四轴飞行器飞行原理
四轴 原理

四轴原理
四轴原理即为四旋翼飞行器的工作原理。
四旋翼飞行器由四个相对对称的旋翼组成,每个旋翼都由一个电动机驱动,并通过控制电路进行精确的调节。
四轴飞行器的飞行原理是通过对四个旋翼的转速进行精确控制,实现悬停、上升、下降、前进、后退、向左、向右平移以及旋转等多种飞行动作。
具体原理如下:
1. 升力平衡原理:四个旋翼产生的升力将飞行器维持在空中,飞行器的重力与升力平衡,实现悬停状态。
2. 空气动力学平衡原理:四个旋翼的转速可以通过电机转速控制器进行精确调节,进而调节各个旋翼产生的升力大小,实现空气动力学平衡。
3. 控制算法原理:通过搭载的传感器(如加速度计、陀螺仪、磁力计等)实时监测飞行器的姿态信息,将监测到的数据传输给飞行控制器。
飞行控制器根据姿态信息计算出相应的控制指令,通过电调调节四个旋翼的转速,控制飞行器的姿态。
如需向前飞行,则增加后面两个旋翼的转速,减小前面两个旋翼的转速,使飞行器倾斜向前。
类似地,对其他方向的飞行也是通过对相应旋翼转速的调节实现的。
4. 电源与电路原理:四轴飞行器通过电池为电动机提供能量,电路控制系统将飞行器的控制信号转化为电流和电压输出供电给电动机。
通过对四个旋翼的转速进行精确控制,在合适的气动力学平衡和姿态控制下,四轴飞行器能够实现精确悬停、稳定飞行及各种飞行动作,具有广泛的应用前景。
四轴飞行控制原理
四轴(1)-飞行原理总算能抽出时间写下四轴文章,算算接触四轴也两年多了,从当初的模仿到现在的自主创作经历了不少收获了也不少。
朋友们也经常问我四轴怎么入门,今天就简单写下四轴入门的基本知识。
尽量避开专业术语和数学公式。
1、首先先了解下四轴的飞行原理。
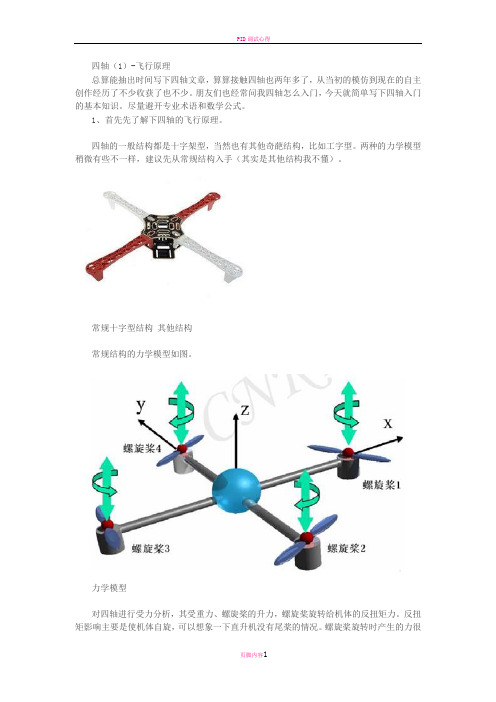
四轴的一般结构都是十字架型,当然也有其他奇葩结构,比如工字型。
两种的力学模型稍微有些不一样,建议先从常规结构入手(其实是其他结构我不懂)。
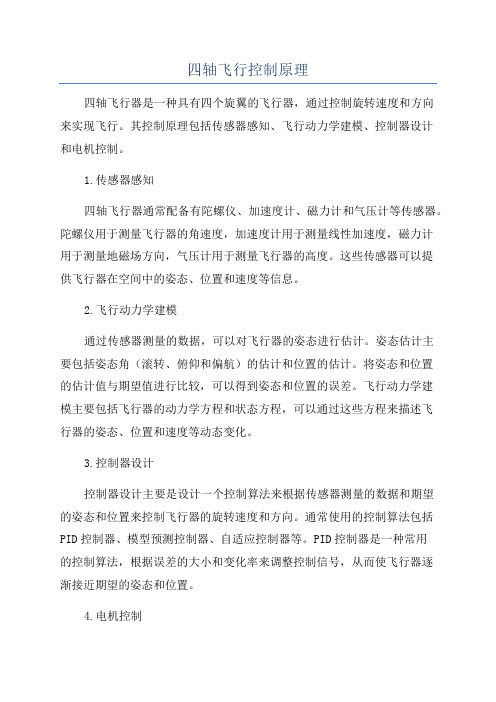
常规十字型结构其他结构常规结构的力学模型如图。
力学模型对四轴进行受力分析,其受重力、螺旋桨的升力,螺旋桨旋转给机体的反扭矩力。
反扭矩影响主要是使机体自旋,可以想象一下直升机没有尾桨的情况。
螺旋桨旋转时产生的力很复杂,这里将其简化成只受一个升力和反扭矩力。
其它力暂时先不管,对于目前建模精度还不需要分析其他力,顶多在需要时将其他力设为干扰就可以了。
如需对螺旋桨受力进行详细研究可以看些空气动力学的书,推荐两本,空气螺旋桨理论及其应用(刘沛清,北航出版社)空气动力学基础上下册(徐华舫,国防科技大学)网易公开课:这个比麻省理工的那个飞行器构造更对口一些。
荷兰代尔夫特理工大学公开课:空气动力学概论以上这些我是没看下去,太难太多了,如想刨根问底可以看看。
解释下反扭矩的产生:电机带动螺旋桨旋转,比如使螺旋桨顺时针旋转,那么电机就要给螺旋桨一个顺时针方向的扭矩(数学上扭矩的方向不是这样定义的,可以根据右手定则来确定方向)。
根据作用力与反作用力关系,螺旋桨必然会给电机一个反扭矩。
在转速恒定,真空,无能量损耗时,螺旋桨不需要外力也能保持恒定转速,这样也就不存在扭矩了,当然没有空气也飞不起来了。
反扭矩的大小主要与介质密度有关,同样转速在水中的反扭矩肯定比空气中大。
因为存在反扭矩,所以四轴设计成正反桨模式,两个正桨顺时针旋转,两个反桨逆时针旋转,对角桨类型一样,产生的反扭矩刚好相互抵消。
并且还能保持升力向上。
六轴、八轴…类似。
我们控制四轴就是通过控制4个升力和4个反扭矩来控制四轴姿态。
四轴飞行器原理教程解读

2.5电池与充电器篇
为什么要选锂电池?
同样电池容量锂电最轻,起飞效率最高。 电池的多少 mAh 是 什么意思? 表示电池容量,如 1000mAh 电池,如果 以 1000mA 放电,可持续放电 1 小时。 如果以 500ma 放电,可以持续放电 2 小时。 电池后面的 2S ,3S ,4S 什么意思? 代表锂电池的节数,锂电池 1 节标准电压 为 3.7V,那么 2S 电池,就是代表有 2个 3.7V 电池在里面,电压为 7.4V。
第一章四轴飞行器工作原理
1.1四轴飞行器机械结构
四轴飞行器是一种由固连在刚性十字交叉结构上的 4 个电机驱动的 一种飞行器。飞行器动作依靠 4 个电机的转速差进行控制, 其机械结构 相对简单, 可由电机直接驱动,无需复杂的传动装置。四轴飞行器按照 电机轴的布置方式可分为十字模式和 X 模式,对于姿态测量和控制来说, 两种方式差别不大。考虑到 X 模式使用比较广泛, 本次以X模式讲解。
1.3.2电机串级PID控制
串级与单级PID区别:串级采用的是角度和角速度两级PID,单级只采用 角度PID。假如我们控制物体位移为零,采用单级位移PID控制,由于物 体速度不为零,我们就不能保证物体位移为零,如果采用位移和速度串 级PID就能保证物体位移为零了。所以四轴采用串级PID控制性和稳定新 都将更强。
四轴电机一般选朗宇电机,其它如新西达和银燕电机都不靠谱, 也要防止买到次品。四轴电调一般选用好盈电调,其它如新西达和 银燕电调都不靠谱,也要防止买到次品 做四轴是个烧钱东西,一般电机、电调、螺旋桨、机架、遥控 器、电池、充电器都需要买,这些自己动手做几乎不可能了,我们 能够自己做的也就是飞控板可以自己设计,初学者要能够完全做会 四轴一般得花3000元以上,所以选择做四轴飞行器的请慎重考虑。
四轴飞行器的飞行原理

四轴飞行器的飞行原理四轴飞行器,作为一种现代飞行器形式,具有独特的设计和飞行原理。
其飞行原理主要基于空气动力学和控制理论。
四轴飞行器采用四个旋翼组件来产生升力和推力,并通过控制这些旋翼的转速和角度来实现飞行动作。
升力产生四轴飞行器的主要飞行模式是垂直起降,因此需要产生足够的升力来使其脱离地面并维持空中飞行。
四轴飞行器的四个旋翼通过旋转产生气流,这些气流在旋翼叶片的空气动力学作用下产生升力。
旋翼的升力与其旋转的速度成正比,因此控制旋翼的转速可以调节飞行器的升力。
姿态控制除了产生升力,四轴飞行器还需要控制其姿态,即控制其在空中的方向和倾斜角度。
四轴飞行器通过调节各个旋翼的推力和速度来实现姿态控制。
例如,如果要向前飞行,可以增加后方旋翼的推力或减小前方旋翼的推力,以产生向前的倾斜力矩。
稳定性控制为了保持飞行器在空中的稳定性,四轴飞行器需要进行实时的稳定性控制。
通常采用陀螺仪和加速度计等传感器来监测飞行器的姿态和运动状态,然后通过飞行控制系统来计算并调节旋翼的转速和姿态,使飞行器保持平稳飞行。
飞行模式四轴飞行器可以实现多种飞行模式,如手动控制飞行、自动悬停和自动返航等。
在手动控制模式下,飞行器由操纵员通过遥控器进行操控。
在自动悬停和自动返航模式下,飞行器通过预先设定的飞行控制算法和传感器数据来实现自主飞行。
综上所述,四轴飞行器的飞行原理基于空气动力学和控制理论,并通过旋翼产生升力、姿态控制和稳定性控制来实现飞行动作。
其独特的设计和飞行原理使其成为一种灵活多用途的飞行器形式,广泛应用于航拍、搜救、科研等领域。
四轴飞行控制原理
四轴飞行控制原理四轴飞行器是一种具有四个旋翼的飞行器,通过控制旋转速度和方向来实现飞行。
其控制原理包括传感器感知、飞行动力学建模、控制器设计和电机控制。
1.传感器感知四轴飞行器通常配备有陀螺仪、加速度计、磁力计和气压计等传感器。
陀螺仪用于测量飞行器的角速度,加速度计用于测量线性加速度,磁力计用于测量地磁场方向,气压计用于测量飞行器的高度。
这些传感器可以提供飞行器在空间中的姿态、位置和速度等信息。
2.飞行动力学建模通过传感器测量的数据,可以对飞行器的姿态进行估计。
姿态估计主要包括姿态角(滚转、俯仰和偏航)的估计和位置的估计。
将姿态和位置的估计值与期望值进行比较,可以得到姿态和位置的误差。
飞行动力学建模主要包括飞行器的动力学方程和状态方程,可以通过这些方程来描述飞行器的姿态、位置和速度等动态变化。
3.控制器设计控制器设计主要是设计一个控制算法来根据传感器测量的数据和期望的姿态和位置来控制飞行器的旋转速度和方向。
通常使用的控制算法包括PID控制器、模型预测控制器、自适应控制器等。
PID控制器是一种常用的控制算法,根据误差的大小和变化率来调整控制信号,从而使飞行器逐渐接近期望的姿态和位置。
4.电机控制四轴飞行器通常使用四个无刷电机来控制旋翼的转速和方向。
通过适当调整电机的转速,可以使飞行器产生所需的推力和力矩,从而实现期望的运动。
电机控制主要包括PWM控制信号的生成、电机转速的调节和电机的航向控制。
PWM控制信号的生成由控制器完成,根据控制器的输出调整电机转速,使旋翼产生所需的推力和力矩。
电机的航向控制通常通过改变电机的转速来实现。
总结:四轴飞行控制原理主要包括传感器感知、飞行动力学建模、控制器设计和电机控制。
通过传感器感知飞行器的角速度、线性加速度、地磁场方向和高度等信息,通过飞行动力学建模估计飞行器的姿态和位置,根据期望的姿态和位置与估计值的误差,设计控制算法来控制飞行器的旋转速度和方向,通过调整电机的转速,使飞行器产生所需的推力和力矩,从而实现期望的飞行。
四轴飞行器的飞行原理
四轴飞行器的飞行原理
四轴飞行器是一种近年来越来越流行的无人机。
它的飞行原理虽然复杂,但是我们可以简单地理解为受力平衡和控制。
首先,四轴飞行器由四个螺旋桨驱动。
它们分成两个对称的框架,对
称轴相遇并且各有两个桨叶。
每一对桨叶都以相反的方向旋转,从而
产生向上或向下的扭矩。
由于这些旋转后的力量可以在任何方向上表
现出来,并且由于它们可以以不同的速度旋转,四轴飞行器的飞行方
向可以被完全控制。
其次,四轴飞行器利用陀螺仪、加速度计和地磁仪等设备来保持平衡。
陀螺仪可以测量飞行器的转动速度,从而帮助控制器调整螺旋桨的转
速以实现平衡。
加速度计可以测量加速度,以检测飞行器的位置。
地
磁仪则可以检测磁场方向,从而确定飞行器的方向。
最后,四轴飞行器还需要一个控制器来运行上述设备。
控制器接收从
各种传感器收集的数据,并根据设定参数进行计算。
控制器将计算结
果发送给电调,以使螺旋桨转速实现平衡和控制。
综上所述,四轴飞行器的飞行原理可以概括为通过四个螺旋桨的力量
实现受力平衡,并利用陀螺仪、加速度计和地磁仪等设备保持平衡,
再通过控制器控制螺旋桨的转速实现飞行方向的控制。
四轴飞行器的飞行原理非常复杂,需要多种装置和设备的协同作用,以实现高度自由的空中飞行。
四轴飞行器控制原理简单介绍
四轴飞行器控制原理简单介绍1.姿态控制姿态控制是指控制四轴飞行器所处的空中姿态,包括横滚、俯仰和偏航。
横滚是指四轴飞行器以机体中心线为轴心向左或向右旋转;俯仰是指四轴飞行器以机体前后中心线为轴心向前或向后倾斜;偏航是指四轴飞行器以竖直轴为轴心旋转。
姿态控制可以通过四个电动马达间的配合来实现。
例如,当四轴飞行器需要向左旋转时,右侧的两个电动马达通过提高转速而左侧的两个电动马达通过降低转速,使得产生的升力不均衡,从而导致飞行器向左旋转;同样的原理,可以实现向右、向前和向后的倾斜,从而实现横滚和俯仰的控制。
偏航控制则是通过改变对角电动马达的转速来实现的。
2.高度控制高度控制是指控制四轴飞行器的飞行高度。
通常,四轴飞行器通过改变电动马达的转速来控制升力,从而控制飞行高度。
当需要升高时,四个电动马达的转速同时提高,产生更大的升力,使得飞行器上升;当需要下降时,四个电动马达的转速同时降低,减小升力,使得飞行器下降。
3.位置控制位置控制是指控制四轴飞行器在空中的位置,通常使用GPS、惯性导航系统(INS)和视觉系统来获取实时位置信息,并通过控制四个电动马达的转速来调整飞行器的位置。
位置控制通常采用反馈控制的方法,在测量到的当前位置与目标位置之间存在偏差时,通过调整电动马达的转速来减小偏差,并使飞行器逐渐趋向于目标位置。
综上所述,四轴飞行器的控制原理涉及到姿态控制、高度控制和位置控制三个方面。
通过控制四个电动马达的转速来实现姿态控制和高度控制,通过GPS、INS和视觉系统来获取位置信息,并通过反馈控制来调整飞行器的位置。
这些控制原理的运用使得四轴飞行器能够实现精准、稳定的飞行。
四轴飞行器知识简介

四轴飞行器知识什么是四轴飞行器?四轴飞行器也叫四旋翼飞行器。
通俗点说就是拥有四个独立动力旋翼的飞行器,有四个旋翼来悬停、维持姿态及平飞。
四轴飞行器是多轴飞行器其中的一种,常见的多轴飞行器有两轴,三轴,四轴,六轴,八轴或者更多轴。
四轴飞行器飞行原理重心的距离相等, 当对角两个轴产生的升力相同时能够保证力矩的平衡, 四轴不会向任何一个四轴飞行器有四个电机呈十字形排列,驱动四片桨旋转产生推力; 四个电机轴距几何中方向倾转; 而四个电机一对正转,一对反转的方式使得绕竖直轴方向旋转的反扭矩平衡,保证了四轴航向的稳定. 此飞行控制板规定四轴电机的排布方式相对应。
1,4号电机顺时针方向旋转, 2,3号电机逆时针方向旋转. 四个电机的转速做相应的变化即可实现四轴横向、纵向、竖直方向和偏航方向上的运动: 当四轴需要向前方运动时, 2,3号电机保持转速不变, 1号电机转速下降, 4号电机转速上升, 此时4号电机产生的升力大于1号电机的升力, 四轴就会沿几何中心向前倾转,桨叶升力沿纵向的分力驱动四轴向前运动. 当四轴要转向左转向时, 1,4号电机转速上升, 2,3号电机转速下降, 使向左的反扭距大于向右的反扭矩, 四轴在反扭距的作用下向左旋转.四个桨产生的推力, 超过或者低于四轴本身重力的时候能够实现竖直方向上升与下降的运动, 当桨的升力与四轴本身的重力相等的时候即实现悬停。
其他方式的运动原理与以上过程类似. 四轴飞行原理虽然简单, 但实现起来还需很多工作要做.四轴飞行器需要的零件无刷电机(4个)、电子调速器(简称电调,4个,)、螺旋桨(4个,需要2个正浆,2个反浆)、飞行控制板(常见有瑞伯达、KK等品牌)、电池(11.1v航模动力电池)、遥控器(最低四通道遥控器)、机架(非必选)、充电器(尽量选择平衡充电器)怎样知道是否能正常起飞?一切准备完毕,怎么知道可以试飞了呢,我个人建议为了避免匆忙上马,秒炸。
先拿手上试飞比较好,但要注意离身体距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四轴飞行器飞行原理
四旋翼飞行器结构
形式如图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。
其基本运动状态分别是:
(1)垂直运动;
(2)俯仰运动;
(3)滚转运动;
(4)偏航运动;
(5)前后运动;
(6)侧向运动;
在控制飞行器飞行时,有如下技术难点:
首先,在飞行过程中它不仅受到各种物理效应的作用,还很容易受到气流等外部环境的干扰,很难获得其准确的性能参数。
其次,微型四旋翼无人飞行器是一个具有六个自由度,而只有四个控制输入的欠驱动系统。
它具有多变量、非线性、强耦合和干扰敏感的特性,使得飞行控制系统的设计变得非常困难。
再次,利用陀螺进行物体姿态检测需要进行累计误差的消除,怎样建立误差模型和通过组合导航修正累积误差是一个工程难题。
这三个问题解决成功与否,是实现微型四旋翼无人飞行器自主飞行控制的关键,具有非常重要的研究价值。
下面将逐个说明飞行器的各种飞行姿态:
垂直运动——在图中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
保证四个旋翼转速同步增加或减小是垂直运动的关键。
俯仰运动——在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。
为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。
由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋
转,实现飞行器的俯仰运动。
滚转运动——与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
偏航运动——四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。
旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的来年各个旋翼转动方向相同。
反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。
在图d中,当电机1和电机3
的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
前后运动——要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。
在图e中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。
按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。
向后飞行与向前飞行正好相反。
当然在图b图c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
侧向运动——在图f中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。
以上,便是关于四轴飞行器飞行原理的一些介绍。