平面度计算方式

一、平面度定義:
平面度測量是指被測實際表面對其理想平面的變動量。平面度誤差是將被測實際表面與理想平面進行比較,兩者之間的線值距離即為平面度誤差值
二、理想平面計算方式-- 迴歸分析(Regression):
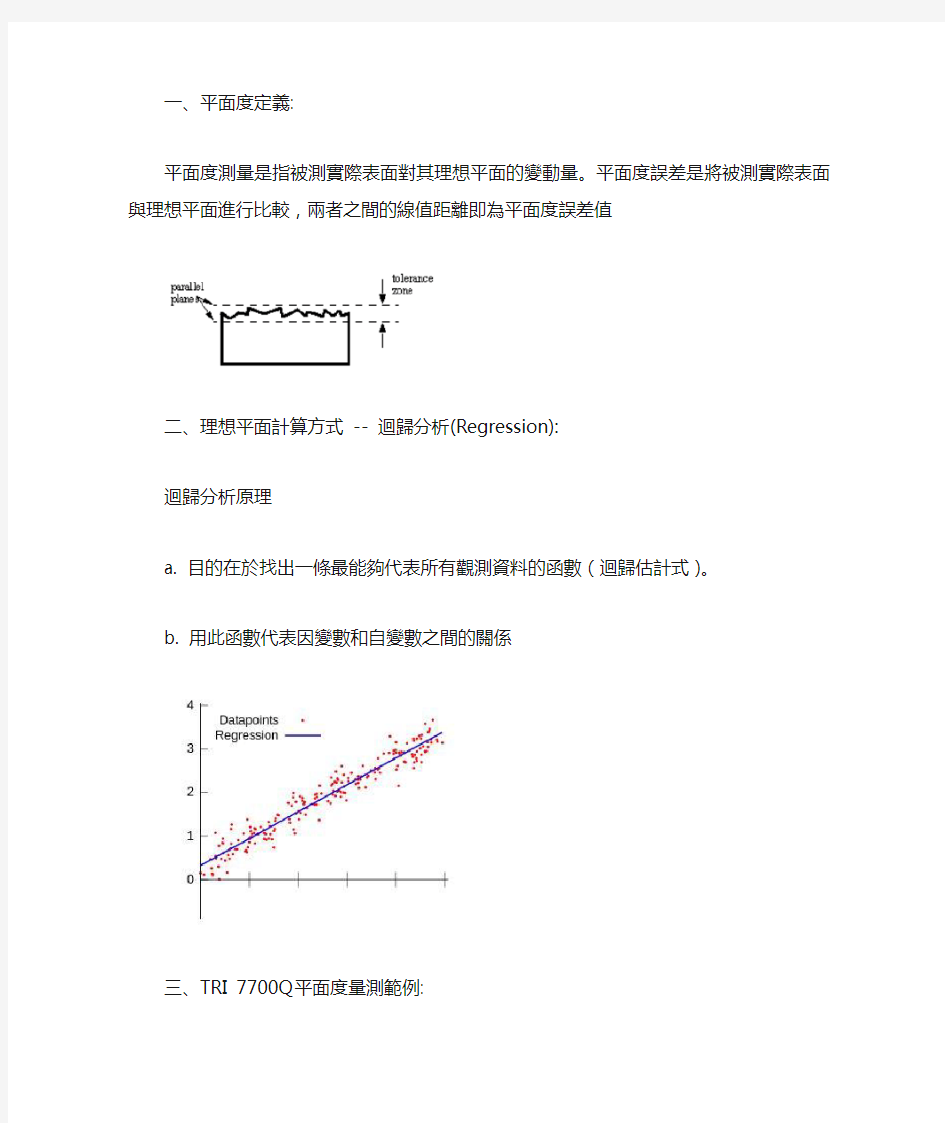
迴歸分析原理
a. 目的在於找出一條最能夠代表所有觀測資料的函數(迴歸估計式)。
b. 用此函數代表因變數和自變數之間的關係
三、TRI 7700Q平面度量測範例:
在平面上取得16個點的X, Y座標與Z絕對高度數據如下,
利用回歸分析算出理想平面函數: a0+a1*X+a2*Y = Z
得到三個參數a0, a1, a2,
將X, Y座標帶入理想平面公式, 得到每一點的理想平面高度Zs= a0+a1*X+a2*Y , 計算所有點的(原始高度-理想平面高度)得到差值Z-Zs=delta,
平面度結果即為Flatness=MAX(delta)-MIN(delta)
平整度數據與趨勢圖
平面度常识及测量方法
平面度误差测量数据处理。 在大中专学校机械类各专业中,《互换性与测量技术基础》是一门重要的技术基础课,该课程内容十分丰富,而教学课时相对较少,许多重点和难点内容难以作详细讲解。其中形位公差与技术测量的内容学生理解掌握更为困难,在四项形位公差中,直线度与平面度误差的测量是一般机械制造行业主要的检测项目,故要求学生重点学习和掌握。直线度误差的测量相对较为简单,而平面度误差的测量及数据处理比较复杂,且理解困难。本文仅对平面度误差的测量和数据处理作较为详细的介绍,希冀初学者能尽快掌握这一重点和难点内容。 一、平面度误差的测量 平面度误差是指被测实际表面对其理想平面的变动量。 平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。 平面度误差测量的常用方法有如下几种: 1、平晶干涉法:用光学平晶的工作面体现理想平面,直接以干涉条纹的弯曲程度确定被测表面的平面度误差值。主要用于测量小平面,如量规的工作面和千分尺测头测量面的平面度误差。 2、打表测量法:打表测量法是将被测零件和测微计放在标准平板上,以标准平板作为测量基准面,用测微计沿实际表面逐点或沿几条直线方向进行测量。打表测量法按评定基准面分为三点法和对角线法:三点法是用被测实际表面上相距最远的三点所决定的理想平面作为评定基准面,实测时先将被测实际表面上相距最远的三点调整到与标准平板等高;对角线法实测时先将实际表面上的四个角点按对角线调整到两两等高。然后用测微计进行测量,测微计在整个实际表面上测得的最大变动量即为该实际表面的平面度误差。 3、液平面法:液平面法是用液平面作为测量基准面,液平面由“连通罐”内的液面构成,然后用传感器进行测量。此法主要用于测量大平面的平面度误差。
怎样计算平板的平面度
怎样计算平板的平面度 1、最近很多朋友都向我咨询铸铁平板的平面度怎么计算,我整理了一些资料不知道对大家有没有帮助;有兴趣的朋友可以参考一下。对于用刀口尺和微米量块检定尺寸较小的平板,其平面度算法比较简单。但是对于大尺寸平板需要用电子水平仪或者自准直仪来检定,其数据处理是比较繁琐,也没有更好的手算方法,通常只能借助程序进行数据处理。对于小铸铁平板,按照米字形测量,其算法如下: a1 a2 a3 b1 b2 b3 c1 c2 c3 测量a1b2c3对角线,在a1、c3位置架设1mm的等高量块,在b2位置塞入恰好能塞入的量块(原理同塞尺),如恰好塞入1.003mm的量块,说明受检点处凹下0.003mm,同理测量米字形的八条线,记下数据。如得到一组测量数据(单位:μm): a1,b2,c3=0,-3,0 c1,b2,a3=0,-3,0 a1,a2,a3=0,-1,0 b1,b2,b3=0,-1,0 c1,c2,c3=0,-1,0 a1,b1,c1=0,-2,0 a2,b2,c2=0,-2,0 a3,b3,c3=0,-1,0 得到米字形数据表为: 0 -1 0 -2 -3 -2 0 -1 0 平板的平面度为3μm 以上不过这是特例,很多平板的对角线所测得的数据是无法正好重合的,需要以一根对角线为基准,另外七条线采用数据叠加的方法运算,但道理是相通的,如果大家有什么不明白的可以再问我。以下大家可以参考一下啊。 铸铁平板1、范围本标准规定了精度等给为000级、00级、0级、1级、2级、3级铸铁平板的型式与尺寸,技术要求,检验方法,标志与包装等。本标准适用于工作面为160m×100mm~ 4000mm×2500mm(长度×宽度)的铸铁平板(以下简称平板)。2、引用标准下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文,本标准出版时,所示版本均为有效。所有标准都会被修订,使用
扰度计算公式(全)
简支梁在各种荷载作用下跨中最大挠度计算公式: 均布荷载下的最大挠度在梁的跨中,其计算公式: Ymax = 5ql^4/(384EI). 式中: Ymax 为梁跨中的最大挠度(mm). q 为均布线荷载标准值(kn/m). E 为钢的弹性模量,对于工程用结构钢,E = 2100000 N/mm^2. I 为钢的截面惯矩,可在型钢表中查得(mm^4). 跨中一个集中荷载下的最大挠度在梁的跨中,其计算公式: Ymax = 8pl^3/(384EI)=1pl^3/(48EI). 式中: Ymax 为梁跨中的最大挠度(mm). p 为各个集中荷载标准值之和(kn). E 为钢的弹性模量,对于工程用结构钢,E = 2100000 N/mm^2. I 为钢的截面惯矩,可在型钢表中查得(mm^4). 跨间等间距布置两个相等的集中荷载下的最大挠度在梁的跨中,其计算公式: Ymax = 6.81pl^3/(384EI). 式中: Ymax 为梁跨中的最大挠度(mm). p 为各个集中荷载标准值之和(kn). E 为钢的弹性模量,对于工程用结构钢,E = 2100000 N/mm^2. I 为钢的截面惯矩,可在型钢表中查得(mm^4). 跨间等间距布置三个相等的集中荷载下的最大挠度,其计算公式:
Ymax = 6.33pl^3/(384EI). 式中: Ymax 为梁跨中的最大挠度(mm). p 为各个集中荷载标准值之和(kn). E 为钢的弹性模量,对于工程用结构钢,E = 2100000 N/mm^2. I 为钢的截面惯矩,可在型钢表中查得(mm^4). 悬臂梁受均布荷载或自由端受集中荷载作用时,自由端最大挠度分别为的,其计算公式: Ymax =1ql^4/(8EI). ;Ymax =1pl^3/(3EI). q 为均布线荷载标准值(kn/m). ;p 为各个集中荷载标准值之和(kn). 你可以根据最大挠度控制1/400,荷载条件25kn/m以及一些其他荷载条件 进行反算,看能满足的上部荷载要求! 机械零件和构件的一种截面几何参量,旧称截面模量。它用以计算零件、构件的抗弯强度和抗扭强度(见强度),或者用以计算在给定的弯矩或扭矩条件下截面上的最大应力。 根据材料力学,在承受弯矩Μ的梁截面上和承受扭矩T 的杆截面上,最大的弯曲应力σ和最大的扭转应力τ出现于离弯曲中性轴线和扭转中性点垂直距离最远的面或点上。σ和τ的数值为 -0.032√(C+W)-0.21√(RD↑2) 式中Jxx和J0分别为围绕中性轴线XX和中性点O的截面惯性矩;Jxx/y和J0/y分别为弯曲和扭转的截面模量(见图和附表)。一般截面系数的符号为W,单位为毫米3 。根据公式可知,截面的抗弯和抗扭强度与相应的截面系数成正比。
平面度误差计算(精)
平面度误差计算 第1章、绪论 1.1、引言平面是由直线组成的,因此直线度测量中直尺法、光学准直法、光学自准直法、重力法等也适用于测量平面度误差。测量平面度时,先测出若干截面的直线度,再把各测点的量值按平面度公差带定义利用图解法或计算法进行数据处理即可得出平面度误差。也有利用光波干涉法和平板涂色法测量平面误差的。而基于3坐标测量机(以下简称CMM)的平面度测量和数据处理具有方便、快捷、高效的优势,这是因为3坐标测量机具有通用性强、测量精确高、测量效率高等优点,所以其他测量方法很难与之比拟。 3坐标测量机自从1959年由英国的Fementi公司发明以来,在这近510年的时间里,已经得到了极大的发展。特别是经过近210多年的发展和应用,在机械制造领域已经比较普及。但是随着科技的发展,也不断出现1些需要提高的想法,特别是超精密加工技术的发展,引起更多的构想。而现在随着微机械和纳米的兴起,对3坐标测量机的要求就更是提出了更多的想法,尤其是我国,因为处于发展之中,所以就这些方面,就更应当有个比较合适、周密的思考。例如在坐标测量机出现之前,很多0部件的测量是10分困难的,特别是复杂的0部件的测量,往往采取化整为0的办法,多次定位,逐个尺寸进行测量,尤其是测量时间太长,测量的误差又大,这是可以想象得到的。特别是自动化加工的出现,测量1直被认为是机械制造生产率提高和精度提高的瓶颈。特别是复杂的构件,测量的时间比制造的时间还长,如果百分之百的检测,那是无法想象的。比如汽车的外形测量,更是困难重重。 正是因为3坐标测量机的出现,这种现象便排除了。不仅解决了测量的速度,而且提高了测量的精度,特别是机械加工的换刀机构的移植到测量上,更扩大了功能,这对制造领域提高质量方面引起了很大的促进作用,特别是精密型CNC3坐标测量机(CNC-CMM),促进了计量的自动化,大幅度提高了测量的效率和精度,并且代替了当前计量室的大部分测量工作,而将测量工作能在生产第1线上得到解决。国内外发展的FMC、FMS的生产线上大部分配置了3坐标测量机,这样就可能在制造1完成,质量也得到了评价,甚至起到质量的监控的作用。例如德国的MTO(发电机涡轮制造厂)的28种复杂0件的加工车间,是以自动化加工为主的,全部产品的检验是由4台Zeiss公司的CMM 组合在1起的测量中心测量,当天生产,当天测量,不仅测量了0件,而且可以发现加工设备的处在什么状态,起到了质量监控的作用。 本文就是在传统测量平面度误差的基础上进1步拓展测量视野,以计算机为依托,使用目前世界上最先进最流行的3坐标测量机进行平面度误差测量。
平面度的测量分解
平面度测量 工作单位:广东技术师范学院机电学院机械精度检测实验室作者:刘涵章关键词:平面度平面度误差三远点法三角形准则对角线准则对角线法 目录 一、什么是平面度 二、平面度误差值的各种评定方法 三、误差值评定的步骤: 四、实验教学中的实验仪器和实验步骤: 五、平面度误差值的各种评定方法应用举例 六、总结
一、什么是平面度 首先谈一谈什么是平面度,平面度就是实际平面相对理想平面的变动量。换句话说,就是被测平面具有的宏观凹凸高度相对理想平面的偏差。也可以说成是平整程度。 平面度公差是实际表面对平面所允许的最大变动量。也就是用以限制实际表面加工误差所允许的变动范围。这个变动范围可以在图样上给出。(可以插入一个图) 二、平面度误差值的各种评定方法 1. 最小区域判别准则: 由两个平行平面包容实际被测平面S时,S上至少有四个极点分别与这两个平行平面接触,且满足下列条件之一:(1)至少有三个高(低)极点与一个平面接触,有一个低(高)极点与另一个平面接触,并且这一个极点的投影落在上述三个极点连成的三角形内(三角形准则);(2)至少有两个高极点和两个低级点分别与这两个平行平面接触,并且高极点连线和低极点连线在空间呈交叉状态(交叉准则);这两个平行平面之间的区域即为最小区域,该区域的宽度即为符合定义的平面度误差值。就是最高点与最低点的差值。如下图所示: 2.三远点平面法和对角线平面法: 平面度误差值还可以用对角线平面法和三远点法评定。对角线平面法是指以通过实际被测平面一条对角线(两个角点的连线)且平行另一条对角线(其余两个角点的连线)的平面作为评定基准,取各测点相对于它的偏离值中最大偏离值(正值或零)与最小偏离值(零或负值)之差作为平面误差值。 三远点平面法是指以通过被测平面上相距最远的三个点构成的平面作为评定基准,取各测点相对于它的偏离值中最大偏离值(正值或零)与最小偏离值(零或负值)之值差作为平面度误差值。应当指出,由于从实际被测平面上选取相距最远的三个点有多种可能,因此按三远点平面法评定的平面度误差值不是唯一的,有时候差别颇大。 评定过程就是根据上述判别准则去寻找符合最小条件的理想平面位置的过程。可有多种数据处理方法,其中旋转法为最基本的方法。此法适用于前述各种测量方法获得的统一坐标值的数据处理。 三、误差值评定的步骤:
平面度常识及测量方法
创作编号: GB8878185555334563BT9125XW 创作者:凤呜大王* 平面度误差测量数据处理。 在大中专学校机械类各专业中,《互换性与测量技术基础》是一门重要的技术基础课,该课程内容十分丰富,而教学课时相对较少,许多重点和难点内容难以作详细讲解。其中形位公差与技术测量的内容学生理解掌握更为困难,在四项形位公差中,直线度与平面度误差的测量是一般机械制造行业主要的检测项目,故要求学生重点学习和掌握。直线度误差的测量相对较为简单,而平面度误差的测量及数据处理比较复杂,且理解困难。本文仅对平面度误差的测量和数据处理作较为详细的介绍,希冀初学者能尽快掌握这一重点和难点内容。 一、平面度误差的测量 平面度误差是指被测实际表面对其理想平面的变动量。 平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。 平面度误差测量的常用方法有如下几种: 1、平晶干涉法:用光学平晶的工作面体现理想平面,直接以干涉条纹的弯曲程度确定被测表面的平面度误差值。主要用于测量小平面,如量规的工作面和千分尺测头测量面的平面度误差。
2、打表测量法:打表测量法是将被测零件和测微计放在标准平板上,以标准平板作为测量基准面,用测微计沿实际表面逐点或沿几条直线方向进行测量。打表测量法按评定基准面分为三点法和对角线法:三点法是用被测实际表面上相距最远的三点所决定的理想平面作为评定基准面,实测时先将被测实际表面上相距最远的三点调整到与标准平板等高;对角线法实测时先将实际表面上的四个角点按对角线调整到两两等高。然后用测微计进行测量,测微计在整个实际表面上测得的最大变动量即为该实际表面的平面度误差。 3、液平面法:液平面法是用液平面作为测量基准面,液平面由“连通罐”内的液面构成,然后用传感器进行测量。此法主要用于测量大平面的平面度误差。 4、光束平面法:光束平面法是采用准值望远镜和瞄准靶镜进行测量,选择实际表面上相距最远的三个点形成的光束平面作为平面度误差的测量基准面。 除上述方法可测量平面度误差外,还有采用平面干涉仪、水平仪、自准直仪等用于测量大型平面的平面度误差。 二、平面度误差的评定方法 平面度误差的评定方法有:三远点法、对角线法、最小二乘法和最小区域法等四种。 1、三远点法:是以通过实际被测表面上相距最远的三点所组成的平面作为评定基准面,以平行于此基准面,且具有最小距离的两包容平面间的距离作为平面度误差值。 2、对角线法:是以通过实际被测表面上的一条对角线,且平行于另一条对角线所作的评定基准面,以平行于此基准面且具有最小距离的两包容平面间的距离作为平面度误差值。 3、最小二乘法:是以实际被测表面的最小二乘平面作为评定基准面,以平行于最小
平面度算法说明
检测工件平面度算法说明: 1:在基准面上取3个点分别为P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3)利用三点成面的公式计算出平面AX+BY+CZ+D=0作为基准平面 注:1、P1的X,Y坐标由人工输入,其余点有输入的X,Y移动量计算得出 2、所有点的Z坐标由激光测距仪提供 3、计算平面公式时,须计算出A,B,C,D A=y1*z2-y1*z3-y2*z1+y2*z3+y3*z1-y3*z2; B=-x1*z2+x1*z3+x2*z1-x2*z3-x3*z1+x3*z2; C=x1*y2-x1*y3-x2*y1+x2*y3+x3*y1-x3*y2; D=x1*y2*z3-x1*y3*z2-x2*y1*z3+x3*y1*z2+x2*y3*z1-x3*y2*z1; 2:在计算面上取3个点分别为P4(x4,y4,z4),P5(x5,y5,z5),P6(x6,y6,z6)利用点到平面的距离公式分别求出D1,D2,D3,然后计算出D1,D2,D3的平方差,通过平方差的大小来判断计算面与基准面之间的平行度 注:1、计算点到面的距离公式是:D=abs(ax0+by0+cz0+d)/sqrt(a*a+b*b+c*c); 2、计算方差公式为:Avg = (D1+D2+D3)/3 Var = ((D1-Avg)^2+(D2-Avg)^2+(D3-Avg)^2)/3 3、假设Par为设定的公差,则Par与Var之间的转换公式为Var = (4*Par*Par)/9,这个Var 即为设定的Var的上限(利用求极限法求出的) 4、程序运行页面显示的测量值为Display = Max(D1,D2,D3)-Min(D1,D2,D3),理由为 Display在Par之内才能算计算面的上下浮动的合理范围之内要是Display大于Par, 则肯定表示在Par之内。 基准面
三坐标测量位置度的方法及注意事项
三坐标测量位置度的方法及注意事项 位置度检测是机动车零部件检测中经常进行的一项常规检验。所谓“位置度”是指对被评价要素的实际位置对理想位置变动量的指标进行限制。在进行位置度检测时首先要很好地理解和消化图纸的要求,在理解的基础上选择合适的基准。位置度的检测就是相对于这些基准,它的定位尺寸为理论尺寸。 标签:三坐标;位置度 1 位置度的三坐标测量方法 1.1 计算被测要素的理论位置 ①根据不同零部件的功能要求,位置度公差分为给定一个方向、给定两个方向和任意方向三种,可以根据基准体系及确定被测要素的理论正确位置的两个理论正确尺寸的方向选择适当的投影面,如XY平面、XZ平面、YZ平面。②根据投影面和图纸要求正确计算被测要素在适当投影面的理论位置。 1.2 根据零部件建立合适的坐标系。在PC-DMIS软件中,可以把基准用于建立零件坐标系,也可以使用合适的测量元素建立零件坐标系,建立坐标的元素和基準元素可以分开。 1.3 测量被测元素和基准元素。在被测元素和基准元素取点拟合时,最好使用自动程序进行,以减少手动检测的误差。 1.4 位置度的评价。①在PC-DMIS软件中,位置度的评价可以直接点击位置度图标。②在位置度评价对话框中包含两个页面,特征控制框和高级,首先根据图纸要求设置相应的基准元素,在基准元素编辑窗口中只会出现在编辑当前光标位置以上的基准特征,如图1所示。③基准元素设置完成,回到特征控制框选择被测元素,设置基准,输入位置度公差。④在位置度评价的对话框中选择高级,在此对话框中可以设置特征控制框尺寸的信息输出方式和分析选项。如图2的对话框,在标称值一栏中手动键入被测要素的理论位置值,点击评价。 1.5 在报告文本中刷新就可以看到所评价的位置度结果。 2 三坐标测量位置度的注意事项 2.1 评价位置度的基准元素选择和建立坐标系的元素选择有相似之处,都要用平面或轴线作为A基准,用投影于第一个坐标平面的线作为B基准,用坐标系原点作为C基准。如果这些元素不存在,可以用构造功能套用、生成这些元素。 2.2 对位置度公差的理解。如位置度公差值t前加注φ,表示公差带是直径
计算器进行复数计算(免费)
一、使用方法 1.利用计算器进行复数计算必须要用计算器的度,按DRG键,使计算器显示窗中要有“DEG”标致(表示计算器进行所有带角度的运算均以“度”为单位)。 2.让计算器进入复数运算状态,分别按2ndF 和 CPLX,显示窗中有“CPLX”标致,表示计算器只能进行复数的运算,而进行其它计算则是无效的。取消则重复进行即可。进行复数的加减乘除运算时计算器必须处于复数运算状态。 二、计算说明 1.计算器中a、b的分别表示进行复数运算的实部和虑部,进行代数式输入时可以直接按此键。 2.计算器中→rθ、→xy的分别表示进行复数运算的模和角,进行极坐标式输入时必须利用上档键功能进行;同时这两个按键也是代数式和极坐标式转换的功能键。 3.计算器在进行复数运算时均是以代数式形式进行的,就是说在进行极坐标式计算时必须要先化成代数式,计算的结果也是代数式,如果希望得到极坐标式计算完成后也要进行转换。 4.显示结果运算完成后的结果就是代数式且显示的是实部,按b显示虑部,再按a就显示实部,转换成极坐标式后则按a显示模,按b显示角,也可重复显示。 5.在输入带有负号的值时,应先输入数值,再输入负号,输入负号应按+/-键。 三、计算举例 1.代数式化成极坐标式 例如:3 + j 4 = 5 /53.13o 按键步骤:(按键动作用“↓”表示。) 3↓a↓4↓b↓2ndF↓→rθ↓显示模5,b↓显示角53.13o。 2.极坐标式化成代数式 例如:15 /-50o = 9.64- j11.49 按键步骤: 15↓a↓50↓+/-↓b↓2ndF↓→xy↓显示实部9.64,b↓显示虑部-11.49。 3.代数式的加减乘除 例如:( 5 - j 4 ) × ( 6 + j 3 ) = 42 - j 9 = 42.953/-12.095o 按键步骤: 5↓a↓4↓+/-↓b↓×↓6↓a↓3↓b↓=↓显示实部42 b↓显示虑部–9。如要极坐标式只需继续进行转换即可。2ndF ↓→rθ↓显示模42.953,b↓显示角-12.095o。 如进行其它运算只需将乘号换成要进行的计算号即可。这里只给出计算结果请同学自己进行练习对比。实际计算时可取小数点后两位。 ( 5 - j 4 ) + ( 6 + j 3 ) = 11 - j 1 = 11.045 /-5.1944o ( 5 - j 4 ) - ( 6 + j 3 ) = -1 - j 7 = 7.071 /-98.13o ( 5 - j 4 ) ÷ ( 6 + j 3 ) = 0.4 - j 0.8667 = 0.9545 /-65.2249o 4.极坐标式的加减乘除 例如:5 /40o + 20 /-30o = 21.15 - j 6.786 = 22.213/-17.788o 按键步骤: 5↓a↓40↓b↓2ndF↓→xy ↓+ 20↓a↓30↓+/-↓b↓2ndF↓→xy↓=↓显示实部21.15,b↓显示虑部-6.786。再转换成极坐标式:2ndF↓→rθ↓显示模22.213,b↓显示角-17.788o。 如进行其它运算只需将乘号换成要进行的计算号即可。这里只给出计算结果请同学自己进行练习对比。 5 /40o - 20 /-30o = -13.49 - j 13.2139 = 22.213/135.5929o
Windows计算器如何进行角度计算
Windows计算器如何进行角度计算 1)启动计算器 开始-》所有程序-》附件-》计算器 在计算器的“查看”菜单中,选择“科学型”,在界面上选择“十进制”,“角度”,如图所示: 2) 度分秒的输入 i)按照小数形式,如45度28分41秒,可直接输入:45.2841;45度1分1 秒,可直接输入,45.0101; ii)输入后,选中“INV”前的复选框,点击计算器的“dms”按钮,将度分秒转化为度,如: 输入45.2841,选中INV,点击”dms”后,转化为: 45.478055555555555555555555555556度。 试验:将30度36分转化为度: 输入30.36,选中INV,点击”dms”后,转化为:30.6 3)将度转化为度分秒: 示例:将20.6度转化为度分秒形式: 输入20.6, 点击”dms”,按钮,转化为:20.36, 也即20度36分 需注意:将20.5度按上述方法转化为度分秒后,计算器显示:20.3 需补全位数20.3000 也即20度30分00秒 总之,如果计算结果小数点后不是4位,需在后补零直至为4位: 43.231补足零之后变为43.2310,也即43度23分10秒 4) 度分秒加减计算: 示例:计算45度34分21秒+44度25分39秒 输入:45.3421, 选中INV,点击”dms”,按钮,点“+”按钮,输入44.2539, 选中INV,点击”dms”,按钮,点“=”按钮,得到结果:90
示例:计算45度34分21秒+44度25分38秒 输入:45.3421, 选中INV,点击”dms”,按钮,点“+”按钮,输入44.2538, 选中INV,点击”dms”,按钮,点“=”按钮,得到结果:89.999722222222222222222222222222度,按”dms”按钮,转化为度分秒形式,得:89.5959 也即,89度59分59秒
平面度算法说明
精品文档 检测工件平面度算法说明: 1:在基准面上取3个点分别为P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3)利用三点成面的公式计算出平面AX+BY+CZ+D=0作为基准平面 注:1、P1的X,Y坐标由人工输入,其余点有输入的X,Y移动量计算得出 2、所有点的Z坐标由激光测距仪提供 3、计算平面公式时,须计算出A,B,C,D A=y1*z2-y1*z3-y2*z1+y2*z3+y3*z1-y3*z2; B=-x1*z2+x1*z3+x2*z1-x2*z3-x3*z1+x3*z2; C=x1*y2-x1*y3-x2*y1+x2*y3+x3*y1-x3*y2; D=x1*y2*z3-x1*y3*z2-x2*y1*z3+x3*y1*z2+x2*y3*z1-x3*y2*z1; 2:在计算面上取3个点分别为P4(x4,y4,z4),P5(x5,y5,z5),P6(x6,y6,z6)利用点到平面的距离公式分别求出D1,D2,D3,然后计算出D1,D2,D3的平方差,通过平方差的大小来判断计算面与基准面之间的平行度 注:1、计算点到面的距离公式是:D=abs(ax0+by0+cz0+d)/sqrt(a*a+b*b+c*c); 2、计算方差公式为:Avg = (D1+D2+D3)/3 Var = ((D1-Avg)^2+(D2-Avg)^2+(D3-Avg)^2)/3 3、假设Par为设定的公差,则Par与Var之间的转换公式为Var = (4*Par*Par)/9,这 个Var即为设定的Var的上限(利用求极限法求出的) 4、程序运行页面显示的测量值为Display = Max(D1,D2,D3)-Min(D1,D2,D3),
平面度
一般来说现在的先进的仪器都有自带的测量平面度的,但是,如果没有这些仪器,那么我们怎么测量或计算出平面度呢? 如果根据图纸要求,量出约4x4的点 -0.03, -0.02, -0.02, -0.03 0.05, 0.08, 0.07, 0.06 0.04, 0.01, 0.03, 0.02 -0.01, -0.02, -0.02, -0.03 如果用最小二阶乘法,该怎么去计算出平面度大小?别告诉我用最大减最小,那不靠谱。最好是公式和EXCEL的函数表达式 平面度误差测量数据处理。 在大中专学校机械类各专业中,《互换性与测量技术基础》是一门重要的技术基础课,该课程内容十分丰富,而教学课时相对较少,许多重点和难点内容难以作详细讲解。其中形位公差与技术测量的内容学生理解掌握更为困难,在四项形位公差中,直线度与平面度误差的测量是一般机械制造行业主要的检测项目,故要求学生重点学习和掌握。直线度误差的测量相对较为简单,而平面度误差的测量及数据处理比较复杂,且理解困难。本文仅对平面度误差的测量和数据处理作较为详细的介绍,希冀初学者能尽快掌握这一重点和难点内容。 一、平面度误差的测量 平面度误差是指被测实际表面对其理想平面的变动量。 平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。 平面度误差测量的常用方法有如下几种: 1、平晶干涉法:用光学平晶的工作面体现理想平面,直接以干涉条纹的弯曲程度确定被测表面的平面度误差值。主要用于测量小平面,如量规的工作面和千分尺测头测量面的平面度误差。 2、打表测量法:打表测量法是将被测零件和测微计放在标准平板上,以标准平板作为测量基准面,用测微计沿实际表面逐点或沿几条直线方向进行测量。打表测量法按评定基准面分为三点法和对角线法:三点法是用被测实际表面上相距最远的三点所决定的理想平面作为评定基准面,实测时先将被测实际表面上相距最远的三点调整到与标准平板等高;对角线法实测时先将实际表面上的四个角点按对角线调整到两两等高。然后用测微计进行测量,测微计在整个实际表面上测得的最大变动量即为该实际表面的平面度误差。 3、液平面法:液平面法是用液平面作为测量基准面,液平面由“连通罐”内的液面构成,然后用传感器进行测量。此法主要用于测量大平面的平面度误差。
可公度性计算器
可公度性计算器 计算公式列表(哪个为准我也不知道,解第十个数吧(重点),第十一十二两数次之): X1+ X3+ X4= X5+ X8- X4= X10+X3—X2= X10+X2—X1= X9+X5—X3= X10—X6—X4= X8+X9—X6= X10+X9—X8= X9+X9+X1—X6—X2= X9+X8+X1—X4—X2= X9+X7+X7—X6—X6= X8+X8+X4—X7—X2= X6+X4+X2—X1—X1= 不知道我整理的公式对不对,最好您在看看原文 天灾预测与可公度性(一) (2010-08-08 15:42:35)https://www.360docs.net/doc/dd16802526.html,/s/blog_5d6337eb0100ke4p.html 里面有介绍,具体实现我准备用三元和五元计算,如果您有七元八元计算公式我也笑纳了,准确就好!!! 希望有下面三方面功能,当然准确性要高一点最好。 1、同一数组在一个界面内显示,每次计算结果显示命中最多的二个数,并显示用到的公式 2、该公式和计算结果(一个或两个)在下次计算时作为参考比较,如果没有结果命中,按常识性的最接近的结果显示(比如最后一个数加1,3,5,7等等),公式计算结果允许1以内误差(重点) 2、不同数组最好像浏览器一样分页,可以同时查看,可以保存和调用不同数组, 3、预测结果可导出EXCEL或者比较规范的文本格式,方便生成表格 下面是我提供的两组数,界面以淡灰色不伤眼睛为主,两组数分别后面会有三个数字,命中两个就算任务通过(难度不大,我自己用计算器试了,嘿嘿)
数组1:62,68,74,80,84,87,90,92,95,104,后面三个数可能是???(误差0.5以内,允许2位小数) 数组2:74,80,84,87,90,92,95,104,109,下一个数是???(误差1以内,整数) 因为我本人数学太差,又比较懒,所以我提供的这个数也存在不准确性,如果你对公度性理解比较好或者计算器程序比较拿手的话,整个19元公度计算器,即使算不准我也收了,就当交个NB程序员朋友,哈哈!!!! 我每天都在线,只要程序适合,马上成交,谢谢。