LabVIEW应用于实时图像采集及处理系统

基于LabVIEW的摄像头视频图像实时采集
基于LabVIEW的摄像头视频图像实时采集 指导老师:李茂奎 小组成员:李化松李雷李成康乐 [摘要] 介绍了USB摄像头视频图像实时采集系统的基本原理及组成。该系统以LABVIEW为核心,通过调用windows平台的OCX控件完成系统的数据采集任务。整个系统结构清晰,构思新颖,具有一定的可操作性。 [关键词] USB摄像头;LabVIEW;视频图像实时采集 一、设计任务 1设计目标 设计一个基于LabVIEW的USB摄像头视频图像实时采集系统 2设计基本要求及发挥 1.能够实时地采集视频,并在电脑上显示出来 2.可以进行录像,拍照 3.美化程序界面,添加同步时间数码管显示功能。 二、方案论证 1.视频采集部分 方案一:采用vb语言编写的ovfw.ocx控件实现视频的实时获取,优点是使用方便,设置简单明了,同步性好,无延迟。缺点是无法实现录像功能。 方案二:采用windows平台的ezvidcap.ocx控件实现视频的实时获取,可以实现录像功能,缺点是设置繁琐,程序复杂。 鉴于此,我们选用了方案二。 https://www.360docs.net/doc/e82311691.html,BVIEW程序设计 采用usb接口的摄像头读入数据,并在程序中显示出来。利用控件本身的摄像录像功能实现数据的采集存储。 3.界面美化 增加了数码管样式的时间同步显示功能,同时增加了界面透明度可调旋钮,是界面产生玻璃状的美妙效果。 三、总体方案 1.工作原理: 利用现有的摄像头获取图像,通过调用windows平台的ezvidcap.ocx控件实现图像实时显示采集存储。 2.程序设计 LABVIEW从摄像头读入数据,通过空间调用,使图像在程序界面显示,并进行拍照录像等功能。
视频采集系统
数字图象处理技术在电子通信与信息处理领域得到了广泛的应用,设计一种功能灵活、使用方便、便于嵌入到监控系统中的视频信号采集电路具有重要的实用意义。 在研究基于DSP的视频监控系统时,考虑到高速实时处理及实用化两方面的具体要求,需要开发一种具有高速、高集成度等特点的视频图象信号采集监控系统,为此监控系统采用专用视频解码芯片和复杂可编程逻辑器件(CPLD)构成前端图象采集部分。设计上采用专用视频解码芯片,以CPLD器件作为控制单元和外围接口,以FIFO为缓存结构,能够有效地实现视频信号的采集与读取的高速并行,具有整体电路简单、可靠性高、集成度高、接口方便等优点,无需更改硬件电路,就可以应用于各种视频信号处理监控系统中。使得原来非常复杂的电路设计得到了极大的简化,并且使原来纯硬件的设计,变成软件和硬件的混合设计,使整个监控系统的设计增加柔韧性。 1 监控系统硬件平台结构 监控系统平台硬件结构如图1所示。整个监控系统分为两部分,分别是图象采集监控系统和基于DSP主监控系统。前者是一个基于SAA7110A/SAA7110视频解码芯片,由复杂可编程逻辑芯片CPLD实现精确采样的高速视频采集监控系统;后者是通用数字信号处理监控系统,它主要包括:64K WORD程序存储器、64K WORD数据存储器、DSP、时钟产生电路、串行接口及相应的电平转换电路等。 监控系统的工作流程是,首先由图象采集监控系统按QCIF格式精确采集指定区域的视频图象数据,暂存于帧存储器FIFO中;由DSP将暂存于FIFO中的数据读入DSP的数据存储器中,与原先的几帧图象数据一起进行基于H.263的视频数据压缩;然后由DSP将压缩后的视频数据平滑地从串行接口输出,由普通MODEM或ADSL MODEM传送到远端的监控中心,监控中心的PC机收到数据后进行相应的解码,并将还原后的视频图象进行显示或进行基于WEB的广播。 2 视频信号采集监控系统 2.1 视频信号采集监控系统的基本特性 一般的视频信号采集监控系统一般由视频信号经箝位放大、同步信号分离、亮度/色度信号分离和A/D变换等部分组成,采样数据按照一定的时序和总线要求,输出到数据总线上,从而完成视频信号的解码,图中的存储器作为帧采样缓冲存储器,可以适应不同总线、输出格式和时序要求的总线接口。 视频信号采集监控系统是高速数据采集监控系统的一个特例。过去的视频信号采集监控系统采用小规模数字和模拟器件,来实现高速运算放大、同步信号分离、亮度/色度信号分离、高速A/D变换、锁相环、时序逻辑控制等电路的功能。但由于监控系统的采样频率和工作时钟高达数十兆赫兹,且器件集成度低,布线复杂,级间和器件间耦合干扰大,因此开发和调试都十分困难;另一方面,为达到精确采样的目的,采样时钟需要和输人的视频信号构成同步关系,因而,利用分离出来的同步信号和监控系统采样时钟进行锁相,产生精确同步的采样时钟,成为设计和调试过程中的另一个难点。同时,通过实现亮度、色度、对比度、视频前级放大增益的可编程控制,达到视频信号采集的智能化,又是以往监控系统难以完成的。关于这一点,在监控系统初期开发过程中已有深切体会[1]。 基于以上考虑,本监控系统采用了SAA7110A作为视频监控系统的输入前端视频采样处理器。 2.2 视频图象采集监控系统设计 SAA7110/SAA7110A是高集成度、功能完善的大规模视频解码集成电路[2]。它采用PLCC68封装,内部集成了视频信号采样所需的2个8bit模/数转换器,时钟产生电路和亮度、对比度、饱和度控制等外围电路,用它来替代原来的分立电路,极大地减小监控系统设计的工作量,并通过内置的大量功能电路和控制寄存器来实现功能的灵活配置。
无线图像采集系统的设计与实现
0引言 视频监控目前已得到广泛的应用,一般采用如下方案:使用具有较高成像质量的CCD(charge-coupled device)传感器摄像头,通过S-VIDEO端子实时传送数据,这种方案需要摄像头与采集端设备连线,同时监控中心需要有较大的存储空间来存储图像与视频片段,还需要电视墙来对不同地点的目标进行实时监控,此方案适合于公共场所的安防和监控,实时性高,但能耗大,成本昂贵。对于需要远程监控的生产环境,例如农业、种植业、畜牧业以及工业厂房的监控,包括动物的异常举动,种植现场环境的突然变化,厂房可疑人员的入侵监控等,上述方案难以满足图像与视频中信息智能处理的需要,而基于嵌入式ARM-Linux的无线图像采集系统成为合适的选择。在802.11无线协议应用经已成熟的前提下,研究的重点在于传感器节点所采用的硬件平台和数据流格式,当前的主流方案包括:①ARM+DSP(digital signal processing)[1]:由ARM 架构CPU(central processing unit)担任传感器节点的总控制角色,利用DSP信号处理芯片的高速处理能力对图像数据进行压缩和相关预处理,该方案适合需要较多数值运算的JPEG (joint photographic experts group)数据流。②FPGA(field-progra-mmable gate array)+视频编解码芯片[2]:利用FPGA的并行处理能力同时传送和处理多组图像与视频数据,由于FPGA的硬件可重写性,该方案适合于在实验阶段进行设计上的查错和优化。③ARM:使用高主频的ARM架构CPU,同时担任中央控制和图像处理的角色。ARM为通用精简指令集架构,具有足够的流水线来应对复杂的逻辑运算,适用于处理逻辑运算量较大的压缩算法,例如PNG格式所采用的Deflate压缩算法,同时,ARM-Linux架构具有成熟的工作基础,固采用方案3设 收稿日期:2010-01-10;修订日期:2010-03-09。
LabVIEW应用于实时图像采集及处理系统
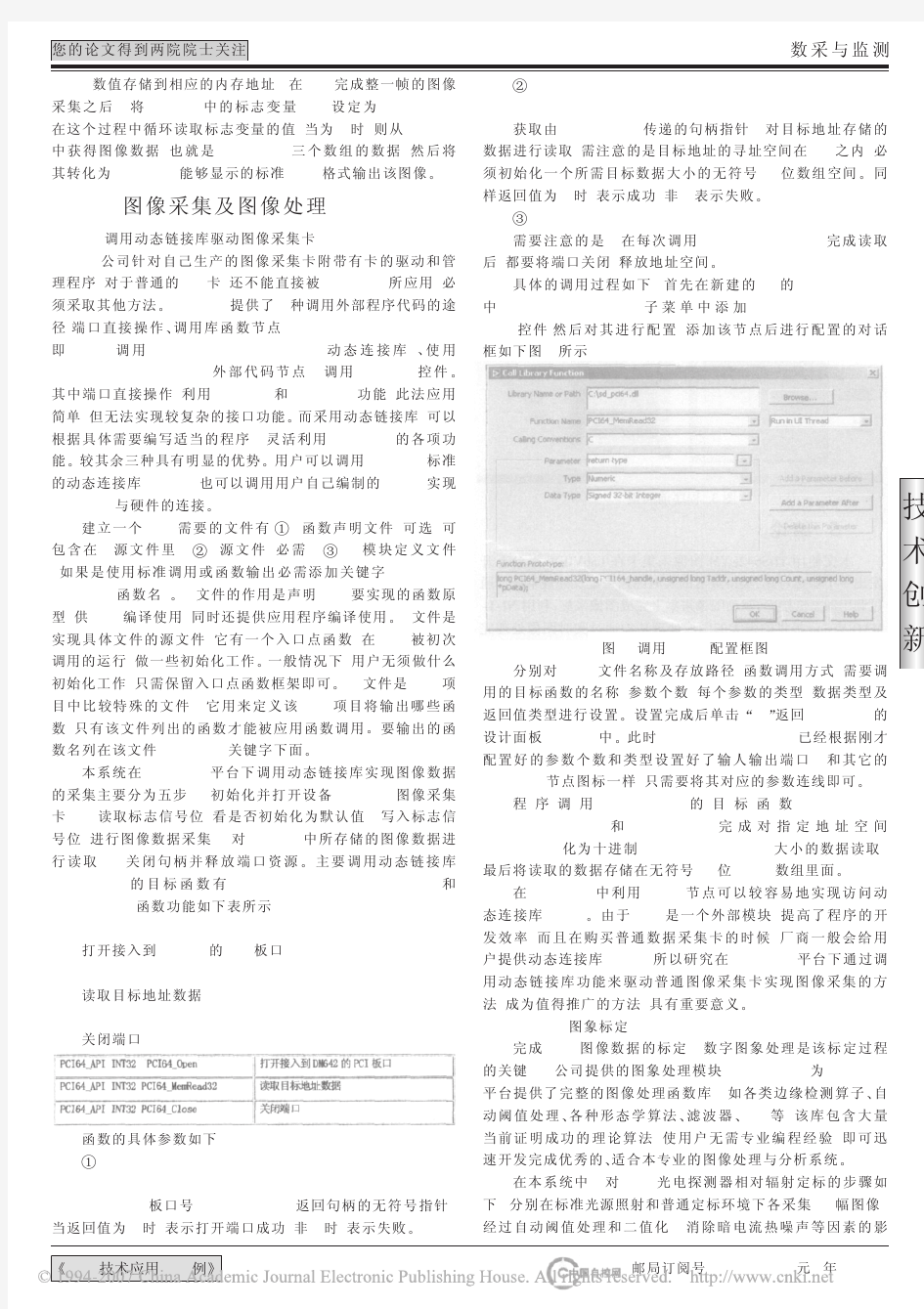
LabVIEW应用于实时图像采集及处理系统 2008-7-29 9:35:00于子江娄洪伟于晓闫丰隋永新杨怀江供稿 摘要:本文在LabVIEW和NI-IMAQ Vision软件平台下,利用通用图像采集卡开发一种图像实时采集处理虚拟仪器系统。通过调用动态链接库驱动通用图像采集卡完成图像采集,采集图像的帧速率达到25帧每秒。利用NI-IMAQ Vision视频处理模块,进行图像处理,以完成光电探测器的标定。该系统具有灵活性强、可靠性高、性价比高等优点。 主题词:虚拟仪器;图像处理;LabVIEW;动态链接库 1.引言 美国国家仪器(NI)公司的虚拟仪器开发平台LabVIEW,使用图形化编程语言编程,界面友好,简单易学,配套的图像处理软件包能提供丰富的图像处理与分析算法函数,极大地方便了用户,使构建图像处理与分析系统容易、灵活、程序移植性好,大大缩短了系统开发周期。在推出应用软件的基础上,NI公司又推出了图像采集卡,对于NI公司的图像采集卡,可以直接使用采集卡自带的驱动以及LabVIEW中的DAQ库直接对端口进行操作。 但由于NI公司的图像采集卡成本很高,大多用户难以接受,因此硬件平台往往采用通用图像采集卡,软件方面的图像处理程序仍采用LabVIEW以及视频处理模块编写。本文正是基于这样的目的,提出了一种在LabVIEW环境下驱动通用图像采集卡的方案,在TDS642EVM高速DSP视频处理板卡的平台下,完成实时图像采集及处理。 在图象处理的工作中主要完成对CCD光电探测器的辐射标定。由于探测器在自然环境下获取图像时,会受到来自大气干扰,自身暗电流,热噪声等影响,使CCD像元所输出信号的数值量化值与实际探测目标辐射亮度之间存在差异,所以要得到目标的精确图像就必须对探测器进行辐射标定。 2.图像采集卡简介 闻亭公司TDS642EVM(简称642)多路实时视频处理板卡是基于DSP TMS320DM642芯片设计的评估开发板。计算能力可达到4Gips,板上的视频接口和视频编解码芯片Philips SAA7115H相连,实现实时多路视频图像采集功能,支持多种PAL,NTSC和SECAM视频标准。本系统通过642的PCI接口与主机进行数据交换。PCI支持“即插即用(PnP)”自动配置功能,使图像采集板的配置变得更加方便,其一切资源需求的设置工作在系统初启时交由BIOS处理,无需用户进行繁琐的开关与跳线操作。PCI接口的海量数据吞吐,为其完成实时图像采集和处理提供保证。 3.系统组成及工作原理
在LabVIEW中使用千兆网相机采集图像1.2
在LabVIEW中使用千兆网相机采集图像版本控制
1目的 本手册主要目的为方便使用者基于LabVIEW开发平台,快速上手使用满足GigE Vision 的相机采集图像,为下一步的图像处理打下基础。本文档用于说明PC机第一次和相机相连的设置。 2硬件 电脑一台:带千兆网卡,一般在网卡名称中会有GBE类型的缩写,网卡支持巨帧(Jumbo Packpet),如下面右图所示。如果想要保证速度,最好使用Intel的千兆网卡。 GigE Vision相机,也称千兆网相机,主要优势为速度快,电缆够长,且能够POE供电。确保相机和电脑之间通过千兆网线相连,之间经过的网线接头、交换机越少越好。相机端最好用带螺丝的网线接头,确保连接在物理上可靠。如果非要接交换机,要考虑背板带宽。 3软件 在电脑上安装有LabVIEW和VDM(Vision Development Module)、VAS(Vision Acquisition Software),一般这三个软件版本需要一致。前者是开发平台,中间是视觉处理模块,后者是相机驱动。
1.关闭windows自带防火墙、360防火墙、杀毒一类软件。 2.打开网卡的巨帧功能。右键我的电脑》管理》设备管理器》网络适配器》选择网卡》右 键》属性》高级》属性》巨型帧/极大帧,更改值为最大,一般为9KB MTU。
3.如果网卡不支持巨帧,可以尝试调小网络包的大小。在Max中,点击相机,在获取属 性中,更改包大小packetsize,可以尝试更改为2000或者1000. 4.使用相机自带的软件先进行测试,去相机供应商的网站下载合适的相机驱动,注意电脑 操作系统的位数,32位下载X86,64位下载64位。 a)这里使用Basler的软件pylon IP Configurator。把相机的IP地址设至为与电脑同一 IP段。即IP地址前三位一样。 b)采集连续图像,在pylon Viewer中,点击一个相机进行连接。 c)方框为连接、断开相机,橙色方框为采集、连续采集、停止按钮 d)如果画面太黑或太白,将紫色方框内的用户等级改成专家(Guru),然后选择相机 属性(Basler acA1300-30gm*****)下面的Acquisition Controls》Exposure Auto,改 成自动,然后连续采集几张照片,就可以将曝光时间调整好。
基于arm的视频图像采集系统
基于arm的视频图像采集系统 摘要:本系统采用了Samsung公司生产的S3C2440芯片作为嵌入式处理器,再结合系统所需的外围硬件构成基本硬件电路。主要包括二大部分:处理器和存储器部分;电源时钟复位电路部分;外围接口电路部分。在对各部分硬件进行详细设计后,接下来详细介绍了嵌入式软件平台的构建,包括如何移植Linux操作系统:基于嵌入式Linux下USB接口摄像头视频设备采集;移植H.264视频压缩库和视频传输程序的编写。 1 抓拍系统开发环境的构建 本文所设计的采集系统按功能可划分为嵌入式主控模块、视频采集模块、网络传输模块、等三大部分。图1-1为本系统的系统框架图: 1. USB数字摄像头采集图像数据: 2.采集传输应用程序通过摄像头驱动从摄像头获取到采集的图像数据: 3.采集传输应用程序调用H.264编码库对图像数据进行压缩: 4.采集传输应用程序将压缩后的图像数据通过网络传输给windows PC上 的显示程序: 5. Windows上的显示程序对图像数据进行解码并显示: 图1-1软件架构图 本系统的嵌入式主控模块是基于Samsung公司生产的S3C2440这款处理器,主要作用是实现对各模块数据的响应、处理以及控制。在硬件上,主控模块包括电源、时钟、复位电路、存储模块、以太网接口电路等。在软件上,主控模块上运行Linux操作系统,管理各应用程序模块进程并调度各进程。
1.1采集系统的硬件平台设计 本系统的核心处理器为二星公司的S3C2440,外扩64M的SDRAM存储器以及64M 的FLASH存储器,外围接口电路模块:包括USB接口电路,以太网网卡DM9000接口电路以及网眼3000的数字摄像头等。本系统的硬件结构如图1-2所示。 图1-2系统硬件架构图 1.1.1电源、时钟模块设计 系统各部分硬件要求提供1.8V和3V的电压。其中S3C2440处理器内核需要提供1.8V 电源,NandFlash, SDRAM及DM9000等芯片需要提供3V电源,所以本系统采用了LM1117-3.3和LM1117-1.8电压转换芯片设计稳压电源,得到1.8V和3.3V的所需电压。USB 控制器需要提供5V的电源。本文采用了5V直流电压供电。LM1117是一个低压差电压调节器系列。其压差在1.2V输出,负载电流为800mA时为1.2V 。LM1117有5个固定电压输出(1.8V, 2.5V, 2.85V, 3.3V和5V)的型号。根据本系统的需要,这里选用了电压输出为1.8V 和3.3V两型号。 时钟电路为CPU和其它外围电路提供精准的工作时钟,按照电路中设计使用的器件特性分为有源和无源晶振,在本系统的设计电路中采用的是无源晶振。ARM芯片均提供时钟发生电路,结合一定的辅助电路的配合就可以得到所需要的时钟信号。基十ARMS的这款S3C2440芯片的时钟控制逻辑可以产生为CPU核供给时钟信号的FCLK、为AHB总线供给时钟信号的HCLK、为APB总线供给时钟信号的PCLK。 1.1.2外部存储器的扩展 S3C2440微处理器存储空间仅有32M,应用于本系统,需要外扩存储器。本设计采用两片二星公司的HY57V561620来扩展64M的SDRAM。它们均4M* 16bit*4bank的SDRAM 芯片,这样,两片SDRAM实现了位扩展,数据总线达到了32bit,构成64M寻址空间。图1-3为S3C2440与NandFlash的接口图。
图像采集系统设计
DSP实习报告 题目:图像采集系统的设计 班级:xxx 姓名:xxx 学号:xxx 指导老师:xxxx
目录 一.实习题目 (3) 二.实习背景知识 (3) 三.实习内容 (5) 四.实习程序功能与结构说明 (8) 六.实习心得 (19)
一、实习题目 图像采集系统的设计 二、实习目的: 1、熟练掌握数字信号处理的典型设计方法与技术手段; 2、熟悉D6437视频输入,输出端的操作及编程。; 3、掌握常用电子仪器设备的使用方法; 4、熟悉锐化变换算法。 三、实习背景知识 1、计算机 2、CCS3.3.软件 3、DSP仿真器 4、EL_DM6437平台 EL-DM6437EVM是低成本,高度集成的高性能视频信号处理开发平台,可以开发仿真达芬奇系列DSP应用程序,同时也可以将该产品集成到用户的具体应用系统中。方便灵活的接口为用户提供良好的开放平台。采用该系列板卡进行产品开发或系统集成可以大大减少用户的产品开发时间。板卡结构框图如图所示:
板卡硬件资源: TMS320DM6437 DSP ,可工作在400/600 MHz; 2 路视频输入,包括一个复合视频输入及一个S端子视频输入; 保留了视频输入接口,可以方便与CMOS影像传感器连接; 3 路视频输出,包括2路复合视频,一路S端子输出; 128MByte 的DDR2 SDRAM存储器,256MBit的Nor Flash存储器;用户可选的NAND Flash接口; 可选的256K字节的I2C E2PROM; 1个10M/100Mbps自适应以太网接口; 1 路立体声音频输入、1路麦克风输入,1路立体声音频输出; USB2.0高速接口,方便与PC连接; 1个CAN总线、1个UART接口、实时时钟(带256Byte的电池保持RAM);4个DIP开关,4个状态指示LED; 可配置的BOOT模式; 10层板制作工艺,稳定可靠; 标准外部信号扩展接口; JTAG仿真器接口; 单电源+5V供电; 板卡软件资源:
PCB图像采集系统研究背景意义及国内外现状
PCB图像采集系统研究背景意义及国内外现状 1 研究背景 2 AOI系统的研究和国内现状 3 研究意义 1 研究背景 印刷电路板(Printed Circuit Board,PCB)又称为印刷线路板或印制电路板。印刷电路板是各种电子产品的主要部件,有“电子产品之母”之称,它是任何电子设备及产品均需配备的,其性能的好坏在很大程度上影响到电子产品的质量。几乎每一种电子设备都离不开PCB,小到电子手表、计算器,大到航空航天、军用武器系统等,都包含各式各样,大小各异的PCB板。近年来,随着生产工艺的不断提高,PCB正在向超薄型、小元件、高密度、细间距方向快速发展。这种趋势必然给质量检测工作带来了很多挑战和困难。因此PCB故障的检测已经成为PCB制造过程中的一个核心问题,是电子产品制造厂商非常关注的问题。在生产线上,厂家为保证PCB板的质量,就得要求100%的合格率,对所有的部件、子过程和成品都是如此。在过去靠人工对其进行检测的过程中,存在以下几个不可避免的缺点: (1)容易漏检。由于是人眼检测,眼睛容易疲劳,会造成故障不能被发现的问题。并且人工检测主观性大,判断标准不统一,使检测质量变得不稳定。 (2)检测速度慢,检测时间长。比如对于图形复杂的印刷电路板,人工很难实现快速高效的检测,因此人工检测不能满足高速的生产效率。 (3)随着技术的发展,设备的成本降低,人工费用增加,仍然由人工进行产品质量控制,将难于实现优质高效,而且还会增加生产成本。 (4)在信息技术如此发达的今天人工检测有不可克服的劣势,例如:对检测结果实时地保存和远距离传输,对原始图像的保存和远距离传输等。 (5)有些在线检测系统是接触式检测,需要与产品进行接触测量,因此,有可能会损伤产品。 因此,人工检测的精确性和可靠性大打折扣,传统意义上的检测方法不再能适应现代电路板检测的要求。如果漏检的有错误的电路板进入下一道工序,随着每一项工艺步骤的增加,到最终经过贴装阶段后,仍然会被检测出来是有故障的,那时,制造厂商与其花费大量的人力和成本来检测、返修这块电路板,还不如选
视频交通流采集系统解决方案
视频交通流信息采集系统解决方案 1概述 视频交通流信息采集系统主要包括视频图像采集设备、视频传输网络、交通流视频检测器等。视频检测器采用虚拟线圈技术,利用边缘信息作为车辆的检测特征,实时自动提取和更新背景边缘,受环境光线变化和阴影的影响较小;同时采用动态窗的方式来进行车辆计数,解决了采用以往固定窗方式进行车辆计数时由于车辆变道而导致的错误、重复计数问题。视频检测器能对视频图像采集设备或交通电视监视系统的视频信号自动进行检测,主要采集道路的微观交通信息如流量、速度、占有率、车辆间距、排队长度等,适用于近景监控模式。 2系统功能及特点介绍 2.1数据接口设计 视频交通流信息采集系统可以通过调用本项目提供的交通流数据统一接入接口,或由本项目提供数据格式标准化及上传程序,将采集到的交通流数据共享给本项目相关系统,以实现视频交通流数据的采集功能。 图1 数据接口设计 2.2系统功能 交通流信息视频检测系统的主要功能如下: (1)车辆检测 系统能够对输入的视频流图像进行车型、车牌等特征检测。
(2)交通流数据采集功能 系统可以采集交通流数据包括交通流量、平均车速、车道占有率、车型、平均车头间距、车辆排队长度、车辆密度、交通流状态等,交通流数据采集时间间隔在1~60分钟任意可调。 图 2 视频交通流检测模块 (3)视频图像跟踪功能 系统能对单路监控前端设备在不同预置位采集的视频图像进行不同区域不同事件的自动检测。一旦检测到特定的交通事件,事件检测器应具有该交通事件的视频图像目标自动跟踪、记录、分析功能。 当输入的视频图像不为设定的预置位的视频图像,系统应能自动不进行事件检测。一旦监控前端设备恢复至设定的预置位,系统应能自动进行事件检测。 (4)事件图像抓拍、录像功能 系统可以根据用户的设置,完成相应的录像和图片抓拍功能。 事件录像可以按摄像机、按事件类型、按时间归档存储在系统的预录像子系统中,由系统服务器进行统一的管理调用。 系统循环进行录像,当发生交通异常事件时,系统能够提供事发之前和之后的3分钟间的录像(可设置)。 系统可通过多种组合查询条件对视频交通流检测所采集的数据进行统计,包括时间-流量统计、时间-平均车速统计、时间-占有率统计、速度-流量统计等;统计结果可导出为
基于Labview的图像采集与处理
目前工作成果: 一、USB图像获取 USB设备在正常工作以前,第一件要做的事就是枚举,所以在USB摄像头进行初始化之前,需要先枚举系统中的USB设备。 (1)基于USB的Snap采集图像 程序运行结果: 此程序只能采集一帧图像,不能连续采集。将采集图像函数放入循环中就可连续采集。
循环中的可以计算循环一次所用的时间,运行发现用Snap采集图像时它的采集速率比较低。运行程序时移动摄像头可以清楚的看到所采集的图像有时比较模糊。 (2)基于USB的Grab采集图像 运行程序之后发现摄像头采集图像的速率明显提高。
二、图像处理 1、图像灰度处理 (1)基本原理 将彩色图像转化成为灰度图像的过程成为图像的灰度化处理。彩色图像中的每个像素的颜色有R、G、B三个分量决定,而每个分量有255中值可取,这样一个像素点可以有1600多万(255*255*255)的颜色的变化范围。而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。图像的灰度化处理可用两种方法来实现。 第一种方法使求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。 第二种方法是根据YUV的颜色空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B三个颜色分量的对应:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。 (2)labview中图像灰度处理程序框图 处理结果:
基于虚拟仪器的图像采集处理及仪器控制
第32卷增刊2006年8月光学技术 O PT I C A L T E C H N I Q U E V01.32Sup pl. A u gust2006 文章编号:1002—1582(2006)S-0422.03 基于虚拟仪器的图像采集处理及仪器控制+ 周秀荣,尚凯文,崔小虹,邢冀川 (北京理工大学光电工程系,北京100081) 摘要:针对激光测距机三光轴平行度调校,提出了由C C D摄像机摄取激光光斑图像,然后用图像采集与处理方法计算白光十字线中心与光斑中心偏差的方法,并对选用的图像处理算法进行了论述。此外,采用可变固定衰减片方法测量激光测距机接收系统的灵敏度。以LabV I E W为软件平台,开发出检测激光光轴中心及控制衰减器的虚拟仪器系统。该系统具有直观形象,使用方便,可移植性强等优点。 关键词:虚拟仪器;L abV l E W;图像采集;数字图像处理;仪器控制 中图分类号:TN911.72文献标识码:A I m age acqui s i t i on and pr ocessi ng a nd i nst r um e nt cont r ol ba se d on vi r t ual i ns t r um ent Z H O U X i u—r ong,S H A N G K ai.w e n,C U I X i ao-hong,X l N G Ji.chua n (D e par t m e nt of O pt o-el ec t r oni c E nge nee r i ng,Bei j i ng I ns t i t ut e of T e chnol ogy,Bei j i ng100081,C hi na) A b st r act:I n or der t O m ea sure t he t hree-l ight.axi s paral l el it y of l as er t e l e m e t er,w e u s e C C D t o get l as er s pot i m a ge a nd t h en cap t ur e and pr o cess t he i m a ge t o cal cu l at e t he pos i ti on er r or bet w e en t he cent er of w hi t e l i ght cr os s l i ne and t hat of t he spot and exp l ai n s el ect ed i m a ge pr oces si ng ar i t hm et i cs.B esi des,di f f er ent at t enu at or s ar e appl i e d t o m ea s u r e t he s en s i t i vit y of re e ei v—el".W e s el e ct LabV l E W as so f t w ar e t O de vel op vi rt ual i nst r um ent s ys t e m s t o gai n t he cent er of l as er axi s and cont r o l t he a t te nu—at o r.T h i s s yst e m i s i ntui t i o ni s ti c a nd conve ni ent t o l i s a and ca n be r eu sed i n di f f er ent appl i cat ions. K e y w or ds:vi r t u al i nst r um ent;LabV I EW;i m age acqui si t i o n;di gi t al i m a ge pr oces si ng;i nst r um en t cont r ol 1激光测距机三轴平行度调校系统整体方案 激光三轴平行度调校系统主要由大口径离轴抛物面反射镜、激光模拟器组件、长焦距C CD摄像机、白光光源组件、衰减器、漫反射靶、电控柜、图像采集及处理分系统、光学平台及二次检校设备等构成,其组成框图如图1所示。 图1激光三轴平行度调校系统组成框图 白光光源发射白光,经析光镜透射后又经离轴抛物面镜反射,进入二次校准设备。二次校准设备主要由五棱镜和经纬仪组成,它可以进行离轴抛物面镜准直性的自检。激光测距机发射系统发射的激光束经衰减器后又经过离轴抛物面镜的反射和析光镜的透射打到白光光源前的毛玻璃或漫反射靶上,形成二次光源,经过离轴抛物面镜反射后成为平行光束,进入C C D摄像机。这样光斑图像就被拍摄下来,送人图像采集与处理分系统进行求取中心及计算偏差的处理。激光模拟器组件用于模拟发射激光的回波。为测量激光测距机接收系统的灵敏度,激光模拟器组件中包含了衰减器。衰减盘放于精密电控旋转台上,由步进电机控制器控制。为方便操作,步进电机控制器、激光模拟器控制装置以及进行图像采集处理与仪器控制的计算机统一放到电控柜中。本文主要介绍图像采集处理分系统以及衰减器组件两部分。 2图像采集与处理 首先用图像采集卡将C C D拍摄的激光光斑图像转化为数字图像,然后用数字图像处理的方法获得光斑中心,计算白光十字分划线中心与光斑中心的偏差,根据差值调整激光测距机的发射光轴,直至二者重合‘l I,具体过程如图2所示。 _收稿日期:2006—06—27E-m a i l:zx i ur ong@bi t edu.cn 作者简介:周秀荣(1982一),女,河北省人,北京理工大学硕士研究生,从事光电子技术研究。422
基于ARM的图像采集处理系统设计
基于ARM的图像采集处理系统设计
摘要 随着现代制造工业中微细加工技术的不断发展,对微细零件表面形貌测量的要求越来越高,具有较高横向及纵向分辨率的激光并行共焦显微系统可以突破光学衍射的极限要求,对物体表面进行无损检测及三维形貌重构。为了进一步实现光学系统的便携化、智能化需求,具有体积小、成本低、专用性强等一系列独特优点的嵌入式系统,无疑有着极好的应用前景。 本文主要研制了一种基于ARM的便携式图像采集处理系统。论文主要以硬件设计和软件设计两大部分完成对系统的论述:硬件设计中,通过分析实际图像采集需求后总结设计的主要性能指标,确定了采集系统的主要控制平台和图像传感芯片,给出了总体的硬件设计方案,并在此基础上完成了SCCB控制模块、图像数据捕获模块、串口调试模块等硬件接口模块的设计;软件设计中,完成了CMOS 的驱动程序、图像数据采集的驱动程序、Bayer图像数据转换算法等软件设计工作,最后论述了静态图像采集系统相关调试、实验工作,结果表明此嵌入式图像采集系统基本达到预期目标,证明了设计的合理性和正确性。 本系统一定程度上提高了低功耗微控制器图像采集的效率,将图像采集系统对硬件的依赖转化为设计人员的软件设计工作,相对于传统PC机+CCD的方案,不仅在体积、成本上具有明显优势,更体现出良好的柔性,便于今后的维护、优化。 关键词:ARM,LPC2478,图像采集,便携式
第一章绪论 1.1 嵌入式系统概述 1.1.1 嵌入式系统 嵌入式系统被IEEE(国际电气和电子工程师协会)定义为“是一种用来控制、监视或者辅助仪器、机械操作的装置”。无论嵌入式计算机技术如何发展,都改变不了其“内含计算机”、“嵌入到对象体系中”、“满足对象智能化控制要求”的技术本质,因此可以将嵌入式系统定义为:“嵌入到对象体系中的专用计算机应用系统”。 嵌入式系统具有3个基本特点,即“计算机性”、“嵌入性”及“专用性”: ●“计算机性”是目标系统智能化、自动化控制的根本保证,内含 微处理器的现代电子系统,方才能实现目标系统的计算机智能化 控制能力; ●“嵌入性”则是专指起源于微型机、嵌入到目标对象系统进而实 现对象体系智能控制的特性; ●“专用性”是指为了贴合对象控制需求或特定环境要求下的软硬 件的裁剪性。 嵌入式系统在很多产业中都得到了广泛的应用,包括消费电子、国防军事、工业控制等领域应用的越来越广泛,从军用的导弹系统到民用的消费电子、智能家电、汽车,嵌入式系统无处不在。 1.1.2 嵌入式处理器 通用计算机处理器的系统拥有大量的应用编程资源、外设接口总线及先进的高速缓存逻辑,但也具有能源消耗大、产生热量高、成本尺寸大等不可回避的问题,因此诞生了为各种专用应用而设计的特殊目的处理器——嵌入式处理器,主要分为以下四类: ●嵌入式微处理器:在应用中将微处理器装配在专门设计的电路板 上,只保留和嵌入式应用有关的母板功能而换来系统体积和功耗 的大幅减小,在功能上保留和标准微处理器一致的同时更在工作 温度、抗电磁干扰、可靠性等方面得到增强。 ●嵌入式微控制器:即单片机,就是将整个计算机系统集成到一块 芯片中,一般以某一微处理器内核为核心,芯片内部集成ROM、 RAM、总线等必要功能和外设,是目前嵌入式系统工业的主流。 ●嵌入式DSP处理器:对系统结构和指令进行了特殊设计,使其适
实时图像采集系统的设计与实现
实时图像采集系统的设计与实现 引言 随着数字多媒体技术的不断发展,数字图像处理技术被广泛应用于身份识别、电视会议、监控系统、工业检测等各种商用、民用及工业生产领域中。这些数字图像处理系统中,一个共同的特点的就是数据量庞大,尤其是在图像帧率及分辨率要求比较高的场合下,以指纹识别系统为例,图像分辨率的高低直接影响系统的鲁棒性,一般来说,为了能够清晰的辨别指纹中的特征结构,指纹图像需要达到至少500DPI的分辨率。通常,为了能够满足各类手指大小以及采集方式的要求,图像采集系统的尺寸都不可能做得太小(一般在2英寸以上),这就要求图像解析度至少达到1024×768,最好是1280×1024(1.3M),如果要做到实时采集和处理(30F/s),数据量将达到1280×1024×30×8=300Mbit/s。 伴随着超大规模集成电路和DSP处理技术的飞速发展,新的高速CPU和高性能DSP处理芯片不断推出市场,在这些技术的有力支持下,复杂的图像处理算法往往容易实现。与此同时,图像数据采集部分由于缺乏专用芯片的支持,而且受限于系统总线带宽,已经成为数字图像系统中的主要瓶颈所在。 主流的图像采集方式 目前数字图像采集主要采用两种方式: 一种是以专用的数据采集卡,配合PC机的各种高速数据总线如PCI,USB2.0,firewire1394等采集数据。 PC机的优势是拥有大量的高速内存可以用作数据采集时的缓存,而且它的各种数据总线具有比较高的数据传输率,PCI总线的速率为32(Bit)×66=2112Mbit/s,USB2.0的数据传输峰值可以达到480 Mbit/s,firewire也可以达到400Mbit/s的传输速率。问题在于,PC机的体系结构决定了任何外设都只可能是从设备,只能请求总线资源,而不能主动占有。在Windows(或是Linux)这些实时多任务操作系统的调度下,即使在系统不运行其它应用程序的情况下,系统时间片和系统资源也会被操作系统内核和各类外设分享。尤其是PCI总线,包括内存、硬盘在内的很多PC内置设备都会用到PCI,实际留给采集程序的总线带宽将大打折扣。正因为如此,现在基于PC的数据采集设备性能都不太理想,采集1.3M象素图像时只能达到每秒7、8帧的帧率,达不到实时性要求。 另外,对PC机的依赖直接限制了这类系统的应用范围,也间接提高了系统成本。 另一种方法是基于嵌入式DSP和FPGA的采集方法。通过FPGA或CPLD 的控制和调度,利用DSP的数据通道来采集数据。嵌入式平台具有便携性好,成本较低的优势,越来越多的应用到数字图像处理的各个领域。 一个成熟的系统体系结构要求系统内各部分分工明确,同时又具有一定的通用性和可移植性。嵌入式平台上的DSP芯片在数字信号处理方面有着独到的优势,但是通用性能无法和PC机上的CPU相比,通常主要用来处理复杂的运算。实时数据采集属于简单而繁琐的任务,用DSP完成可谓大材小用,势必影响整个系统的性能。即使是某些DSP可以用DMA方式采集数据,但是由于图像的
用Labview实现图像采集
用Labview实现图像采集 一、程序功能: 1.通过选择相机实现电脑摄像头或CCD连续图像采集。 2.控制图像采集时间。 3.显示图像采集速率和程序运行时间。 4.给采集到的图像命名并保存到特定的文件夹。 二、程序介绍: 1.前面板(控制面板) 要求:实现连续图像采集所需要的软件条件: 1.安装VAS(Vision Acquisition Software) 2.如果要实现CCD图像采集,需安装CCD的驱动程序 操作说明: 1.选择相机名称 2.设置采集时间 3.运行VI 相机名字:通过下拉菜单选择相机,包括电脑摄像头和USB接口的CCD设备采集速率。采集速率:实时显示采集图像的速率。 缓冲数:实时显示从程序运行开始采集图像的数目。 设置采集时间:根据需求设置采集时间。默认值为0,只采一幅图像。 采集进行时间:程序已经运行的时间。 设置保存路径:指定图片的保存位置。如果不设置,只进行实时采集不保存图像。Stop:采集停止。 图像:显示图像信息。左侧为兴趣区域选择工具,作用是使研究区域更加醒目,便于观察。从上到下依次是: 实现图形的放大 显示鼠标位置,不进行其他操作 拖动图片 选择兴趣区为一点 选择兴趣区为矩形包围的区域,两边为水平和竖直
选择兴趣区为矩形包围的区域,矩形方向任意 选择兴趣区为折线 选择兴趣区为折线区域(所画折线自动闭合) 选择兴趣区为曲线 选择兴趣区为曲线保卫的区域 选择兴趣区为椭圆 选择兴趣区为圆环 以折线兴趣区域为例,如图 2.后面板(程序框图) 1. 循环,将采集、保存、计时等功能循环进行。 在循环中,获取最新的图像并输出。 2.循环的初始条件设置,选择相机,并将相机作为循环的输入。 和前面版里的相机名字相对应,作用是选择相机。 打开一个照相机,查询摄像机功能,装载的照相机的配置文件,并创建一个唯一的参考到摄像机。 Camera Control Mode照相机控制模式,在控制器模式打开相机,配置和获取图像数据。Session In指定要打开摄像机的名称,默认值是CAM0。 Session Out是相机的一个参考,输出图像数据。 配置并开始抓取图像,抓取循环连续进行,并将抓取到的图像放到缓冲区,可以实现高速图像采集。 Session In/out作用与打开相机里的类似。 3.循环结束时,关闭相机,若循环出错,则关闭相机并报错。 终止采集程序并关闭相机。 当有错误输入时,破坏图像,并释放它在存储器占据的空间。 4.将从相机采集到的数据,以图像的形式输出,并计算图像采集速率和采集数,在前面板输出。 5.在循环中计算采集速率和程序运行速率,控制采集时间。 本部分与stop按钮以及错误三者共同控制条件的运行,当三个条件中的任意一个为真时,循环都会终止。 显示从指定起始时间起,已经用去的时间,达到目标时间后会重置。“已用时间(s)”可以输出程序运行的时间。将已用时间与设置时间进行比较,当已用时间大于设置时间是条件为真,控制循环停止。 6.在特定的路径保存图像,并通过循环为其命名。
15个图像采集系统的经典设计应用案例
15个图像采集系统的经典设计应用案例 图像采集是视频信号处理系统的前端部分,正在向高速、高分辨率、高集成化、高可靠性方向发展。图像采集系统在当今工业、军事、医学各个领域都有着极其广泛的应用,如使用在远程监控、安防、远程抄表、可视电话、工业控制、图像模式识别、医疗器械等各个领域都有着广泛的应用。本文为大家介绍的是一些基于不同方案的图像采集系统的设计案例。 基于STM32的嵌入式双目图像采集系统设计 本文基于嵌入式的图像采集系统选择了意法半导体(ST)公司生产的 STM32F103ZET6芯片为主控芯片,FIFO结构的AL422B芯片实现图像数据缓存,SD卡实现图像存储以及四线制电阻触摸屏实现外部控制。实现通过OV7670双摄像头采集图像数据,经主芯片控制存储、显示。 基于TMS320F2812的视频图像采集系统的设计 本设计采用DSP的片上ADC实现图像采集,用DSP和CPLD搭建数据采集系统时,不必外接专业的图像采集芯片,避免了复杂的硬件设计,同时提供了足够的处理能力。本设计采用TI公司的TMS320F2812芯片采集图像,并搭建TMS320C6416t 处理图像,实现了基于DSP的视频图像采集。 基于FPGA的嵌入式图像采集系统设计 本文实现了一种基于CycloneII系列FPGA与视频信号处理芯片SAA7113H的嵌入式图像采集系统。系统结构简单、系统稳定、功耗低、成本低、速度快以及接口方便,可以满足视频监控系统等的需要。图像采集系统中采用FPGA作为采集控制部分,可以提高系统处理的速度及系统的灵活性和适应性,对于不同的视频图像信号,只要在FPGA内对控制逻辑稍作修改,便可实现信号采集。 基于CPLD的线阵CCD图像采集系统 介绍了一种基于CPLD的图像采集系统,详细论述了线阵CCD的驱动方法、图像信号的处理与传输,并给出了测试结果。此系统很好地完成了高速运动状态下的图像采集工作。 基于TMS320F206 DSP的图像采集卡设计方案 在利用电话线传输视频图像这一低比特率多媒体通信领域中,如果选用图像处理的专用芯片,都会使产品价格大幅度标升。本文介绍的采用TI公司的低档DSP 芯片TMS320F206和视频A/D芯片TLC5510的图像采集卡,则为低比特率多媒体通信提供了一个廉价的解决方案。 基于CCD星载相机图像采集电路设计与实现 本文中的CCD相机图像采集电路其CCD传感器接收前端光学系统的成像,偏压电路为CCD传感器提供必需的偏置电压,可编程逻辑器件产生的时序脉冲经过驱动电路对CCD进行控制采集,输出保护电路可对CCD进行有效地防护保护,预处理电路对CCD输出的带噪模拟信号进行处理后便于后续电路使用。
图像采集处理模块
1、图像采集处理 我们将OpenCV软件安装在安卓手机中,对手机拍照后的图像进行辨别处理以及定位处理,通过蓝牙模块,将信号传给单片机。 示意图: (1)、利用手机进行拍照、识别的原因: 我们查阅相关资料,找到了蓝牙助手v1.0这个软件,它是一款手机软件,实现了对于安卓手机蓝牙的基本操作以及安卓手机与单片机的通信。安装了次软件的安卓手机就可以借助HC-05蓝牙串口模块,控制单片机等系统,并可以接受从单片机等传送来的数据。 利用这个软件的原因是因为此软完成了蓝牙串口协议的设置,开发者使用时可以免去复杂的设置。 (2)、所用设备HC-05蓝牙串口 实物图:
模块与单片机的连接方式: 参数设置: 工作模式:从模式;波特率:9600bps;设备名称:HC-05;配对密码:1234,如按默认参数则无需以下个性设置。所有设置好的参数掉电都可保存): 1)、给模块提供合适的工作电源,带底板模块的工作电源为3.6~6V,不带底板核心模块为3.3V 2)、正确连接数据线,单片机的TXD和RXD必须与蓝牙模块的RXD,TXD交叉连接 进入AT命令模式有两种方法: a.蓝牙模块工作后拉高KEY脚电平进入AT模式1,LED状态为快闪,此时设置AT命令使用的波特率与通信时波特率一致,如通信时使用9600则此时设置AT命令的波特率
也应该选择9600 b.在模块上电的同时也令KEY脚为高电平,则进入AT模式2,LED状态为慢闪,固定使用38400,8,N,1的通信格式设置参数进入AT模式后只有保持KEY脚为高电平才能使用全部的AT命令。AT命令后面必须有回车换行符。如果使用SSCOM则在字符串输入框输入“AT”并勾选“发送新行”即可。 (3)、手机与蓝牙从机模块的连接及通信测试: 首先打开手机蓝牙,然后用手机的蓝牙管理程序扫描蓝牙设备,这时会找到蓝牙从机模块,然后进入蓝牙助手v1.0这个软件,在此软件中再次查询蓝牙从机模块,这时点击连接,会提示输入密码,例如模块初始配对码为1234。输入后,会提示配对未连接。此操作只要进行一次即可被手机记住,下次自动配对。因为蓝牙设备是串口设备,需要打开端口才可以连接,这时模块的灯还是闪烁的,当你打开端口后,灯才会变成连接成功状态。 下一步进行测试,在蓝牙助手v1.0中,输入字符后点击send,这时数据就会通过蓝牙发送到蓝牙模块,并从模块的TXD发出,此时单片机连接到模块的TXD-RXD进行数据通信了。 (4)、如何利用opencv软件进行物体的识别区分以及定位 识别特定的物体,可以用模板匹配的方法,大致说来就是先拍一张模板,再在图像里检测目标,模板匹配对比的是图像的像素值。 我们设想的具体方式为: 1)、在比赛前,分别拍摄架子上的物品(第一层和第二层),作为OpenCV图像库中的模版图像(patch);(其角度为正面照,若增强其区分的精确度,则可多角度完成一个物品的模版照) 2)在机器人启动前,我们将要拿去的东西输入进机器人; 3)、寻找一幅图像的匹配的模板,OpenCV已经为我们集成好了相关的功能,具体函数为matchTemplate; 4)、比赛时在现场分5次拍摄图像(每四个物品一次拍成),最中间无巡线部分,采用相隔1S的时间段的频率进行拍摄,知道拍摄出的图片物品在正中间即可,这就确定了物品的位置。 5)、接下来就是在所拍摄的图像中寻找和模板图像(patch)最相似的区域。OpenCV提供给我们的函数matchTemplate。该函数的功能为,在输入源图像Source image(I)中滑动框,寻找各个位置与模板图像Template image(T)的相似度,并将结果保存在结果矩阵result matrix(R)中。该矩阵的每一个点的亮度表示与模板T的匹配程度。然后可以通过函数minMaxLoc定位矩阵R中的最大值; 6)、手机根据找到的物体的位置,生成指令,并通过串口传递给单片机,最后机器人则针对匹配度最高的物品进行拿取操作。 通过查找资料,OpenCV的函数库中能够应用于匹配的方法有一下几种: CV_TM_SQDIFF 平方差匹配法,最好的匹配为0,值越大匹配越差 CV_TM_SQDIFF_NORMED 归一化平方差匹配法