高精度宽带锁相环HMC830-1 1 2.1 65 6
高性能小数分频锁相环的研究与实现

理论上,整数型 PLL 只能产生在频谱上纯净和 单一的 N 倍于参考频率 Vref 的输出频率。受到频 率分辨率的限制,整数型 PLL 应用范围有限。小数 分频 PLL(Fractional PLL)可以很好地解决整数型 PLL 遇到的诸如分辨率不够以及切换频率较慢等 问题。
小数分频 PLL 在保留整数型 PLL 的结构的同 时通过动态的切换反馈分频器分频系数,改变整数 型 PLL 的输出来完成小数功能。但是此方法会引 入大量的杂散噪声,这对于 PLL 的噪声性能是非常 不利的[2]。
关键词 锁相环;小数分频;小数杂散;DAC 噪声补偿 中图分类号 TN911.6 DOI:10. 3969/j. issn. 1672-9722. 2019. 11. 001
Research and Implementation of High Performance Fractional PLL
XIE Lei CHEN Haiyan CHEN Jianjun (School of Computer Science,National University of Defense Techonology,Changsha 410073)
总第 361 期 2019 年第 11 期
计算机与数字工程 Compu计te算r &机D与ig数ita字l E工ng程ineering
Vol. 47 No. 11 2651
高性能小数分频锁相环的研究与实现∗
谢 雷 陈海燕 陈建军
(国防科技大学计算机学Байду номын сангаас 长沙 410073)
摘 要 随着集成电路技术的迅猛发展,芯片内时钟信号精度要求越来越高,如何提高时钟信号的品质是集成电路行 业的研究重点。小数分频锁相环是时钟信号实现高分辨率、快速变频的常用结构,但是受到自身结构的制约,小数分频锁相 环会引入大量杂散噪声,杂散噪声对输出信号影响极大,在设计中消除和抑制杂散噪声成为挑战。论文通过分析小数分频 锁相环的基本结构,研究了杂散与噪声种类和来源,解释了杂散与噪声的产生机理,提出了一种基于 DAC 的噪声补偿技术, 设计并实现了一款高性能、低相噪的小数分频锁相环。锁相环分频精度为 24 位,功耗为 3.4mW,面积为 0.06mm2。
锁相环工作原理
锁相环工作原理锁相环是一种常用于频率合成和时钟同步的电路。
它通过比较输入信号和参考信号的相位差,并根据相位差的大小来调整输出信号的频率或者相位,以实现信号的同步。
锁相环具有高精度、快速跟踪和抑制噪声的能力,因此在许多领域得到广泛应用,例如通信、雷达、无线电和光学等。
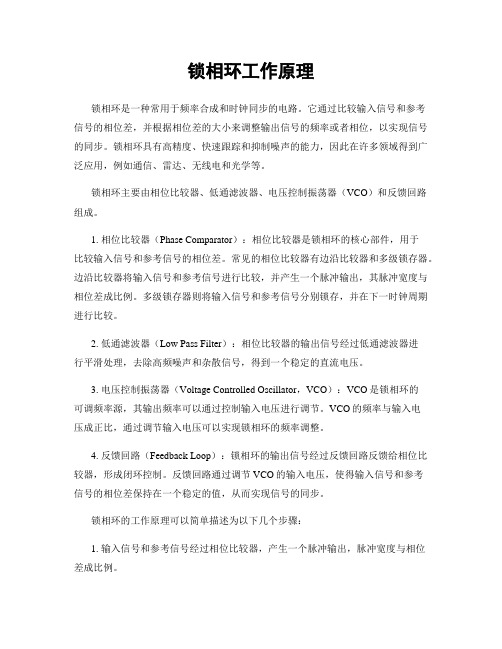
锁相环主要由相位比较器、低通滤波器、电压控制振荡器(VCO)和反馈回路组成。
1. 相位比较器(Phase Comparator):相位比较器是锁相环的核心部件,用于比较输入信号和参考信号的相位差。
常见的相位比较器有边沿比较器和多级锁存器。
边沿比较器将输入信号和参考信号进行比较,并产生一个脉冲输出,其脉冲宽度与相位差成比例。
多级锁存器则将输入信号和参考信号分别锁存,并在下一时钟周期进行比较。
2. 低通滤波器(Low Pass Filter):相位比较器的输出信号经过低通滤波器进行平滑处理,去除高频噪声和杂散信号,得到一个稳定的直流电压。
3. 电压控制振荡器(Voltage Controlled Oscillator,VCO):VCO是锁相环的可调频率源,其输出频率可以通过控制输入电压进行调节。
VCO的频率与输入电压成正比,通过调节输入电压可以实现锁相环的频率调整。
4. 反馈回路(Feedback Loop):锁相环的输出信号经过反馈回路反馈给相位比较器,形成闭环控制。
反馈回路通过调节VCO的输入电压,使得输入信号和参考信号的相位差保持在一个稳定的值,从而实现信号的同步。
锁相环的工作原理可以简单描述为以下几个步骤:1. 输入信号和参考信号经过相位比较器,产生一个脉冲输出,脉冲宽度与相位差成比例。
2. 脉冲信号经过低通滤波器,得到一个稳定的直流电压。
3. 直流电压作为输入,控制VCO的频率。
如果相位差为正,则VCO的频率增加;如果相位差为负,则VCO的频率减小。
4. VCO的输出信号经过反馈回路反馈给相位比较器,形成闭环控制。
反馈回路通过调节VCO的输入电压,使得输入信号和参考信号的相位差保持在一个稳定的值。
基于HMC833低相噪低杂散频率源的设计
2 . 2 环路 滤 波器设计 环路 滤波 器 的设计 是 本 电路设 计 的重 点 , 滤 波 性 能 的好 坏 直 接 关 系到 VC O 的噪 声影 响大 小 、 环
个可 编程 的分 频 器来控 制 需要 的频 率 , 最后 通 过
RF — N输出。
路 的锁定 时间 以及 晶体 和鉴 相器 噪声影 响 大 小[ 5 ] 。
有 0 Hz 的 频 率 误 差 输 出 频 率 。 图 1所 示 为
HMC 8 3 3的功 能 框 图 , 从 图 中 可 以清 楚 地 看 出 该 2 电路 的 设 计
由于 HMC 8 3 3内部 集 成 了 VC O, 因 此锁 相 频
芯片 的各 个功 能模 块 。
率输 出环路 只需 要 考 虑 参 考 信 号 的输 入 和环 路 滤 波器 的设计 即可[ 4 ] 。
卫星 空 间技 术 以及航 天测 控等 领域 的快速 发 展 , 现
数分 频锁 相环 , 其 内部 集成 压 控 振 荡 器 ( VC O) , 输
出频 率为 2 5 ~6 0 0 0 MHz 。 内部 集 成 的鉴 相 器 和
代频 率源 也朝着 稳定 性高 、 相 位噪 声低 、 体积小、 功
周 勇 ,李 晓波 ,秦 国领
( 装 备学 院 , 北京 1 0 1 4 1 6 )
摘要 : 航天靶场中射频( R F ) 转发系统对频率源相位噪声的要求很高, 因此有必要研究低相噪、 低杂散、 低功耗、 小步
进 的 频 率 源 。 为 了适 应 现 代 航 天 靶 场 的 要 求 , 选 用 HMc 8 3 3 L P 6 GE锁 相 环 芯 片 进 行 频 率 源 设 计 , 并用 C 8 0 5 1 F 3 1 4 单 片 机 对 锁相 环 芯 片进 行 控 制 , 设 计 出了 一 款 性 能 优 越 的 频 率 源 。测 试 结 果 表 明 在 合 理 的参 数 配 置 条 件 下 , 频 率 源
锁相环工作原理

锁相环工作原理锁相环是一种常见的电子设备,用于调整和稳定信号的相位。
它在许多领域中都有广泛的应用,包括通信系统、雷达、无线电、光学和音频设备等。
下面将详细介绍锁相环的工作原理。
一、引言锁相环是一种反馈控制系统,它通过比较输入信号和参考信号的相位差,并根据差异来调整输出信号的相位,从而使输出信号与参考信号保持同步。
锁相环通常由相位比较器、低通滤波器、电压控制振荡器(VCO)和分频器等组成。
二、工作原理1. 相位比较器相位比较器是锁相环的核心部件之一。
它将输入信号和参考信号进行相位比较,并输出相位差。
常见的相位比较器有边沿比较器和恒幅比较器。
边沿比较器通过检测输入信号和参考信号的边沿来计算相位差,而恒幅比较器则通过比较输入信号和参考信号的幅度来计算相位差。
2. 低通滤波器相位比较器输出的相位差信号通常包含噪声和高频成份,需要经过低通滤波器进行滤波处理。
低通滤波器的作用是去除高频噪声,使得输出信号更加平滑。
3. 电压控制振荡器(VCO)VCO是锁相环中的一种振荡器,其输出频率可以通过调节输入电压来控制。
VCO的输出频率与输入电压成正比。
在锁相环中,VCO的输出频率被用作反馈信号,通过调节输入电压来实现相位的调整。
4. 分频器分频器用于将VCO的输出信号分频,以提供参考信号给相位比较器。
分频器的作用是将高频信号转换为低频信号,使得相位比较器能够更精确地进行相位比较。
三、工作流程锁相环的工作流程如下:1. 输入信号和参考信号经过相位比较器进行相位比较,得到相位差信号。
2. 相位差信号经过低通滤波器进行滤波处理,去除高频噪声。
3. 滤波后的信号作为输入电压,调节VCO的输出频率。
4. VCO的输出信号经过分频器分频后作为参考信号,再次经过相位比较器进行相位比较。
5. 反复循环上述步骤,直到输入信号和参考信号的相位差趋于稳定,锁定在一个特定的相位差值上。
6. 输出信号与参考信号保持同步,实现相位的稳定和调整。
基于FPGA的高精度全数字锁相环IP核设计

基于FPGA的高精度全数字锁相环IP核设计杨秀增;蒋志年【摘要】全数字锁相环(ADPLL)在数字领域中得到广泛的应用;针对目前锁相环功能单一、设计不灵活和设计效率低等缺点,利用硬件描述语言设计了一个高精度全数字锁相环IP核,锁相环IP的中心频率和带宽均可任意编程设置,利用了Quartus II8.0中的嵌入式逻辑分析仪进行了验证;验证结果表明,该IP核运行稳定,锁相精度高,具有一定的实用性和推广价值.【期刊名称】《计算机测量与控制》【年(卷),期】2010(018)009【总页数】3页(P2127-2129)【关键词】全数字锁相环;FPGA;IP核;嵌入式逻辑分析仪【作者】杨秀增;蒋志年【作者单位】广西民族师范学院物理与信息技术系,广西,崇左,532200;广西民族师范学院物理与信息技术系,广西,崇左,532200【正文语种】中文【中图分类】TP3060 引言全数字锁相环 (ADPLL)是一个相位反馈控制系统[1],因全数字化、体积小、抗干扰能力强、可靠性高且不易受温度、电压等因素的影响,在通信、雷达、测量和自动控制等领域应用极为广泛,已成为各种电子设备中必不可少的基本部件[2]。
虽然现阶段也有不少的基于FPGA的数字锁相环的介绍,但是这些锁相环在FPGA 中一旦设定,其中心频率和环路带宽不能更改,如想更改,需得重新确定锁相环的频率关系,给应用带来不便。
针对以上情况,本设计利用硬件描述语言和采用“至顶从下”设计思路,设计了环路带宽和中心频率[3]等参数编程可调的全数字锁相环IP核,锁相环的带宽和中心频率可通过编程的方法任意可调,提高灵活性和设计效率。
1 全数字锁相环IP核结构及工作原理图1为本IP核的设计结构原理图,主要由Ava lon-MM总线接口、寄存器组和任务逻辑3大部分组成。
图1 IP核的设计结构原理图Avalon-MM总线接口,负责把逻辑设计单元挂在Avalon总线上,确保NiosII 软处理器[4-5]和任务逻辑单元之间的通信。
一种适用于复杂电网下的高精度锁相环

第28卷㊀第3期2024年3月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.28No.3Mar.2024㊀㊀㊀㊀㊀㊀一种适用于复杂电网下的高精度锁相环黄海宏,㊀刘远朋,㊀王海欣(合肥工业大学电气与自动化工程学院,安徽合肥230009)摘㊀要:针对现有并网逆变器在电网电压谐波复杂的情况下难以精确锁定电压频率和相位的问题,结合传统锁相环结构与自适应算法的理论提出一种高精度的锁相方法㊂依据对传统锁相环在复杂电网下的弊端分析,确定了锁相环采用传统低通滤波器㊁带通滤波器时的滤波效果与延时的矛盾关系㊂根据最小均方算法的高自适应特性与快速跟踪特点,结合锁相环中坐标变换公式,确定算法的输入输出以及权重矩阵,构建基于派克变换的最小均方算法矩阵模型㊂通过将所需的电压正序分量设置为不断更新的权重矩阵来进行高精度的滤波,同时通过引入均方瞬时误差和自相关估计均值来进行变步长控制,提高滤波更新速度,以适用于复杂程度不确定的电网电压进行自适应滤波锁相㊂对仿真和样机实验的结果表明:采用基于派克变换的最小均方算法的改进型双二阶广义积分锁相方法,可以在不降低动态响应速度的前提下,提高锁相环的滤波效果,进而提高并网逆变器在电网畸变严重场景下锁定电压频率和相位的跟踪精度㊂关键词:锁相环;自适应滤波;双二阶广义积分;最小均方算法;变步长DOI :10.15938/j.emc.2024.03.005中图分类号:TM73文献标志码:A文章编号:1007-449X(2024)03-0043-13㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2023-02-28基金项目:国家自然科学基金(51177037)作者简介:黄海宏(1973 ),男,博士,教授,博士生导师,研究方向为电力电子技术与自动控制;刘远朋(1997 ),男,硕士研究生,研究方向为电力电子与电气传动;王海欣(1976 ),女,硕士,高级工程师,研究方向为DSP 应用技术㊂通信作者:黄海宏High-precision phase-locked loop suitable for complex power gridsHUANG Haihong,㊀LIU Yuanpeng,㊀WANG Haixin(School of Electrical Engineering and Automation,Hefei University of Technology,Hefei 230009)Abstract :A high-precision phase-locked method was proposed by combining traditional phase-locked loops and adaptive algorithms to address the difficulty of accurately locking the voltage frequency and phase of existing grid connected inverters under complex grid voltage conditions.Based on the analysis of the drawbacks of traditional phase-locked loops,the contradiction between the filtering effect and delay when using traditional filters in phase-locked loops was determined.Based on the adaptive filtering char-acteristics of the minimum mean square algorithm and the coordinate transformation formula in the phase-locked loop,the input,output,and weight matrix of the algorithm were determined,and a minimum mean square algorithm matrix model based on the Parker transform was constructed.High precision filte-ring was achieved by setting the required voltage positive sequence component as a continuously updatedweight matrix,while variable step size control was implemented by introducing mean square instantaneous error and autocorrelation estimation mean.The experimental results show that using an improved phase-locked method based on the minimum mean square algorithm can improve the filtering effect of the phase-locked loop without reducing the dynamic response speed,thereby improving the phase-locked accuracyof the grid connected inverter under grid distortion.Keywords:phase locked loops;adaptive filtering;double second-order generalized integrator;least mean square;variable step0㊀引㊀言随着新能源逆变器在电网的大规模接入,使得逆变器视角的电网等效阻抗随之增加,导致电网电压谐波含量增多且频率发生变化,电网运行稳定性受到影响,电能质量下降[1-2]㊂传统的基于双二阶广义积分的软件锁相环(double second-order gener-alized integrator phase locked loops,DSOGI-PLL),是在产生2个用来分离正负序的正交信号的同时,利用基于内模原理的带通滤波器来对电网畸变电压进行谐波滤波㊂但在电网质量下降的情况下,如电网电压不平衡㊁大量多次谐波叠加等非理想电网场合时,DSOGI-PLL锁相难以满足滤波要求㊂目前,关于DSOGI-PLL控制改进方案,已有多篇学术论文进行分析报道,例如:1)提出三阶广义积分器,通过在双二阶广义积分器(double second-order generalized integrator,DSO-GI)中增添一个积分单元,提高其架构单元的滤波效果㊂2)提出一种在DSOGI前置特定次谐波消除模块改进型锁相环,通过前置模块去除电网畸变电压中畸变程度严重的特定次谐波,但系统增加低通滤波器会增加系统延时,降低了动态响应速度;且存在直流量时会产生周期干扰影响锁相精度[3-4]㊂3)提出一种多级并联二阶广义积分器(multi-level second-order generalized integrator,MSOGI),通过构建多个具有对不同次数谐波滤波能力的SOGI 模块的并联结构,在提高锁相环对各次谐波分量的基础上分离基波正序分量,但其结构太过复杂[5]㊂4)提出一种二阶广义积分器的改进结构,构建求差节点消除直流量影响的同时,在求差节点前加入低通滤波器环节滤除高次谐波,在此基础上加入频率自适应环节,有很好的频率跟踪性能,但引入低通滤波器影响结构锁相速度,且无法消除低次谐波影响[6-7]㊂从前述现有技术的具体实现方式可知,为了减小负序分量的影响㊁取得较好的稳态精度,其中的环路滤波器的截止频率必须取得很低,这极大地影响了动态响应的速度㊂综上,在特定场景下现有并网逆变器的锁相技术难以精确锁定电压频率和相位,故提出把基于派克(Park)变换的最小均方算法(least mean square,LMS)模型内嵌于DSOGI的拓扑结构改进方法,旨在提高并网逆变器在电网畸变严重场景下锁定电压频率和相位的跟踪精度,并通过理论分析㊁MATLAB 仿真和样机实验,验证了该改进方法的可实施性和滤波效果的有效性㊂1㊀LMS自适应滤波原理在通常的滤波场合中,从频域的角度进行滤波,只要给出相应的设计指标就可以设计出满足要求的滤波器㊂然而滤波器工作的环境是时变的,这就导致事先已经设计好的滤波器性能下降甚至不能被使用㊂自适应滤波算法中的LMS算法是基于维纳滤波的算法,核心思想是梯度下降,用梯度矢量的估计值来代替其精确值㊂原理如图1所示,其中输入端信号x(k)㊁期望信号d(k)是自适应滤波器的2个输入;输出端信号y(k)㊁误差信号e(k)是自适应滤波器的2个输出[8]㊂图1㊀LMS最小均方算法自适应滤波原理Fig.1㊀Adaptive filtering principle of LMS最小均方自适应滤波器在初始状态下,滤波器权重系数设置为W(0),通过滤波器内部对输入端信号x(k)进行相应计算,得到输出端信号y(k),再将输出端信号y(k)与滤波器的另外一路输入信号期望信号d(k)进行比较,得到系统的误差信号e(k),如果该误差满足均方误差最小的判据,则不更新权重值;如果该误差不满足均方误差最小的判据,则采用最小均方自适应优化算法去调节滤波器权重系数W㊂在多次的迭代计算后,得到系统的误差信号e(k)最终将满足均方误差最小的判据,且此时权重系数由W(0)更新到W∗㊂其中的权重优化算法为随机梯度下降,即每进一个新数据x(k)求取44电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀他的梯度并计算W ,在这过程中x (k )和d (k )的误差是对应的[9]㊂对上述自适应滤波原理扩展到矩阵形式,即输入矩阵为X (n )=[x (n -1), ,x (n -M )]T ㊂(1)式中x (n -1)~x (n -M )为多个输入信号x (k )的向量扩展形式㊂权向量定义为W (n )=[w 1,w 2,w 3, ,w m ]T ㊂(2)式中w 1~w m 为多个权重W 的向量扩展形式㊂则输出矩阵为y (n )=X T (n )W (n )㊂(3)误差向量矩阵为ε(n )=d (n )-y (n )=d (n )-X T (n )W (n )㊂(4)式中d (n )为多个期望信号d (k )的向量扩展形式㊂考虑到应用数字滤波的处理器速度较快,可使用瞬时估值误差的功率梯度来近似均方误差E (ε2(n ))的梯度▽(n ),即▽(n )=▽(E (ε2(n )))=-2ε(n )X (n )㊂(5)即权重迭代公式变为W (n +1)=W (n )+μ(n )ε(n )X (n )㊂(6)式中:W (n +1)表示跟新迭代后的下一次权重矩阵;μ(n )为步长μ的向量扩展形式㊂由式(6)得到LMS 算法权重迭代流程图,如图2所示㊂图2㊀LMS 权重迭代流程图Fig.2㊀LMS weight iteration flow chart2㊀传统DSOGI 锁相环分析传统的DSOGI-PLL 是针对单同步坐标系软件锁相环(single synchronous reference frame for phase locked loop,SSRF-PLL)在三相电网电压不平衡时无法精确获取电网电压正㊁负序分量的相位㊁幅值及频率信息所做出的改进[10]㊂该锁相环由克拉克(Clark)变换模块㊁SOGI 模块㊁Park 变换模块以及PI 调节模块组成㊂SOGI 模块是在对电网电压的α㊁β轴分量进行90ʎ偏移来产生2个正交信号以达到正负序分离的同时,利用基于内模原理的带通滤波器来对电网畸变电压进行滤波㊂再经过Park 变换,最后通过闭环控制完成锁相㊂其结构图如图3所示,图中:V abc 为三相电网电压;v α㊁v β表示电网电压的α㊁β轴分量;v ᶄα㊁v ᶄβ表示SOGI 输出的α㊁β轴分量;q 是指在时域内对原信号的相位偏移90ʎ;v ᵡα㊁v ᵡβ表示运算后的α㊁β轴分量;v d ㊁v q 表示经Park 变换输出的dq 轴分量;w ff 表示角速度前置分量,一般为50Hz;w 0为电网电压输出角速度;θ为输出电网电压相位;[T αβ]表示Clark 变换模块,[T dq ]表示Park 变换模块,ʏ表示积分模块㊂图3㊀DSOGI-PLL 系统控制结构框图Fig.3㊀DSOGI-PLL system control structure blockdiagram当电网电压不平衡时,利用对称分量法分离出电网电压正负序分量,公式可表示为V +abc =[v +a v +bv +c ]T =[T +]V abc ㊂(7)式中:V +abc 为三相电网电压的正序分量;v +a ㊁v +b ㊁v +c 分别为a㊁b㊁c 三相电压的正序分量;V abc 为三相电网电压;T +为对称分量法系数矩阵,即T +=231αα2α21α-αα21éëêêêùûúúú,其中α=e 2π3j =-12+j 32㊂通过对电网电压进行Clark 变换得到SOGI 二阶广义积分器变换得到的电压正序分量[11-12]为㊀V +αβ=[T αβ]V +abc =[T αβ][T +]V abc =[T αβ][T +][T αβ]-1V αβ=121-q q1[]Vαβ㊂(8)式中:V +αβ为电网电压的α㊁β轴正序分量;V αβ为电54第3期黄海宏等:一种适用于复杂电网下的高精度锁相环网电压的α㊁β轴分量;[T αβ]为Clark 变换系数矩阵,即[T αβ]=231-12-12032-32éëêêêêùûúúúú;q 是指在时域内对原信号的相位偏移90ʎ,即q =e π2㊂双二阶广义积分器模块不仅可以构造出两相正交电压信号从而获得电网电压正序分量,还可以滤除高频干扰信号㊂基于双二阶广义积分器自适应滤波器的传递函数为:㊀D (s )=v ᶄv (s )=kωᶄss 2+kωᶄs +ωᶄ2;(9)㊀Q (s )=q v ᶄv (s )=kωᶄ2s 2+kωᶄs +ωᶄ2㊂(10)式中:D (s )为带通滤波器的传递函数;Q (s )为低通滤波器的传递函数;v 为SOGI 模块的输入;v ᶄ㊁q v ᶄ为SOGI 模块2个输出;ωᶄ为SOGI 模块要跟踪的频率;k 为SOGI 模块增益系数㊂由滤波器的频谱特性可知,滤波器在频率ωᶄ处的增益为1,输出信号v ᶄ与q v ᶄ的相位差为90ʎ,表明滤波器可对设定的ωᶄ频率交流信号进行无差跟踪与移相㊂滤波器频谱特性如图4所示,其中:ωᶄ=100π,k =1.414㊂图4㊀DSOGI 滤波器频谱特性Fig.4㊀Spectrum characteristics of DSOGI filter由于二阶广义积分器的带通滤波特性,在实际输入信号为电网电压畸变等非理想情况下,为了达到更好的滤波效果,需要减小k 值,导致响应速度大大降低㊂受限于响应速度的要求,降低了二阶广义积分器的滤波效果,使其不能精确的反应畸变电网的相位信息㊂为此,提出一种基于LMS 自适应滤波的DSOGI 锁相环改进方法,其在能达到响应速度要求的前提下大大提高了滤波效果,进一步克服了动态响应速度与稳态精度之间的矛盾㊂3㊀基于LMS 自适应滤波的SOGI 锁相环改进方法㊀㊀相对于传统的频域滤波器,基于LMS 自适应滤波器的系统跟踪特性完美的避开了高延迟的缺点㊂将LMS 自适应滤波融入于DSOGI 锁相环中,既能极大程度上不降低动态响应速度,又能提高滤波效果,从而提高稳态精度㊂3.1㊀基于Park 变换的LMS 模型在DSOGI-PLL 控制系统中,由DSOGI 得到两相正交电压向量,需要经过Park 变换得到v +q ,再进一步闭环处理㊂新模型通过LMS 自适应滤波特性设计一种既能达到Park 变换效果,又能分离正负序,同时对输入信号进行自适应滤波的模块,替代Park 变换模块[13]㊂由前文得到LMS 权重迭代公式的矩阵形式,在三相滤波锁相系统中,需要对应锁相的时域连续数学模型,设输入矩阵为X (t )=cos ωt sin ωt -sin ωtcos ωt cos ωt -sin ωt sin ωtcos ωt éëêêêêêùûúúúúú㊂(11)式中cos ωt ㊁sin ωt 为锁相环输出的相角三角函数㊂权向量矩阵为W (t )=U +d (t )U +q (t )U -d (t )U -q (t )éëêêêêêêùûúúúúúú㊂(12)式中U +d (t )㊁U +q (t )㊁U -d (t )㊁U -q (t )分别为两相旋转坐标系dq 坐标系下电网电压正序负序分量㊂测量信号Y ᶄ(t )为DSOGI 得到实际电网两相静止坐标系αβ坐标系下的电网电压正序分量㊂期望响应输入矩阵为d (t )=Y (t )=X T(t )W (t )=U +α(t )U +β(t )éëêêùûúú㊂(13)64电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀式中:Y (t )为系统输出矩阵;U +α(t )㊁U +β(t )为经过计算得到的两相静止坐标系αβ坐标系下的电网电压正序分量㊂误差向量矩阵为ε(t )=d (t )-Y (t )㊂(14)权重迭代公式为W ᶄ(t )=W (t )+με(t )X (t )㊂(15)式中:W ᶄ(t )为计算后更新权重矩阵;μ为步长参数向量[14]㊂因此由式(11)~式(15)建立起如图5的基于Park 变换的LMS 模型㊂图5㊀基于Park 变换的LMS 模型结构框图Fig.5㊀Structure block diagram of LMS model basedon Park transformation在此模型中,利用LMS 系统跟踪的特性,将模型的输出连接反馈至系统的期望响应输入,通过计算得到的U +α(t )㊁U +β(t )与实际电网电压信号对比,得到误差后,通过LMS 算法的权重迭代公式来训练权重W (t ),以此来得到权向量矩阵中的两相旋转坐标系dq 坐标系下电网电压正序分量U +q(t )㊂由此得到基于Park 变换的最小均方算法的改进型双二阶广义积分(least mean square-double second-order generalized integrator,LMS-DSOGI)锁相环的系统结构框图,如图6所示㊂图6㊀LMS-DSOGI 结构框图Fig.6㊀Structure block diagram of LMS-DSOGI3.2㊀变步长LMS 控制传统的恒定步长的LMS 算法无法做到快速动态响应与高稳态精度的统一㊂步长μ越小,LMS 算法就具有更高的稳态精度,但同时牺牲了滤波算法的收敛速度;相反步长μ越大,LMS 算法就具有更快的收敛速度,但降低了滤波效果的稳态精度㊂鉴于恒定步长的弊端,国内外很多学者都提出了不同的变步长LMS 控制,但基本思路都相同㊂当误差ε(t )较大时,步长μ相适应的增大,提升算法的收敛速度,减少动态响应时间,随着LMS 算法的不断迭代,误差ε(t )不断减小,算法自动调整减小步长μ值,从而提升稳态精度,使LMS 算法在一定程度上解决了稳态精度与响应速度之间的矛盾㊂文献[15]提出了一种基于Kwong 算法的改进算法,称为LMS-New 算法㊂Kwong 算法是通过均方瞬时误差ε2(t )控制步长更新的,其步长更新公式[15]为μ(n +1)=ξμ(n )+ηε2(n )㊂(16)式中ξ和η为步长更新的步长因子向量与误差因子向量㊂LMS-New 算法采用可变公式η(n )替换式(16)中的固定参数μ,从而达到提高系统跟踪能力的目的,在可变公式η(n )中采用反余切函数作为激活函数,使误差与误差因子非线性化,同时引入ε(n )ε(n -1)获得误差信号的自相关估计均值㊂其步长更新公式为:μ(n +1)=ξμ(n )+η(n )ε2(n );(17)η(n )=arccot(|p (n )|);(18)p (n )=λp (n -1)+(1-λ)ε(n )ε(n -1)㊂(19)式中:η(n )为可变误差因子;p (n )为步长迭代补偿矩阵;λ为步长迭代补偿矩阵系数㊂式(19)的形式与一阶低通滤波器离散化的形式相同,为了进一步提高系统的滤波效果,步长迭代补偿矩阵系数λ的取值可以等效于λ=11+ωc T s㊂(20)式中:ωc 为低通滤波器截止频率;T s 为采样时间㊂为了滤除基波分量外的整次和非整次谐波的影响,取ωc =200π,开关频率为10kHz,则T s =0.0001,计算得λ=0.94㊂式(17)中的步长因子ξ为调节收敛速度而设置的正学习参数,同时初始迭代速度因尽量满足临界最大值,故选取较大步长因子ξ=0.9㊂为了保证系统稳定性,最后还需要对步长参数μ给予一定的限幅处理㊂74第3期黄海宏等:一种适用于复杂电网下的高精度锁相环4㊀仿真与样机验证4.1㊀系统仿真仿真框图的搭建如图7所示㊂其中包括并网三相电压模块㊁Clark 变换模块㊁SOGI 二阶广义积分发生器模块㊁LMS 最小均方自适应滤波模块㊁PI 控制模块㊁仿真结果观测模块㊂仿真模型的参数如表1所示㊂图7㊀系统仿真图Fig.7㊀System simulation diagram表1㊀仿真模型的参数Table 1㊀Parameters of simulation model㊀㊀仿真参数数值基波电压幅值/V 380A 相不平衡系数k a 1B 相不平衡系数k b 1.184C 相不平衡系数k c 0.789基波角频率ω0100πSOGI 增益系数k1.414SOGI 谐振频率ωᶄ100π变步长迭代系数λ0.94变步长步长因子ξ0.9仿真中在0~2s 与4~6s 为正常理想电网电压阶段,三相电压为平衡的基波电压U N ;在2~4s 突变为含有幅值为基波电压10%的2㊁4㊁5㊁7㊁10次谐波的不平衡三相电压,其中三相不平衡系数如表1所示㊂分别对并网电压㊁SOGI 二阶广义积分发生器输出电压㊁LMS 最小均方自适应滤波模块输出电压统一变换为三相静止坐标系abc 坐标系下的电压,再进行总谐波失真率(total harmonic distortion,THD)对比,分析其滤波效果㊂基于LMS 自适应滤波的DSOGI 系统各模块滤波效果对比如图8所示,其中方形实线表示并网电压的THD,圆形实线表示SOGI 二阶广义积分发生器模块输出电压的THD,纯实线表示LMS 最小均方自适应滤波模块输出电压下波形的THD㊂在仿真中0~2s 与4~6s 都是正常理想电网电压阶段,三者的THD 稳态数值都接近于0;从图8中可以看出在t =2.0s 后,由于电网电压处于非理想电网阶段,3个模块滤波后的THD 均发生跃变,在t =2.3s 后三者渐渐进入稳定状态,其稳定状态的THD 值如图所示,即三者稳态数值分别为并网电压波形的THD =14.14%,SOGI 滤波后电压波形的THD =4.98%,LMS 滤波后电压波形的THD =1.55%㊂非理想电网下三相电网电压自适应滤波锁相环输出的锁相稳态效果㊁暂态效果如图9与图10所示㊂图中:U a 表示电网基波电压;M 表示锁相输出角度,M 的值为0~380V,线性的对应电压相位从0到2π㊂其中锁相稳态效果图取2~4s 非理想电网阶段的2.6997~2.7003s,由图中的放大图读数可84电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀以得到锁相稳态误差为101.364μs,约0.50%;锁相暂态效果图取2.0~2.165s,是电网电压由理想状态转向非理想状态的过度阶段,其过度转折点为t =2s 时间点,即非理想阶段的起点,LMS-DSOGI 采用变步长设计后,约在t =2.16s 达到锁相稳态,故其锁相环的动态响应时间约0.16s㊂图8㊀各模块滤波效果对比图Fig.8㊀Comparison of filtering effects of eachmodule图9㊀锁相环锁相稳态效果图Fig.9㊀Phase-locked steady-staterendering图10㊀锁相环锁相暂态效果图Fig.10㊀Phase-locked transient effect diagram由此可见LMS-DSOGI 锁相环的滤波效果在SOGI 的基础上显著提升,达到了预期目标,锁相暂态效果在符合动态响应速度条件下,进一步降低了稳态误差,符合前文理论分析㊂相较于传统的DSO-GI 锁相环,基于LMS 自适应滤波的DSOGI 系统在动态性能和稳态性能上都得到了改善㊂4.2㊀样机验证实验采用低压三相三线制逆变器样机,样机参数如表2所示㊂表2㊀样机参数Table 2㊀Prototype parameters㊀㊀样机参数数值直流侧电压U dc /V 48交流侧相电压U abc /V20/15网侧电感L /mH 1滤波电容C /μF 200开关频率/kHz10样机实验采用TMS28335芯片进行数字控制,在代码中设定锁相输出角度每次到2π时清零,同时在GPIO 口产生一个翻转信号,从而在示波器上展现锁相的稳态与暂态效果㊂电网电压谐波的产生因素有很多,通常可以分为非线性负荷和逆变负荷这两类㊂非线性负荷产生工频频率的整数倍谐波,例如三相6脉波整流器产生的5㊁7次谐波,三相12脉波整流器产生的11㊁12次谐波㊂逆变负荷产生逆变频率2倍的谐波,如2㊁4㊁8㊁10次谐波等㊂为了模拟电网电压无规律的时变效果,本次样机实验在电网电压基波中随机注入上述单次谐波或多次谐波叠加,以便尽可能地模拟不同复杂程度的电网电压㊂另外,本次实验由可编程电源设备替代电网电压,限于可编程电源设备的能力,因此注入的谐波次数与幅值也受限㊂注入的谐波如表3所示,其中定义的谐波0~谐波9为单次谐波,幅值为基波电压的百分比;谐波10~谐波15为多次谐波叠加,其中2㊁4㊁5㊁7㊁8次谐波的幅值为基波电压的12%,10㊁11次谐波的幅值为基波电压的6%㊂表3㊀谐波序号定义表Table 3㊀Definition table of harmonic serial number94第3期黄海宏等:一种适用于复杂电网下的高精度锁相环㊀㊀第一组实验为传统的DSOGI锁相环与改进的LMS-DSOGI锁相环在添加相同次数幅值谐波的畸变电网下的锁相效果对比㊂单次谐波与多次谐波叠加作用下的稳态误差数据如表4㊁表5所示㊂表4㊀单次谐波作用下稳态误差对比表Table4㊀Comparison table of steady-state error under sin-gle harmonic action谐波序号基波幅值/V DSOGI稳态误差/μsLMS-DSOGI稳态误差/μs谐波02070050谐波120800230谐波220500-160谐波320420-190谐波420700150表5㊀复杂谐波作用下稳态误差对比表Table5㊀Comparison table of steady-state errors under complex harmonic effects谐波序号基波幅值/V DSOGI稳态误差/μsLMS-DSOGI稳态误差/μs谐波1020600-100谐波1120700200谐波1220420250谐波1320450-100谐波1420900290谐波1520950110由表4可以看出,传统的DSOGI锁相环在实验设定的单次谐波电网下锁相平均稳态误差约为670μs,即3.35%㊂且在注入低次谐波时,锁相环的稳态误差均很大;相较于传统的DSOGI锁相环,改进的LMS-DSOGI锁相环在复杂畸变电网下的锁相平均稳态误差约为150μs,即0.75%㊂由表5可以看出,传统的DSOGI锁相环在实验设定的复杂畸变电网下的锁相平均稳态误差约为700μs,即3.5%㊂偶尔会出现稳态误差很大的情况,导致锁相环很大程度上不能稳定在700μs的平均稳态误差㊂相较于传统的DSOGI锁相环,改进的LMS-DSOGI锁相环在复杂畸变电网下的锁相稳态误差约为200μs,即1.0%㊂并且在相同的畸变电网作用时,不论其添加的谐波如何,改进的LMS-DSOGI锁相环都比传统的DSOGI锁相环的锁相稳态误差要低得多,证明添加了LMS算法的改进型锁相环能通过自适应滤波来提高从复杂电网畸变电压中分离基波正负序的精确度,以此提升锁相的精度㊂第二组实验为改进的LMS-DSOGI锁相环在添加相同次数幅值谐波的畸变电网下,不同基波幅值对锁相效果的影响,稳态误差数据如表6所示㊂表6㊀不同基波幅值的LMS-DSOGI锁相环稳态误差表Table6㊀Table of steady-state error of LMS-DSOGI phase-locked loop with different fundamental amplitude 谐波序号谐波幅值/%基波幅值20V稳态误差/μs基波幅值15V稳态误差/μs 谐波0125080谐波112230250谐波212-160-125谐波312-190-240谐波46150150由表6可以看出,改进的LMS-DSOGI锁相环在基波幅值15V时的锁相平均稳态误差约为169μs,即0.845%,相比于基波幅值20V的150μs(0.75%)平均稳态误差有稍微的提高㊂随着基波电压增大,锁相环采样以及算法运算更为精确,以此降低了稳态误差,提高锁相精度㊂第三组实验为改进的LMS-DSOGI锁相环在添加幅值不同㊁次数相同的谐波畸变电网下的锁相效果,稳态误差数据如表7所示㊂表7㊀不同谐波幅值的LMS-DSOGI锁相环稳态误差表Table7㊀Table of steady-state error of LMS-DSOGI phase-locked loop with different harmonic amplitude由表7可以看出,改进的LMS-DSOGI锁相环在谐波为谐波5到谐波9时的锁相平均稳态误差约为138μs,即0.69%,和谐波幅值更大的谐波0到谐波4作用下的150μs(0.75%)平均稳态误差几乎相同㊂随着添加谐波幅值的增大,电压的畸变程度也越来越大,改进的LMS-DSOGI锁相环中采用LMS 自适应滤波部分同时也会根据所采样的电压进行自适应滤波,使锁相环能够稳定输出精确度更高的锁相角度,大大削弱了电网电压不停变化的复杂谐波对锁相精度带来的负面影响㊂在上述的几组实验数据中畸变最严重的是在基05电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀波电压上注入了谐波15的一组,即注入幅值为基波幅值12%的2㊁4㊁5㊁7㊁8次以及幅值为基波幅值6%的10次谐波的畸变电压㊂传统的DSOGI 锁相环在该畸变电压下的稳态锁相效果如图11所示㊂图11㊀DSOGI 锁相环稳态误差Fig.11㊀Steady-state error diagram of DSOGI图11(c)为DSOGI 锁相环多周期稳态效果展示图;图11(b)为图11(c)中的虚线圆圈处一个周期的放大;图11(a)为图11(b)中矩形框处的放大展示图㊂图U a 表示电网A 相畸变电压波形;图11~图18中的M 均表示锁相效果翻转波形,锁相一个周波即翻转一次㊂由图中可以看出,稳态误差约为950μs㊂改进的LMS-DSOGI 锁相环在该畸变电压下的稳态锁相效果如图12所示,其中图12(c)为改进的LMS-DSOGI 锁相环多周期稳态效果展示图;图12(b)为图12(c)中的虚线圆圈处一个周期的放大;图12(a)为图12(b)中矩形框处的放大展示图㊂图中的U a 表示电网A 相畸变电压波形㊂从图中可以看出,稳态误差约为120μs㊂由此可见在电网电压同样复杂的情况下,改进的LMS-DSOGI 锁相环比传统的DSOGI 锁相环稳态误差更小,滤波效果更好,锁相效果更精确㊂图12㊀LMS-DSOGI 锁相环稳态误差Fig.12㊀Steady-state error diagram of LMS-DSOGI图13~图15为变步长LMS-DSOGI㊁DSOGI 以及恒定步长LMS-DSOGI 三种不同锁相环在电压跌落实验中的暂态波形图㊂图13㊀变步长LMS-DSOGI 锁相环电压跌落动态效果Fig.13㊀Dynamic effect of variable step size LMS-DSOGI phase-locked loop during voltage drop15第3期黄海宏等:一种适用于复杂电网下的高精度锁相环。
正确理解锁相环Jitter

Application Report
ZHCA492 – JAN 2013
正确理解时钟器件的抖动性能
Steven Shi China Telecom Application Team
摘
要
在选择时钟器件时,抖动指标是最重要的关键参数之一。但不同的时钟器件,对抖动的描述不尽相同,如不带 锁相环的时钟驱动器有附加抖动指标要求,而带锁相环实现零延时的时钟驱动器则有周期抖动和周期间抖动指。同 时,不同厂家对相关时钟器件的抖动指标定义条件也不一样,如在时钟合成器条件下测试,还是在抖动滤除条件下 测试等。 为了正确理解时钟相关器件的抖动指标规格,同时选择抖动性能适合系统应用的时钟解决方案,本文详细介绍 了如何理解两种类型时钟驱动器的抖动参数,以及从锁相环输出噪声特性理解时钟器件作为合成器、抖动滤除功能 时的噪声特性。
2 时钟抖动和锁相环噪声模型
对时钟器件而言,抖动和锁相环是两个最基本的概念。
2.1 抖动
如图 1 所示,时钟抖动可分为三种抖动类型:时间间隔误差 TIE(Time Interval Error)、周期抖动 PJ (Period Jitter)和相邻周期间抖动 CCJ(Cycle to Cycle Jitter)。周期抖动是多个周期内对时钟周期的变化 进行统计与测量的结果,相邻周期间抖动是时钟相邻周期的周期差值进行统计与测量的结果,由于这两种 抖动是单个周期或相邻周期的偏差,表征的是短期抖动行为。时间间隔误差又称为相位抖动( Phase Jitter),是指信号在电平转换时,其边沿与理想时间位置的偏移量,通常表征的是长期抖动行为。
fpga内部的锁相环或者时钟管理单元的功能

文章标题:深度解析FPGA内部的锁相环及时钟管理单元功能1. 概述FPGA作为一种灵活可编程的集成电路,受到广泛关注。
而锁相环(PLL)和时钟管理单元(CMU)作为FPGA内部重要模块,发挥着关键的作用。
本文将深度探讨FPGA内部的锁相环和时钟管理单元的功能,帮助读者更好地理解这一关键模块在FPGA设计中的作用。
2. 锁相环的功能2.1 时钟信号的稳定性在FPGA中,时钟信号的稳定性至关重要,而锁相环能够帮助实现对时钟信号的稳定生成和分配。
通过锁相环模块,可以将外部的参考时钟信号通过倍频、分频等技术进行稳定的时钟生成,确保时钟信号的稳定性和可靠性。
2.2 时序收敛锁相环还能够协助FPGA实现时序收敛。
由于FPGA中存在大量的逻辑元件和时序约束,时钟信号的分配和同步是至关重要的。
而锁相环可以为这些逻辑元件提供同步的时钟信号,帮助实现时序收敛,提高系统的稳定性和性能。
3. 时钟管理单元的功能3.1 时钟频率的选择和控制时钟管理单元可以帮助FPGA实现对时钟频率的选择和控制。
通过时钟管理单元模块,可以动态地控制时钟频率,满足不同模块对时钟的需求,实现对时钟信号的灵活管理。
3.2 时钟信号的分配和缓冲时钟管理单元还可以实现对时钟信号的分配和缓冲。
在FPGA设计中,存在着复杂的时序约束和时钟域的划分,而时钟管理单元可以帮助实现对时钟信号的合理分配和缓冲,确保时钟信号能够准确到达各个逻辑模块。
4. 个人观点和理解通过对FPGA内部的锁相环和时钟管理单元功能的深度挖掘,我对这一关键模块有了更加深入的理解。
在实际设计中,我深切感受到这些模块的重要性,它们对于整个FPGA系统的稳定性、性能和灵活性都起着至关重要的作用。
5. 结语通过本文对FPGA内部的锁相环和时钟管理单元功能的探讨,读者可以更好地理解这一关键模块在FPGA设计中的重要作用。
在今后的FPGA设计中,我们应该充分利用这些功能,合理设计时钟分配和管理策略,提高系统的稳定性和性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高精度宽带锁相环HMC830LP6GE
齐凌杰,世强电讯应用工程师
Hittite微波公司是在通信及军事市场拥有完整的MMIC解决方案的世界级供应商。
该公司最近拓展了其领先业界的锁相环产品线,推出高精度宽带锁相环芯片HMC830LP6GE,工作频率为25MHz—3000MHz,覆盖所有常用的通信频段。
产品简介
HMC830LP6GE是内部集成了VCO的小数分频锁相环芯片,以及可工作在100MHz的相位检测器和delta-sigma调制器,这使的其在较宽的环路带宽内有着极好的频谱特性。
性能特征与使用
HMC830LP6GE的优质因数在整数和小数状态下分别是-230/-227。
双边带RMS抖动小于180fs。
精确频率模式使得输出频率的可以非常小的步进,做到0Hz频率误差。
HMC830LP6GE已经在宽带范围内匹配到50欧姆,输出功率动态范围是9dB(3dB step),其唤醒时间只有250微秒。
HMC830LP6GE采用6*6塑封表贴封装。
在-40度到85度的温度范围内有优秀的稳定性。
由于该芯片集成了VCO,PFD,及分频器,因此使用者只需要设计环路滤波器。
由于该芯片还集成了放大器,环路滤波器的设计也较为简单,只要采用电容加电阻构成的无源滤波器就可以了。
滤波器的拓扑结构及部分参考数值如下。
环路带宽(kHz)
C1
(pF)
C2
(nF)
C3
(pF)
C4
(pF)
R2
(kΩ)
R3
(kΩ)
R4
(kΩ)
74150272202200.8211 90270 3.95656 1.211
与市场上流行产品的对比
下图是HMC830LP6GE与市场某流行的宽带PLL的一些指标比较
XXXX HMC830LP6GE
Typical rms jitter0.5ps0.18ps
可编程输出电平-4to5dBm-3to6dBm
FoM-213dBc/Hz-227dBc/Hz
FoM也就是优质因素,这个表示的是归一化到每Hz的相位噪声。
锁相环芯片该指标的好坏决定了其在所有频率的相位噪声性能,可以看出,HMC830LP6GE在该指标上超出很多。
XXXX产品的杂散约是-70dBc,而此项指标HMC830LP6GE也有很大的优势,下图是HMC830LP6GE在2113.5MHz的测量所得。
应用市场
HMC830LP6GE拥有业界最好的噪声性能和杂散,因此当你需要很好的信号质量和信噪比的时候,HMC830LP6GE将会是你的首选。
其应用市场包括:宽带多载波,多标准的蜂窝基站设备中上下变频,作为低抖动的时钟本振发生器,或作为可调的参考源以取得无杂散信号;也可以用在高QAM的微波点对点通讯,软件无线电及测试测量设备中。
样品及评估板现在已经可以提供,详情请联系Hittite中国区授权代理商世强电讯。