基于模糊控制算法实现信号灯智能化研究
基于模糊控制的智能交通灯监控系统的设计方案
基于模糊控制的智能交通灯监控系统的毕业设计城市道路错综复杂,相互交错,交通灯是城市交通的重要指挥系统。
交通信号灯作为管制交通流量、提高道路通行能力的有效手段,对减少交通事故有明显效果。
但是车流量是随时变化的,而传统的交通灯模式采用的是定时控制,反而容易造成交通堵塞。
因此我们需要根据不同的交通路况设置通行时间,本文采用模糊控制算法,设计了一种智能交通灯监控系统。
1、总体方案交通灯监控系统是一个分布式、集散型、网络化的监控系统,包括监控中心和若干个智能监测终端,能对独立分布的交通灯进行集中监控和维护管理。
每个路口看成一个监控终端,都设有一个采集器和一个GPRS模块,而每个方向上都装有一个控制器。
控制器用来直接控制交通灯的状态、时间显示屏以及获得各车道车辆信息;采集器用来获取下属的每个控制器的数据以及发送控制命令。
采集器将采集到的数据通过GPRS网络发送到监控中心,在监控中心对数据进行分析,进而实现对路况的监控。
在此采用模糊控制算法对车辆数据进行分析,实现对红绿灯的控制。
2、模糊控制算法设计模糊控制是将人们的长期经验作为控制策略,并将它转化成机器可识别的自然语言,进而实现自动控制。
在文中,将人对交通指挥策略语言转化为机器语言所描述的控制算法,使得该算法能够模拟人的思维对各个车道的时间分配问题进行很好地分析,从而实现红绿灯时间的可变控制。
对一个十字路口来说一个周期分为四个相位,如图1所示(①:东至西,西至东,西至南,东至北;②:西至北,东至南;③:南至北,北至南,南至东,北至西;④:北至东,南至西)。
图1 十字路口2.1、输入和输出变量定义模糊控制的语言变量是对于输入变量和输出变量而言的,它们是自然语言形式,而不是数值形式给出的变量,选择当前相位等待车辆平均数和下一相位车辆等待平均数为输入变量,当前相位绿灯延时时间为输出语言变量,这样,就选择了一个双输入单输出的二维模糊控制器,如图2所示。
图2 双输入单输出模型图中,X1:当前相位总车辆数/车道数(取整);X2:下一相位总车辆数/车道数(取整);Y:当前相位绿灯显示时间。
结合模糊控制的深度强化学习交通灯控制策略
结合模糊控制的深度强化学习交通灯控制策略传统的交通信号灯控制策略往往是基于时间间隔或车辆流量等经验规则进行设计的。
然而,这种设计方式无法适应现实道路交通的复杂性和多变性,导致交通拥堵和交通效率低下的问题。
为了解决这一问题,研究人员提出了基于深度强化学习的交通灯控制策略,以提高交通流量的流畅性和整体交通效率。
与此同时,模糊控制技术也被引入到交通灯控制中,以应对交通信号灯控制策略的模糊性和不确定性。
本文将结合模糊控制的深度强化学习交通灯控制策略进行综述。
1. 深度强化学习在交通灯控制中的应用深度强化学习是将深度学习和强化学习相结合的一种方法。
通过建立一个深度神经网络模型,结合强化学习的概念和算法,使得交通灯控制系统能够根据当前的交通状态来选择最优的交通灯状态。
深度强化学习在交通灯控制中的应用可以按照以下步骤进行:(1)建立环境模型:将交通路口及周围的道路和车辆等信息转化为输入特征,构建交通灯控制系统的环境模型;(2)定义交通灯控制策略:利用深度强化学习算法,定义交通灯控制策略的动作空间和状态空间;(3)训练深度强化学习模型:通过与环境交互和奖励机制,训练深度强化学习模型,使其能够根据当前状态选择最优的交通灯控制策略;(4)测试和优化:将训练好的深度强化学习模型用于实际交通灯控制场景中进行测试,并根据测试结果对模型进行优化。
2. 模糊控制在交通灯控制中的应用模糊控制是一种能够处理模糊信息和不确定性的控制方法。
在交通灯控制中,由于交通流量的变化和交通信号的多样性,交通灯控制策略往往是模糊的。
因此,模糊控制技术被引入到交通灯控制中,以应对这种模糊性和不确定性。
模糊控制在交通灯控制中的应用可以按照以下步骤进行:(1)建立模糊控制规则库:根据交通灯控制的经验规则和交通流量的变化规律,建立模糊控制规则库;(2)定义输入输出变量:将交通流量、道路拥堵等信息转化为模糊变量,并定义输出变量表示交通灯的状态;(3)进行模糊推理:根据当前的交通状态和模糊规则库,进行模糊推理,得到当前交通灯的控制策略;(4)优化和调整:根据实际的交通流量和交通效率等指标,对模糊控制规则库进行优化和调整,以提高交通灯控制的效果。
基于模糊控制的智能交通信号控制优化研究

基于模糊控制的智能交通信号控制优化研究近年来,随着城市人口的不断增长,交通问题逐渐成为困扰社会发展的一大难题。
而交通信号控制系统作为城市交通实现自由流动和有效治堵的重要技术手段,扮演着至关重要的角色。
但传统交通信号控制方案往往只能处理一部分交通需求,难以满足不同时间段、不同地点和不同路段交通流量的变化。
因此,在如今智慧城市建设的背景下,基于模糊控制的智能交通信号控制呼之欲出。
一、模糊控制的基本原理模糊控制是一种非精确、非线性、非确定性控制方法,适用于复杂系统的控制。
在基本模糊控制系统中,输入与输出都是模糊集合,通过模糊规则库、模糊推理和模糊输出等步骤实现控制。
模糊控制方法能够处理一些具有不确定性和模糊性的问题,如语音识别和图像处理等领域。
因此,在智能交通信号控制方面也有了广泛的应用。
二、模糊控制在智能交通信号控制中的应用智能交通信号控制中模糊控制的应用主要包括以下几个方面:(1)基于模糊推理的信号控制策略模糊推理是模糊控制的核心技术之一,用于推导交通状态、路段负荷、交通需求等信息,从而制定适合的信号控制策略。
在传统信号控制中,由于无法精确地测量交通流量和路段占用率等信息,难以调整信号周期和绿灯时间。
但利用模糊推理技术,可以获取交通流量、车速、密度和稳定性等信息,从而实现绿灯时间的自适应变化,减少交通拥堵和延误。
(2)基于模糊控制器的信号控制方案针对复杂的路口情况和交通流动性变化,传统的信号控制器往往无法满足需求。
而基于模糊控制器的信号控制方案不需要预先知道全部情况将如何涉及信号控制。
智能交通信号控制采用模糊控制器,便能根据路段状况和交通流量,动态调整绿灯时间和车速,使交通流动更加顺畅。
例如,通过对道路堵塞状况的判断,来决定绿灯时间的加长或者减短,有效地优化了路口能力,提高了通行效率。
(3)基于模糊决策的周期性信号控制周期性信号控制是一种优化交通流的方式,但其传统控制方法存在无法适应交通流变化的问题。
模糊控制实际应用研究
模糊控制实际应用研究模糊控制是一种基于模糊逻辑的控制方法,它可以在模糊的环境中进行决策和控制,其核心思想就是用人类的经验和语言来描述系统。
在实际应用中,模糊控制被广泛应用于各种领域,比如工业控制、智能交通、机器人控制、医疗、金融等。
本文将从几个方面介绍模糊控制在实际应用中的研究进展和应用案例。
一、工业控制在工业生产中,模糊控制被广泛应用于生产流程控制、机器人控制、自适应控制等方面。
其中,以炼油、化工、冶金等高危行业为代表的控制系统,风险高、控制难度大,传统控制方法难以适应。
而模糊控制正是满足了这种场景下的特殊需要。
例如,对于温度、压力等参数的控制,传统控制方法需要传感器读取实时数据,根据PID算法进行计算和调整,但是这样的调节方法需要不断地“试错”,耗费时间和人力。
相比之下,模糊控制的优势就体现出来了。
它不需要提前确定具体的输入量、输出量以及参数,只需要用文字传达控制要求,系统便可以自动地“学习”调节方法,从而提供最优的控制方案。
二、智能交通随着城市化进程的加速,城市交通越来越拥堵,安全问题也愈发凸显。
智能交通系统就是为了解决城市交通压力和安全问题而出现的。
模糊控制在智能交通系统中也起到了重要的作用。
首先,模糊控制可以对交通信号灯进行控制,提高交通流量,并降低交通拥堵。
其次,模糊控制可以结合路况、气象等不同因素,对车辆行驶速度进行控制,提高整个道路网络的通行效率,从而减轻交通拥堵的程度。
最后,模糊控制还可以根据路段交通的实时情况,对城市路网进行动态优化,从而使整个交通系统更加智能化、高效化。
三、机器人控制机器人技术是当代科技领域的一个热点,而机器人控制是机器人技术中的一个重要分支。
机器人控制的核心是对机器人进行快速、准确的控制,以达到预期的效果。
模糊控制在机器人控制中的应用也非常广泛。
比如在工业机器人的控制中,可以通过模糊控制对机器人的运动和运行参数进行灵活控制,从而实现自适应控制。
同时,模糊控制也可以应用于机器人的智能决策中,使其能够自主化地进行决策和行动。
基于模糊原理的城市交通信号灯控制方法的研究
发 展 的阶段 。
为 了快 速 有 效 的改 善 城 市道 路 通行 状 况 , 了 除
交通部门修路改善交通外 , 对交通信号灯 的控制 已 成 为现代 城市 交通 监控 指挥 系统 中重要 的组 成部 分
和技 术手段 。对 唐 山这 样 的 一个 城 市 而 言 , 是 较 也
为经 济 和中, 定时信号灯是为了保证不同 方 向相交车 流或 行人 能 安全 的通 过交 叉 路 口。随着 交通需求的持续增加 , 定时交通信号灯不能随着交通 流量大小适 时变化 , 因此信号灯 必须 以最优控 制策 略
存在, 以减小道路 网络 中所有 车辆 的运行 时问 。 本 文是 为 了让在信 号灯 的运 行 能根据 各个 路 口 的车 流量大 小适 时调整 。图 1中传感 器一 般布 置在 远离路 口位置 , 样 不 仅 能统 计 流 量 还 能 统计 出在 这
{ = A n = B }te = , a d Y h nz i= 1 ,
2, 4… … 3,
() 出变量即当前信号绿灯延时时间也被看 3输 作模糊 变量 G , 论域 为; 36 9 1 ,5 1 ,1 其 { ,,,2 1 ,82 ,
2 ,7 ,量 化 因 子 为 K = 087个 语 言 值 为 : 42 } .,
通运输 的服 务 系统 。它 的 突 出 特 点 是 以信 息 的 收 集、 理、 处 发布 、 交换 、 分析 、 利用 为 主线 , 通过 及时 传 递交通 信息 , 交通参 与 者提供 “ 隙 ” 为 无 的交通 服务 。 各级交 通部 门也 在 该方 面做 了较 大 的努 力 , 划并 筹 初步建 立 了信息 查询 , 电子 监控 、 广播 信息 传递 等 系 统 。这 些系统 亦 是 智 能交 通 系统 发 展 的初 级 阶段 ,
交通信号灯的模糊智能控制
交通信号灯的模糊智能控制摘要:传统的十字路口交通信号灯,是将两个方向红绿灯的延时预先设置好,然而实际上车流量的变化往往是不确定的,有的路口在不同的时段甚至可能产生很大的差异。
文章采用PLC对交通灯进行模糊控制,利用车流量来控制红绿灯的延时时间,其控制效果要比定周期法明显,尤其适用在车流量比较大的交叉路口。
标签:PLC 模糊控制传感器传统的十字路口交通控制灯,通常的做法是:事先经过车辆流量的调查,运用统计的方法将两个方向红绿灯的延时预先设置好。
然而,实际上车辆流量的变化往往是不确定的,有的路口在不同的时段甚至可能产生很大的差异。
即使是经过长期运行、较适用的方案,仍然会发生这样的现象:绿灯方向几乎没有什么车辆,而红灯方向却排着长队等候通过。
这种流量变化的偶然性是无法建立准确模型的,统计的方法已不能适应迅猛发展的交通现状计,用PLC对道路十字路口交通灯进行自适应模糊控制的方法,较好地解决了车辆流量不均衡、不稳定的问题。
一、交通十字路口传感器的设置在十字路口的4个方向(e、s、w、n)的近端j(斑马线附近)和远程y(距斑马线约50米处)各设置一个红外线传感器,分别统计通过该处的车辆数(见图1)。
近端的传感器用于记录绿灯期间通过路口的车辆数(记为x);远程的传感器用于记录进入路口的车辆数(记为y)。
而实际等候车辆为(y-x)辆。
二、模糊控制器的设计本系统设计的核心是模糊控制器,设计模糊控制器主要是求取模糊控制表。
(一)系统分析确定控制器的输入变量和输出变量以及它们的数值变化范围。
输入变量为x、y,输出变量为t。
绿灯期间车辆通过路口的速度不超过20公里/小时,则在15秒时间内通过的最大车辆数约为15辆。
则x的变化范围为0-15。
当远程和近端传感器之间距离约为50米时,考虑一般车辆车身长度连同两车辆间距平均5米左右,所以100米内可能停留等待的车辆数最多可达到50/5=10辆,于是红灯方向排队等待的车辆数y变化范围为0-10。
基于模糊控制技术的智能交通信号控制方法研究
基于模糊控制技术的智能交通信号控制方法研究智能交通信号控制是交通工程领域中的一个重要研究方向。
随着城市交通流量的增加和道路交通拥堵问题的日益严重,如何通过智能化方法来提高交通信号系统的效能和运行效果成为了一个急需解决的问题。
本文将基于模糊控制技术来研究智能交通信号控制方法,探讨其在提高交通流量及减少拥堵等方面的应用。
智能交通信号控制是一种基于交通情况动态调整信号灯时长的方法,以实现交通流量的优化和最大化。
模糊控制技术是一种通过建立模糊规则和模糊推理来处理不确定因素的有效方法。
所以将模糊控制技术应用在智能交通信号控制中,可以更好地应对道路交通流量的快速变化和复杂性。
首先,本研究将采集交通流量、车辆速度及密度等实时交通数据,并通过数据处理和分析得出当前的交通状况。
然后,将这些数据作为输入,建立模糊控制系统的输入变量,如车辆密度、交通流量等,并设计适当的隶属函数和模糊规则库来描述不确定因素。
通过采用模糊推理和模糊化输出方法,确定控制器的输出,即交通信号灯的相位和时长。
其次,为了提高交通信号的控制效果,本文引入了模糊PID控制算法。
PID控制算法是一种常用的控制算法,可以根据反馈信号和参考信号之间的差异来调整控制量,以实现系统的稳定和优化。
而模糊PID控制算法则通过结合模糊控制和PID控制的特点,使得控制过程更加灵活和智能。
再次,本研究基于模糊PID控制算法设计了智能交通信号控制器,并通过实际交通数据的仿真实验来验证其性能。
实验结果表明,相比传统的定时交通信号控制方法,基于模糊控制技术的智能交通信号控制方法在交通流量的优化和拥堵缓解方面具有显著的优势。
最后,本文对基于模糊控制技术的智能交通信号控制方法进行了总结和展望。
虽然模糊控制技术在交通信号控制中取得了一定的成果,但仍然存在一些局限性和挑战。
未来的研究应该进一步完善模糊控制算法,提高交通信号控制系统的智能化程度,同时结合其他优化算法,如遗传算法和神经网络等,来进一步提高交通信号控制的效果。
基于模糊控制的智能交通灯控制技术研究
基于模糊控制的智能交通灯控制技术研究随着城市化的不断加速,交通问题也愈发凸显。
而智能交通系统的兴起,成为了缓解交通压力的有效途径之一。
而智能交通中的交通灯控制则成为了其中的重要组成部分。
在传统的交通灯控制系统中,车辆和人群的流量是以预测的方式来进行调控,但是事实上车辆和人群的流量是非常复杂和不确定的。
这导致了传统的控制系统难以适应复杂的交通流,因此开发一种能够根据实际交通情况智能调整的控制系统就成为了一项重要的研究工作。
基于模糊控制技术的智能交通灯控制系统,可以实时地对路口的交通流量、等待时间、车速等因素进行多维度考虑,并根据实际情况进行灵活调整。
该系统主要包括三个模块:输入模块、输出模块和控制模块。
输入模块用于收集交通流等相关数据,以此基础上计算出相应的控制量,输出模块则将计算结果反馈给控制模块进行控制。
在智能交通灯控制系统中,输入模块是关键部分。
它通过接收交通流量、行驶速度、等待时间等数据信息,将实际数据与预设值进行比较,按一定算法处理后反馈给下一个控制模块。
输入模块设计中最基本的就是信息的采集,对于交通流量信息的采集,可通过安装磁探测器、光电传感器等方式进行实时监测。
这样可获取车流量、人流量和行人数量等数据信息。
对于车速信息的采集,则可以通过车牌识别等方式获取,以此反映尽可能准确的路面交通情况。
输出模块的设计通常包括两个方面:输出控制命令和输出控制参数。
其中输出控制命令是将控制信号传给流量控制器进行灯色控制的具体命令,输出控制参数则包括当前灯的状态、灯的运行时间等控制参数。
同时,在输出模块中还需要将预处理的数据做合理的归一化处理,判断不同指标的权重,计算出合适的控制量。
控制模块则是智能交通灯控制系统的核心部分,模糊控制技术也是由此得名。
它是智能交通灯控制系统的灵魂。
其中模糊控制技术是一种将输入数据(或其它数据)转化为模糊性输入的过程,通过转化得到的模糊语句规则对输入数据进行模糊逻辑处理,以得到已工程化的控制量输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
位 , 以让更需要通行的相位通行 。如当前相位队
长 Li 少于下一相位队长 Li+1 , 但用时很短 , 则不 能转到下一相位 , 以免相位过早转换 。因此对多
相位控制系统 , 既要避免某一相位长时间占用绿
灯时间 , 又要防止绿灯信号的早断 , 为做到这一
点 , 排队队长之差 △L =L i - L i + 1和绿灯所用时间是 重要的参数 。为此 △L 和最大绿灯时间 Tgmax与当前 相位已用时之差 △t作为模糊控制的输入量 , 以 C
1 系统总体结构
2 信号灯模糊控制基本原理
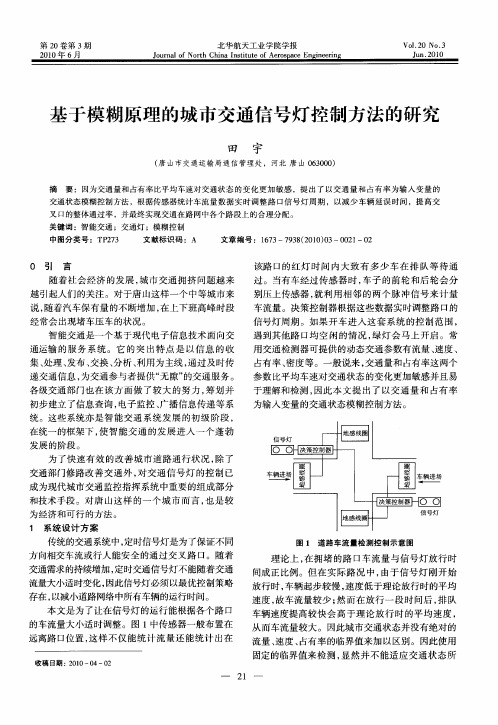
在城市交通信号灯系统平面交叉口的点控制中 信号灯的周期 、绿信比是被控对象 , 交叉路口各方 向停车线前面排队的车辆是控制参量 。即根据四相 位平面交叉口交通系统的特点设计模糊控制系统 , 以路面的实际车辆长度为输入量 , 输出量为实际控 制延长的绿灯时间 , 最终实现平面交叉口的信号灯 的控制 。基本原理结构 , 如图 1所示 [ 1 ] 。
协议 ·算法及仿真
王史春 : 基于模糊控制算法实现信号灯智能化研究
5 模糊控制器的设计
511 初始绿灯模糊化控制
模糊控制器的输入变量为相位的 Li , 其变化范
围为 1~30 Y; 输出为 Gs , 根据现场测试 , 输出变 量 t的变化范围为 15~60, 它们的论域分别为 ( 1,
2, 3, 4, 5, 6) , ( 1, 2, 3, 4, 5 ) , 量化因子分
别为 0118和 0109。量化因子 (把清晰值从物理论
域 X, 变换 (映射 )到模糊论域 N 上的变换系数 )和
比例因子 (经过推理得出的是模糊量 , 需要经过清
晰化模块的处理变成清晰量 , 才能推动后面的的
机构 。这个清晰化论域与需求的物理论域未必一
致 , 需要进行变换 ) , 比例因子为 019, 模糊集都
3 交通信号灯控制算法及实施步骤
一个经验丰富的交警通常是按照直接观察到的 车辆排队长度进行交通指挥的 。在某一相位的放行 过程中 , 除了尽可能消除当前通行的车队队长外 , 他会不断观察下一个相位车道上的车队长短 , 综合 考虑是否把通行权交给下一个相位 。因此 , 把队长 作为控制目标 , 综合考虑各车道上车队长度 , 以此 来决定绿时分配的模糊控制方法更接近人的决策过 程 。在车辆稀疏的情况下 , 信号周期尽量短 , 以免 无通行权相位的车辆等待时间过长而造成较大延误 和排队 。但又不能过短 , 以免通行方向的车辆来不 及通过路口影响交通安全 , 同时也给行人和非机动 车一些过长时间 ; 当交通流较大时 , 加大信号周 期 , 以减少相位转换的损失时间 , 提高路口通过 率 , 但也不能使某一相位的红灯时间太长 , 造成驾 驶员心理上不能忍受 。对于过饱和交通流 , 只能按 信号最大周期控制 , 这时堵车不可避免 , 控制的目 的是尽快消除堵车 [ 2 ] 。
王史春 : 基于模糊控制算法实现信号灯智能化研究
协议 ·算法及仿真
Ln 和 Lnn这 3个参量决定的 。前信号周期与本周期 绿灯延长时间之和为本信号周期 。为减少车辆延 误和停车次数 , 当交通流较少时 , 使用较小的周 期以减少车辆的延误 ; 当交通流较大时 , 使用较 长的周期以减少车辆的停车次数 。交叉路口绿灯 时间的选择 , 在其他相位等候车辆不多的情况下 , 尽量延长本相位方向的绿灯时间 , 以保证本相位 方向的车辆畅通无阻地通过交叉口 。
算法 中 的 交 通 需 求 通 常 用 两 种 方 法 描 述 : ( 1 )用交叉口停止线前的排队长度即停止线前相隔 一定距离 (通常为 80~100 m )的两检测器之间的车 辆数来表示交通需求 ; (2)当占有率不低于某一基 准占有率时 , 用占有率表示交通需求 ; 当占有率 小于某一基准占有率且交通量不低于某一基准交 通量时 , 则用交通量表示交通需求 。检测器在指 定的时间 T (通常为 6 m in)内测得的计数值 (方波 数 )为交通量 ; 检测器在 T 内测得的方波宽度总和 与该时间值的比为占有率 。
步骤 1: 在状态 1 中 , 即东西方向红灯期间 , 检测出南北方向车辆数 L, 采用模糊控制算法 , 得 出初始绿灯时间 Gs , 令 Gs = T, 将 T通过 PLC的功 能指令传送给计时器并由 PLC开始执行 。
步骤 2: 在 △G = Gs 内根据检测器送来的车辆到
达和离开交叉口的数据 , 分别计算当前放行相位及下 一个放行相位的排队长度 , 设其分别为 Li 和 Li + 1;
为 (A1 , A2 , A3 ) , (B1 , B2 , B3 )其隶属函数赋值 表分别 , 如表 1所示 。
表 1 L i 赋值表
Li
模
糊
隶属 集
度
1
2
3
4
5
6
A1
1 015 0125 0 0 0
A2
0 0 015 1 015 0
A3
0 0 0 0 015 1
表 2 Gs 赋值表
Gs
模
糊
隶 集
关键词 非线性 ; 交通信号灯 ; 模糊控制 ; 智能化 中图分类号 TP273 + 14 文献标识码 A 文章编号 1007 - 7820 (2009) 11 - 028 - 05
S igna l In telligence Ba sed on the Fuzzy Con trol A lgor ithm
属
度
1
2
3
4
5
B1
1 014 0
0
0
B2
0 016 1 016 0
B3
0
0
0 015 1
根据 M amdani推理法 [ 4 ]可求出模糊关系 R 然
后用重心法进行模糊判决求出模糊控制查询表 ,
再由比例因子进行论域变换求出精确量输出查询
表 , 就可以对相位绿灯信号进行实时控制了 。
表 3 模糊控制查询表
作为是否转换的输出量 。
表 4 相位转移查询表
用时差转队换长度差 - 6
-4
-2
0
2
4
6
1 4154 4154 4109 4109 318 3105 2189
2 4137 4137 3196 3174 3174 2178 2153
3 318 318 3137 3122 3 2178 2102
If L i = 1
2
3
Then Gs = 1155 1165 219
4
5
6
3 3175 419
512 相位转换模糊控制 当初始绿灯用完时 , 由控制设备读取各检测
器的数据 。在以下两种情况 下 , 相 位发生 转换 : (1 ) Li = 0; ( 2 ) 初 始 绿 灯 已 达 到 最 大 绿 灯 时 间 (120 s) ; 但是 , 当前相位队长 Li 少于下一相位队 长 Li + 1 , 时间已用了很长 , 综合考虑应转到下一相
Keywords nonlinear; traffic lights; fuzzy control; intelligent
安装定时交通信号灯的初衷是为了保证不同 方向相交车流或行人能安全的通过交叉路口 。随 着交通需求的持续增加 , 人们认识到只要交通信 号灯存在 , 就会或多或少地影响交通网络的运行 效率 。因此信号灯必须以最优控制策略存在 , 以 减小道路网络中所有车辆行程的时间 , 必须要有 一个智能交通系统来实现城市道路的最大畅通 。
在信号交叉口控制的一个周期内 , 交叉口上某 一支或几支交通流所获得的通行权称为相位 , 划分 相位的目的是为了避免交叉口上各方向交通流之间 的冲突 。一般不能少于 P ×15 s ( P 为相位数 ) , 以 保证某一方向车辆及时安全通过路口 [ 3 ] ; 当交通需 求较大时 , 信号周期则应较长 , 但一般不能超过 120 s, 否则某一方向的红灯时间将超过 60 s, 驾驶 员心理上不能忍受 。当交通需求很小时 , 一般按最 小周期运行 ; 当交通需求很大时 , 只能按最大周期 控制 , 此时布辆堵塞现象已不可避免 。
图 1 系统总结构
收稿日期 : 2009207224 作者简介 : 王史春 ( 1973 - ) , 男 , 讲师 。研究方向 : 计算 机硬件及智能化 。
图 2 模糊控制过程
交通信号配时的绿灯延长时间 g是由该相位车 辆排队长度 (LC ) 、后继相邻两相位车辆排队长度
28 © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
步骤 3: 若 Li = 0, 或 Li < r且 △Li =Li + 1 - Li > e ( r≥0, e≥0)时 , 或累积绿灯时间 Gi = Gimax时 , 则将 绿灯转到下一相位 , 返回步骤 2, 否则继续执行。
步骤 4: 根据模糊控制规则库 , 按照 Li 及 △Li 值的大小来确定新的绿灯延长时间 △Gi , 若 Gi + △Gi ≥Gi , m ax, 则 △Gi = Gi , m ax - Gi , 否则 Gi + △Gi , 返回步骤 3。
W ang Shichun (Department of Computer Engineering, Taizhou Vocational & Technical College, Taizhou 317000, China)
Abstract The dynam ic control system is introduced. On the basis of the urban intersectionπs characteris2 tics of comp lexity, flexibility and strong randomness and through the app lication of fuzzy control methods, the control of the cycle length, phase difference and sp lit of the traffic lights and side2by2wire control system is an2 alyzed. A method for the determ ination of phase difference in the two2lane road is p roposed and fuzzy control and fuzzy neural network technology and control technology are used to control their imp lementation. Data ac2 quisition of the magnetic sensing coil, fuzzilization and fuzzy rules are app lied for fuzzy reasoning, fuzzy solu2 tion, and control output, and for the realization of intelligent control.