捷能样本p5-6
GP6参数Microsoft Word 文档

最佳视距:≥10m
最佳视角:水平±80度,垂直±45度
环境温度:存贮-35℃~+85℃工作-20℃~+50℃
驱动器件:采用LED专用驱动器件聚积IC5020
驱动方式:恒流驱动,1/8扫描
刷新频率:400HZ
单元板结构:灯驱一体
相对湿度:≤90~95%
单元板接口:08
工作电压:直流5V±10%
平均功耗:12W/单元板
最大功耗:≤18W/单元板
连续工作无故障时间:1000小时
寿命:1星雨LED控制系统
控制方式:同步控制,HUB板:高128点,宽256点
配套
屏体
每平方单元板数:54块
每平方电源(5V40A)数:5个
每平方数平均功耗:648W
每平方数最大功耗:972W
宽32点高16波长亮度产地封装618628nm250610mcdplcc452025nm630956mcdplcc447025nm140568mcdplcc4物理分辨率
显示屏技术参数(
1.1) LED
P 6表贴三合一
项目
技术指标参数:
像素管单元板
物理点间距:6mm
物理密度:27777点/m2
发光亮度:2000cd-2200cd/m2
单元板尺寸:192mm×96mm
单元板分辨率:宽32点×高16点
像素1R1PG1PB
晶片
波长
亮度
产地
封装
红
晶元
618-628nm
250-610mcd
PLCC4
绿
仕蓝
520+/_2.5nm
630-956mcd
PLCC4
蓝
SGN GP 48Y0270 000 标签组件说明书
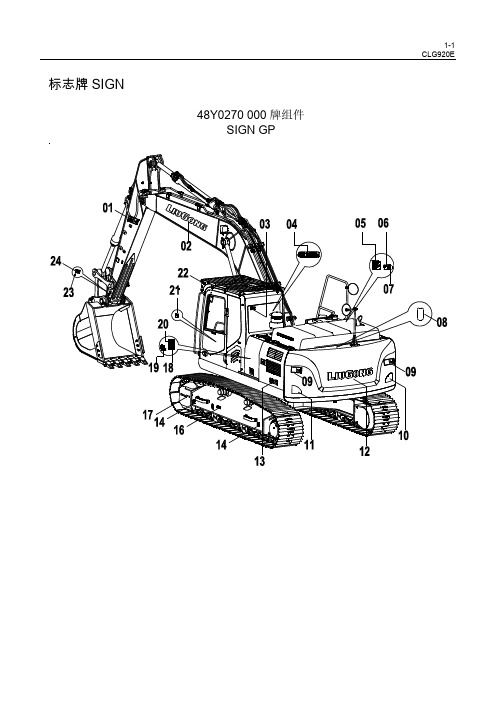
34E0139 005 回转平台总成
REVOLVING FRAME AS
件号 ITE M
部件号 PART NO.
1 34E0139(A)
2 34E0称
回转平台总成 (A) 回转平台总成 (B)
PART NAME
REVOLVING FRAME AS(A) REVOLVING FRAME AS(B)
铭牌 铭牌 噪声标贴 上下机器警告标志 右标贴 蓄能器注意标志 加燃油安全标志 警告标志 柴油标志 警告标志 警告标志 电瓶危险标志 安全标贴 触碰警告标志 安全标志 警告标志 警告标志 操作注意标志 电源安全标志 自动怠速警告标志 警告标志
PART NAME
数量 Q'T Y
服务 代码 S.C
PIN NAMEPLATE 1
PART NAME
WASHER WASHER BOLT SCREW MOUNTING SUPPORT HOLDER REARVIEW MIRROR WASHER REAR MIRROR BLOCK STAY NUT HANDRAIL WASHER BOLT
数量 Q'T Y
服务 代码 S.C
适用机号 SERIAL NO.
18 74A4420 001 润滑图
19 74A4470 000 标贴组件
20 74A1271 000 润滑维护示意图
21 74A4043 000 标贴 22 10A8534 001 铭牌 23 01B0012 000 铆钉 24 10A5048 005 铭牌 25 74A3161 001 安全标贴 26 74A3082 000 冷却液安全标志 27 74A4459 000 标贴 28 74A3090 000 安全标贴 29 74A6903 001 噪声标贴 30 74A3094 000 前窗注意标志 31 74A1837 000 操纵示意图
信捷科技电子 XC 系列可编程序控制器 说明书(xc 1_xc3_xc5_xcm)

3-1.可编程控制器的各种软元件.......................................................................................................... 35 3-2.软元件编号一览表.......................................................................................................................... 37 3-3.可编程控制器的数据处理.............................................................................................................. 39 3-4.软元件的一些编码原则.................................................................................................................. 40 3-5.定时器的编号和功能[T]................................................................................................................. 42 3-6.计数器的编号和功能[C] ................................................................................................................ 44 3-7.注意事项 ......................................................................................................................................... 47
RT8296AHZSP 评估板用户指南说明书

RT8296AHZSPEvaluation BoardPurposeThe RT8296A is a high-efficiency current mode synchronous step-down regulator that can deliver up to 3A output current from a wide input voltage range of 4.5V to 23V. This document explains the function and use of the RT8296A evaluation board (EVB) and provides information to enable operation and modification of the evaluation board and circuit to suit individual requirements.Table of ContentsPurpose (1)Introduction (2)General Product Information (2)Key Performance Summary Table (3)Bench Test Setup Conditions (4)Headers Description and Placement (4)Test Points (4)Power-up & Measurement Procedure (5)Output Voltage Setting (5)Schematic, Bill of Materials and Board Layout (6)EVB Schematic Diagram (6)Bill of Materials (7)EVB Layout (8)Other Technical Information (10)IntroductionGeneral Product InformationGeneral DescriptionThe RT8296A is a high efficiency, monolithic synchronous step-down DC/DC converter that can deliver up to 3A output current from a 4.5V to 23V input supply. The RT8296A's current mode architecture and external compensation allow the transient response to be optimized over a wide range of loads and output capacitors. Cycle-by-cycle current limit provides protection against shorted outputs and soft-start eliminates input current surge during start-up. The RT8296A also provides output under voltage protection and thermal shutdown protection. The low current (<3μA) shutdown mode provides output disconnection, enabling easy power management in battery-powered systems. The RT8296A is available in an SOP-8 (Exposed Pad) package.Features●±1.5% High Accuracy Feedback Voltage● 4.5V to 23V Input Voltage Range●3A Output Current●Integrated N-MOSFET Switches●Current Mode Control●PWM Frequency Operation : 340kHz●Output Adjustable from 0.8V to 20V●Up to 95% Efficiency●Programmable Soft-Start●Stable with Low-ESR Ceramic Output Capacitors●Cycle-by-Cycle Over Current Protection●Input Under Voltage Lockout●Output Under Voltage Protection●Thermal Shutdown ProtectionKey Performance Summary TableKey features Evaluation board number: PCB004_V1 Default Input Voltage 12VMax Output Current 3ADefault Output Voltage 3.3VDefault Marking & Package Type RT8296AHZSP, PSOP-8 (Exposed Pad)Operation Frequency Steady 340kHz at PWMOther Key Features 4.5V to 23V Input Voltage RangeProgrammable Soft-StartPSM/ PWM Auto SwitchedProtection Output Under-Voltage Protection (hiccup mode):Cycle-by-cycle Current LimitThermal ShutdownBench Test Setup ConditionsHeaders Description and PlacementPlease carefully inspect the EVB IC and external components, comparing them to the following Bill of Materials, to ensure that all components are installed and undamaged. If any components are missing or damaged during transportation, please contact the distributor or ***********************************.Test PointsThe EVB is provided with the test points and pin names listed in the table below.Test point/ Pin name SignalComment (expected waveforms or voltage levels on testpoints)VIN Input voltage Input voltage range= 4.5V to 23VVOUT Outputvoltage Default output voltage = 3.3VOutput voltage range= 0.8V to 20V(see ‘’ Output Voltage Setting’’ section for changing output voltagelevel)SW Switching node test point SW waveformEN Enable test point Enable signal. EN is automatically pulled high (by R4) to enableoperation. Connect EN low to disable operation.BS Boot strap supply test point Floating supply voltage for the high-side N-MOSFET switchSS Soft-start control test point Soft start waveformGND Ground GroundPower-up & Measurement Procedure1. Apply a 12V nominal input power supply (4.5V < V IN < 23V) to the VIN and GND terminals.2. The EN voltage is pulled to logic high by R4 (100kΩ to VIN) to enable operation. Drive EN high (>2.7V) toenable operation or low (<0.4V) to disable operation.3. Verify the output voltage (approximately 3.3V) between VOUT and GND.4. Connect an external load up to 3A to the VOUT and GND terminals and verify the output voltage and current.Output Voltage SettingSet the output voltage with the resistive divider (R1, R2) between VOUT and GND with the midpoint connected to FB. The output is set by the following formula:OUT R1V = 0.8 x (1 + )R2The installed VOUT capacitors (C4, C5) are 22μF, 16V X5R ceramic types. Do not exceed their operating voltage range and consider their voltage coefficient (capacitance vs. bias voltage) and ensure that the capacitance is sufficient to maintain stability and provide sufficient transient response for your application. This can be verified by checking the output transient response as described in the RT8296 IC datasheet.Schematic, Bill of Materials and Board LayoutEVB Schematic DiagramTP4C1, C2: 10μF/50V/X5R, 1206, TDK C3216X5R1H106KC4, C5: 22μF/16V/X5R, 1210, Murata GRM32ER61C226KL1: 10μH TAIYO YUDEN NR8040T100M, DCR=34mΩBill of MaterialsReference QtyPart numberDescriptionPackage ManufactureU1 1 RT8296AHZSP DC-DC Converter PSOP-8 Richtek C1, C22C3216X5R1H106K160AB10uF/±10%/50V/X5R Ceramic Capacitor 1206 TDKC4, C5 2 GRM32ER61C226KE20#22uF/±10%/16V/X5R Ceramic Capacitor1210 MurataC7 1 0603B332K5003.3nF/±10%/50V/X7RCeramic Capacitor0603 WALSINC3, C6, C10,C114C1608X7R1H104K080AA0.1uF/±10%/50V/X7R Ceramic Capacitor 0603 TDK C8,C9,C12,C13 0Not Installed0603L1 1 NR8040T100M10uH/3.1A/±20%,DCR=34m Ω, Inductor 8mmx8mmx4mm TAIYO YUDENR1 1 75k Ω/±1%, Resistor 0603 R2 1 24k Ω/±1%, Resistor 0603 R3 1 13k Ω/±1%, Resistor 0603 R4 1 100k Ω/±1%, Resistor0603R5 0 Not Installed 0603 D1, D2Not InstalledTP 4 Test Pin GP 4Golden PinEVB LayoutTop View (1st layer)Bottom View (2nd Layer)Component Placement Guide—Component Side (1st layer)PCB Layout—Component Side (1st Layer)Component Placement Guide—Bottom Side (2nd layer)PCB Layout—Bottom Side (2nd layer)Other Technical InformationF or more information, please find the related datasheet or application notes from the Richtek website。
LTP使用说明
LTP工具说明1LTP测试套件 (3)1.1简介 (3)1.2源目录结构 (3)2LTP安装 (4)2.1下载 (4)2.2编译 (4)2.3安装说明 (5)3LTP测试套件结构说明 (6)3.1概述 (6)3.2目录介绍 (6)3.3LTP执行原理 (6)4LTP测试套件测试内容 (7)4.1LTP测试套件测试内容 (7)4.1.1commands (7)4.1.2kernel (7)4.1.3kdump (8)4.1.4network (8)4.1.5realtime (8)4.1.6open_posix_testsuite (8)4.1.7misc (8)4.2测试方法说明 (8)4.2.1commands模块内容描述及实现方法 (8)4.2.2kernel (10)4.2.3network (15)4.2.4open_posix_testsuite (17)4.2.5realtime (18)5LTP测试套件配置详细 (19)5.1networktests.sh脚本配置 (19)5.2networkstress.sh配置 (23)5.3open_posix_testsuite测试套件 (28)5.4realtime配置 (29)5.5mm脚本的配置 (30)5.6io脚本配置 (30)5.7filecaps的配置 (30)5.8tpm_tools的配置 (31)5.9tcore的配置 (31)5.10io_floppy的配置 (31)5.11io_cd 的配置 (32)5.12cpuhotplug的配置 (32)5.13adp.sh的配置 (33)5.14autofs1.sh和autofs4.sh的配置 (34)5.15exportfs.sh的配置 (34)5.16isofs.sh的配置 (34)5.17ltpdmmapper.sh的配置 (35)5.18ltpfslvm.sh的配置及要求 (36)5.19ltpfsnolvn.sh的配置及要求 (36)5.20ltp-scsi_debug.sh的配置及要求 (37)5.21sysfs.sh的配置及要求 (37)5.22rpctirpc的配置及要求 (37)5.23test_selinux.sh的配置及要求 (39)5.24smack的配置和要求 (40)5.25perfcounters的配置及要求 (41)5.26can的配置及要求 (41)5.27test_robind.sh的配置 (42)6LTP测试套件使用说明 (43)6.1概述 (43)6.2测试方法 (44)6.2.1初始测试 (44)6.2.2压力测试 (47)1LTP测试套件1.1简介LTP(Linux Test Project)是SGI、IBM、OSDL和Bull合作的项目,目的是为开源社区提供一个测试套件,用来验证Linux系统可靠性、健壮性和稳定性。
标准型安全性能综合AN9640WRK1156六合一安规综合测试仪

标准型安全性能综合AN9640WRK1156六合一安规综合测试仪标准型安全性能综合AN9640WRL022893RK1156六合一安规综合测试仪RL023807图片型号:RL022893型号:RL023807标准型安全性能综合AN9640WRL022893RK1156六合一安规综合测试仪RL023807内容型号:RL022893★国际化安规标准:满足GB4706.1-2005等国内外安规标准测试;符合JJG795-2004、JJG984-2004、JJG843-2007、JJG690-2003安规计量检定规程要求;★测试迅速:以ARM7TDMI内核的微控制器为核心,测试通道实时捕获被测设备在测试过程中各参数变化情况,几秒钟内准确完成一项测试,最短在十秒内完成全部项目测试(耐压、绝缘、接地、泄漏、功率、启动六项测试),能满足生产线对测试时间的要求;★输出方式先进:摒弃了传统仪表自耦变压器调节输出信号的方法,采用正弦脉宽调制(SPWM)技术产生50Hz或60Hz标准正弦波,经大功率MOS管驱动输出,实现了高电压和大电流的无触点调节,大大提高了仪器的可靠性;★运行可靠:本系列测试仪整机线路采用了多种抗干扰措施,抗干扰能力强;同时具有硬件和软件保护,运行安全可靠;★操作简单:本系列测试仪采用背光式液晶显示屏,光线柔和,清晰度高,受环境光线影响小;中文菜单提示操作步骤,光标指示,简明易懂;全屏显示测试结果,多组测试条件记忆,能方便地实现多种电器机型的测试;★使用安全:自动过压、过流保护,使用更加安全;★智能判别:可设定电压、电流下限判定,消除产品漏检;对产品测试失败,进行智能分析,声光报警。
各类家电生产制造商,以及进行家电安全规范检测认证的机构,科研院所型号:RL023807\输出电压交流200~5000V 耐压测试prefix = o输出电压误差±(设定值*2%+3V)击穿电流测量0.02~20mA范围±(测量值*3%+3V)击穿电流测量精度时间设置范围1~300秒绝输出电压直流200~1000V(注:范文素材和资料部分来自网络,供参考。
深度解析动力电池系统冲击振动测试

深度解析动力电池系统冲击振动测试敬天爱人和谐共存杭州捷能科技有限公司是一家致力于动力电池系统研发、生产、销售和服务为一体,以及动力电池梯次利用的创新型高科技公司关注捷能科技,掌握最新资讯、最新技术、行业动态对于客户来说,购买新能源汽车考虑的重要因素之一就是安全。
在电池包的开发过程中,如何确保其在质保期内安全可靠?该问题的答案是个系统工程,需要电芯设计、BMS研发、结构设计、安全策略、质量控制等各个方面协同努力才能达成。
企业为了确保自己的产品能够做到安全可靠,都会根据新国标做一系列的测试,在产品送到客户手中之前,测试成为企业检验自己产品的最后一道关口。
在这里简单描述一下新国标测试项目之振动和冲击。
机械冲击测试的目的是评价在加速、减速、车轮掠过有凹坑或者石头路面等工况下的电池包机械结构强度。
随机振动测试的目的主要是模拟汽车行驶时,路面的凹凸不平造成Pack经历这种随机振动的载荷工况时的疲劳寿命。
如何进行测试,需要关注哪些参数,如何判定结构是否通过测试?在冲击&振动之前做一个温度冲击测试,主要是检验箱体的焊接位,及螺栓扭力在温度冲击过程中受到的损伤程度,相当于测试前的准备工作。
由于测试过程中,不允许开箱(有严重异常除外),扫频成为评估结构是否发生破坏的检验方法,在每个方向冲击振动之前,会进行扫频,扫频是为了检验样品的固有频率,如果某个方向测试完成后,测试前后固有频率偏差值在10HZ以内,则认为可以往下进行,大于10Hz则需要开箱检查,视Pack受到的损伤程度,判断是否继续测试。
如下图所示,绿色为冲击前的扫频曲线,红色是冲击后的扫频曲线,黑色为振动后的扫频曲线,可知冲击完后,结构主频下降了3Hz,随机振动完后主频继续下降了7Hz,结合实际的经验来看,结构是Ok的,可以继续做其他方向的测试。
测试完成之后,需要对扭力进行测定,在生产组装时,会对箱体内的每个螺栓打一个固定的扭力值,同时以红线标注,这个扭力值视为初始扭力值,测试前后开箱确认红线偏移量与扭力值保持率,保持率<>此外,气密性、绝缘电阻、电压温度采样等也是需要进行测试以便对比测试前后的数据,判定产品是否合格。
LA917-6 产品手册说明书

LA917-6 产品手册匯出日期:2023-11-15修改日期:2023-08-09•••••关于本手册感谢您购买本公司的机器人产品。
本手册记载了正确安装使用机器人所需注意的事项。
安装使用该机器人系统前,请仔细阅读本手册与其他相关手册。
阅读之后,请妥善保管,以便随时取阅。
禁止擅自复印或转载本手册的部分或全部内容。
本手册记载的内容将来可能会随时变更,恕不事先通告。
如您发现本手册的内容有误或需要改进亦或补充之处,请不吝指正。
除本手册中有明确陈述之外,本手册中的任何内容不应解释为本公司对个人损失、财产损坏或具体适用性等做出的任何担保或保证。
本公司对因使用本手册及其中所述产品而引起的意外或间接伤害不负责。
手册内容本手册包含以下说明:机器人的安装 机器人的使用 机器人的维护阅读对象本手册面向:安装人员维护人员保修本机器人及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。
(有关保修期事项,请咨询您所在区域的销售人员。
)但在以下情况下,将对客户收取修理费用(即使在保修期内):1. 因不按照手册内容错误的使用以及使用不当而导致的损坏或故障。
2. 客户未经授权进行拆卸导致的故障。
3. 因调整不当或未经授权进行修理而导致的损坏。
4. 因地震、洪水等自然灾害导致的损坏。
警告1. 如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保修无效。
2. 本公司对产品使用而导致的任何故障或事故,甚至是人身伤害或死亡均不承担任何责任。
3. 本公司不可能预见所有可能的危险与后果。
因此,本手册不能警告用户所有可能的危险。
垂询方式有关机器人的修理/检查/调整等事项,请与本公司售后部门联系。
未记载售后部门时,请与当地销售商联系。
为节约您的时间,联系前请事先准备好下述各项:- 控制器名称/序列号- 机器人名称/序列号- 软件名称/版本- 系统出现的问题••••••••••••••••••••••••••••••••••••••••••••••••••1 目录目录安全关于本章安全术语安全标识风险说明安全特性什么是紧急停止使能开关工作中的安全事项概述关注自身安全操作示教器从急停状态恢复手动模式的安全事项自动模式的安全事项紧急情况处理产品概述机器人系统概述机器人负载能力机器人功能及预订用途手臂基本原理以及应用的主要技术机器人本体概述技术规范规格参数工作空间输出法兰电箱规格安装环境条件现场安装搬运安装机械接口电器连接电缆连接接地说明用户配线IO 接线定义功能测试上电前检查上电异常检查检查机器人原点和各轴方向、软极限自动运行测试程序维护关于维护时的安全故障处理维护计划检查间隔与检查项目内六角螺钉的紧固•••••••••更换电池更换润滑油同步带的维护四轴同步带维护五/六轴同步带维护零点关于机械零点零点标定标定步骤••••••••••2 安全2.1 关于本章说明此章说明安全使用机器人需遵守的内容,在使用机器人之前,请务必详读此章内容。