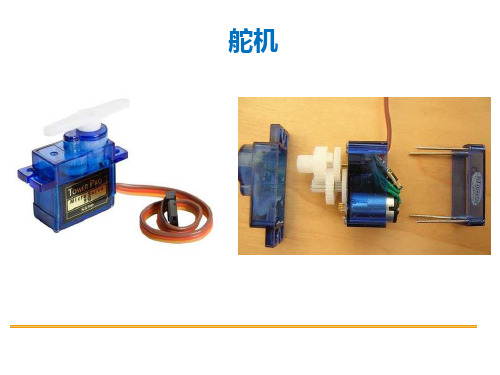
舵机
舵机工作原理
舵机工作原理舵机是一种常用于控制机械装置角度的电子元件。
它通常用于模型制作、机器人技术、遥控器系统以及其他需要精确控制角度的应用中。
舵机能够根据输入的电信号来控制输出轴的位置,并能够维持在指定的位置上。
舵机的工作原理可以简单描述为电信号控制旋转角度。
舵机通常由一个直流电动机、一对齿轮和一个反馈控制系统组成。
当输入一个控制信号给舵机时,舵机会根据信号的波形来调整输出轴的位置。
具体来说,舵机的工作原理是通过PWM(脉冲宽度调制)信号来控制。
PWM信号是一种周期性的方波信号,其占空比(脉冲宽度与周期之比)决定了舵机的转动角度。
通常,舵机的控制信号周期为20ms,其中高电平持续时间(通常0.5-2.5ms)决定了舵机的角度。
舵机内部的直流电动机通过齿轮系统将旋转运动转化为线性运动。
舵机的输出轴上有一个凸轮,连接着一个反馈系统。
当输入控制信号时,舵机电路板会根据信号的占空比对电动机进行驱动。
电动机会旋转齿轮并移动凸轮,同时反馈传感器监测输出轴的位置,将信息回传给电路板。
电路板会根据反馈信息调整控制信号以使输出轴保持在指定角度。
舵机的工作原理还包括一个关键的概念:舵机的控制范围。
舵机通常有一个工作范围,即可以控制的角度范围。
舵机的控制范围由舵机的设计以及输入的控制信号决定。
一般而言,舵机的控制范围在0到180度之间,但也有一些舵机可以实现360度的连续旋转。
需要注意的是,舵机通常需要与外部电源和控制器相连才能正常工作。
外部电源提供电力,控制器提供PWM信号控制舵机的角度。
总结而言,舵机是一种通过电信号控制旋转角度的电子元件。
它的工作原理基于PWM信号控制电动机的转动,通过齿轮系统和反馈控制来实现精确的角度控制。
舵机的控制范围通常在0到180度之间,但也有一些舵机可以实现连续360度的旋转。
因此,舵机是许多机械装置和控制系统中不可或缺的重要组件。
舵机工作原理与控制方法

舵机工作原理与控制方法舵机是一种用于控制机械装置的电机,它可以通过控制信号进行位置或角度的精确控制。
在舵机的工作原理和控制方法中,主要涉及到电机、反馈、控制电路和控制信号四个方面。
一、舵机的工作原理舵机的核心部件是一种称为可变电容的设备,它可以根据控制信号的波形来改变电容的值。
舵机可分为模拟式和数字式两种类型。
以下是模拟式舵机的工作原理:1.内部结构:模拟式舵机由电机、测速电路、可变电容和驱动电路组成。
2.基准电压:舵机工作时,系统会提供一个用于参考的基准电压。
3.控制信号:通过控制信号的波形的上升沿和下降沿来确定舵机的角度。
4.反馈:舵机内部的测速电路用于检测当前位置,从而实现位置的精确控制。
5.驱动电路:根据测速电路的反馈信号来控制电机的转动方向和速度,从而实现角度的调整。
二、舵机的控制方法舵机的控制方法一般采用脉冲宽度调制(PWM)信号来实现位置或角度的控制。
以下是舵机的两种常见控制方法:1.脉宽控制(PWM):舵机的控制信号是通过控制信号的脉冲宽度来实现的。
通常情况下,舵机的控制信号由一系列周期为20毫秒(ms)的脉冲组成,脉冲的高电平部分的宽度决定了舵机的位置或角度。
典型的舵机控制信号范围是1ms到2ms,其中1ms对应一个极限位置,2ms对应另一个极限位置,1.5ms对应中立位置。
2.串行总线(如I2C或串行通信):一些舵机还支持通过串行总线进行控制,这些舵机通常具有内置的电路来解码接收到的串行信号,并驱动电机转动到相应的位置。
这种控制方法可以实现多个舵机的同时控制,并且可以在不同的控制器之间进行通信。
三、舵机的控制电路与控制信号1.控制电路:舵机的控制电路通常由微控制器(如Arduino)、驱动电路和电源组成。
微控制器用于生成控制信号,驱动电路用于放大和处理控制信号,电源则为舵机提供所需的电能。
2.控制信号的生成:控制信号可以通过软件或硬件生成。
用于舵机的软件库通常提供一个函数来方便地生成适当的控制信号。
舵机占空比

舵机占空比
1 舵机占空比的定义
舵机是一种常用的控制器件,它可以通过控制信号的占空比来控制舵机的转动角度。
舵机占空比是指控制信号中高电平的时间占整个周期的比例,通常用百分
比表示。
2 舵机占空比的控制方法
舵机占空比的控制方法主要有两种:PWM控制和PPM控制。
PWM控制是指通过改变控制信号中高电平的时间来控制舵机的转动角度。
通
常情况下,舵机的占空比范围为5%~10%。
当占空比为5%时,舵机会转动到最左
边的位置;当占空比为10%时,舵机会转动到最右边的位置;当占空比为7.5%时,舵机会转动到中间位置。
PPM控制是指通过改变控制信号中脉冲的个数来控制舵机的转动角度。
通常
情况下,每个脉冲的宽度为1ms~2ms,每个脉冲之间的间隔为20ms~30ms。
舵机
的转动角度与脉冲的个数有关,通常情况下,一个脉冲对应着一个转动角度。
3 舵机占空比的应用
舵机占空比广泛应用于无人机、机器人、船舶、汽车等控制系统中。
例如,无人机的姿态控制系统中,通过改变舵机的占空比来控制无人机的俯仰、横滚和偏航角度;机器人的运动控制系统中,通过改变舵机的占空比来控制机器人的运动方向和速度;汽车的转向系统中,通过改变舵机的占空比来控制车轮的转向角度。
4 舵机占空比的注意事项
在使用舵机的过程中,需要注意以下几点:
1. 控制信号的频率应该与舵机的工作频率相匹配;
2. 控制信号的占空比应该在舵机的工作范围内;
3. 控制信号的电平应该与舵机的电压要求相匹配;
4. 在控制信号改变时,应该保证舵机的机械结构不会受到过大的冲击。
舵机工作原理
引言概述:舵机是一种常用于机械控制系统中的装置,主要用于控制运动装置的旋转或线性运动。
它在航空、机械工程、汽车、无人机等领域中都有广泛的应用。
本文将详细介绍舵机的工作原理,包括其结构、原理、控制信号等方面的内容。
正文:一、舵机的基本结构舵机通常由电机、减速器、位置传感器和电子控制电路等组成。
1. 电机:舵机一般采用直流电机,包括转子和定子。
电机通过转动来控制舵机的位置。
2. 减速器:舵机中的减速器用于减小电机的转速,并通过齿轮和齿条等机械传动装置将转动转化为线性或旋转运动。
3. 位置传感器:舵机常用的位置传感器有光电传感器和磁性传感器等,用于测量舵机的位置并反馈给电子控制电路。
4. 电子控制电路:舵机的电子控制电路负责接收控制信号,并根据控制信号控制电机和减速器的运转。
二、舵机的工作原理1. 控制信号输入:舵机的工作由控制信号决定,控制信号一般为脉冲宽度调制(PWM)信号。
信号的脉宽决定了舵机的位置。
2. 位置控制:控制信号被电子控制电路接收后,经过一定的处理,电子控制电路会根据控制信号的脉宽决定舵机的位置。
3. 反馈控制:舵机的位置传感器会不断测量舵机的位置,并将测量结果反馈给电子控制电路。
电子控制电路通过与目标位置的比较,调整电机和减速器的运转,以实现舵机的稳定控制。
4. 输出控制:根据电子控制电路的控制信号,舵机的电机和减速器会运转,从而实现位置的控制。
三、舵机的控制信号1. 脉宽范围:舵机的控制信号通常具有一个特定的脉宽范围,一般为1ms到2ms之间。
脉宽的最小值和最大值对应舵机的最左和最右位置。
2. 中立位置:控制信号的脉宽为舵机的中立位置。
舵机通过将控制信号设置为中立位置,可以保持在中间位置不动。
3. 工作速度:舵机的工作速度受控制信号的脉宽变化速度影响,脉宽变化越快,舵机的响应速度越快。
4. 工作精度:舵机的工作精度由控制信号和位置传感器的精度共同决定,控制信号的精度越高,舵机的工作精度越高。
舵机和轴的连接方法有哪些

舵机和轴的连接方法有哪些
舵机与轴是机械系统中常见的连接方式之一。
舵机通常用于控制机械运动,而轴则是机械中的旋转部件。
舵机和轴的连接方法有多种,下面将介绍一些常见的连接方式。
1. 螺纹连接:螺纹连接是最常见的连接方式之一。
它通过在舵机轴和轴承上切割或加工出一定的螺纹来实现连接。
这种连接方式可以提供较高的连接强度,但安装和拆卸比较麻烦。
2. 键连接:键连接是一种常用的连接方式,适用于需要传递较大扭矩的场合。
它通过在舵机轴和轴承上加工出相应的键槽,再插入一个与键槽匹配的键来实现连接。
这种连接方式具有较高的传动效率和精度,但在使用过程中需要保持键和槽的配合间隙。
3. 锥形连接:锥形连接是一种通过锥形套筒将舵机轴与轴承连接的方式。
舵机轴和轴承的端面都形成一个锥形,在连接时将套筒插入锥形孔中,通过紧固螺母或法兰盘将其固定。
这种连接方式适用于需要经常拆卸和安装的场合,具有较好的可靠性和刚性。
4. 弹性连接:弹性连接是一种常见的连接方式,通过将舵机轴和轴承之间加入弹性元件来实现连接。
常见的弹性元件包括齿轮、联轴器、橡胶套等。
这种连接方式可以吸收轴与轴之间的偏差和振动,减小对轴承的负荷,延长轴承寿命。
舵机和轴的连接方法还有很多其他的方式,如销连接、卡口连接、自锁连接等。
不同的连接方式适用于不同的机械系统和应用场景,选择合适的连接方式可以提高系统的可靠性和性能。
总结起来,舵机和轴的连接方式有螺纹连接、键连接、锥形连接、弹性连接等。
在实际应用中,我们需要根据具体情况选择合适的连接方式,以确保连接的可靠性和稳定性。
无人机结构与系统课件:舵机
4.3.4舵机的性能参数
(3)电压 舵机推荐的电压一般都是4.8V或6V。当然,有的 舵机可以在7V以上工作,比如12V的舵机也不少。 较高的电压可以提高电机的速度和扭矩。选择舵 机还需要看我们的控制卡所能提供的电压。 (4)尺寸、重量和材质 舵机的功率(速度×转矩)和舵机的尺寸比值可 以理解为该舵机的功率密度,一般同样品牌的舵 机,功率密度大的价格高。
舵机的齿轮箱有塑料齿轮、混合齿轮、金属齿轮。 塑料齿轮成本底,噪音小,但强度较低;金属齿轮 强度高,但成本高,在装配精度一般的情况下会有 很大的噪音。小扭矩舵机、微舵、扭矩大但功率密 度小的舵机一般都用塑料齿轮,如Futaba 3003, 辉盛的9g微舵。金属齿轮一般用于功率密度较高 的舵机上,比如辉盛的995舵机。Hitec甚至用钛 合金作为齿轮材料,其高强度能保证3003大小的 舵机能提供20几公斤的扭矩。混合齿轮在金属齿 轮和塑料齿轮间做了折中,在电机输出齿轮上扭矩 一般不大,用塑料齿轮。
舵机
4.3.1、概述
舵机是一种位置(角度)伺服的驱动器,适用 于那些需要角度不断变化并可以保持的控制系 统。 早期在模型上使用最多,主要用于控制模型的 舵面,所以俗称舵机。控制方式是闭环控制, 所以舵机更准确的说是伺服马达,英文servo。
4.3.1 、概述
目前,在高档遥控玩具,如飞机、潜艇模型,遥控机 器人中已经得到了普遍应用。
模拟舵机需要一个外部控制器(遥控器的接收机)产生脉 宽调制信号来告诉舵机转动角度,脉冲宽度是舵机控制器 所需的编码信息。
PWM信号
4.3.4舵机的性能参数
(1)转速 由舵机无负载的情况下转过60°角所需时间来衡 量,常见舵机的速度一般在0.11~0.21S/60°之 间。
舵机怎么控制

舵机怎么控制舵机的控制是机器人控制中非常重要的一部分。
舵机可以通过向机器人的连接部件施加力矩,从而控制其运动和姿态。
本论文将分为四个章节,分别介绍舵机的工作原理、舵机的控制方式、舵机的应用和未来的趋势。
第一章:舵机的工作原理舵机是一种通过转动轴来控制输出角度的电动装置。
它由电机、减速器和控制电路组成。
当电机转动时,减速器将输出转矩传递给连接部件,使其移动到所需的位置。
舵机的工作原理基于反馈控制系统,其中控制电路通过传感器准确测量当前位置,并根据设定值产生控制信号,使舵机转动到精确的角度。
第二章:舵机的控制方式舵机的控制方式主要有两种:开环和闭环控制。
开环控制是指通过简单的控制信号来直接控制舵机。
这种控制方式简单易行,但可控性较差,难以精确控制舵机的输出角度。
闭环控制是指通过反馈信号来实时调整控制信号,使舵机精确转动到所需的位置。
闭环控制具有较高的控制精度,但也更加复杂,需要使用传感器来获取反馈信号。
第三章:舵机的应用舵机广泛应用于机器人、航空航天、航海、汽车和工业自动化等领域。
在机器人领域,舵机用于控制机器人的关节运动,使其具备更加精确和灵活的动作能力。
在航空航天领域,舵机用于控制飞行器的姿态和稳定性,确保飞行器在空中的平稳飞行。
在航海领域,舵机用于控制船舶的航向,使船舶能够准确地按照预定航线行驶。
在汽车领域,舵机用于控制汽车的转向,使驾驶人能够轻松操作车辆。
在工业自动化领域,舵机用于控制机械臂和其他运动装置的运动,实现精确的运动控制。
第四章:舵机的未来趋势随着技术的发展,舵机的控制将更加精确和智能化。
传感器技术的不断进步将使得舵机能够获得更加准确的反馈信号。
此外,人工智能和机器学习算法的应用也将提高舵机的控制精度和适应性。
未来,舵机有望成为机器人控制系统中更加重要的一部分,为机器人带来更高的运动和操作能力。
总结:舵机是机器人控制中不可或缺的一部分。
本论文从舵机的工作原理、控制方式、应用和未来的趋势等四个方面进行了介绍。
舵机工作原理
舵机工作原理
舵机是一种常见的电机装置,它通过收到控制信号来精确控制输出轴的位置。
舵机是一种闭环控制系统,它由电机、位置反馈装置、控制电路和输出轴组成。
下面将详细介绍舵机的工作原理。
首先,舵机内部的电源供电,将电能转化为机械能。
电源通电后,控制电路将控制信号转换为相应的电流控制电机工作。
舵机内部的电机是一种直流电机,通常是核心式或无心式电机。
电流经过电机,产生磁场作用于电机的定子和转子。
位置反馈装置是舵机的一个重要组成部分,其作用是实时感应输出轴的位置,并将这一信息反馈给控制电路。
位置反馈装置通常采用旋转变阻器或光电编码器等传感器。
当输出轴发生偏离时,位置反馈装置将感知到并将偏差信息传递给控制电路。
控制电路根据接收到的控制信号和位置反馈信息,进行逻辑计算和补偿控制。
控制电路将根据偏差信息,调节电流的大小和方向,使输出轴恢复到期望的位置。
通过控制电路输出的电流调节电机的转动力矩,以实现输出轴的准确位置控制。
当输出轴达到期望位置后,位置反馈装置将停止向控制电路发送偏差信息,控制电路也停止调节电流,保持输出轴的稳定位置。
总之,舵机的工作原理是通过电源供电,控制信号经过控制电
路转换为控制电流,作用于电机产生力矩,通过位置反馈装置感知输出轴的位置,并根据偏差信息进行控制电流的调节,最终实现输出轴的精确位置控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的舵机控制
时间:2007-08-14 来源: 作者:时玮 点击: 2954 字体大小:【大 中 小】
基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根据不同的舵
机数量加以灵活应用。
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统
和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接
口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工
作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个
基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器
的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求
如图1所示。
图1 舵机的控制要求
单片机实现舵机转角控制
可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。
对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电
压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和
功耗考虑也不易采用。5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控
系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机
的控制精度要求。
也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而
提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为 PWM信号输出到舵机,
由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较
小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM
周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号
的输出,并且调整占空比。当系统中只需要实现一个舵机的控制,采用的控制方式是改变单
片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时
中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。
具体的设计过程:
例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所
以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断
程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,
再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM
信号输出到舵机。用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便
可使伺服机灵活运动。
为保证软件在定时中断里采集其他信号,并且使发生PWM信号的程序不影响中断程序的
运行(如果这些程序所占用时间过长,有可能会发生中断程序还未结束,下次中断又到来的
后果),所以需要将采集信号的函数放在长定时中断过程中执行,也就是说每经过两次中断
执行一次这些程序,执行的周期还是20ms。软件流程如图2所示。
图2 产生PWM信号的软件流程
如果系统中需要控制几个舵机的准确转动,可以用单片机和计数器进行脉冲计数产生PWM
信号。
脉冲计数可以利用51单片机的内部计数器来实现,但是从软件系统的稳定性和程序结构的
合理性看,宜使用外部的计数器,还可以提高CPU的工作效率。实验后从精度上考虑,对
于FUTABA系列的接收机,当采用1MHz的外部晶振时,其控制电压幅值的变化为0.6mV,
而且不会出现误差积累,可以满足控制舵机的要求。最后考虑数字系统的离散误差,经估算
误差的范围在±0.3%内,所以采用单片机和8253、8254这样的计数器芯片的PWM信号产
生电路是可靠的。图3是硬件连接图。
图3 PWA信号的计数和输出电路(点击放大)
基于8253产生PWM信号的程序主要包括三方面内容:一是定义8253寄存器的地址,二是
控制字的写入,三是数据的写入。软件流程如图4所示,具体代码如下。
//关键程序及注释:
//定时器T0中断,向8253发送控制字和数据
void T0Int() interrupt 1
{
TH0 = 0xB1;
TL0 = 0xE0; //20ms的时钟基准
//先写入控制字,再写入计数值
SERVO0 = 0x30; //选择计数器0,写入控制字
PWM0 = BUF0L; //先写低,后写高
PWM0 = BUF0H;
SERVO1 = 0x70; //选择计数器1,写入控制字
PWM1 = BUF1L;
PWM1 = BUF1H;
SERVO2 = 0xB0; //选择计数器2,写入控制字
PWM2 = BUF2L;
PWM2 = BUF2H;
}
图4 基于8253产生PWA信号的软件流程
当系统的主要工作任务就是控制多舵机的工作,并且使用的舵机工作周期均为20ms时,要
求硬件产生的多路PWM波的周期也相同。使用51单片机的内部定时器产生脉冲计数,一
般工作正脉冲宽度小于周期的1/8,这样可以在1个周期内分时启动各路PWM波的上升沿,
再利用定时器中断T0确定各路PWM波的输出宽度,定时器中断T1控制20ms的基准时间。
第1次定时器中断T0按20ms的 1/8设置初值,并设置输出I/O口,第1次T0定时中断响应
后,将当前输出I/O口对应的引脚输出置高电平,设置该路输出正脉冲宽度,并启动第2次
定时器中断,输出I/O口指向下一个输出口。第2次定时器定时时间结束后,将当前输出引
脚置低电平,设置此中断周期为20ms的1/8减去正脉冲的时间,此路 PWM信号在该周期
中输出完毕,往复输出。在每次循环的第16次(2×8=16)中断实行关定时中断T0的操作,最
后就可以实现8路舵机控制信号的输出。
也可以采用外部计数器进行多路舵机的控制,但是因为常见的8253、8254芯片都只有3个
计数器,所以当系统需要产生多路PWM信号时,使用上述方法可以减少电路,降低成本,
也可以达到较高的精度。调试时注意到由于程序中脉冲宽度的调整是靠调整定时器的初值,
中断程序也被分成了8个状态周期,并且需要严格的周期循环,而且运行其他中断程序代码
的时间需要严格把握。
在实际应用中,采用51单片机简单方便地实现了舵机控制需要的PWM信号。对机器人舵
机控制的测试表明,舵机控制系统工作稳定,PWM占空比 (0.5~2.5ms 的正脉冲宽度)
和舵机的转角(-90°~90°)线性度较好。