飞行管理与自动飞行控制系统
飞行控制系统简介
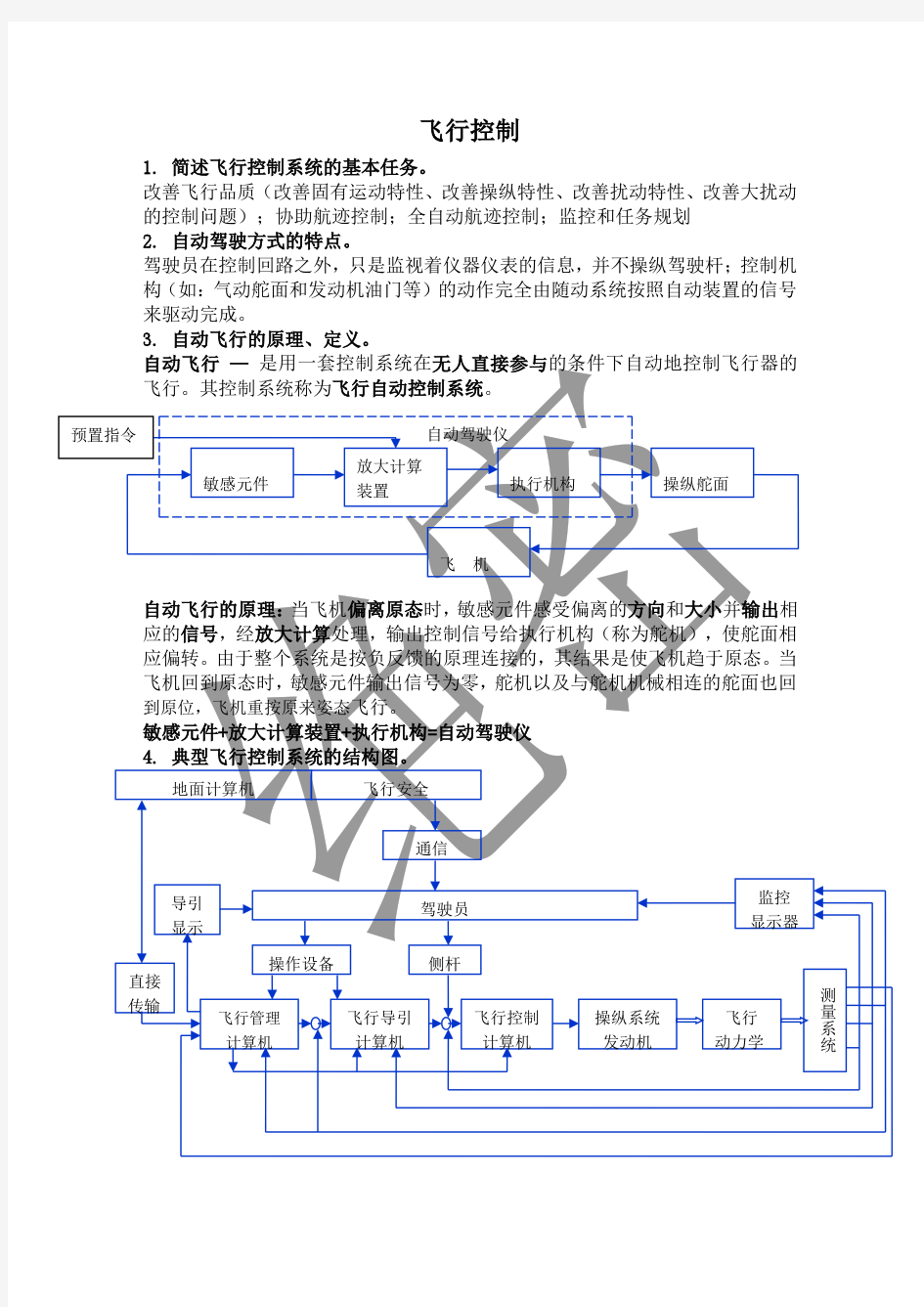
自动飞行控制系统 飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。 深圳市瑞伯达科技有限公司,致力于成为全球无人机飞行器领导品牌,是智能化无人机飞行器及控制系统的研制开发的专业厂商,生产并提供各行业无人机应用的解决方案。产品线涵盖各种尺寸多旋翼飞行器、专业航拍飞行器、无人机飞行控制系统、无人机地面站控制系统、高清远距离数字图像传输系统、专业级无线遥控器、高精飞行器控制模块及各类飞行器配件 飞行器的自动飞行一、问题的提出早在重于空气的飞行器问世时,就有了实现自动控制飞行的设想。1891年海诺姆.马克西姆设计和建造的飞行器上安装了用于改善飞行器纵向稳定性的飞行系统。该系统中用陀螺提供反馈信号,用伺服作动器偏转升降舵。这个设想在基本概念和手段上与现代飞行自动控制系统有惊人的相似,但由于飞机在试飞中失事而未能成为现实。 60年代飞机设计的新思想产生了,即在设计飞机的开始就考虑自动控制系统的作用。基于这种设计思想的飞机称为随控布局飞行器(Control Configured Vehicle 简称CCV)。这种飞机有更多的控制面,这些控制面协同偏转可完成一般飞机难以实现的飞行任务,达到较高的飞行性能。 飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。最简单的人工飞行控制系统就是机械操纵系统。不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。自动驾驶仪是最基本的自动飞行控制系统。飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。信息传输链用于系统各部件之间传输信息。常用的传输链有电缆、光缆和数据总线。接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。 自动飞行控制系统由自动驾驶仪、自动油门杆系统、自动导航系统、自动进场系统和自动着陆系统、自动地形跟随/回避系统构成。 RIBOLD瑞伯达科技有限公司,致力于成为全球飞行影像系统独家先驱,其产品线涵盖无人机飞行控制系统及地面站控制系统、影视航拍飞行平台、商用云台系统、高清远距离数字图像传输系统、无线遥控和成像终端及模型飞行器产品,多旋翼飞行器和高精控制模块。 RBD瑞伯达坚持创新, 以技术和产品为核心,通过完美的产品带来前所未有的飞行体验。我们的目标是做世界一流的无人机企业,为我们的客户提供一流的产品和服务!
空中交通管制知识
空中交通管制知识 对航空器的空中活动进行管理和控制的业务,包括空中交通管制业务、飞行情报和告警业务。它的任务是;防止航空器相撞,防止机场及其附近空域内的航空器同障碍 物相撞;维护空中交通秩序,保障空中交通畅通,保证飞行安全和提高飞行效率。 空中交通管制的由来 航空器飞行限制因素影响和制约航空器飞行的各种因素。包括: 1.航空器性能的限制:不同型号的飞机有不同的商务载重、起降条件、巡航时速等。50年代以前的客机不能飞往西藏高原,而当代则有多型飞机能在高原机场起降。 2.气象条件的限制:不同型的航空器有不同的飞行气象标准,绝对的“全大候飞机”是不存在的。 3.不同性质的飞行任务的限制:运输机要求在相对固定的高度层飞行,且不同型的飞机有不同的最佳飞行高度层。农业飞机喷洒农药时要求在低空飞行,一般情况下飞得越低喷洒效果越好。 4.时间的限制:为了防止飞机在天空出现危险接近或相撞,既要在空间垂直方向和水平方向保持高度差和距离,同时在时间上要合理调配次序,拉开时间间隔。5.地理环境的限制:如山峰、高压电塔、电视塔等突出物都对飞行有影响,飞行规则对此有种种限制。还有,重要城市市区、军事要地空域不准飞入,列为“空中禁区”。 6.地面保障设施的限制:为安全可靠地完成飞行任务,地面保障设施有:通信和导航、雷达、气象、航行指挥、搜索和救援等,一旦这些设备不完备或出现故障.对飞行活动的限制就趋多。 7地面对空活动的限制:如对空射击靶场有活动的地区空域,禁止飞机飞入。 总之,航空器是在有限的空间、有限的时间和有限的条件下起飞、降落和飞行的、由于航空器的飞行受诸多因素的限制和影响,人们通过实践以及飞行事故的痛苦教训,逐步形成了一套管理空中飞行的规章制度和组织,即空中交通管制。 管制方法 主要有两种:程序管制、雷达管制 l.程序管制 程序管制方式对设备的要求较低,不需要相应监视设备的支持,其主要的设备环境是地空通话设备。管制员在工作时,通过飞行员的位置报告分析、了解飞机间的位置关系,推断空中交通状况及变化趋势,同时向飞机发布放行许可,指挥飞机飞行。 航空器起飞前,机长必须将飞行计划呈交给报告室,经批准后方可实施。飞行计划内容包括飞行航路(航线)、使用的导航台、预计飞越各点的时间、携带油量和备降机场等。空中交通管制员根据批准的飞行计划的内容填写在飞行进程单
飞行控制系统
飞行控制系统 为了使无人机飞行控制系统具有强大的数据处理能力、较低的功耗、较强的灵活性和更高的集成度,提出了一种以SmartFusion为核心的无人机飞行控制系统解决方案。为满足飞控系统实时性和稳定性的要求,系统采用了μC/OS-Ⅱ实时操作系统。与传统的无人机飞行控制系统相比,在具有很强的数据处理能力的同时拥有较小的体积和较低的功耗。多次飞行证明,各个模块设计合理,整个系统运行稳定,可以用作下一代无人机高性能应用平台。 关键词:无人机;飞行控制系统;SmartFusion芯片;μC/OS-Ⅱ 0 引言 飞行控制系统是无人机的重要组成部分,是飞行控制算法的运行平台,它的性能好坏直接关系着无人机能否安全可靠的飞行。随着航空技术的发展,无人机飞行控制系统正向着多功能、高精度、小型化、可复用的方向发展。高精度要求无人机控制系统的精度高,稳定性好,能够适应复杂的外界环境,因此控制算法比较复杂,计算速度快,精度高;小型化则对控制系统的重量和体积提出了更高的要求,要求控制系统的性能越高越好,体积越小越好。此外,无人机飞行控制系统还要具有实时、可靠、低成本和低功耗的特点。基于以上考虑,本文从实际工程应用出发,设计了一种基于SmartFusion的无人机飞行控制系统。 1 飞控系统总体设计
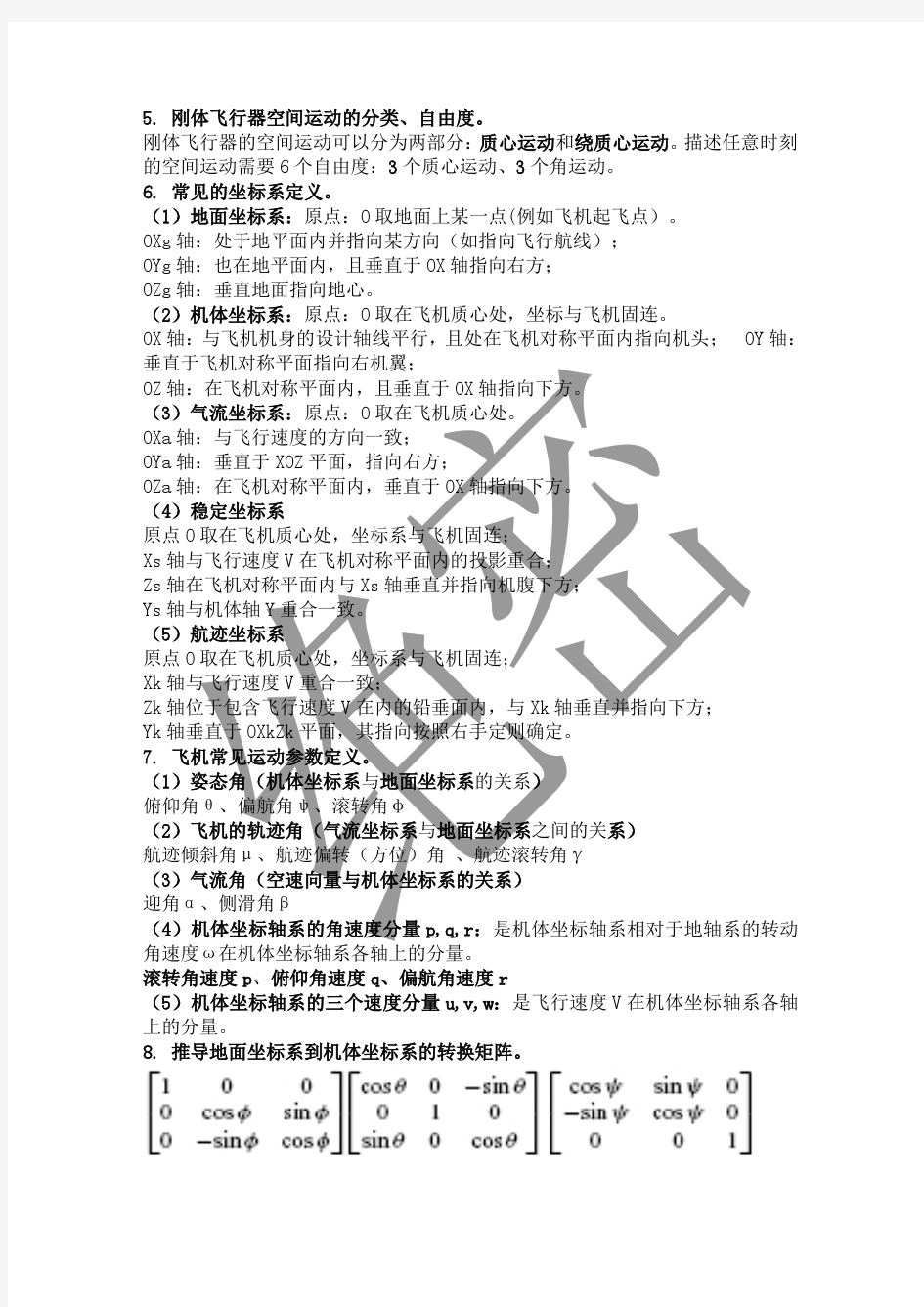
飞行控制系统在无人机上的功能主要有两个:一是飞行控制,即无人机在空中保持飞机姿态与航迹的稳定,以及按地面无线电遥控指令或者预先设定好的高度、航线、航向、姿态角等改变飞机姿态与航迹,保证飞机的稳定飞行,这就是通常所谓的自动驾驶;二是飞行管理,即完成飞行状态参数采集、导航计算、遥测数据传送、故障诊断处理、应急情况处理、任务设备的控制与管理等工作。 飞行控制系统主要完成3个功能任务,其层次构成为三层:最底层的任务是提高无人机运动和突风减缓的固有阻尼——三个轴方向的阻尼器功能;第2层的任务是稳定无人机的姿态角——基本驾驶仪的功能(主要进行角运动控制);第3层的任务是控制飞行高度、航迹和飞行速度,实现较高级自动驾驶功能。飞行控制系统原理框图见图1。 由上述分析易知,飞行控制系统主要由飞行控制器、传感器(或敏感元件)、舵机3部分组成。无人机飞行控制系统的基本架构如图2所示。
塔台管制工作程序
塔台管制指挥岗位工作程序 1接班 1.1了解天气、航行通告和航班计划。 1.2了解相邻管制单位的移交协调规定、流量限制和军航管制部门对本区域的限制等。 1.3检查管制设备运行情况,发现问题立即报告带班及技术保障部门。 1.4核查、掌握飞行动态。 1.5按飞行情报报告室交接班检查单进行工作交接,经双方确认检查单后完成交接。 1.6接班注意事项及时在值班记录本上登记。 2组织指挥 2.1合理调配航空器之间的间隔。 2.2对被授权指挥的军方运输机实行管制。 2.3对管制区内执行通用飞行任务的航空器动态实施有效监控。 2.4准确发布上升、下降、起飞、着陆等管制指令。 2.5正确使用飞行进程单。 2.6用语规范,指令明确,严格陆空通信程序。 2.7正确操作自动化系统的人机界面。 2.8按规定和协议要求实施管制协调和移交。 2.9军航活动时,按军航要求实施调配和控制。 2.10本场海军飞行时,对管制协调移交、申请放行许可,加强和站调协调。2.11发生特殊情况时按相应工作程序进行处置。 3交班 3.1交接班双方以交接班检查单为依据,逐条进行交接检查。 3.2必要时协助接班管制员实施管制指挥。 3.3交接班过程重叠十分钟或以上。 3.4接班管制员完全掌握交接班情况后方可离岗。 3.5交班注意事项及时在值班记录本上登记。
塔台管制监控协调岗位工作程序 1接班 1.1查看工作日志,了解天气、航行通告和航班计划。 1.2了解相邻管制的移交协调规定、流量限制和军航管制部门对本区域的限制等。 1.3检查管制设备运行是否正常,发现问题立即报告带班及技术保障部门。 1.4核查、掌握飞行动态。 1.5 按飞行情报报告室交接班检查单进行工作交接,经双方确认检查单后完成交接。 2实施监控 2.1监控飞行进程单填写情况,并以此为依据掌握管制指挥岗位的指挥预案。 2.2监听无线电通信,当发现管制指挥岗位指令错误或机组复诵有误时,及时提醒并纠正。 2.3当备份波道有飞行活动时,与管制指挥岗位管制员协同后,实施对该飞行的管制指挥。 2.4协助管制指挥岗位监视机组执行指令的情况,发现问题及时提醒。 2.5观察辖区内潜在飞行冲突,并且及时以适当的方式提醒管制指挥岗位。 2.6发生特殊情况时,协助管制指挥岗位按相应的工作程序进行处置。 2.7协助管制指挥岗位处置设备故障。 2.8负责与相邻管制单位或岗位的协调与移交。 2.9负责通报飞行不正常情况、设备故障情况和其他安全信息,并做好记录。 2.10需要时,向有关单位通报航空器起飞、着陆、备降、返航动态。 2.11负责了解气象和情报信息并向塔台管制指挥岗位通报。 2.12在天气恶劣时协助管制指挥岗位工作。 2.13按照管制指挥岗位的要求进行特殊管制移交和协调。 2.14本场海军飞行时,协助指挥席与部队正指挥员进行指挥协调,向站调通报管制移交和协调意图。 3交班 3.1交接班双方以相应的“检查单”为依据,逐条进行交接检查;
飞行器自动控制导论_第六章
第六章 典型飞行自动控制系统的工作原理 概述 6.1.1典型飞行自动控制系统的组成 描述飞机运动的参数有三个姿态角(θ、ψ、φ)、两个气流角(α、β)、两个线位移(H 、Y )及一个线速度(V )。飞行控制的作用,就是应用负反馈控制原理对上述参数的部分或全部进行控制。有时也根据需要也可控制与速度V 和迎角α有关的马赫数M 及法向过载。实际上飞行自动控制就是按一定飞行控制律,输出三个舵偏角(e δ、r δ及a δ)及油门T δ对飞行器实现闭环控制。 典型飞行自动控制系统一般包括三个反馈回路:舵回路、稳定回路和控制(制导)回路。 舵回路通常是一个随动系统(或称为伺服系统),一般包括舵机、反馈部件和放大器,如图所示。舵回路中的舵机作为执行机构带动舵面偏转。 图 舵回路方框图 舵回路中有两个反馈回路:位置反馈回路,使控制信号与舵机输出信号成比例关系,速度反馈回路,增加舵回路阻尼,改善舵回路的动态性能。 如果敏感部件是测量飞机的姿态,测量敏感部件、放大计算装置与舵回路构成自动驾驶仪,自动驾驶仪和飞机构成了飞行器的稳定回路,主要起稳定和控制飞机的姿态的作用。典型的稳定回路如图所示。
图稳定回路 由稳定回路和飞机重心位置测量部件以及描述飞机空间几何关系的运动环节,组成更大的回路,称为控制(或称制导回路),如图6-3所示。主要起稳定和控制飞机的运动轨迹的作用。 图控制(或制导)回路 6.1.2 纵向控制 飞行器纵向扰动运动,一般由短周期模态运动和长周期模态运动组成。随着飞行器的速度越来越快,飞行高度越来越高,飞行包线范围扩大,欲使飞行器在整个包线范围内满足飞行品质要求,普遍采用反馈控制技术。例如高空飞行时,飞行器的阻尼特性常常变差,短周期模态特性趋于恶化,造成操纵反应过程中超调量过大,振荡加剧,严重影响飞行任务的完成,此时,可以在纵向通道引入适当的反馈可以改善飞行品质。又如当飞行器要完成保持姿态角或等速V飞行时,即使飞行器具有良好的短周期模态时,但由于长周期模态振荡频率较低,衰减较慢,甚至是慢发散的。要实现上述任务时,要求驾驶员经常操纵舵面加以控制,并且过程很长。为了减轻驾驶员负担,精确地完成上述任务,需要抑制沉浮运动,同样可以引入适当反馈信号达到目的。如要完成定高飞行,除了使飞行具有良好短周期模态和长周期模态外,还可以引入高度反馈,完全脱离驾驶员操纵实现保
民用航空机场塔台空中交通管制设备配置
民用航空机场xx空中交通管制设备配置1范围 本标准规定了民用航空机场塔台空中交通管制(以下简称空管)设备的配置要求。 本标准适用于各类民用航空机场塔台的空管设备配置。 2xx空管设备配置的类别 2.1塔台空管设备配置的类别根据该塔台所在机场平均起降架次进行划分,见表 1。" 2.2日平均起降加次是指现有统计的年实际起降架次的日平均值,对新、扩建塔台,应该是指预计五年内达到的最多起了降架次,或者应与机场总的要求一致。 3配置原则 3.1塔台设备配置,应根据空管的需要,并考虑机场运行量的发展规模,做到保障安全,方便使用。 3.2本标准规定为塔台空管设备的必需配置,设备的冗余备分各增加可根据需要考虑。 4xx管制室和设备室的一般要求 4.1塔台管制是实施塔台飞行管制的工作场所,塔台设备室是安置塔台有关空管设备的机房,二者可以合二为一,也可以根据需要分开。 4.2机场内外的照明设备、反光装置和其他设施不应影响塔台管制员的观察,应尽量避免飞机滑行、起降时的噪音对塔台管制室工作环境的影响。0
4.3塔台管制室四周的玻璃窗应向外倾斜15左右,以避免对停机坪、跑道、滑行道和起降地带产生眩光,塔台外廊地面应低于塔台管制室地面1m以上,便于管制员向下、向外观察,管制室的水平视解应为3600。 4.4塔台的位置应保证塔台管制员能看到全部跑道和滑行道。 4.5塔台管制室四周的大玻璃分格不应妨碍管制员坐、立时的观察视线。 4.6塔台管制室内应保持适当温度,以免四周玻璃上形成水汽或霜;北方机场的塔台管制室应采用双层玻璃,双层玻璃之间不应结露。 4.7玻璃窗应配备特殊有色玻璃或能透视的遮阳窗帘。 4.8xx玻璃窗下端跟地板不应超过 0."7m。 4.9塔台屋顶支柱应采用最小的尽寸、最少的数目,支柱的位置不应影响管制员的主要观察方位。 4.10塔台的屋顶应设置障灯,塔台应设备避雷系统。 4.11设备室应根据有关规定和设备工艺要求进行设计,并配备必要的空调和不间断电源等设备。 4.12塔台管制室应采用与本机场管制部门统一的时钟系统。 4.13xx管理室的环境要求见附录 A、附录 B、附录C(标准的附录)。 5xx席位的功能及设备配置 5.1塔台席位可以分为塔台管制席、助理管制席、飞行数据处理和放行许可席、地面管制席、通报协调席和主任管制席。每个席位对应一个控制台。
民航知识空中交通管制
民航知识空中交通管制 对航空器的空中活动进行管理和控制的业务,包括空中交通管制业务、飞行情报和告警业务。它的任务是;防止航空器相撞,防止机场及其附近空域内的航空器同障碍物相撞;维护空中交通秩序,保障空中交通畅通,保证飞行安全和提高飞行效率。 空中交通管制的由来 航空器飞行限制因素影响和制约航空器飞行的各种因素。包括: 1.航空器性能的限制:不同型号的飞机有不同的商务载重、起降条件、巡航时速等。50年代以前的客机不能飞往西藏高原,而当代则有多型飞机能在高原机场起降。 2.气象条件的限制:不同型的航空器有不同的飞行气象标准,绝对的"全大候飞机"是不存在的。 3.不同性质的飞行任务的限制:运输机要求在相对固定的高度层飞行,且不同型的飞机有不同的最佳飞行高度层。农业飞机喷洒农药时要求在低空飞行,一般情况下飞得越低喷洒效果越好。 4.时间的限制:为了防止飞机在天空出现危险接近或相撞,既要在空间垂直方向和水平方向保持高度差和距离,同时在时间上要合理调配次序,拉开时间间隔。 5.地理环境的限制:如山峰、高压电塔、电视塔等突出物都对飞行有影响,飞行规则对此有种种限制。还有,重要城市市区、军事要地空域不准飞入,列为"空中禁区"。 6.地面保障设施的限制:为安全可靠地完成飞行任务,地面保障设施有:通信和导航、雷达、气象、航行指挥、搜索和救援等,一旦这些设备不完备或出现故障.对飞行活动的限制就趋多。 7地面对空活动的限制:如对空射击靶场有活动的地区空域,禁止飞机飞入。 总之,航空器是在有限的空间、有限的时间和有限的条件下起飞、降落和飞行的、由于航空器的飞行受诸多因素的限制和影响,人们通过实践以及飞行事故的痛苦教训,逐步形成了一套管理空中飞行的规章制度和组织,即空中交通管制。
飞行器自动控制导论_第一章飞行控制系统概述
第一章飞行控制系统概述 1.1飞行器自动控制 1.1.1飞行控制系统的功能 随着飞行任务的不断复杂化,对飞机性能的要求越来越高,不仅要求飞行距离远(例如运输机),高度高(高空侦察机),而且还要求飞机有良好的机动性(例如战斗机)。为了减轻驾驶员在长途飞行中的疲劳,或使驾驶员集中精力战斗,希望用自动控制系统代替驾驶员控制飞行,并能改善飞机的飞行性能。这种系统就是现代飞机上安装的飞行自动控制系统。 飞行控制系统的功能归结起来有两点:1)实现飞机的自动飞行;2)改善飞机的飞行性能。 飞机的自动飞行控制系统在无人参与的情况下,自动操纵飞机按规定的姿态和航迹飞行,通常可实现对飞机的三轴姿态角和飞机三个方向的空间位置的自动控制与稳定。例如,无人驾驶飞行器(如无人机或导弹等),实现完全的飞行自动控制;对于有人驾驶的飞机(如民用客机或军用飞机),虽然有人参与驾驶,但某些飞行阶段(如巡航段),驾驶员可以不直接参与操纵,而由飞行控制系统实现对飞机飞行的自动控制,但驾驶员应完成对自动飞行指令的设置和监督自动飞行的情况,并可以随时切断自动控制而实现人工驾驶。采用自动飞行具有以下优点: 1)长距离飞行时解除驾驶员的疲劳,减轻驾驶员的工作负担; 2)在一些恶劣天气或复杂的环境下,驾驶员难于精确控制飞机的姿态和航迹,自动飞行控制系统可以精确对飞机姿态和航迹的精确控制; 3)有一些飞行操纵任务,驾驶员难于精确完成,如进场着陆,采用自动飞行控制则可以较好地完成任务。 一般来说,飞机的性能和飞行品质是由飞机本身气动特性和发动机特性决定的,但随着飞机飞行高度及飞行速度的增加,飞机的自身特性将会变坏。如飞机在高空飞行时,由于空气稀薄,飞机的阻尼特性变坏,致使飞机角运动产生严重的摆动,靠驾驶员人工操纵将会很困难。此外,设计飞机时,为了减小质量和阻力,提高有用升力,将飞机设计成静不稳定的。对于这种静不稳定的飞机,驾驶员是难于操纵的。在飞机上采用增稳系统或阻尼系统可以很好地解决这些问题。
飞行进程单
飞行进程单 MH 4011-2001 1 范围 本标准规定了用于民用航空空中交通管制服务的飞行进程单格式和填写内容。 本标准适用于民用航空空中交通管制服务单位、空中交通管制员和空中交通管制设备的提供者。 2引用标准 下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。本标准出版时,所示版本均为有效。所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。 国际民用航空组织第8643号文件《航空器机型代码汇编》 3定义和缩略语 3.1 定义 本标准采用下列定义。 3·1·1飞行进程单flight progress strip 记录接受空中交通管制服务的航空器的信息和运行状态的记录条。 3.1.2进近管制服务approach control service 对进场或离场受管制的飞行提供空中交通管制的服务。 3.1.3区域管制服务area control service 对管制区内受管制的飞行提供空中交通管制的服务。 3.1.4塔台管制服务tower control service 对机场交通提供空中交通管制的服务。 3.1.5终端管制区terminal control area 设在一个或几个主要机场附近的空中交通服务航路汇合处的管制区。 3.1.6飞行高度层flight level 以1013.2 hPa气压面为基准的等压面。各等压面之间具有规定的等压差。 3.1.7巡航高度层cruising level 飞行的大部分时间所保持的高度层。 3.1.8位置报告点fix
用目视参考地面、无线电导航设施、卫星导航设施或其他方法所确定的地理位置。 3.1.9管制移交点transfer of control point 沿航空器飞行航径上规定的一个点,在该点对航空器提供空中交通管制服务的责任由一个单位或席位,移交给下一个管制单位或席位。 3.2缩略语 本标准采用下列缩略语。 3·2·1 ADS 自动相关监视(automatic dependent surveillance) 3·2·2 ATIS 终端自动情报服务(automatic terminal information service) 3.2.3 CDA连续进近(continuous descent approach) 3.2.4 EST预计飞越边界电报(boundary estimate message) 3.2.5 ILS仪表着陆系统(instrument landing system) 3.2.6 LOC航向信标(10calizer) 3.2.7 NDB 无方向性信标(non-directional beacon) 3.2.8 PAR精密进近雷达(precision approach radar) 3.2.9 SID标准仪表离场(standard instrument departure) 3.2.10 STAR标准终端进场(standard terminal arrival) 3.2.11 VFR目视飞行规则(visual flight rules) 3.2.12 VHF甚高频(very high frequency) 3.2.13 VOR甚高频全向信标(VHF omnidirectional range) 3.2.14 UTC世界协调时(universal time coordination) 4 总则 4.1 飞行进程单的作用在于帮助空中交通管制员 a)掌握航空器的航行信息: b),掌握航空器的运行状态; c)预测航空器之间的飞行冲突、调配空中活动; d)记录管制工作过程; e)存储管制指令,为分析管制工作提供实际数据; f)进行管制协调和移交。 4.2塔台、进近及区域空中交通管制单位应使用飞行进程单。航空器进入管制区域前,空中交通管制单位应填写好记录有该航空器信息的飞行进程单。航空器在飞行过程中,管制员
自动飞行控制系统的设计技术
自动飞行控制系统的设计技术 摘要以某具体型号自动飞行控制系统为例,在对自动飞行控制系统的基本原理技能型论述的基础上,对系统设计过程中存在的典型故障以及解决故障的相关技术进行了论述和分析,给自动飞行控制系统设计工作提供参考。 关键词自动飞行;飞控系统;设计 1 自动飞行控制系统的构成与原理 1.1 系统的基本构成 1.2 系统原理 1)自动驾驶实现的原理 飞行控制系统主要包括三个基本回路,其中:导航回路,用以实现对飞机飞行轨迹的控制,又被称作为外回路;驾驶仪回路,主要用于确保系统的稳定性,确保对系统控制时具有稳定性特征,一般还被称作为内回路;伺服网路,该回路是控制命令的执行机构,确保控制系统的控制命令得以可靠执行,又被称作舵回路;驾驶仪回路,该回路是具有独立功能的分系统,不但能够保持飞机员设定的飞行姿态稳定飞行,同时还可以实现透明驾驶、比普配平等功能。 在启动自动驾驶设备之后,自动驾驶计算机中的存储设备将对飞机的即时飞行状态进行记忆,并将之作为基准值。而飞机上各个部位设置的传感设备将探测得到飞机此时的姿态信息,并将这些信息实时的传递到自动驾驶设备的计算机当中。在和计算机设备中存储的基准值对比之后,对与基准值不符的相关数据通过发出飞行指令进行调整,从而达到控制飞行的目的。驾驶设备在工作过程中总需要保持控制系统处于完全平衡的状态,利用对飞机飞行姿态的控制达到是飞行误差为零的目的,或者是尽量使得飞行姿态稳定在一个相对稳定的基准值附近。 在飞行系统实现自动控制的过程中,传递函数f=B/(E—S)通常被称作是自动驾驶设备的控制律,系统的所有的控制指令都是基于这个控制规则发出的。根据PID控制理论,这个控制规则主要包括与偏差变化率相关的导数项、比例项和偏差积分项等几个部分构成。其中,比例项是控制规则的主要控制项,当飞机在飞行过程中若由于其他原因导致其偏离基准值过远时,飞行驾驶控制系统的计算机将发出与误差成对应比例的飞行姿态调整指令。但是,考虑到信号传递延迟以及飞机飞行过程中的惯性作用,飞机执行机构在响应指令时刻的飞行姿态已经发生了对应的变化,这将导致飞行姿态控制命令存在对应误差。所以,为了控制这种变化,系统控制规则中的导数项,则是通过增加系统的阻尼的方式,对飞机的飞行姿态进行调节,控制飞行姿态调节过程中的调节质量。所以,在实际的飞行控制系统设计过程中,为了避免出现飞行姿态变化过大、控制常值扰动等问题,通常在系统设计过程中引入一个对应的积分电路,通过其驱动与之并联的舵
飞行控制系统功能介绍
飞行控制系统功能介绍
目录 一、综述 (1) 二、飞控的相关系统说明 (1) 1.飞控的基本子系统 (2) 1.1航向控制系统 (2) 1.2速度控制系统 (3) 1.3高度控制系统 (4) 1.4自动着陆系统 (5) 2.测试机飞控所需的子系统 (6) 2.1GPS系统 (7) 2.2传感器、温湿度传感器系统 (8) 2.3飞行器自动稳定控制系统 (11) 2.4航向偏离控制系统 (11) 2.5显示系统 (12) 2.6信号反馈控制系统 (12) 2.7自动飞行控制系统 (13) 2.8自动导航系统 (14) 3.测试机飞控所需扩充系统功能 (15) 3.1自动避障系统 (15) 3.2语音播报系统 (17) 3.3物联网系统 (17) 3.4摄录系统 (18) 4.测试机飞控的其他功能 (18) 4.1自动寻路控制系统 (18) 4.2自动跟踪系统 (19) 4.3一键返航系统 (19) 4.4双飞控系统 (19) 4.5降落伞系统 (19) 5.飞行控制系统的常用外设接口 (20)
一、综述 本设计调研依据飞行控制系统(以下简称“飞控”)功能进行的系统调研。本飞行控制系统删减了翻滚、特技系统功能;以此对飞控系统的相关系统功能进行功能收集,由于本人的资料有一大部分是网络收集,会造成信息描述不准,还请大家见谅!。 飞控系统的相关子系统描述如下图1: 图1 二、飞控的相关系统说明 飞控系统的子系统功能分类方式有很多种,可以按飞控系统的子系统功能分类,按飞控系统涉及的子系统关联关系分类,按飞控系统设计的子系统基本功能和选配功能分类等等,本文现阶段以调研飞控系统功能为主,故选择按飞控系统的系统功能分类为主。
飞行器自动控制导论_第六章
第六章 典型飞行自动控制系统的工作原理 6.1 概述 6.1.1典型飞行自动控制系统的组成 描述飞机运动的参数有三个姿态角(θ、ψ、φ)、两个气流角(α、β)、两个线位移(H 、Y )及一个线速度(V )。飞行控制的作用,就是应用负反馈控制原理对上述参数的部分或全部进行控制。有时也根据需要也可控制与速度V 和迎角α有关的马赫数M 及法向过载。实际上飞行自动控制就是按一定飞行控制律,输出三个舵偏角(e δ、r δ及a δ)及油门T δ对飞行器实现闭环控制。 典型飞行自动控制系统一般包括三个反馈回路:舵回路、稳定回路和控制(制导)回路。 舵回路通常是一个随动系统(或称为伺服系统),一般包括舵机、反馈部件和放大器,如图6.1-1所示。舵回路中的舵机作为执行机构带动舵面偏转。 图6.1-1 舵回路方框图 舵回路中有两个反馈回路:位置反馈回路,使控制信号与舵机输出信号成比例关系,速度反馈回路,增加舵回路阻尼,改善舵回路的动态性能。 如果敏感部件是测量飞机的姿态,测量敏感部件、放大计算装置与舵回路构成自动驾驶仪,自动驾驶仪和飞机构成了飞行器的稳定回路,主要起稳定和控制飞机的姿态的作用。典型的稳定回路如图6.1-2所示。
图6.1-2 稳定回路 由稳定回路和飞机重心位置测量部件以及描述飞机空间几何关系的运动环节,组成更大的回路,称为控制(或称制导回路),如图6-3所示。主要起稳定和控制飞机的运动轨迹的作用。 图6.1-3 控制(或制导)回路 6.1.2 纵向控制 飞行器纵向扰动运动,一般由短周期模态运动和长周期模态运动组成。随着飞行器的速度越来越快,飞行高度越来越高,飞行包线围扩大,欲使飞行器在整个包线围满足飞行品质要求,普遍采用反馈控制技术。例如高空飞行时,飞行器的阻尼特性常常变差,短周期模态特性趋于恶化,造成操纵反应过程中超调量过大,振荡加剧,严重影响飞行任务的完成,此时,可以在纵向通道引入适当的反馈可以改善飞行品质。又如当飞行器要完成保持姿态角或等速V飞行时,即使飞行器具有良好的短周期模态时,但由于长周期模态振荡频率较低,衰减较慢,甚至是慢发散的。要实现上述任务时,要求驾驶员经常操纵舵面加以控制,并且过程很长。为了减轻驾驶员负担,精确地完成上述任务,需要抑制沉浮运动,同样可以引入适当反馈信号达到目的。如要完成定高飞行,除了使飞行具有良好短周期模态和长周期模态外,还可以引入高度反馈,完全脱离驾驶员操纵实现保持
西工大飞行控制系统总复习
总复习 第一章 飞行动力学 一、概念: 1、体轴系纵轴ox 在飞机对称平面内;速度轴系纵轴a ox 不一定在飞机对称平面内;稳定轴系纵轴ox 在飞机对称平面内,与体轴系纵轴ox 相差一个配平迎角0α。 2、俯仰角θ的测量轴为地轴系横轴g oy ;滚转角φ(倾斜角)的测量轴为体轴系纵轴ox ;偏航角ψ的测量轴为地轴系铅锤轴g oz 。 3、迎角α:空速向量在飞机对称平面内投影与机体纵轴ox 夹角。 以的投影在ox 轴之下为正。 4、β(侧滑角):空速向量v 与飞机对称平面的夹角。以v 处于对称面右为正。 5、坐标系间的关系 机体轴系b S 与地轴系g S 之间的关系描述为飞机姿态角(ψφθ、、); 速度轴系a S 与机体轴系b S 之间的关系描述为气流角(βα、); 速度轴系a S 与地轴系g S 之间的关系描述为航迹角(χμγ、、)。 6、舵偏角符号 升降舵偏角e δ:平尾后缘下偏为正0>e δ,产生低头力矩。0 学习情景1 课程导论 1.飞行控制系统发展概述 自动飞行控制系统已有100多年的研制历史,早在有人驾驶飞机出现之前,自动飞行装置即已出现。 1.1方向稳定器 1873年,法国雷纳德(C.C.Renard)无人多翼滑翔机的方向稳定器。 1.2 电动陀螺稳定装置-姿态稳定 1914年,美国的爱莫尔·斯派雷(Eimer Sperry)研制成功第一台可以保持飞机稳定平飞的电动陀螺稳定装置,该装置利用陀螺的稳定性和进动性,建立一个测量基准,用来测量飞机的姿态,它和飞机的控制装置连在一起,一旦飞机偏离指定的状态,这个机构就通过飞机的控制装置操纵飞机的舵面偏转使飞机恢复到原来的状态。 1.3 自动驾驶仪 20世纪30年代出现了可以控制和保持飞机高度、速度和航迹的自动驾驶仪。 第二次世界大战促使自动驾驶仪等设备得到进一步发展,由过去气动-液压到全电动,由三个陀螺分别控制三个通道改用一个 或两个陀螺来操纵飞机,并可作机动、爬高及自动保持高度等。 二次大战期间,美国和原苏联相继研制出功能较完善的电气式自动驾驶仪C-1和其仿制品A∏-5; 德国在二战后期研制成功飞航式导弹V-1和弹道式导弹V-2, 更进一步促进了飞行自动控制装置的研制和发展。 20世纪50年代后,和导航系统、仪表着陆系统相联,自动驾驶装置实现了长距离自动飞行和自动着陆。 1.4 自动飞行控制系统 1947年成功突破音障后,飞机的飞行包线(飞行速度和高度的变化范围)扩大,越来越复杂的飞行任务对飞机性能的要求也越来越高,仅靠气动布局和发动机设计所获得的飞机性能已经很难满足复杂飞行任务的要求。因此,借助于自动控制技术来改善飞机稳定性的飞行自动控制装置(如增稳系统)相继问世,在此基础上,自动驾驶仪的功能得到进一步的扩展,发展成为自动飞行控制系统(AFCS)。 20世纪60年代,产生了随控布局飞行器(congtrol configured vehicle--CCV)的设计思想。 20世纪60年代前的以模拟电路或模拟计算机为主要计算装置的飞行控制系统,逐渐发展成为现在已普遍应用的数字式飞行控制系统,这也为新技术应用和更复杂更完善系统的综合提供了实现的可能性。例如: 主动控制技术(active control technology—ACT); 余度技术 容错控制技术 20世纪80年代得到迅速发展的火/推/飞综合控制系统等。 20世纪70年代中期,由于计算机的应用使自动驾驶仪和飞机的指引系统组成一个综合系统,使飞机的各种传感器数据、指 包头塔台飞行进程单专项考试题 一、填空(每空1分,共30分) 1、航空器在飞行过程中,管制员应把通过各种渠道收到的____________(该航空器动态)、____________(管理指令)及有关内容及时、准确地记入相应的飞行进程单. 2、值班管制员应按有关规定填写飞行进程单.飞行进程单记录的内容不应_________(任意涂改)。 3、为确保在任何时刻能反映该航空器完整的运行和管制工作状态,飞行进程单应以_________(手工)方式进行更新。 4、不同类型的飞行进程中应通过颜色加以区别.飞行进程单以红、___黄、蓝、___黑色加以区分.______红色表示飞入管制区,______蓝色表示飞出管制区,______黄色表示飞越管制区,______黑色表示除三种治况外的其他情况. 5、飞行进程中应妥善保存.以备查检,保有期为_________(1个月)。 6、填写飞行进程单时,当有关栏目不需要填写时,应空出。使用符号时,应按规定的符号填写。各项不应涂改,若需更改,在原内容中间____________划一根线,再在旁边空白地方填上正确的内容,以保持原始记录。 7、所有的时刻应采用_______________世界协调时,用连续四位数字表示。前两位表示______小时,后两位表示______分,不足两位。在填写位置报告点时刻时,第一个位置报告点应填写小时,其后的位置报告点可省略小时,但跨小时时,位置报告点应填小时。 8、高度数据以米为单位。具体表示方法如下; a)用以标准海平面气压为基准的高度表示时,以______10 m为单位.直接用四位数字表示,不足四位,前面以“0”填充,即9 600 m记作“______0960”;b)用以修正海平面气压为基准的高度表示时,以______10 m为单位,以字母“______A”打头,后按三位数字,不足三位,前观以“0”填充,即900m记作“______A090”; c)用以场面气压为基准的高度表示时,以 ______10 m为单位,以字母“H”打头,后按三位数字,不足三位,前面以“0”填充,即900 m记作“______H090”。 9、飞行进程单对分为________区域飞行进程单、________进近飞行进程单、________塔台飞行进程单、________进近塔台飞行进程单。 10、飞行进程单由以下四个区域构成: a)____________标牌区;记录航空器呼号、机型、二次雷达编码等航空器特征方面的内容和信息的区域; b)____________指令区:记录发布指令及执行情况的区域; c)____________航路区:记录飞行航路和位置报告点及相关内容的区域; d)____________协调区:记录日期、移交、扇区标识等协调及其他内容的区域。 二、简略语及常用符号含义(每空1分,共20分) 1、解释飞行进程单中使用的常用简略语的含义: APCH _______________进近(approach) C _______________可以(cleared) EAT _______________预计进近时刻(estimated approach time) ETO _______________预计飞越时间(estimated over) 第16章飞行管理系统 16.1飞行管理系统概述 随着飞机性能的不断提高,要求飞行控制系统实现的功能越来越多,系统变得越来越复杂,从而迫使系统系统设计师们在可用的技术条件、任务和用户要求,飞机可用空间和动力,飞机的气动力特性及规范要求等诸因素的限制下,把许多分系统综合起来,实施有效的统一控制和管理。于是便出现了新一代数字化、智能化、综合化的电子系统-飞行管理系统(FMS-Flight Management System)。在1981年12月,飞行管理系统首次安装在B767型飞机上。此后生产的大中型飞机广泛采用飞行管理系统。 16.2飞行管理系统的组成和功能 16.2.1飞行管理系统的组成 飞行管理系统由几个独立的系统组成。典型的飞行管理系统一般由四个分系统组成,如图16-1,包括: (1)处理分系统-飞行管理计算机系统(FMCS),是整个系统的核心; (2)执行分系统-自动飞行指引系统和自动油门,见自动飞行控制系统; (3)显示分系统-电子飞行仪表系统(EFIS),见仪表系统; (4)传感器分系统-惯性基准系统(IRS)、数字大气数据计算机(DADC)和无线电导航设备。 驾驶舱主要控制组件是自动飞行指引系统的方式控制面板(AFDS MCP)、两部控制显示组件(CDU)、两部电子飞行仪表系统(EFIS)控制面板。主要显示装置是CDU、电子姿态指引仪(EADI)、电子水平状态指示器(EHSI)和推力方式显示。各部分都是一个独立的系统,既可以单独使用,又可以有多种组合形式。飞行管理系统一词的概念是将这些独立的部分组成一个综合系统,它可提供连续的自动导航、指引和性能管理。 图16-1飞行管理系统 16.2.2飞行管理系统的功能 FMS的主要功能包括导航/制导、自动飞行控制、性能管理和咨询/报警功能。FMS实现了全自动导航,大大减轻了驾驶员的工作负担。另外,飞机可以在FMS的控制下,以最佳的飞行路径、最佳的飞行剖面和最省油的飞行方式完成从起飞直到进近着陆的整个飞行过程。 FMS在各飞行阶段的性能管理功能: (1)起飞前 通过FMS的控制显示组件人工向FMC输入飞行计划、飞机全重和外界温度。如果飞行计划已经存入FMC的导航数据库,则可直接调入。飞行计划包括起飞机场、沿途航路点和目的机场的经纬度、高度等。 (2)起飞 根据驾驶员输入的飞机全重和外界温度,FMC计算最佳起飞目标推力。 (3)爬升 根据驾驶员的选择,FMC计算最佳爬升剖面。FMC还根据情况向驾驶员提供阶梯爬升和爬升地点的建议,供驾驶员选择,以进一步节约燃油。 (4)巡航 FMC根据航线长短、航路情况等因素,选择最佳巡航高度和速度。结合导航设施,确定起飞机场至目的机场的大圆航线,以缩短飞行距离。 (5)下降 FMC根据驾驶员输入或存储的导航数据确定飞机下降的顶点。在下降阶段,FMC确定下降速度,最大限度利用飞机的势能,节约燃油。 (6)进近 FMS以优化速度引导飞机到达跑道入口和着陆点。 16.2.3飞行管理计算机系统 由飞行管理计算机(FMC)和控制显示组件(CDU)组成。 飞行管理系统介绍 一、飞行管理系统(FMC)组成和基本功用 (一)、飞行管理系统(FLIGHT MANAGEMENT SYS)由五个分系统组成:1、飞行控制系统(DFCS) 包括自动驾驶(A/P)和飞行指引(F/D),其核心为两台飞行控制计算机,该系统用于自动飞行控制(FCC)和飞行指引。 2、自动油门系统(A/T) 其核心是一台自动油门计算机和两台发动机油门操纵的伺服机构,A/T 提供从起飞到着陆全飞行过程的油门控制。 3、飞行管理计算机系统(FMCS) 其核心是一台飞行管理计算机FMC和两台控制显示组件CDU,它用于从起飞到进近的几乎全部飞行过程的横向(LATERAL)剖面和纵向(VERTICAL)剖面的飞行管理。 我部的34N型飞机装有两部FMCS,这使飞行管理系统的可靠性更高。 4、惯性基准系统(IRUS) 其核心为两台惯导基准组件IRU,其主要功用为提供飞机的姿态基准和定位参数,也可用于飞机自备、远距导航。 5、电子飞行仪表系统(EFIS) 33A和34N型飞机装备的是电子飞行仪表系统,3T0型飞机装备的还是旧式的机械式仪表。由于飞行仪表的电子化,逐渐淘汰老式的机械式仪表,而电子飞行仪表必须有相应的字符,符号等图形信号发生器,以提供阴极射线管CRT或液晶LCD显示。EFIS就是起这个作用的电子式飞行仪表显示系统,它主要包括两台符号发生器(EFIS SG)和两套姿态指引仪(EADI)、两套水平状态指示器(EHSI)。 (二)、飞行管理系统的基本作用: 这套系统技术先进,设备量大,承担的任务多,其中最根本的功用是:1、实现飞行的自动化,大大减轻了飞行员的工作负担,减少人为操作所不可避免的差错和失误。 2、实现飞行全程的优化: (1)起飞阶段(TO)—根据飞机的全重和环境温度提供最佳目标推力。(2)爬升降段(CLB)—提供最佳爬升剖面:包括爬升点,阶段爬升的设置,目标推力和目标空速的设定。 (3)巡航(CRZ)—提供最佳高度和巡航速度,以及大圆航线和导航系统的选择和自动调谐。 (4)下降阶段(DSE)—提供下降顶点,目标下降速度和分段,以充分利用飞机高度下降所得到的动能,并以最佳的高度,速度和距离转入进近阶段。(5)进近(APP)—确定飞机在五边进近基准点时的高度、空速和距离。 飞行的优化不仅得到最合理的飞行路径,节省燃油和飞行时间,而且飞机机体的损耗率最少。 3、实现自动着陆 由于有两套自动驾驶通道,具有余度通道,借助仪表着陆系统可实现Ⅱ类气象标准的自动着陆(决断高度50英尺,跑道能见距离700英尺)和自动复飞。 二、FMC控制飞行过程工作概述 飞行过程可归纳为正常程序和辅助正常程序 1、正常程序 所谓正常程序就是自动飞行的标准程序,可分为如下七个飞行阶段:(1)起飞TAKE OFF 在完成起飞前准备后,只要按压TO/GA开关,即开始起飞程序,此时推力杆自动前进到起飞目标N1值,当飞机滑跑达到60节时,F/D指令杆提自动飞行控制系统电子讲稿第一部分
塔台飞行进程单专项考试题答案
飞行管理系统
飞行管理系统介绍