,因此,可以根据需要建立流程图,这样就可以使仿真比较明了。 把robot 工具箱拷贝到MATLAB/toolbox文件夹后,打开matalb软件,点击file--set path,在打开的对话框中选add with subfolders,选中添加MATLAB/toolbox/robot,保存。这是在matlab命令窗口键入roblocks就会弹出robot 工具箱中的模块(如下图)。
三、实验原理 在本次仿真实验中,主要任务是实现对二自由度机器人的控制,那么首先就要创建二自由度机器人对象, 二自由度机器人坐标配置 仿真参数如下表1: 表1 二连杆参数配置
1.运动学模型构建二连杆的运动学模型,搭建twolink模型在MATLAB命令窗口下用函数drivebot(WJB)即可观察到该二连杆的动态位姿图。 %文件名命名为自己名字的首字母_twolink %构造连杆一 L{1}=link([0 0.45 0 0 0],'standard') ; L{1}.m=23.9 ;
PLC在搬运机器人控制系统中的应用
龙源期刊网 https://www.360docs.net/doc/cd11603283.html, PLC在搬运机器人控制系统中的应用 作者:车丰 来源:《山东工业技术》2016年第06期 摘要:实用性和可靠性已经成为了现代可控制编程器发展的主旋律,从这两个角度出 发,设计出了由PLC组成的搬运机器人控制系统。其系统运行的结果表明,搬运机器人系统在任何状态下的运行效果都属于良性,你并且具有结构简单、便于操作等特点。本文针对PLC 在搬运机器人控制系统中的应用进行了详细阐述,并对其操作结构以及组成部分进行简要概括。 关键词:PLC;搬运机器人;控制系统 DOI:10.16640/https://www.360docs.net/doc/cd11603283.html,ki.37-1222/t.2016.06.130 0 引言 搬运机器人存在一定的柔和性,灵活性是其动作特点,在上下料的工作中得到了重用。搬运机器人在很早就得到了充分的利用,但效果却没有达到实际效果。现如今,机器人技术在飞速发展,并且在一定程度上取得了质的飞跃,简单可靠成为了机器人研发的标准,本文针对机器人的可靠性和实用性,对可编程序控制器组成的搬运机器人控制系统进行详细分析。 1 搬运机器人的操作系统部分 以班级机器人只有简单的一种类型,但具有两个自由度,其重复定位系统非常精确,高低升降技术由点击来进行驱动,并作回转运动。活动横梁是有一定的范围的,在这个范围上将螺母固定上去,横梁即可沿着轨道进行运动,是呈上下运动的。当进行摆动运动时,也是有电机进行驱动的,通过减速器减速,输出轴带动平衡杆运动。机器人末尾处的平衡杆即为执行器,执行器上是带有吸盘的,负压发生器在进行作业时,吸盘可以将与其接触的物体牢牢吸住。机器人运动部件的质量都是相当大的,因此需要装油平衡气缸,进行有效的调节。 2 搬运机器人的控制构成部分 机器人的硬件配置相对于其他来说是非常高端的,是采用某种可编程序控制器作为主控计算机的[1]。PLC通过读写指令进行单元之间的相互交换,控制单元在工作时会收到来做PLC 的指令,这个指令与交流系统相连接,实现位置与速度的反馈。控制面板上会设有开关,这个开关是针对模式的选择设置的,可使机器人处于三种不同的个工作状态。在控制面板上安装一个显示屏,使对机器人的工作位置得以了解,对机器人工作位置的实时显示,并能显示机器人的状态信息,还能起到报警器的作用。位置控制单元向通用RAM区不停地写入数据,其速度大约是10ms执行一次,而对状态的写入大概需要1ms的时间,为了保证对每一和程序进行扫面时所得到的数据是准确的,可以采用块程序结构来解决问题。
智能循迹小车
摘要 进入二十一世纪,随着计算机技术和科学技术的不断进步,机器人技术较以往已经有了突飞猛进的提高,智能循迹小车即带有视觉和触觉的小车就是其中的典型代表。本文论述了基于单片机的智能循迹小车的控制过程。智能循迹是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。智能循迹小车是一个运用传感器、单片机、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现循迹导航的高新科技。该技术已经应用于无人驾驶机动车,无人工厂,仓库,服务机器人等多种领域。 本设计采用AT89C51单片机作为小车的控制核心;用红外探测传感器作为小车的循迹模块来识别白色路面中央的黑色引导线,采集信号并将信号转换为能被单片机识别的数字信号;采用驱动芯片L298构成双控制直流电机,其中软件系统采用C程序,本设计的电路结构简单,容易实现,可靠性高。 关键词:单片机;智能;自动循迹。
目录 1 绪论 (1) 2 设计要求 .............................................................................................. 错误!未定义书签。 3 系统设计分析 ...................................................................................... 错误!未定义书签。 4 系统基本组成 ...................................................................................... 错误!未定义书签。 5 设计步骤及流程图 .............................................................................. 错误!未定义书签。6系统所需元器件 (3) 7主要模块介绍 (3) 7.1 L298驱动模块简介 (3) 7.2 LM016L显示模块 (4) 8小车运动逻辑 (6) 9系统原理图 (6) 10系统程序设计 (7) 11系统仿真 (17) 12结果分析 (17) 13感想与收获 (19)
智能搬运小车( 完整 )
智能搬运小车 哈尔滨工程大学信息与通信工程学院080813班 摘要: 关键词:单片机,PWM,光电传感器,运货小车 1.引言 1.1智能搬运小车研究的背景和目的: 运货是各个行业不可或缺的过程,人工运货随着经济的快速发展,不能完全满足市场的需求。世界上许多国家都在积极进行智能车辆的研究和开发设计。移动机器人是机器人学中的一个重要分支,出现于20世纪60年代。当时斯坦福研究院的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注。 智能搬运小车可以安装不同的末端以完成各种不同形状和状态的工件搬运工作,可以广泛应用于机床上下料,冲压机自动化生产线,自动装配流水线,码垛搬运,集装箱等的自动搬运,大大减轻了人类繁重的体力劳动,具有广阔的市场前景。 1.2智能搬运小车的功能介绍: 智能搬运小车希望能够希望得到可以自动抓取货物,循迹行进,自动卸货物的功能。 2.总体方案及论证 2.1系统结构框图:
89C52单片机 PWM 波 直流稳压电 源 减速直流电 机光传感器自动循迹舵机 夹取货物 电压比较器 图1.系统结构框图 2.2具体设计: 整个系统包括单片机控制模块、电机驱动模块、光电传感器模块、机械手模块、模拟电源模块、小车车体。将单片机控制模块,驱动模块固定在小车上端;光电电传感器安装在小车底部;将机械手安装在小车上部的前端;车架结构选择铝板。 2.2.1系统机械部分 采用铝板安装设计图纸自行加工。即根据图纸首先用剪床剪得合适大小的铝板,再用钳工和折床将铝板做成合适的形状,再用钻床钻孔,用车床加工轴,用铣床加工轴套,最后安装即可得到所需的机械部分。
基于单片机控制的搬运机器人开题报告
北京XX大学毕业设计(论文)开题报告 题目:基于单片机控制的搬运机器人设计 专业:电子信息工程指导教师: 学院:学号: 班级:姓名: 一、课题任务与目的 本课题是设计并制作一台基于单片机控制的搬运机器人。该机器人能在规定区域内沿寻迹线行走,按要求停在指定地点,通过操作手的控制实现对货物的抓取、升降及放下等操作。机器人控制系统以51单片机作为检测和控制的核心,采用相应传感器检测各种信号,采用PWM控制方式实现寻迹行走速度、行走方向及机器手的各种运动控制。 课题设计要求完成以下工作与任务: 1、基于51单片机的智能搬运机器人的电路与机械设计; 实现51单片机与循迹单元的传感器、移动单元的电机和抓取单元的舵机与电磁铁的电路的设计与制作,进行单片机对各执行单元的控制命令的编程。 2、通过实验完成成品并进行基础搬运工作。 二、调研资料情况 1、机械人的发展情况 从1959年美国第一台工业机器人到本世纪80年代初,机器人技术经历了一个长期缓慢的发展过程。经过40年的发展,美国已经是机器人强国之一。在日本机器人的起步晚于美国五、六年,在经历了摇篮期和实用期后,在1980年进入普及提高并广泛应用期,一跃成为“机器人王国”,在出口和使用方面都居于世界的榜首。但自20世纪90年代中期,随着欧洲和北美工业机器人的崛起,国际市场由日本转向欧洲和北美,在经过几年低迷后,在21世纪初期随着我国和周边几个国家对工业机器人的大量需求,日本的工业机器人又重新焕发了生机。而我国的机器人起步较晚,经过“七五”起步、“八五”和“九五”进行攻关,在近几年取得了较大的发展。截止2007年底,我国共有工业机器人2.39万台,是日本的1/15、北美的1/7,其中完全国产工业机器人占三成左右,其余都是从日本、美国、德国等20多个国家引进。从20世纪90年代以来,机器人技术的应用已经从制造领域扩充到非制造领域,研究发展基于非机构环境、极限环
智能搬运机器人比赛规则
附件4:分拣机器人(智能搬运机器人)比赛规则 1、比赛目的 设计一个轮式或人形小型机器人,在比赛场地里移动,将不同颜色、形状或者材质的物体分类搬运到不同的对应位置。比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。它模拟了工业自动化过程中自动化物流系统实际工作过程。 2、比赛内容及任务 项目1 :规定项目比赛 比赛任务:在规定时间内,机器人完成物料的分类搬运,并回到出发点。 比赛分组:根据电机转速分为舵机组和无差别组,每组细分为轮式机器人和人形机器人两个组别。 机器人从出发区出发,到达物料储存区后,分拣其赛前抽签决定好的任务,即从5个预知颜色料块(黄、白、红、黑、蓝)选3种颜色料块的已知6种组合(任务)中,选其中1个作为比赛任务(其料块均要求摆放在场地图的A、C、E位置,B、D位置不放置物料,场地图参见比赛规则一:比赛场地),再按照设计好的控制策略控制机器人动作,以便将三个料块快速准确地搬运到对应的三个颜色中心区域内,最后回到出发区。 项目2 创新创意赛 根据是否使用面包板分为标准平台组和无差别组,其中标准平台组作品必须使用至少一块面包板且可进行现场插线操作。
参赛队在不破坏场地并在场地范围内,可充分利用场地,自主选择场景、机器人等,进行创新创意演示。 可添加一定的辅助器件。 3、比赛规则 规则一比赛场地
规则1.1 尺寸 比赛场地为正方形 规则1.2 场地区域及标识 比赛场地用直线、圆及数字进行标识。详见图1、图2、图3。
图1 场地立体示意图
图2 场地平面示意图(带安全边界) 图3 机器人出发区 规则二比赛用料块 使用5个直径为40、高度为40的料块,颜色分别为黄色、白色、红色、黑色、蓝色。