金属塑性加工原理 - Chapter 1A 数学与力学基础(1hr) - for printer
《金属塑性成形原理》课程讲义1
第一章 绪论一 课程简介《金属塑性成形原理》是材料成形与控制工程的一门专业理论基础课,研究金属塑性变形时在金属学和力学等方面遵循的共同基础和规律,阐明金属在塑性成形时的共性,即金属塑性成形原理是研究和探讨金属在各种塑性加工中可遵循的基础和规律,其目的在于科学地、系统地掌握金属塑性加工过程中遵循的基础和规律,为学习后续的工艺课程作理论基础,也为合理制定塑性成形工艺规范及选择设备、设计模具奠定理论基础。
金属塑性成形是金属加工的方法之一。
它是在外力作用下,利用其塑性使其成形并获得一定力学性能、形状和尺寸的零件和毛坯的加工方法。
随着冲压工艺、模锻工艺及模具技术的迅速发展,在现代工业生产中,冲压工艺、模锻工艺在航空、兵工、汽车、拖拉机、电器、电子、仪表及日用品生产中应用十分广泛,占有很重要的地位。
模具已经成为生产各种工业产品不可缺少的重要工艺装备,在国民经济中占用重要的地位。
二 金属的塑性及塑性成形1. 金属的塑性2. 塑性成形金属材料在外力作用下,利用其塑性使其成形并获得一定力学性能、形状和尺寸的零件和毛坯的加工方法。
三 金属塑性成形特点与金属切削、铸造、焊接等加工方法相比,金属塑性成形具有以下优点:(1)经过塑性加工,金属的组织、性能得到改善和提高金属在塑性加工过程中,往往要经过锻造、轧制、或者挤压等工序,这些工序使得金属的结构更加致密、组织得到改善、性能得到提高。
对于铸造组织,这种效果更加明显。
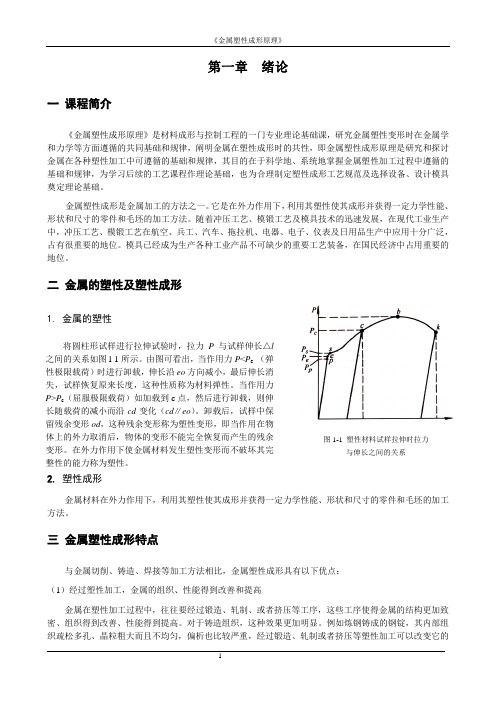
例如炼钢铸成的钢锭,其内部组织疏松多孔、晶粒粗大而且不均匀,偏析也比较严重,经过锻造、轧制或者挤压等塑性加工可以改变它的将圆柱形试样进行拉伸试验时,拉力P 与试样伸长△l之间的关系如图l-1所示。
由图可看出,当作用力P <P e (弹性极限载荷)时进行卸载,伸长沿eo 方向减小,最后伸长消失,试样恢复原来长度,这种性质称为材料弹性。
当作用力P >P c (屈服极限载荷)如加载到c 点,然后进行卸载,则伸长随载荷的减小而沿cd 变化(cd ∥eo )。
金属塑性成形原理
塑性成形
一次加工
块料成形
(体积成 形,锻造)
二次加工
轧制
挤压 冶金厂 拉拔
自由锻 锻造厂
模锻
板料成形 (冲压)
分离工序 成形工序
冲裁 落料 弯曲
拉深
.
13
□ 块料成形(体积成形) 块料成形是在塑性成形过程中靠体积转
移和分配来实现的。可分为一次加工和二次 加工。 ◇ 一次加工
这是属于冶金工业内的原材料生产的加工 方法,可提供棒材、板材、管材、线材等。 包括轧制、挤压和拉拔等。
一般分为分离工序和成形工序两类。 ◇ 分离工序
分离工序是在冲压过程中使冲压零件与板 料沿一定的轮廓线相互分离。包括落料、冲孔、 切断、切边等。
.
20
△ 落料 用冲模沿封闭轮廓线冲切,冲下部分是零
件。
△ 冲孔 用冲模沿封闭轮廓线冲切,冲下部分是废
料。
.
21
△ 切断
用剪刀或冲模沿不封闭轮廓线切断,多用 于加工形状简单的平板零件。
正挤
反挤
复合 挤
挤压原理示意图
.
16
△ 拉拔:拉拔是在金属坯料的前端施加一定的 拉力,将金属坯料通过模孔使其产生塑性变 形,以获得与模孔形状、尺寸相同的小截面坯 料的塑性成形方法。
拉拔原理示意图
.
17Βιβλιοθήκη ◇ 二次加工 为机械制造工业领域内提供零件或坯料的
加工方法。包括自由锻和模锻,统称为锻造。 △ 自由锻:自由锻是在锻锤或水压机上,利用
1)增加应变速率会使金属的真实应力升 高,这是由于塑性变形的机理比较复杂,需要 有一定的时间来进行。流动应力升高会使金属 的塑性降低。
2)增加应变速率,由于没有足够的时间进 行回复或再结晶,因而软化过程不充分而使金 属的塑性降低。
塑性力学知识点

《塑性力学及成形原理》知识点汇总第一章绪论1.塑性的基本概念2•了解塑性成形的特点第二章金属塑性变形的物理基础1.塑性和柔软性的区别和联系2.塑性指标的表示方法和测量方法3.磷、硫、氮、氢、氧等杂质元素对金属塑性的影响4.变形温度对塑性的影响;超低温脆区、蓝脆区、热脆区、高温脆区的温度范围补充扩展:1.随着变形程度的增加,金属的强度硬度增加,而塑性韧性降低的现象称为:加工硬化2.塑性指标是以材料开始破坏时的塑性变形量来表示,通过拉伸试验可以的两个塑性指标为:伸长率和断面收缩率3.影响金属塑性的因素主要有:化学成分和组织、变形温度、应变速率、应力状态(变形力学条件)4.晶粒度对于塑性的影响为:晶粒越细小,金属的塑性越好5.应力状态对于塑性的影响可描述为(静水压力越大):主应力状态下压应力个数越多,数值越大时,金属的塑性越好6.通过试验方法绘制的塑性一一温度曲线,成为塑性图第三章金属塑性变形的力学基础第一节应力分析1.塑性力学的基本假设2.应力的概念和点的应力状态表示方法3.张量的基本性质4.应力张量的分解;应力球张量和应力偏张量的物理意义;应力偏张量与应变的关系5.主应力的概念和计算;主应力简图的画法J i TJ公式(3-14)应力张量不变量的计算J2=-®x b y+b y<!z+bF x)*Xy+Y z+l Zx2 2 2 J^-\-^z - 2 xy*zx-(=yz Vy zx,;xy)公式(3-15)应力状态特征方程O' 3 一2_ J 2b 一 J 3 = 0(当已知一个面上的应力为主应力时,另外两个主应力可以采用简便计算公式(3-35) 的形式计算)6. 主切应力和最大切应力的概念计算、 1公式(3-.25).最大切应力-max ^(匚max -二min )7. 等效应力的概念、特点和计算任意坐标系中公式(3- 31a ) = I 、(;「x -^y )2 •(二y8. 单元体应力的标注;应力莫尔圆的基本概念、画法和微分面的标注 9. 应力平衡微分方程第二节应变分析1 .塑性变形时的应变张量和应变偏张量的关系及其原因 2. 应变张量的分解,应变球张量和应变偏张量的物理意义 2. 对数应变的定义、计算 和特点,对数应变与相对线应变的关系 3. 主应变简图的画法 3. 体积不变条件公式(3- 55)用线应变-= 0 ;用对数应变(主轴坐标系中)r 亠二2 i 3=04 .小应变几何方程xex 公式(3- 66) ^ = —; yzycw站 ;二—; Z - , ZX一Z第三节 平面问题和轴对称问题-;「2 ) '2 -3)'("」3 -1)= 3J 2-z)2 -(二 z -;「x )2 6( Xy ;z •:)xyyx2 cy ex y2 czcy仝J (兰.吕 xz2 ex cz 主轴坐标系中 公式(3- 31)3 V.2 81 .平面应变状态的应力特点;纯切应力状态的应力特点、单元体及莫尔圆公式(3-86) CT z =石2 =舟(W 十也)=CT m 第四节屈服准则1 .四种材料的真实应力应变曲线 2. 屈雷斯加屈服准则公式(3-96) T max=^ = K3. 米塞斯屈服准则公式(3)0(). ®x _<!y )2 十(<!y _6)2 +(— _6)2 十6(玩";z "ZX ) =2 箱 2 =6K 2(□-二2)2 (二2 -二3)2 (二3 -二 1)2 =2打=6K 24 .两个屈服准则的相同点和差别点5 . ;「1 -匚3 - -;「s ,表达式中的系数1的取值范围第五节塑性变形时应力应变关系1 .塑性变形时应力应变关系特点 2. 应变增量的概念,增量理论公式(3- 125) 唱=仃詁丸公式(3- 129) d 上三⑺ J )] ; d xy=3^ xy22 -d ;y 二仝[;「y -2匚 6)] ; d yz 二弓仝 yza 2 2 ad 呂 1 丄 v 3 d s d ;z[6 -;Lx ;「y )] ; d zx zxcr 2 23 .比例加载的定义及比例加载须满足的条件第六节塑性变形时应力应变关系公式(3- 102)1 .真实应力应变曲线的类型第四章金属塑性成形中的摩擦1 •塑性成形时摩擦的特点和分类; 摩擦机理有哪些?影响摩擦系数的主要因素 2. 两个摩擦条件的表达式3•塑性成形中对润滑剂的要求;塑性成形时常用的润滑方法第五章塑性成形件质量的定性分析1. 塑性成形件中的产生裂纹的两个方面2. 晶粒度的概念;影响晶粒大小的主要因素及细化晶粒的主要途径3. 塑性成形件中折叠的特征第六章滑移线场理论简介1. 滑移线与滑移线场的基本概念;滑移线的方向角和正、负号的确定2. 平面应变应力莫尔圆中应力的计算;匚x 二一 K sin 2公式(7-1) a y =cr m +K sin 2oxy= K cos2 ■3. 滑移线的主要特性;亨盖应力方程公式(7-.5).二 ma -Sb »2K 「ab4. 塑性区的应力边界条件;滑移线场的建立练习题一、应力01-1的单元体和应力莫尔圆,并标注微分面。
《塑性加工原理》课程考试大纲

《塑性加工原理》课程考试大纲
一、基本描述
课程名称:塑性加工原理(Principles of Plasticity Process)
学分: 3
学时:48 (课内实验(践):上机:课外实践:)
适用专业:材料成型及控制工程及相关专业
开课单位:冶金工程学院材料成型及控制工程系
课程负责人:陈继平
教材与主要参考书目:金属塑性变形与轧制理论赵志业冶金工业出版社2008年3月
金属塑性加工学——轧制理论与工艺王廷溥,齐克敏冶金工业出版社2012年4月内容概述:塑性成型原理是材料成型及控制工程专业的专业基础必修课,主要阐述金属塑性加工方式之一轧制的变形基础和金属流动规律,探讨轧制变形过程的金属在变形区内的流动规律和变形规律以及轧制力能参数的计算方法、弹塑性变形行为以及连轧理论等。
本课程主要教学内容包括轧制过程的宽展和前滑后滑、轧制压力、轧制力矩和轧机主电机功率、轧制时轧件的塑性曲线和轧机的弹性曲线以及连轧的特殊规律及张力的自动调节作用等连轧理论。
通过本课程的学习,使学生系统掌握轧制过程的基本概念、轧制过程中的基本现象及其变化规律,初步具备应用分析实际问题的能力和工程计算能力。
二、考核要求和教学内容重、难点
(考核要求:A—重点考核;B—一般考核;C—了解)
三、考核方式
试卷考核
四、大纲编写的依据与说明
根据专业培养目标及教学计划,综合该课程权威体系编写。
起草人:陈继平审核人:曹燕日期:。
塑性加工原理1

2. 提高金属塑性的基本途径 (1)提高材料成分和组织的均匀性 (2)合理选择变形温度和应变速率 (3)选择三向压缩性较强的变形方式 挤压、开式模锻、自由锻 (4)减少变形的不均匀性
二、塑性加工过程受力分析
1.正压力的分析要点 正压力是指工具与工件接触面上的垂直作 用力。
注意:塑性变形过程中接触面的变化以及约 束 面上存在着的反压力。同时注意塑性变形 整个过程中的受力, 而不是仅关注瞬时的受力。
不利的一面: a. 增加能量消耗 b. 改变应力状态,增加变形抗力,影响 金属流动性及其充填过程 c. 引起变形不均匀 d. 加剧模具的磨损,降低了模具的寿命
(3)描述接触面上摩擦的数学模型 a. 库仑定律: = µ —摩擦应力 µ —摩擦系数 —摩擦面上的正应力 b. 常摩擦力假设 =mK m—摩擦因子,取值0~1 K—金属的屈服剪切强度
2.摩擦力的分析要点 (1)塑性加工过程中摩擦的特点 a. 伴随有变形金属的塑性流动 b. 各处摩擦力方向可能不同 c. 接触面上压强高 d. 真实接触面积大 e. 不断有新的摩擦面产生 f. 常在高温下发生摩擦
(2)摩擦对塑性加工过程的影响 有利的一面:轧制咬入、开式模锻金 属充填、板料拉深防裂
一、金属在塑性加工过程中 的塑性行为
• • • • • • 1. 影响金属塑性的因素: (1)金属的化学成分和组织 (2)变形温度 (3)应变速率 (4)变形力学条件: 应力状态:在主应力状态下,压应力个 数越多、数值越大,金属的塑性越好。
应变状态:压缩应变有利于塑性的发挥, 拉伸应变对塑性不利。
金属塑性加工
•绪 论
•塑性加工原理 •塑性加工工艺
绪
论
• 金属塑性加工的定义、特点、 应用状况 • 金属塑性加工分类 • 本章目的及内容
金属属性成型原理(塑性力学)

金属属性成型原理(塑性力学)金属塑性成型原理(塑性力学)金属冷态下的塑性变形机理:1、晶内变形的变形方式类似单晶体为滑移(主要的)和孪生(次要的)。
滑移总是沿着原子密度最大的晶面和晶向发生。
滑移系=滑移面×滑移方向。
滑移过程中晶体由于受到外界作用而发生转动,其结果是使原来任意取向的各个晶粒逐渐调整其方位而趋于一致。
滑移过程的实质就是位错的移动和增殖过程。
滑移方向的作用大于滑移面的作用,所以体心立方晶格(例如α-Fe)的塑性不如面心立方晶格(例如γ-Fe)。
孪生:晶体在切应力作用下,晶体的一部分沿着一定的晶面(孪生面)和一定的晶向(孪生方向)发生均匀切边。
以何种方式进行塑性变形,取决于哪种方式变形所需的切应力为低。
2、晶间变形的主要形式是晶粒之间相互滑动和转动。
晶间变形是晶界附近具有一定厚度的区域内发生应变的结果。
多晶体在冷态下的塑变主要是晶内变形,晶间变形只起次要作用,而且需要其它变形机制相协调。
位错塞积群会产生很强的应力场,它越过晶界走用在相邻晶粒上,使其也具有位错趋势。
理论上,为保持变形的连续性,每个晶粒至少要求有五个独立的滑移系启动。
多晶体塑变的特点:1、各晶粒变形的不同时性;2、各晶粒变形的相互协调性;3、晶粒与晶粒之间和晶粒内部与晶界附近区域直接按变形的不均匀性。
晶粒越细小,金属屈服强度越大,ζs=ζ0+K y d-1/2,其塑性也越好。
粗晶粒材料冲压时易出现表面凸凹不平(桔皮现象)。
材料经回火或长期存放后,拉伸时再次出现屈服现象,称为应变时效。
屈服效应会使板料出现粗糙不平(吕德思带),是一种外观缺陷,预防方法是在拉延前进行一道微量(1-2%压下量)冷轧工序,以使被溶质碳原子钉扎的位错大部分脱钉。
另一方法是在钢种加入少量钛、铝等强碳化物、氮化物形成元素,它们与碳、氮稳定结合,以减少碳、氮对位错的钉扎作用。
多相合金可以分为两种:一类为聚合型两相合金(例如碳钢中的铁素体和粗大渗碳体),另一类是弥散分布型两相合金(例如钢种细小的渗碳体微粒分布在铁素体机体上)。
金属塑性加工原理
金属塑性加工原理
金属塑性加工原理是指在适当的工艺条件下,通过施加外力使金属材料发生塑性变形的过程。
金属塑性加工原理的基础是金属的塑性特性,即金属材料在受力作用下能够发生可逆的形状变化。
金属塑性加工原理涉及到金属材料的结晶学、力学性能和变形机制等方面的知识。
在金属塑性加工中,通过外力的作用,原材料的形状和尺寸可发生变化,实现所需的加工目标。
金属塑性加工原理主要可以归纳为以下几个方面:
1. 金属材料的结晶学:金属材料由多个晶粒组成,晶粒内部有晶界,而晶界是塑性变形的主要路径。
在金属的塑性加工过程中,晶粒的滑移和再结晶是主要的塑性变形机制。
2. 应力和变形:金属在受力作用下,原子间的键合力会发生改变,使得晶体发生滑移。
滑移可以使晶体的形状发生变化,从而完成金属的塑性加工。
在金属的塑性加工过程中,需要合理控制应力和变形,以使材料达到所需的形状和尺寸。
3. 材料的加工硬化:金属经过塑性变形后,晶粒内部会发生位错的堆积,使材料的晶界和晶内的位错密度增加,从而增加材料的硬度和强度。
这种加工硬化现象可以通过热处理来消除或减轻。
4. 金属材料的可塑性和加工性:金属材料的可塑性是指金属在
塑性变形过程中的变形能力。
不同种类的金属材料具有不同的可塑性和加工性能,需要根据实际情况选择合适的金属材料进行塑性加工。
综上所述,金属塑性加工原理是通过施加外力使金属材料发生塑性变形,实现所需形状和尺寸的改变。
金属材料的结晶学、力学性能、变形机制和加工硬化等方面的知识对于金属塑性加工具有重要意义。
在实际加工过程中,需要综合考虑材料的可塑性和加工性能,以确保加工过程的稳定性和质量。
金属塑性变形机制-讲义
金属塑性成形理论基础(一)金属塑性变形机制参考讲义前言金属塑性加工是利用金属的塑性,在外力的作用下,通过模具(或工具)使简单形状的坯料成形为所需形状和尺寸的工件(或毛坯)的技术。
它也被称之为塑性成形或压力加工。
金属塑性加工方法主要包括锻造、冲压、轧制、拉拔、挤压等几种类型。
为何采用塑性成形技术?⏹金属经过塑性成形后能改善其组织结构和力学性能。
铸造组织经过热塑性变形后由于金属的变形和再结晶,会使原来的粗大枝晶和柱状晶粒变为晶粒较细、大小均匀的等轴再结晶组织,使钢锭内原有的偏析、缩松、气孔、夹渣等压实和焊合,其组织变得更加紧密,提高了金属的塑性和力学性能。
因此铸件的力学性能低于同材质的锻件的力学性能。
⏹塑性成形能保证金属纤维组织的连续性,使锻件的纤维组织与锻件外形保持一致,金属流线完整,可保证零件具有良好的力学性能与长的使用寿命。
什么是塑性变形?当外力增大到使金属的内应力超过该金属的屈服极限以后,金属就会产生变形。
当外力停止作用后,金属的变形并不消失。
这种变形称为塑性变形。
(当外力作用在金属上时,如受拉,金属内的原子间距变大,如果这种变化是弹性范围内的,当外力去除后,原子还能恢复到原来的状态;如果外力较大,这种变化就达到了塑性阶段了,当外力去除之后,有一部分变化就不能恢复了,金属就发生了塑性变形。
作为一种极限,当外力大到一定程度,原子间的结合力被打破,那么金属就断了。
)塑性是指金属材料在载荷外力的作用下,产生永久变形(塑性变形)而不被破坏的能力。
塑性不仅与材料本身的性质有关,还与变形有方式和变形条件有关。
材料的塑性不是固定不变的,不同的材料在同一变形条件下会有不同的塑性,而同一材料,在不同的变形条件下,会表现不同的塑性。
塑性是反映金属的变形能力,是金属的一咱重要的加工性能。
塑性好的材料可以顺利地进行某些成型工艺加工,如冲压、冷弯、冷拔、校直等。
金属材料通过冶炼、铸造,获得铸锭后,可通过塑性加工的方法获得具有一定形状、尺寸和力学性能的型材、板材、管材或线材,以及零件毛坯或零件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
金属塑性加工原理(第1章补充)数学与力学基础李赛毅中南大学2013-091目的§1.1矢量、张量及其基本运算了解矢量与张量的基本性质及其运算法则:z矢量与张量的表征z矢量代数与张量代数(运算)§1.2变形与应变了解连续介质力学的基本概念z张量:变形梯度、位移梯度、速度梯度z变形z应变z。
23§1.1矢量、张量及其基本运算4矢量¾是从点x 指向点y 的线段,具有方向和长度¾是力、位移等物理量的合适表征方式●矢量:任意两点x 和y 之间的差别●点:对于三维Euclidean (欧几里德) 空间R 3中的元素,其位置可以用Cartesian (笛卡儿) 坐标表示:x {x 1, x 2, x 3} ∈R 3v r x yor v5Two vectors u and v compound according to the parallelogram law (平行四边形法则):w = u + vIf u and v are taken to be the adjacent sides of a parallelogram, then w is the diagonal (对角线)of the parallelogram:矢量的复合(和):平行四边形法则wvu o 6The magnitude (or length) of a vector v is related to its components (v i ) through:222123i iv v v v v v ≡=++=v 矢量的大小Summation convention (or Einstein Summation):Summation is required over the repeated index (i= 1,2,3…full range) in the same term.Index notationEinstein 求和约定7矢量的标积Scalar product●亦称为:内积(Inner product )、点积(Dot product)●定义:¾u, v :矢量u 和v 的长度¾Θ : 矢量u 和v 的夹角cos i i uv u v θ⋅==u v ●典型的物理意义:u ⋅v = 0Æ垂直(即正交)u ⋅v =uv Æ平行u ⋅v =−uv Æ反平行●标积的可交换性(commutative )u ⋅v = v ⋅uv uθ8基矢量Base Vectors {e i }●定义:具有单位长度且彼此正交的一组矢量,亦称单位矢量.●考虑一个以O 为原点的包括3个基矢量{ei } 或{e 1, e 2, e 3}的正交坐标系,则:1e 3e 2e o 克罗内克符号Kronecker delta : δij其分量可以排列成一个3×3 的单位矩阵I (第一个指数为行,第二个指数为列:1 if = 0 if i j ij i ji jδ⎧⋅==⎨≠⎩e e 100010001⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦I9基矢量(2)●The coordinates of a point x can be defined by the scalar product●With the parallelogram law,any arbitrary vector can be expressed as a vector sum (矢量和)of the three base vectors(v 1, v 2, v 3 : components of v )31122331i i i ii v v v v v ==++==∑v e e e e e x1e 3e 2eo x-o()i i x x o =−⋅e vector vector i at point i x x =x e 位置矢量Position vector 10矢积Vector Product (1)●也称作:叉积Cross Product●The vector product of vectors u and v is denoted by u ×v .●It is a vector normal to the plane containing u and v , and oriented in the sense of a right-handed screw rotating from u to v .uvu ×v Its magnitude is equal to the area of a parallelogram two of whose sides are the vectors u and v :| u ×v | = uv sin θvu θ11矢积Vector Product (2)● A convenient expression for vector product in terms of components:ijk i j ku v ε×=u v e 1 if = 123, 312 or 231 (even permutations of 123)-1 if = 132, 213 or 321 (odd permutations of 123)0 if any two of are equalijk ijk ijk ijk ε⎧⎪=⎨⎪⎩No. vector product is NOT commutative !u ×v = −v ×u 12基矢量的手性Handedness of Base Vectors ● A set of orthonormal base vectors can be selected in two ways:(e 1×e 2) ⋅e 3= +1 Æright-handed coordinate basis .(e 1×e 2) ⋅e 3= −1 Æleft-handed coordinate basis .* In general, the triple scalar product in component form is given by()ijk i j ke u v w ×⋅=u v w 1e 3e 2e o(e 1×e 2)1e 3e 2e o (e 1×e 2)13坐标变换(1)●坐标选取的任意性:Many different choices are possible for the orthonormal base vectors and origin of the Cartesian coordinate system. Coordinate systems are usually chosen in different ways for convenience.●坐标变换的必要性:Change of coordinate system will be necessary in connecting quantities represented in different systems.● A vector is independent of the choice of coordinate system:¾Its direction and magnitude must not change. They are “invariants”.¾Its components will change with the choice.14●Consider a new orthonormal system consisting of right-handed base vectors (e’1, e’2, e’3)with thesame origin associated with (e 1, e 2, e 3).●A vector V can be expressed equally well in either coordinate system:V = v i e i = v ’i e ’i Note different values of the components in different coordinate system !What ’s the relationship between the two sets ofcomponents for the same vector?坐标变换(2)e ’1e 2e ’2e3e ’3e 1V15方向余弦Direction Cosines ●The two systems are related by nine direction cosines aij ,i.e. thecosine of the angle between the i -th primed and the j -th unprimed base vectors:In other word, a ij represent the components of e’i in e j 'ij i j a =⋅e e 'i ij ja =e e ●The set of direction cosines are not independent. There are six relationships (i, j = 1, 2, 3) between the nine direction cosines, and therefore only three of them are independent.''()() i j ik k jl l ik jl k lik jl kl ik jk ijaa a a a a a a δδ⋅=⋅=⋅===e e e e e eje 'ie θcos i iuv u v θ⋅==u v 16●The direction cosines can be arranged into a 3x 3 matrix R :●It is an orthogonal (正交)matrix, because each row (or column) is mutually orthogonal to the other two rows (or columns). Each row contains the direction cosines of the new axes in terms of the old axes. Each column contains the direction cosines of the old axes in terms of the new axes.I T =RR 1T −=R R det 1=±R 旋转矩阵Rotation Matrix●Properties of an orthogonal matrix:(:)ik jk ij ki kj ij a a or a a δδ==111213212223313233a a a a a a a a a ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦R 行列式Determinant:17Inter-relationships between components of vectors in the two systems:j ji i v a v ′=These relations are called the laws of transformation for the components of vectors.矢量变换法则Transformation Law 111121312212223233132333'''v a a a v v a a a v v a a a v ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦18小结●掌握矢量的定义、性质和基本运算¾Base vectors 基矢¾Scalar or dot product 标积/点积¾Vector or cross product 矢量积/叉积¾Transformation of axes 坐标变换¾Direction Cosines; Rotation matrix 方向余弦;旋转矩阵●熟悉符号¾Einstein Summation¾Kronecker delta: δij¾permutation (置换)tensor: εijk19张量Tensors●Tensors are mathematical representation of physical entities or phenomena (e.g. Stress, Strain, Elastic Stiffness).●They permit complicated behaviors to be described in a compact fashion that can be easily translated into numerical form. ¾Vectors are tensors of rank 1¾Scalars are tensors of rank 0●A tensor can be written as an organized collection of numbers. In physics, the numbers may be obtained as physical quantities that depend on a basis, and the collection is determined to be a tensor if the quantities transform appropriately under change of basis.20张量积Tensor Product (1)¾若u 和V 为矢量,则w 也称为外积(outer product )¾所得张量的阶是各张量的阶之和¾对于给定的基矢{e i }:=⊗w u v●张量积, where ij i j ij i ji jw w u v =⊗=⊗=∑w u v e e unit dyads(单位并矢,构造高阶张量时需要)张量积 Tensor Product (2)● Examples of Matrix representation⎡ u1 ⎤ u ⊗ v = ⎢u2 ⎥ [ v1 v2 ⎢ ⎥ ⎢u3 ⎥ ⎣ ⎦ ⎡ u1v1 u1v2 v3 ] = ⎢u2 v1 u2 v2 ⎢ ⎢ u3v1 u3v2 ⎣ u1v3 ⎤ u2 v3 ⎥ ⎥ u3v3 ⎥ ⎦3-dimention, 1st-order 3-dimention, 1st-orderRank of tensor: 1 + 1 Number of components: 3×3u ⎤ ⎡v ⎡u u ⊗ v = ⎢ 11 12 ⎥ ⊗ ⎢ 11 ⎣u21 u22 ⎦ ⎣v212-dimention, 2nd-order 2-dimention, 2nd-order⎡ u11v11 u11v12 v12 ⎤ ⎢ u11v21 u11v22 =⎢ v22 ⎥ ⎢ u21v11 u21v12 ⎦ ⎢ ⎣u21v21 u21v22u12 v11 u12 v12 ⎤ u12 v21 u12 v22 ⎥ ⎥ u22 v11 u22 v12 ⎥ ⎥ u22 v21 u22 v22 ⎦21Rank of tensor: 2 + 2 Number of components: 4×4并矢积 Dyadic Product● Dyadic product is the special case of the tensor product between two vectors of the same dimensionu ⊗ v = (ui ei ) ⊗ (v j e j ) = ui v j ei ⊗ e j (α u) ⊗ v = u ⊗ (α v ) = α ( u ⊗ v ) u ⊗ (v + w) = u ⊗ v + u ⊗ w (u + v ) ⊗ w = u ⊗ w + v ⊗ w● Similar to vector product, outer product is NOT commutative, i.e.Proof:unit dyadsu ⊗ v ≠ v ⊗u22u ⊗ v = (ui ei ) ⊗ (v j e j ) = (ui v j )ei ⊗ e j where wij = ui v j v ⊗ u = (vi ei ) ⊗ (u j e j ) = (vi u j )ei ⊗ e j where wij = vi u jSaiyi Li (Central South University)11并矢举例: 位错滑移● We commonly form a dyad for the strain, m, produced on a slip system by combining unit vectors that represent slip direction b and slip plane normal n.m = b⊗n ( m ij = b i n j )εslip= Δγ m = Δγ b ⊗ nShear strainslip (ε ij = Δγ mij = Δγ bi n j )m - Schmid tensor ε - Strain tensor* 以后会详述23对称与反对称张量● A (2nd-order) tensor is said to be对称 symmetric (e.g. stress, strain tensors), ifT = TT (or Tij = Tji)反对称 anti-symmetric or skew-symmetric (e.g.rotation), if T = − TT (or Tij = − Tji) ● Any tensor can be decomposed (分解)into a symmetric and an anti-symmetric part, i.e. T=S+W where S = (T + TT)/2 W = (T − TT)/224Saiyi Li (Central South University)12张量变换 Tensor Transformations● Transformation of tensors follows the rules set up for vectors and unit vectors. Components change with transformation !′ T = Tij ei ⊗ e j = Trs e'r ⊗ e's = Tij (λri e'r ) ⊗ (λsj e's )Thuse 'i = aij e j or : ei = a ji e ' j= λri λsjTij e'r ⊗ e'sTrs = λ riλ sjTij ′25小结● 掌握张量的定义、性质和基本运算Tensor product, outer product, dyadic prodct 张量 积、外积、 并矢积 Unit dyads 单位并矢 Symmetric and anti-symmetric tensors Tensor transformation Scalar; Vector; Tensor26Saiyi Li (Central South University)13§1.2 变形与应变27目的§1.1 矢量、张量及其基本运算了解矢量与张量的基本性质及其运算法则:矢量与张量的表征 矢量代数与张量代数(运算)§1.2 变形的一般描述了解连续介质力学的基本概念张量:变形梯度、位移梯度、速度梯度 变形 应变。