自动控制原理 系统的频率响应和稳定性(三)
实验报告
( 2010/2011学年第一学期)
课程名称自动控制原理
实验名称自动控制根轨迹实验
系统的频率响应和稳定性
实验时间2010 年12 月 4 日指导单位
指导教师
学生姓名班级学号
学院(系) 自动化专业
3.0 实验目的
(1) 绘制并观察典型开环系统的Nyquist 围线。 (2) 绘制并观察典型开环系统的Bode 图。
(3) 运用Nyquist 准则判断闭环系统的稳定性。 (4) 初步掌握相关MATLAB 指令的使用方法。 3.1 预习要求
(1) 开环Nyquist 曲线、Bode 图的基本成图规律。 (2) 典型开环系统Nyquist 围线的成图规律。 (3) Nyquisi 原理和使用要领。
(4) 阅读和了解相关的MATLAB 指令。 3.2
实验内容
(必做内容)使用sisotool 交互界面研究典型开环系统的频率特性曲线,并进行闭环系统稳定性讨论。
以下各小题的要求:
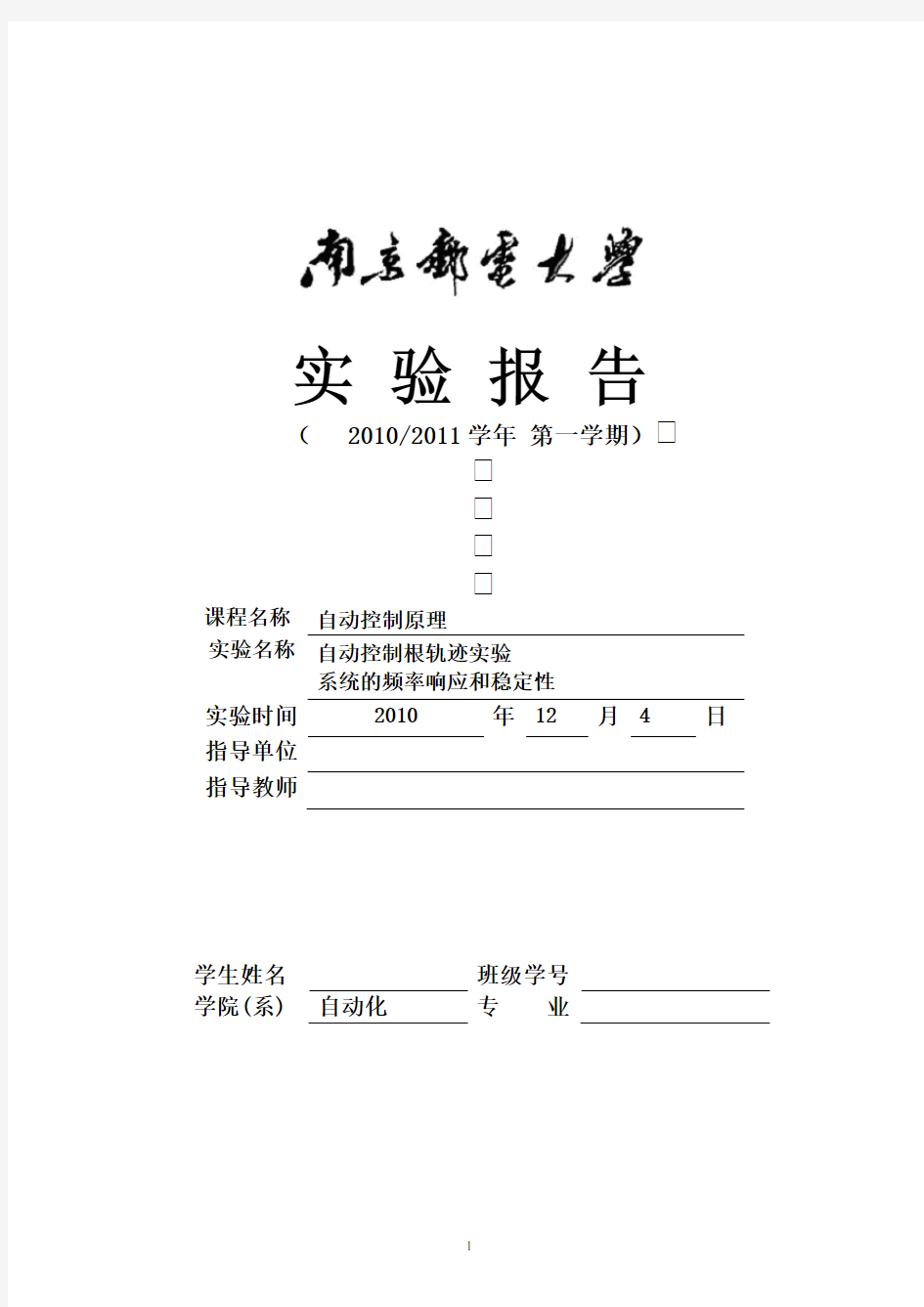
(A ) 根据所给开环传递函数的结构形式,绘制相应的幅相频率曲线和对数幅相频率
曲线。
(B ) 显示出曲线对应的开环传递函数具体表达式。
(C ) 假如MATLAB 指令绘制的幅相频率曲线不封闭,或用文字说明所缺部分曲线
的走向,或在图上加以添加所缺曲线;曲线与(-1,j0)点的几何关系应足够清晰,能支持判断结论的导出。
(D ) 对该开环函数构成的单位负反馈系统的稳定性作出判断,说明理由;假如闭环
不稳定,则应指出不稳定极点的数目。
(1) )
1)(1(211++=s T s T K
G ,其中K , T 1 , T 2 可取大于0的任意数。
)
1)(1(1
1++=s s G
(2)
)
1)(1)(1(3212+++=
s T s T s T K
G ,其中K , T 1 , T 2 , T 3 可取大于0的任意
)
1)(1)(1(1
2+++=
s s s G
(3) )
1(14+=
s T s K
G ,其中K , T 1 可取大于0的任意数。
)
1(1
4+=s s G
(4) )1)(1()
1(216+++=
s T s T s s T K G a ,其中。 K 可取大于0的任意数。
)
1)(1()
1(6+++=s s s s G
(5) )
1(127+=
s T s K
G ,其中K , T 1 可取大于0的任意数。
)
1(1
27+=s s G
(6) 112
8,)1()
1(T T s T s s T K G a a >++=,其中K 可取大于0的任意数 )
1()12(28++=s s s G
(7) 112
9,)1()
1(T T s T s s T K G a a <++=
,其中K 可取大于0的任意数。 )
12()1(29++=s s s G
(8) 2
10)
1)(1(s s T s T K G b a ++=
,其中K , T a , T b 可取大于0的任意数。
2
10)1)(1(s s s G ++=
3.3实验小结
(1)通过本次实验,掌握了绘制开环系统的Bode图以及Nyquist围线的方法。
(2)使用SISOTOOL交互界面,可以同时观察系统的根轨迹、Bode图以及Nyquist围线,从而判定闭环系统的稳定性。
(3)通过对图形的观察,更加生动形象地了解到系统稳定性的判定。
(4)二阶系统只有在极点都位于S平面的左半平面时才是稳定的,也可以通过Nyquist定理进行判断。
(5)通过本次实验,了解了相关的MATLAB指令。
绘制并观察典型开环系统的Nyquist围线。
连续系统零极点分布与频响特性的关系
连续系统零极点分布与频响特性的关系 班级:02 学号:2014210 请利用MATLAB软件绘制下列因果系统的零极点图和频率响应特性曲线,并分析系统的滤波特性。 (1) H1(s); 程序如下: close all b=[2]; a=([1 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -2,2]); figure; freqs(b,a); MATLAB绘制的零、极点图和频率响应特性曲线如图所示。
-2-1.5-1-0.5 00.511.52 Real Axis (seconds -1 ) I m a g i n a r y A x i s (s e c o n d s -1) -10 1 -80 -60-40-200 Frequency (rad/s) P h a s e (d e g r e e s ) 10 10 10 10 -0.7 10 -0.4 10 -0.1 Frequency (rad/s) M a g n i t u d e (2) H 2(s) ; 程序如下: close all b=[1 0]; a=([1 2]); SYS=tf(b,a); pzplot(SYS); axis([-4,4 -2,2]); figure; freqs(b,a); MATLAB 绘制的零、极点图和频率响应特性曲线如图所示。 零极点图 频率特性曲线图
Real Axis (seconds -1) I m a g i n a r y A x i s (s e c o n d s -1) 10 10 10 10 Frequency (rad/s) P h a s e (d e g r e e s ) 10 10 10 10 10 101010 Frequency (rad/s) M a g n i t u d e
自动控制原理答案
《自动控制原理》习题参考答案 第1章 1.7.2基础部分 1.答:开环控制如:台灯灯光调节系统。 其工作原理为:输入信号为加在台灯灯泡两端的电压,输出信号为灯泡的亮度,被控对象为灯泡。当输入信号增加时,输出信号(灯泡的亮度)增加,反之亦然。 闭环控制如:水塔水位自动控制系统。 其工作原理为:输入信号为电机两端电压,输出信号为水塔水位,被控对象为电机调节装置。当水塔水位下降时,通过检测装置检测到水位下降,将此信号反馈至电机,电机为使水塔水位维持在某一固定位置增大电机两端的电压,通过调节装置调节使水塔水位升高。反之亦然。 2.答:自动控制理论发展大致经历了几个阶段: 第一阶段:本世纪40~60年代,称为“经典控制理论”时期。 第二阶段:本世纪60~70年代,称为“现代控制理论”时期。 第三阶段:本世纪70年代末至今,控制理论向“大系统理论”和“智能控制”方向发展。 3.答:开环控制:控制器与被空对象之间只有正向作用而没有反馈控制作用,即系统的输 出量与对控制量没有影响。 闭环控制:指控制装置与被空对象之间既有正向作用,又有反向联系控制的过程。 开环控制与闭环控制的优缺点比较: 对开环控制系统来说,由于被控制量和控制量之间没有任何联系,所以对干扰造成的误差系统不具备修正的能力。 对闭环控制系统来说,由于采用了负反馈,固而被控制量对于外部和内部的干扰都不甚敏感,因此,有不能采用不太精密和成本低廉的元件构成控制质量较高的系统。 4.答:10 线性定常系统;(2)非线性定常系统; (3)非线性时变系统;(4)非线时变系统; 1.7.3 提高部分 1.答:1)方框图: 2)工作原理:假定水箱在水位为给定值c(该给定值与电位器给定电信ur对应),此时浮子处于平衡位置,电动机无控制作用,水箱处于给定水位高度,水的流入量与流出量保持不变。当c增大时,由于进水量一时没变浮子上升,导致c升高,给电信计作用后,使电信计给电动机两端电压减小,电动机带动减齿轮,使控制阀开度减小,使进水量减小,待浮
控制系统的校正研究——频率响应法
论文题目:控制系统的校正研究——频率响应法 专业: 电子信息工程专业 姓名:签名:________ 指导老师:签名: ________ 摘要 摘要:近年来,自动控制系统在如今的工业和生活中,起着越来越重要的作用。所以,据用户要求的性能指标进行自动控制系统的串联校正设计有很重要的现实意义。对于给定的线性定常系统,通常通过加入串联超前、滞后或超前滞后综合校正装置,以达到提高系统的精度和稳定性的目的。该文分别给出基于频率特性法串联校正的具体设计方法,应用MATLAB对系统进行通用程序设计,并对实例进行仿真。仿真实例结果表明了此设计方法的有效性和实用性。 【关键词】:自动控制系统;频率响应法;MATLAB;伯德图 【论文类型】:理论研究型
Title:Correction of control system——Frequency response method Major: Electronic & Information Engineering Name:Signature: Supervisor:Signature: In recent years, automatic control systems play an increasingly important role in today's industrial and domestic.Therefore, the performance according to user requirements for the automatic control system series correcting design has a very important practical significance. For a given linear time-invariant systems, usually by joining the series ahead of lag or lead and lag correction device, in order to achieve the purpose to improve the accuracy and stability of the system. This paper gives specific design series based on the frequency characteristics correction, MATLAB system for generic programming, and simulation instance. The simulation results show the effectiveness and practicality of this design method. 【key word】:Automatic control system;Frequency response method,MATLAB;Bode diagram 【Type of Thesis】:Theory research
自动控制原理试题及答案
自动控制原理 一、简答题:(合计20分, 共4个小题,每题5分) 1. 如果一个控制系统的阻尼比比较小,请从时域指标和频域指标两方面 说明该系统会有什么样的表现?并解释原因。 2. 大多数情况下,为保证系统的稳定性,通常要求开环对数幅频特性曲 线在穿越频率处的斜率为多少?为什么? 3. 简要画出二阶系统特征根的位置与响应曲线之间的关系。 4. 用根轨迹分别说明,对于典型的二阶系统增加一个开环零点和增加一 个开环极点对系统根轨迹走向的影响。 二、已知质量-弹簧-阻尼器系统如图(a)所示,其中质量为m 公斤,弹簧系数为k 牛顿/米,阻尼器系数为μ牛顿秒/米,当物体受F = 10牛顿的恒力作用时,其位移y (t )的的变化如图(b)所示。求m 、k 和μ的值。(合计20分) F ) t 图(a) 图(b) 三、已知一控制系统的结构图如下,(合计20分, 共2个小题,每题10分) 1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调 节时间s t 和峰值时间p t ; 2) 当()21(),()4sin3r t t n t t =?=时,求系统的稳态误差。
四、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。 1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。 2) 计算超调量%σ和调节时间s t 。(合计20分, 共2个小题,每题10分) [ 1 %0.160.4( 1)sin σγ =+-, 1s t ?= 五、某火炮指挥系统结构如下图所示,()(0.21)(0.51) K G s s s s = ++系统最 大输出速度为2 r/min ,输出位置的容许误差小于2o ,求: 1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量; 2) 前向通路中串联超前校正网络0.41 ()0.081 c s G s s +=+,试计算相位裕量。 (合计20分, 共2个小题,每题10分) L ()/ -20 5c
系统频率特性
第三章 系统频率特性 系统的时域分析是分析系统的直接方法,比较直观,但离开计算机仿真,分析高阶系统是困难的。系统频域分析是工程广为应用的系统分析和综合的间接方法。频率分析不仅可以了解系统频率特性,如截止频率、谐振频率等,而且可以间接了解系统时域特性,如快速性,稳定性等,为分析和设计系统提供更简便更可靠的方法。 本章首先阐明频率响应的特点,给出计算频率响应的方法,接着介绍Nyquist 图和Bode 图的绘制方法、系统的稳定裕度及系统时域性能指标计算。 3.1 频率响应和频率特性 3.1.1 一般概念 频率响应是指系统对正弦输入的稳态响应。考虑传递函数为G(s)的线性系统,若输入正弦信号 t X t x i i ωsin )(= (3.1-1) 根据微分方程解的理论,系统的稳态输出仍然为与输入信号同频率的正弦信号,只是其幅值和相位发生了变化。输出幅值正比于输入的幅值i X ,而且是输入正弦频率ω的函数。输出的相位与i X 无关,只与输入信号产生一个相位差?,且也是输入信号频率ω的函数。即线性系统的稳态输出为 )](sin[)()(00ω?ωω+=t X t x (3.1-2)
由此可知,输出信号与输入信号的幅值比是ω的函数,称为系统的幅频特性,记为)(ωA 。输出信号与输入信号相位差也是ω的函数,称为系统的相频特性,记为)(ω?。 幅频特性: )()()(0ωωωi X X A = (3.1-3) 相频特性: )()()(0ω?ω?ω?i -= (3.1-4) 频率特性是指系统在正弦信号作用下,稳态输出与输入之比对频率的关系特性,可表示为: )()()(0ωωωj X j X j G i = (3.1-5) 频率特性)(ωj G 是传递函数)(s G 的一种特殊形式。任何线性连续时间系统的频率特性都可由系统传递函数中的s 以ωj 代替而求得。 )(ωj G 有三种表示方法: )()()(ω?ωωj e A j G = (3.1-6) )()()(ωωωjV U j G += (3.1-7) )(sin )()cos()()(ω?ωωωωjA A j G += (3.1-8) 式中,实频特性: )(cos )()(ω?ωωA U = 虚频特性:
线性控制系统的频率响应分析
一.实验目的 1.了解和掌握对数幅频曲线和相频曲线(波德图)、幅相曲线(奈奎斯特图)的构造及绘制方法。 2.二阶开环系统中的相位裕度和幅值穿越频率的计算。 二.实验内容及要求 1.一阶惯性环节的频率特性曲线测试。 2.二阶开环系统的频率特性测试,研究表征系统稳定程度的相位裕度和 幅值穿越频率对系统的影响。 三、实验主要仪器设备和材料 1.labACT自控/计控原理实验机一台 2.数字存储示波器一台 四、实验方法、步骤及结果测试 1.一阶惯性环节的频率特性曲线 惯性环节的频率特性测试模拟电路见图4-1。 图4-1 惯性环节的频率特性测试模拟电路 实验步骤:注:‘S ST'不能用“短路套”短接! (1)将数/模转换器(B2)输出OUT2作为被测系统的输入。 (2)按图4-1安置短路套及测孔联线。 (3)运行、观察、记录: ①运行LABACT程序,选择自动控制菜单下的线性控制系统的频率响应分析-实验项目,选择一阶系统,再选择开始实验,点击开始,实验机将自动产生0.5Hz~64Hz多个频率信号,测试被测系统的频率特性,等待将近十分钟,测试结束。 ②测试结束后,可点击界面下方的“频率特性”选择框中的任意一项进行切换,将显示被测系统的对数幅频、相频特性曲线(伯德图)和幅相曲线(奈 奎斯特图),同时在界面上方将显示点取的频率点的L、、Im、Re等相关数
据。如点击停止,将停止示波器运行,不能再测量数据。 ③分别改变惯性环节开环增益与时间常数,观察被测系统的开环对数幅频曲线、相频曲线及幅相曲线,在幅频曲线或相频曲线上点取相同的频率点,测量、记录数据于实验数据表中。 实验数据表1:改变惯性环节开环增益,(T=0.05,C=1u,R2=50K) 实验数据表2: 改变惯性环节时间常数, K=1(R1=50K、R2=50K) 2.二阶开环系统的频率特性曲线 二阶系统模拟电路图的构成如图4-2所示。
自动控制原理试卷及答案
课程名称: 自动控制理论 (A/B 卷 闭卷) 一、填空题(每空 1 分,共15分) 1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。 2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。 3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω , 阻尼比=ξ , 该系统的特征方程为 , 该系统的单位阶跃响应曲线为 。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为 。 6、根轨迹起始于 ,终止于 。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系统的开环传递函数为 。 8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。 二、选择题(每题 2 分,共20分) 1、采用负反馈形式连接后,则 ( ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( ) A 、稳定; B 、单位阶跃响应曲线为单调指数上升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。 4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )
自动控制原理
自动控制原理 知识要点与习题解析 第2章 控制系统的数学模型 数学模型有多种表现形式:传递函数、方框图、信号流图等。 ; ; )()()()(t e t c t n t r )()()()()()(s s s s s H s G en n e ΦΦΦΦ; P32 (自动控制原理p23) 2-17 P33 解: (e) 42 32121123 211)(G H G G H G G H G G G G s ++-+= Φ; P37 (p73) 2-21 试绘制与题2-21图中系统方框图对应的信号流图,并用梅森增益公式求传递函数C (s )/R (s ) 和误差传递函数E (s )/R (s ) 注:P21(2) 依据系统方框图绘制信号流图 首先确定信号流图中应画出的信号节点,再根据方框图表明的信号流向,用支路及相应的传输连接信号节点。步骤如下, (a)系统的输入为源点,输出为阱点; (b)在方框图的主前向通路上选取信号节点,即相加点后的信号和有分支点的信号,两信号是同一个 题2-21图 系统方框图 题2-1 7图 控制系统方框图 题2-17解图 控制系统简化方框图
信号时只作为一个节点; (c)其它通路上,仅反馈结构求和点后的信号选作节点; (d)最后,依据信号关系,用支路连接这些节点。 解:图(a)信号流图如题2-21解图(a)所示。 计算C (s )/R (s )和E (s )/R (s )过程中,关于回路和特征式的计算是完全相同,可统一计算。 回路 111H G L -=,232H G L -=,213213H H G G G L -=; 特征式 21312132123111H H G G H H G G G H G H G ++++=?。 计算C (s )/R (s ): 前向通路 3211G G G P =,342G G P =; 特征子式 11=?,1121H G +=?; 2 131223111134321)1(1) 1()()(H H G G G H G H G H G G G G G G s R s C ++++++=; 计算E (s )/R (s ): 前向通路 11=P ;21342H H G G P -=; 特征子式 2311H G +=?,12=?; 2 131223112 13423)1(11)()(H H G G G H G H G H H G G H G s R s E ++++-+=; P38 (p73) 2-22 试用梅森增益公式求题2-22图中各系统信号流图的传递函数)(/)(s R s C 。 解:(b) 6543211G G G G G G P =,654372G G G G G P =,6813G G G P =,68174G G H G P -=; 121H G L -=,242H G L -=,363H G L -=,45434H G G G L -=, 4185H H G L =,56543216H G G G G G G L -=,5654377H G G G G G L -=, 56818H G G G L -=,568179H G G H G L =; 3219282523231219 11L L L L L L L L L L L L L L L L i i -++++++-=?∑=; 11=?,12=?,24431H G +=?=?; ? ++++=)1)(()()(244321H G P P P P s R s C ; 题2-21解图 系统信号流图 题2-22图 系统信号流图
自动控制原理与系统
自动控制原理与系统,第三版 第一章自动控制系统概述 填空 1.所谓自动控制,就是在没有人直接参与的情况下,利用控制装置,对生产过程等进行自 动调节与控制,使之按照预定的方案达到要求的指标。(1.1) 2.18世纪瓦特(Watt)利用小球离心调速器使蒸气机转速保持恒定。(1.1) 3.若系统的输出量不被引回来对系统的控制部分产生影响,这样的系统称为开环控制系 统。(1.2) 4.若系统的输出量通过反馈环节返回来作用于控制部分,这样的系统称为闭环控制系统。 (1.2) 5.反馈信号与输入信号的极性相同则称为正反馈。(1.3) 6.恒值控制系统的特点是输入量是恒量,并且要求系统的输出量相应地保持恒定。(1.4) 7.随动系统的特点是输入量是变化着的,并且要求系统的输出量能跟随输入量的变化而作 出相应的变化。(1.4) 8.自动控制系统的性能通常是指系统的稳定性、稳态性能和动态性能。(1.5) 9.控制系统的动态指标通常用最大超调量、调整时间和振荡次数来衡量。(1.5) 10.经典控制理论是建立在传递函数概念基础之上的。(1.6) 11.现代控制理论是建立在状态变量概念基础之上的。(1.6) 单选 1.在自动控制系统的性能指标中,最重要的性能是() (1.5) 动态性能稳定性稳态性能快速性 双选 1.若系统的输出量通过反馈环节返回来作用于控制部分,这样的系统称为() (1.2) 开环控制系统闭环控制系统前馈控制系统反馈控制系统复合控制系统2.开环控制系统的适用场合是() (1.2) 系统的扰动量影响不大系统的扰动量大且无法估计控制精度达不到预期要求系统未设反馈环节系统的扰动量可以预计并能进行补偿 3.闭环控制系统的适用场合是() (1.2) 系统的扰动量影响不大控制精度达不到预期要求系统未设反馈环节 系统的扰动量大系统的扰动量可以预计并能进行补偿 4.自动控制系统按输入量变化的规律可分为恒值控制系统和() (1.4) 连续控制系统伺服系统过程控制系统离散控制系统时变系统 5.自动控制系统按系统的输出量和输入量间的关系可分为() (1.4) 连续控制系统离散控制系统线性系统非线性系统定常系统 6.恒值控制系统是最常见的一类自动控制系统,例如() (1.4) 火炮控制系统自动调速系统雷达导引系统刀架跟随系统水位控制系统
(实验三)连续时间LTI系统的频域分析汇总
实验三 连续时间LTI 系统的频域分析 一、实验目的 1、掌握系统频率响应特性的概念及其物理意义; 2、掌握系统频率响应特性的计算方法和特性曲线的绘制方法,理解具有不同频率响应特性的滤波器对信号的滤波作用; 3、学习和掌握幅度特性、相位特性以及群延时的物理意义; 4、掌握用MA TLAB 语言进行系统频响特性分析的方法。 基本要求:掌握LTI 连续和离散时间系统的频域数学模型和频域数学模型的MATLAB 描述方法,深刻理解LTI 系统的频率响应特性的物理意义,理解滤波和滤波器的概念,掌握利用MATLAB 计算和绘制LTI 系统频率响应特性曲线中的编程。 二、实验原理及方法 1 连续时间LTI 系统的频率响应 所谓频率特性,也称为频率响应特性,简称频率响应(Frequency response ),是指系统在正弦信号激励下的稳态响应随频率变化的情况,包括响应的幅度随频率的变化情况和响应的相位随频率的变化情况两个方面。 上图中x(t)、y(t)分别为系统的时域激励信号和响应信号,h(t)是系统的单位冲激响应,它们三者之间的关系为:)(*)()(t h t x t y =,由傅里叶变换的时域卷积定理可得到: )()()(ωωωj H j X j Y = 3.1 或者: ) () ()(ωωωj X j Y j H = 3.2 )(ωj H 为系统的频域数学模型,它实际上就是系统的单位冲激响应h(t)的傅里叶变换。即 ? ∞ ∞ --= dt e t h j H t j ωω)()( 3.3 由于H(j ω)实际上是系统单位冲激响应h(t)的傅里叶变换,如果h(t)是收敛的,或者说 是绝对可积(Absolutly integrabel )的话,那么H(j ω)一定存在,而且H(j ω)通常是复数,
第四章控制系统的频率特性
第四章控制系统的频率特性 本章要点 本章主要介绍自动控制系统频域性能分析方法。内容包括频率特性的基本概念,典型环节及控制系统Bode图的绘制,用频域法对控制系统性能的分析。 用时域分析法分析系统的性能比较直观,便于人们理解和接受。但它必须直接或间接地求解控制系统的微分方程,这对高阶系统来说是相当复杂的。特别是当需要分析某个参数改变对系统性能的影响时,需反复重新计算,而且还无法确切了解参数变化量对系统性能影响的程度。而频率特性不但可以用图解的方法分析系统的各种性能, 而且还能分析有关参数对系统性能的影响,工程上具有很大的实用意义。 第一节频率特性的基本概念 一、频率特性的定义 频率特性是控制系统的又一种数学模型,它是系统(或元件)对不同频率正弦输入信号的响应特性。对线性系统,若输入信号为正弦量,则其稳态输出信号也将是同频率的正弦量,但是输出信号的幅值和相位一般不同于输入量,如图4-1。 若设输入量为r(t)=A「sin( 3 t+ u r) 其输出量为c(t)=A c sin@ t+ u c) 若保持输入信号的幅值A r不变,改变输入信号的角频率3,则输出信号的角频率 也变化,并且输出信号的幅值和相位也随之变化。 图4-1控制系统的频率响应
我们定义系统(或环节)输出量与输入量幅值之比为幅值频率 特性,简称幅频 M( 3 )表示。输出量与输入量的相位差为相位频率特 3变化,常用U (3 )表示。其数学定义为 M "A U ( 3 )= U c - U 幅频特性和相频特性统称为频率特性,用 G(j 3 )表示。由此,幅频特性 M( 3 )又可 表示为|G(j ;i ),相频特性u (3 )又可表示为Z G(j ■),三者可表示成下面的形式: G(j a )=|G(j m )|Z G(j s ) M (co ) = G(jco) 「()二/G( j ?) 二、频率特性与传递函数的关系 频率特性和传递函数之间存在密切关系:若系统(或元件)的传递函数为 G(s), 则其频率特性为 G(j 3 )。这就是说,只要将传递函数中的复变量 s 用纯虚数j 3代替, 就可以 得到频率特性。即 G(s) > G(j ■) 三、频率特性的表示方法 1 .数学式表示法 频率特性是一个复数,所以它和其他复数一 | 样,可以表示为极坐标式、直角坐标和指数坐标 三种形式。见图 4-2所示。 G(j ?)二 G(j J- G(j ) 二U (■) jVC ) -M ( )e j () 显然, M =|G( j ⑷)| 2 (co )+V 2?) w G(j "arcta 说 例4-1写出惯性环节的幅频特性、相频特性和频率特性。 特性,它随角频率 3变化,常用 性,简称相频特性,它也随角频率 其中 图4-2频率特性的表示方法
自动控制原理模拟题及答案
学习中心 姓 名 学 号 电子科技大学网络与继续教育学院 《自动控制原理》模拟试题一 一、简答题(共25分) 1、简述闭环系统的特点,并绘制闭环系统的结构框图。( 8分) 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。( 10分) 3、串联校正的特点及其分类?( 7分) 二、已知某单位负反馈系统的开环传递函数为) 42()(2++=s s s K s G K ,试确定使系 统产生持续振荡的K 值,并求振荡频率ω。( 15分) 三、设某系统的结构及其单位阶跃响应如图所示。试确定系统参数,1K 2K 和a 。( 15分) 四、某最小相角系统的开环对数幅频特性如图示。要求(20分) 1)写出系统开环传递函数; 2)利用相角裕度判断系统的稳定性;
3)将其对数幅频特性向右平移十倍频程,试讨论对系统性能的影响。 五、设单位反馈系统的开环传递函数为 ) 1()(+= s s K s G 试设计一串联超前校正装置,使系统满足如下指标:(25分) (1)在单位斜坡输入下的稳态误差151 实验报告 实验项目名称:运用Matlab进行连续时间信号卷积运算 (所属课程:信号与系统) 学院:电子信息与电气工程学院 专业: 10电气工程及其自动化 姓名: xx 学号: 201002040077 指导老师: xxx 一、实验目的 1、学会运用MATLAB 分析连续系统的频率特性。 2、掌握相关函数的调用。 二、实验原理 1、一个连续LTI 系统的数学模型通常用常系数线性微分方程描述,即 )()()()()()(01 )(01)(t e b t e b t e b t r a t r a t r a m m n n +'++=+'++ (1) 对上式两边取傅里叶变换,并根据FT 的时域微分性质可得: )(])([)(])([0101ωωωωωωE b j b j b R a j a j a m m n n +++=+++ 101)()()()()(a j a j a b j b j b j E j R j H n n m m ++++++==ωωωωωωω H ( j ω )称为系统的频率响应特性,简称系统频率响应或频率特性。一般H ( j ω )是复函数,可表示为: )()()(ω?ωωj e j H j H = 其中, )(ωj H 称为系统的幅频响应特性,简称为幅频响应或幅频特性;)(ω?称为系统的相频响应特性,简称相频响应或相频特性。H ( j ω )描述了系统响应的傅里叶变换与激励的傅里叶变换间的关系。H ( j ω )只与系统本身的特性有关,与激励无关,因此它是表征系统特性的一个重要参数。 MATLAB 信号处理工具箱提供的freqs 函数可直接计算系统的频率响应的数值解,其语句格式为:H=freqs(b,a,w)其中,b 和a 表示H ( j ω )的分子和分母多项式的系数向量;w 为系统频率响应的频率范围,其一般形式为w1:p:w2,w1 为频率起始值,w2 为频率终止值,p 为频率取值间隔。 H 返回w 所定义的频率点上系统频率响应的样值。注意,H 返回的样值可能为包含实部和虚部的复数。因此,如果想得到系统的幅频特性和相频特性,还需要利用abs 和angle 函数来分别求得。 自动控制原理及系统仿 真课程设计 学号:1030620227 姓名:李斌 指导老师:胡开明 学院:机械与电子工程学院 2013年11月 目录 一、设计要求 (1) 二、设计报告的要求 (1) 三、题目及要求 (1) (一)自动控制仿真训练 (1) (二)控制方法训练 (19) (三)控制系统的设计 (23) 四、心得体会 (27) 五、参考文献 (28) 自动控制原理及系统仿真课程设计 一:设计要求: 1、 完成给定题目中,要求完成题目的仿真调试,给出仿真程序和图形。 2、 自觉按规定时间进入实验室,做到不迟到,不早退,因事要请假。严格遵守实验室各项规章制度,实验期间保持实验室安静,不得大声喧哗,不得围坐在一起谈与课程设计无关的空话,若违规,则酌情扣分。 3、 课程设计是考查动手能力的基本平台,要求独立设计操作,指导老师只检查运行结果,原则上不对中途故障进行排查。 4、 加大考查力度,每个时间段均进行考勤,计入考勤分数,按照运行的要求给出操作分数。每个人均要全程参与设计,若有1/3时间不到或没有任何运行结果,视为不合格。 二:设计报告的要求: 1.理论分析与设计 2.题目的仿真调试,包括源程序和仿真图形。 3.设计中的心得体会及建议。 三:题目及要求 一)自动控制仿真训练 1.已知两个传递函数分别为:s s x G s x G +=+= 22132)(,131)( ①在MATLAB中分别用传递函数、零极点、和状态空间法表示; MATLAB代码: num=[1] den=[3 1] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) num=[2] den=[3 1 0] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) 仿真结果: num =2 den =3 1 0 Transfer function: 2 --------- 3 s^2 + s 第三章 系统频率特性 系统的时域分析是分析系统的直接方法,比较直观,但离开计算机仿真,分析高阶系统是困难的。系统频域分析是工程广为应用的系统分析和综合的间接方法。频率分析不仅可以了解系统频率特性,如截止频率、谐振频率等,而且可以间接了解系统时域特性,如快速性,稳定性等,为分析和设计系统提供更简便更可靠的方法。 本章首先阐明频率响应的特点,给出计算频率响应的方法,接着介绍Nyquist 图和Bode 图的绘制方法、系统的稳定裕度及系统时域性能指标计算。 3.1 频率响应和频率特性 3.1.1 一般概念 频率响应是指系统对正弦输入的稳态响应。考虑传递函数为G(s)的线性系统,若输入正弦信号 t X t x i i ωsin )(= (3.1-1) 根据微分方程解的理论,系统的稳态输出仍然为与输入信号同频率的正弦信号,只是其幅值和相位发生了变化。输出幅值正比于输入的幅值i X ,而且是输入正弦频率ω的函数。输出的相位与i X 无关,只与输入信号产生一个相位差?,且也是输入信号频率ω的函数。即线性系统的稳态输出为 )](sin[)()(00ω?ωω+=t X t x (3.1-2) 由此可知,输出信号与输入信号的幅值比是ω的函数,称为系统的幅频特性,记为)(ωA 。输出信号与输入信号相位差也是ω的函数,称为系统的相频特性,记为)(ω?。 幅频特性: )()()(0ωωωi X X A = (3.1-3) 相频特性: )()()(0ω?ω?ω?i -= (3.1-4) 频率特性是指系统在正弦信号作用下,稳态输出与输入之比对频率的关系特性,可表示为: )()()(0ωωωj X j X j G i = (3.1-5) 频率特性)(ωj G 是传递函数)(s G 的一种特殊形式。任何线性连续时间系统的频率特性都可由系统传递函数中的s 以ωj 代替而求得。 )(ωj G 有三种表示方法: )()()(ω?ωωj e A j G = (3.1-6) )()()(ωωωjV U j G += (3.1-7) )(sin )()cos()()(ω?ωωωωjA A j G += (3.1-8) 式中,实频特性: )(cos )()(ω?ωωA U = 虚频特性: 实验二连续时间系统的频率响应 37022613 张士龙 一、实验目的 1、加深对连续时间系统频率响应理解; 2 、掌握借助计算机计算任意连续时间系统频率响应的方法。 二、实验原理 连续时间系统的频率相应可以直接通过所得的表达式计算,也可以通过零极点图通过几何的方法来计算,而且通过零极点图可以迅速的判断系统的滤波特性。 1、在S平面上标出系统的另几点位置: 2、选择S平面的坐标原点为起点,沿虚轴向上移动,计算此时各极点和零点与该点的模和夹角: 3、与所有零点的模相乘,再除以各极点模,得到对应频率出的幅频特性值; 4、将所有零点的幅角相加,减去各极点的幅角,得到对应频率处的相角。 三、实验内容 1、流程图 2、源程序 #include int z=0,p=0; float temp=0; printf("please input the zero point's number:"); scanf("%d",&z); printf("please input the zero point's real part:"); for(i=0;i 频率响应介绍_频率响应概念 频率响应是指将一个以恒电压输出的音频信号与系统相连接时,音箱产生的声压随频率的变化而发生增大或衰减、相位随频率而发生变化的现象,这种声压和相位与频率的相关联的变化关系称为频率响应。也是指在振幅允许的范围内音响系统能够重放的频率范围,以及在此范围内信号的变化量称为频率响应,也叫频率特性。在额定的频率范围内,输出电压幅度的最大值与最小值之比,以分贝数(dB)来表示其不均匀度。频率响应在电能质量概念中通常是指系统或计量传感器的阻抗随频率的变化。 频率响应确定方法分析法基于物理机理的理论计算方法,只适用于系统结构组成易于确定的情况。在系统的结构组成给定后,运用相应的物理定律,通过推导和计算即可定出系统的频率响应。分析的正确程度取决于对系统结构了解的精确程度。对于复杂系统,分析法的计算工作量很大。 实验法频率响应图册采用仪表直接量测的方法,可用于系统结构难以确定的情况。常用的实验方式是以正弦信号作为试验信号,在所考察的频率范围内选择若干个频率值,分别测量各个频率下输入和稳态输出正弦信号的振幅和相角值。输出与输入的振幅比值随频率的变化特性是幅频特性,输出与输入的相角差值随频率的变化特性是相频特性。 频率响应性能系统的过渡过程与频率响应有着确定的关系,可用数学方法来求出。但是除一阶和二阶系统外,这样做常需要很多时间,而且在很多情况下实际意义不大。常用的方法是根据频率响应的特征量来直接估计系统过渡过程的性能。频率响应的主要特征量有:增益裕量和相角裕量、谐振峰值和谐振频率、带宽和截止频率。 增益裕量和相角裕量它可提供控制系统是否稳定和具有多大稳定裕量的信息。 谐振峰值Mr和谐振频率rMr和r规定为幅频特性|G(j)|的最大值和相应的频率值。对于具有一对共轭复数主导极点(见根轨迹法)的高阶线性定常系统,当Mr值在(1.0~1.4)M0范围内时,可获得比较满意的过渡过程性能。其中M0是=0时频率响应的幅值。r的大小表征过渡过程的快速性:r值越大,系统在单位阶跃作用下输出响应的快速性越好。带宽和截止频率截止频率c规定为幅频特性|G(j)|达到0.7M0并继续下降时的临界频率。 学习中心 姓 名 学 号 西安电子科技大学网络与继续教育学院 《自动控制原理》模拟试题一 一、简答题(共25分) 1、简述闭环系统的特点,并绘制闭环系统的结构框图。( 8分) 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。( 10分) 3、串联校正的特点及其分类?( 7分) 二、已知某单位负反馈系统的开环传递函数为) 42()(2++=s s s K s G K ,试确定使系 统产生持续振荡的K 值,并求振荡频率ω。( 15分) 三、设某系统的结构及其单位阶跃响应如图所示。试确定系统参数,1K 2K 和a 。( 15分) 四、某最小相角系统的开环对数幅频特性如图示。要求(20分) 1)写出系统开环传递函数; 2)利用相角裕度判断系统的稳定性; 3)将其对数幅频特性向右平移十倍频程,试讨论对系统性能的影响。 五、设单位反馈系统的开环传递函数为 ) 1()(+= s s K s G 试设计一串联超前校正装置,使系统满足如下指标:(25分) (1)在单位斜坡输入下的稳态误差151 实验二连续时间系统的频率响应 39022622龚小川 一.实验目的: 1. 进一步加深对连续时间系统频率响应理解; 2.掌握借助计算机计算任意连续时间系统频率响应的方法。 二.实验原理 1.本实验的基本内容就是将系统函数的幅频特性曲线以及相频特性曲线给画出来。 而系统函数∏∏==--= n i i m j j p s z s K s H 1 1 ) ) (()(,令jw s =,则∏∏==--= n i i m j j p jw z jw K jw H 1 1 ) ) (()( ∑∑∏∏∏∏======-==?=∑∑=?=-=-==n i i m j j n i i m j j w j n i j i m j j j j i i j j j w M N K jw H e jw H e M e N K jw H e M p jw e N z jw n i i m j j i j 1 1 1 1) (1 ] [ 1] [ )(,)()()(,1 1 θψ??θψθψ 即(1)计算所有零点模之积及极点模之积,两者之商即为)(s H 的幅度; (2)计算所有零点相角之和及极点相角之和,两者之差即为)(s H 的相角。 2.通过零极点图通过几何的方法来计算,而且通过零极点图可以迅速地判断系统的滤波特性。 通过零极点图进行计算的方法是: (1)在S 平面上标出系统的零极点位置; (2)选择S 平面的坐标原点为起始点,沿虚轴向上移动,计算此时各极点和零点 与该点的膜和夹角; (3)将所有零点的模相乘,再除以各极点的模,得到对应频率处的幅频特性的值;(4)将所有零点的幅角相加,减去各极点的幅角,得到对应频率处的相角。 三.实验流程图连续时间LTI系统的频率特性及频域分析
自动控制原理及系统仿真课程设计
第三章 系统频率特性
实验二-连续时间系统的频率响应
频率响应介绍_频率响应概念
自动控制原理模拟题及答案
实验二 连续时间系统的频率响应