模糊控制算法单片机实现
采用单片机与模糊推理算法实现具有自校正能力的模糊控制器设计
采用单片机与模糊推理算法实现具有自校正能力的模糊控制器设计1 引言模糊控制系统是基于的控制系统模糊逻辑-分析的一个数学系统模式输入价值根据逻辑承担连续的价值在0和1之间的可变物,与古典对比或数字式逻辑,动手术在二者之一的离散值0和1 (真实和错误)。
模糊逻辑是用途广泛在机器控制。
期限启发有些怀疑,听起来等效与“未完成的逻辑”或“伪造逻辑”,但“模糊的”部分在方法不提到缺乏严峻,宁可到事实介入的逻辑可能应付模糊的概念-不可能被表达如“真实”或“错误”的概念,但是宁可和“部份地配齐”。
虽然基因算法并且神经网络可执行作为模糊逻辑在许多情况下(实际上,某些神经网络可以证明数学上是等值对某些模糊逻辑系统[1]),模糊逻辑有好处对问题的解答可以被熔铸用人工操作能了解的术语,因此他们的经验可以用于控制器的设计。
这使它更加容易机械化已经由人成功地执行的任务。
模糊控制(Fuzzy Control)是目前自动控制研究中活跃而富有成果的领域之一,模糊理论是当前能用来对信息进行软处理的最新技术,可以将人的定性思维和判断方法定量化为适合计算机处理的过程,使计算机能判断像“大概”、“轻”这样的模糊信息。
模糊控制是基于规则的智能控制方式,它不依赖于被控对象的精确数学模型,特别适合对具有多输入一多输出的强耦合性、参数的时变性、严重非线性与不确定性的复杂系统或过程的控制,且控制方法简单,鲁棒性好。
将模糊控制技术应用于一般的电子产品在国外已是很普遍的现象,单片机常用的控制器件,把二者结合起来,可使控制器的性能指标达到最优的目的。
本文就是通过利用单片机作为平台,围绕模糊控制规则,以模糊推理算法作为控制系统核心,开发出具有自校正能力的通用的模糊控制器。
最后以一个温度监控系统为实例介绍了系统的软硬件设计。
2 模糊控制系统的组成及原理2.1 模糊控制系统的基本组成与原理。
单片机模糊PID自整定控制算法的实现及仿真
山西电子技术2009年第3期应用实践 收稿日期:2009-04-09作者简介:张长林(19542),男,吉林四平人,工程师。
文章编号:167424578(2009)0320045202单片机模糊PID 自整定控制算法的实现及仿真张长林,张 镝(四平无线电监测站,吉林四平136000)摘 要:工业控制中常用的传统PID 算法,其参数整定不仅复杂、费时、费力,而且不易取得最优参数,使控制过程达不到理想状态。
针对此利用单片机的计算优势,融合最新的模糊控制理论,提出了一种新型的自动的PID 参数整定方法,通过软件模拟及实际检验,均达到了理想效果。
关键词:PID 控制器;参数整定;模糊算法中图分类号:TP273 文献标识码:A0 引言PID 控制器是在工业过程控制中最常见的一种控制调节器,它具有控制原理简单,容易实现,稳态无静差等优点。
因此,长期以来广泛应用于化工、冶金、机械、热工和轻工等工业过程控制系统中,并取得了良好的控制效果。
PID 控制器有几个重要的功能:提供反馈控制、通过积分作用可以消除稳态误差、通过微分作用预测将来。
当已知对象的精确数学模型时,只要正确设定参数,PID 调节器便可实现精确控制。
但在实际中,大多数工业过程都不同程度地存在非线性、参数时变性和模型不确定性,因而传统的PID 控制无法实现对这样过程的精确控制。
由于模糊控制不需要建立过程的精确模型而得到了越来越广泛的应用。
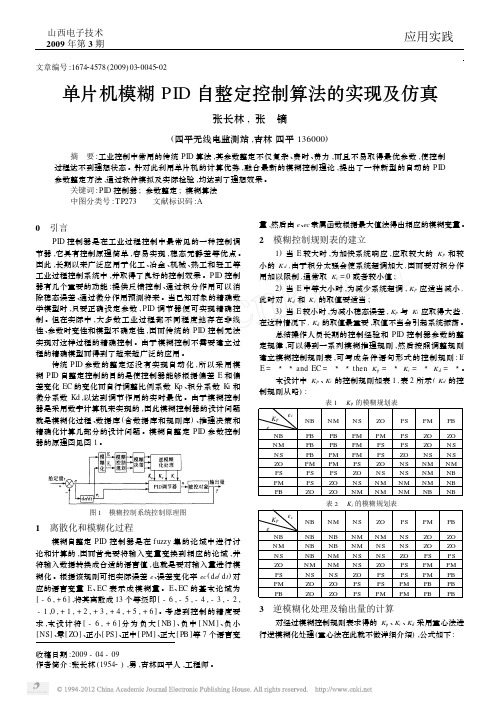
传统PID 参数的整定还没有实现自动化,所以采用模糊PID 自整定控制的目的是使控制器能够根据偏差E 和偏差变化EC 的变化而自行调整比例系数Kp 、积分系数Ki 和微分系数Kd ,以达到调节作用的实时最优。
由于模糊控制器是采用数字计算机来实现的,因此模糊控制器的设计问题就是模糊化过程、数据库(含数据库和规则库)、推理决策和精确化计算几部分的设计问题。
模糊自整定PID 参数控制器的原理图见图1。
图1 模糊控制系统控制原理图1 离散化和模糊化过程模糊自整定PID 控制器是在f uzzy 集的论域中进行讨论和计算的,因而首先要将输入变量变换到相应的论域,并将输入数据转换成合适的语言值,也就是要对输入量进行模糊化。
单片机 模糊控制pid 源代码
单片机模糊控制pid 源代码1. 单片机模糊控制PID的基本原理单片机模糊控制PID是一种基于模糊控制理论和PID控制理论相结合的控制方法。
其基本原理是通过模糊控制算法对系统进行模糊化处理,将输入和输出都转化为模糊量,然后再利用PID控制算法对模糊量进行处理,最终得到控制量,从而实现对系统的控制。
2. 单片机模糊控制PID的源代码实现单片机模糊控制PID的源代码实现需要先进行模糊化处理,然后再进行PID控制计算。
下面是一个基于C语言的单片机模糊控制PID的源代码示例:```#include <stdio.h>#include <stdlib.h>#include <math.h>//模糊化处理函数float fuzzy(float error){float fuzzy_error = 0;if(error < -10)fuzzy_error = -1;else if(error >= -10 && error < -5)fuzzy_error = (error + 10) / 5;else if(error >= -5 && error <= 5)fuzzy_error = 0;else if(error > 5 && error <= 10)fuzzy_error = (error - 5) / 5;else if(error > 10)fuzzy_error = 1;return fuzzy_error;}//PID控制函数float PID(float error, float last_error, float sum_error) {float kp = 0.5;float ki = 0.1;float kd = 0.2;float p = kp * error;float i = ki * sum_error;float d = kd * (error - last_error);return p + i + d;}int main(){float error = 0;float last_error = 0;float sum_error = 0;float control = 0;for(int i = 0; i < 100; i++){error = 10 - i;float fuzzy_error = fuzzy(error);sum_error += error;control = PID(fuzzy_error, last_error, sum_error);last_error = error;printf("control: %f\n", control);}return 0;}```3. 单片机模糊控制PID的应用场景单片机模糊控制PID可以应用于各种需要精确控制的场景,例如温度控制、机器人控制、电机控制等。
模糊控制技术单片机软件实现方法研究
信息技术IT WORLD一、光伏发电系统模糊控制方法光伏阵列是一个强非线性系统,太阳能电池的工作情况很难用精确的数学模型来描述,因此采用模糊控制的方法来进行太阳能电池最大功率点的跟踪是非常合适的,在实际操作中采用嵌入模糊控制器的方法来实现模糊控制。
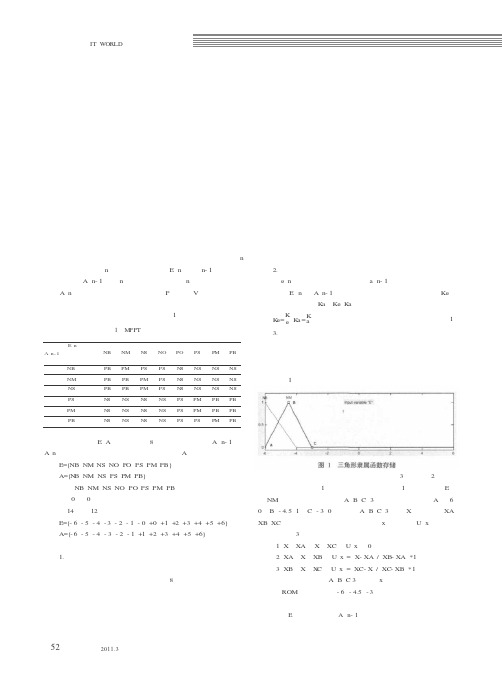
模糊控制器的第n 时刻的输入量为第n时刻的功率变化量E(n)和第n-1时刻的占空比步长值A(n-1),第n时刻的输出量为第n时刻的占空比步长值A(n)。
通过对光伏电池输出功率P与电压V之间的特性曲线分析,并且考虑到外界环境因素(温度、日照强度)对光伏阵列输出功率的影响,得到模糊控制规则如表1所示。
将语言变量E,A分别定义为8个模糊子集,其中A(n-1)和A(n)变量子集的论域相同,统一将其命名为A。
E={NB,NM,NS,NO,P O,PS,PM,PB};A={N B,NM,NS,PS,P M,PB}。
其中NB、NM、NS、NO、PO、PS、PM、PB分别表示负大、负中、负小、负0、正0、正小、正中、正大等模糊概念。
并将它们的论域规定为14个和12个等级,即:E={-6,-5,-4,-3,-2,-1,-0,+0,+1,+2,+3,+4,+5,+6};A={-6,-5,-4,-3,-2,-1,+1,+2,+3,+4,+5,+6}。
二、单片机系统实现模糊控制方法的探讨1.软件总体构思。
使用单片机系统实现模糊控制具有一定的难度,它是由控制算法的复杂性和单片机资源的有限性共同决定的。
需要指出的是单片机最擅长是8位无符号数运算,由于模糊控制系统比较复杂,要涉及小数和负数。
一种方法是通过区间变换,将数值扩大,从而避免单片机做负数和小数运算,从而获得较高的效率,但是变换过程比较麻烦,使得设计过程过于复杂,且与仿真系统难以对应。
随着存储器技术的发展和高级语言开发工具的支持,使我们有了足够的空间和效率,能够处理小数和负数运算,所以本系统没有进行论域变换而是直接处理小数和负数,使得设计更容易与仿真相对应,且连贯性较好。
基于单片机模糊PID控制算法实验设计

摘要自动控制理论实验主要任务是通过实验,使学生掌握自动控制的基本原理和方法,在熟练掌握各种校正方法设计原则的基础上,加强对控制理论的理解和认识,将理论与实践有机地结合起来,提高分析问题及解决问题的能力。
本设计是在原有实验箱的基础上,根据常规的PID控制,开发新型的模糊控制实验内容。
实验中的控制器为C8051F330单片机,通过上位机C语言开发环境,将代码写入单片机进行控制。
其算法采用将常规PID控制与模糊控制相结合的控制策略,运用模糊推理思想,根据不同的误差e及误差变化率ec对PID三个参数Kp,Ki及Kd进行实时优化,达到最优控制。
最终实现模糊PID 控制算法。
由于原有单片机内存的限制,在经过多次实验后,选取了两个模糊控制规则表对搭建的三阶被控对象进行算法验证,实验表明模糊控制和原有常规PID 控制比较,明显提高了系统的控制性能。
关键词:单片机,PID控制,模糊控制AbstractThe main task of automatic control theory’s experiments is to help students master basic principles and methods of automatic control theory by experiment. Based on mastering various correction methods, it helps to enhance understanding and awareness towards control theory, to integrate theory with practice , and to enhance the analysis of problems and problem-solving abilities.The design is based on the original test case, according to the conventional PID control , to develop new fuzzy control experiments. They are cored by the MCU C8051F330, by using C language development environment and writing codes into the MCU. The algorithm combines conventional PID control and fuzzy control together, and uses fuzzy reasoning to optimize three PID parameters Kp, Ki and Kd for real-time according to different error e and error change rate of ec, only to achieve optimal control. Eventually fuzzy PID control algorithm is realized.Since the original MCU’s memory is limited , after a number of experiments ,two fuzzy control rule bases have been selected to do algorithm validation towards third-order plant. Experiments show that fuzzy control has increased system control performance obviously compared with conventional PID control.Keywords: MCU; PID control; fuzzy control目录第一章绪论 (1)1.1研究背景和研究意义 (1)1.2本文结构 (1)1.3本章小结 (2)第二章单片机原理 (3)2.1 单片机系统设计的基础 (3)2.1.1 理论储备 (3)2.1.2 单片机系统设计的内容 (3)2.2单片机控制系统总体方案的设计 (3)2.2.1设计方法总述 (3)2.2.2直接数字控制 (4)2.2.3数字化PID控制 (4)2.3单片机系统硬件设计 (4)2.3.1 存储器拓展 (5)2.3.2 模拟量输入通道的拓展 (5)2.3.3 模拟量输出通道的拓展 (5)2.3.4 开关量的I/O接口设计 (5)2.3.5 操作面板 (6)2.3.6 系统速度匹配 (6)2.3.7 系统负载匹配 (6)2.4单片机系统的软件设计 (6)2.4.1 保证可靠性 (6)2.4.2 软硬件折中问题 (7)2.4.3 应用软件的特点 (7)2.4.4 软件开发步骤 (7)2.5单片机控制系统的调试 (7)2.5.1 硬件调试 (7)2.5.2 软件调试 (8)2.5.3 硬件、软件仿真调试 (9)第三章PID控制器 (10)3.1.1闭环控制算法 (11)3.1.2 PID是比例(P)、积分(I)、微分(D)控制算法 (11)3.1.3比例(P)、积分(I)、微分(D)控制算法各有作用 (11)3.1.4控制器的P,I,D项选择 (11)3.1.5 公式 (13)3.1.6 PID算法流程图 (14)第四章基于单片机模糊PID控制算法实现 (15)4.1 模糊控制例子 (15)4.2基本原理 (18)4.3模糊控制器算法研究 (19)4.3.1输入值的模糊化 (19)4.3.2模糊控制规则表的建立 (19)4.4模糊控制算法的实现 (20)4.4.1 实验模糊表 (20)4.4.2 输入输出的隶属度函数 (22)4.4.3 去模糊化 (25)4.4.4 单片机上实现控制算法 (27)4.4.5 模糊规则表的选择 (27)第五章总结 (30)致谢 (32)参考文献 (33)附录 (34)第一章绪论1.1研究背景和研究意义自动控制理论实验提供的实验箱中,我们可以搭接不同的被控对象,通过给被控对象输入阶跃信号,在上位机界面上观察其阶跃响应曲线,根据曲线波形,我们可以判定被控对象是否稳定以及各种控制器对被控对象的控制性能如何等。
一种单片机温度模糊控制系统的实现

-118-通过模糊控制理论的研究,结合目前应用广泛的单片机,本文设计实现了模糊电饭煲的控制系统。
1 温度模糊控制系统的设计为了实现模糊电饭煲的良好控制,我们采用了二维温度模糊控制系统,如图1所示。
整个系统的核心是模糊控制器,由单片机实现;温控装置由继电器驱动电路控制加热器的开关,达到控制温度的目的;由热敏电阻构成温度检测电路。
系统温度变化主要包括恒温和升温过程,其控制过程类似。
首先系统将温度检测装置得到的实时信号y与设定温度信号x进行比较,得到误差信号e以及误差变化率ec由模糊控制器进行处理,输出开关控制量u,控制加热过程。
图1温度模糊控制系统2 硬件方案电饭煲温度控制系统硬件电路方框图如图2所示。
图2温度控制系统框图单片机采用Motorola公司的MC68HC5P9。
单片机用软件完成模糊控制算法,输出信号控制功率驱动电路,实现温度控制。
键盘输入电路由按键K1、K2组成。
K1用于选择5种工作方式,K2用于启动和停止模糊控制系统。
功率驱动电路采用继电器驱动方式。
通过控制继电器采样周期内闭合的时间,实现一种单片机温度模糊控制系统的实现甄丽平 司绍伟石家庄经济学院信息工程系,河北 石家庄 050031武警石家庄指挥学院通信基础,河北 石家庄 050006对加热器的开关式控制。
LED显示电路由两部分组成,一部分是7段LED数码管,用于显示温度,每采样周期刷新一次显示值;另一部分是LED二极管,共6个,其中五个对应于K1键的五种工作方式,1个用于显示系统开关状态。
3 系统软件设计3.1 模糊控制器的实现在模糊电饭煲中,模糊温度控制有两种情况:一种是恒温控制,另一种是匀速升温控制。
其控制原理类似,其结构图如图3所示。
图3 模糊控制系统结构图模糊量化是将一个精确值化成一个或几个模糊值的单点的过程。
本系统中保温过程中,温差e、温差变化率ec为语言输入变量;升温过程中,温差变化率及温差变化率的变化率为语言输入变量。
基于单片机的水温恒温模糊控制系统设计
基于单片机的水温恒温模糊控制系统设计水温恒温在很多工业领域中都是非常重要的,比如在制造过程中需要严格控制水温以确保产品质量,或者在实验室中需要保持水温恒定以保证实验结果的准确性。
为了实现水温恒温,可以采用单片机控制系统进行模糊控制,以更好地调节水温并确保其恒定性。
一、系统设计1.系统组成该水温恒温模糊控制系统包括以下几个部分:1)传感器:用于实时监测水温,通常采用温度传感器来获取水温数据。
2)单片机:作为系统的核心控制部分,负责根据传感器采集的水温数据进行控制算法处理,并输出控制信号给执行器。
3)执行器:负责控制水温调节设备,比如加热器或制冷器,以使水温保持在设定的恒温值附近。
4)人机界面:用于设定水温的目标值、显示当前水温以及系统的工作状态等信息,通常采用液晶显示屏或LED灯来实现。
2.系统工作原理系统工作流程如下:1)单片机通过传感器获取实时水温数据,并与设定的恒温值进行比较。
2)根据实时水温和设定值之间的差异,单片机通过模糊控制算法计算出调节水温的控制信号。
3)控制信号送往执行器,执行器根据信号控制加热器或制冷器对水温进行调节。
4)单片机不断循环执行上述步骤,使水温保持在设定的恒温值附近。
二、模糊控制算法设计模糊控制算法是一种基于模糊逻辑进行推理和决策的控制方法,适用于非线性、不确定性系统的控制。
在水温恒温控制系统中,可以设计如下的模糊控制算法:1.模糊化:将实时水温和设定水温映射到模糊集合,通常包括“冷”、“适中”和“热”等。
2.模糊规则库:根据实际情况,设定一系列的模糊规则,描述实时水温和设定水温之间的关系。
3.模糊推理:通过模糊规则库,进行模糊推理,得到相应的控制信号。
4.解模糊化:将模糊推理的结果映射到实际的控制信号范围内,作为执行器的输入。
通过模糊控制算法设计,可以更加灵活地调节水温,适应各种复杂环境下的恒温控制需求。
三、系统实现在实际系统的实现中,首先需要选择合适的传感器,并设计好传感器的接口电路来获取水温数据。
基于单片机模糊PID控制算法实验设计
基于单片机模糊PID控制算法实验设计基于单片机的模糊PID控制算法是一种将模糊逻辑和PID控制相结合的控制方法。
模糊PID控制算法在许多工程和科学领域中具有广泛的应用,用于控制各种物理系统,例如机械系统、电子系统和化学系统等。
本文将介绍基于单片机的模糊PID控制算法的实验设计。
一、实验目的本实验旨在通过使用单片机实现模糊PID控制算法,控制一个虚拟物理系统的运动。
通过这个实验,我们可以了解模糊PID控制算法的原理和实现过程,并通过实验结果对其性能进行评估。
二、实验原理模糊PID控制算法是将模糊逻辑和传统的PID控制算法相结合而得到的一种控制方法。
PID控制算法是一种反馈控制方法,它通过测量和计算系统的误差,调整输出控制量,使得系统的运行状态能够接近期望状态。
模糊PID控制算法的原理是,在PID控制算法的基础上,使用模糊逻辑来处理模糊因素,使得控制系统能够对模糊因素有更好的适应性和鲁棒性。
模糊逻辑是对不确定性和模糊性进行建模和处理的一种方法,它能够通过模糊集合和模糊规则来描述和处理模糊因素。
在模糊PID控制算法中,首先使用一组模糊集合来表示误差和变化率的程度,然后建立一组模糊规则,通过模糊推理得到模糊控制量,最后将模糊控制量经过模糊解模糊化得到实际控制量。
这样,通过模糊逻辑的处理,能够使得控制系统对于模糊因素有更好的适应性和鲁棒性。
三、实验步骤1.设计一个虚拟物理系统,可以使用一个电机控制器和一个电机模拟器来模拟物理系统的运动。
2.根据虚拟物理系统的特性,确定控制系统的输入和输出变量,例如位置和速度。
3.设计一组模糊集合来表示位置和速度的程度,例如“远”、“近”、“大”、“小”等。
4.建立一组模糊规则,通过模糊推理得到模糊控制量。
5.设计一个PID控制算法,用于计算系统的误差和调整输出控制量。
6.将模糊控制量和PID控制量相结合,得到最终的实际控制量。
7.使用单片机编程语言,例如C语言,实现上述的模糊PID控制算法。
单片机模糊PID自整定控制算法的实现及仿真
单片机模糊PID自整定控制算法的实现及仿真一、引言PID控制(Proportional-Integral-Derivative Control)是一种常用的控制算法,用于调节系统的输出并使其接近设定值。
然而,传统的PID控制算法需要对调节参数进行手动调整,这在工程实际中往往十分困难。
为了解决这一问题,模糊PID自整定控制算法被提出。
模糊PID自整定控制算法可以根据系统的动态特性自动调整PID参数,提高系统的稳定性和鲁棒性。
本文将介绍单片机上模糊PID自整定控制算法的实现及仿真。
二、模糊PID自整定控制算法原理模糊PID自整定控制算法基于模糊逻辑理论,根据系统的输入和输出特征来自动调整PID的参数。
该算法过程主要包括模糊化、规则库的建立、推理、去模糊化等几个步骤。
以下是模糊PID自整定控制算法的具体步骤:1.模糊化:将输入和输出分别映射到隶属函数上,将连续的输入和输出转换为模糊的隶属度。
2.规则库的建立:利用专家经验建立一组模糊规则,规则库中包括输入的隶属函数和输出的隶属函数之间的关系。
3.推理:根据输入的隶属度和规则库的模糊规则,利用模糊推理得到输出的隶属度。
4.去模糊化:将模糊输出转换为确定性的输出,得到PID的参数。
三、单片机上模糊PID自整定控制算法的实现单片机上实现模糊PID自整定控制算法需要以下几个部分:传感器采集模块、模糊控制模块、PWM输出模块和显示模块。
1.传感器采集模块:使用传感器采集被控对象的输入和输出数据,如温度传感器、光敏传感器等。
2.模糊控制模块:将传感器采集的数据模糊化并输入到模糊控制器中,进行模糊推理,得到输出的隶属度。
3.PWM输出模块:根据输出的隶属度,计算PID的参数,然后将参数转换为PWM信号输出到被控对象。
4.显示模块:将被控对象的输入和输出数据、PID参数等信息通过显示模块显示出来,便于调试和监控。
四、单片机上模糊PID自整定控制算法的仿真为了验证模糊PID自整定控制算法的有效性,可以利用仿真软件进行仿真实验。
模糊控制算法单片机实现概要
湖南大学硕士学位论文模糊控制的单片机实现研究姓名:鲁远耀申请学位级别:硕士专业:电工理论与新技术指导教师:陈宗穆20020101社区:是指由居住在一定地域内的人们所组成的社会共同体。
一般分为两大类:一类是农村社区;一类是城市社区。
社会调查研究把社区作为对象,通常都是对社区作全面的区域性的调查研究。
由社区研究一般可以进一步拓展和上升到对整个社会的研究,以促进全社会的协调发展。
社会行为:即人类在社会中的行为,包括各种类型的社会活动、社会关系、社会制度等。
在对社会行为进行调查研究时,具体对象不是作为行为主体的个人,而是侧重描述各类行为本身的特征。
社会产品:指物化的人类行为的产物。
它们既可以作为独立的个体调查研究单位,也可以作为群体调查研究单位。
4.社会调查研究的理论基础是什么?答:社会调查研究的基本理论是指社会调查研究的指导思想和有关社会调查研究对象、目的、方法的一般概念、一般原理、基本原则和公式等。
这些基本理论贯穿于任何一个具体的社会调查研究全过程之中。
构建社会调查研究理论的基础有二,即哲学原理和具体科学原理。
哲学原理是从世界观和方法论的高度对社会调查研究予以指导,决定着社会调查研究的方向。
国外17世纪以后发展起来的具有现代意义的社会调查研究,曾先后出现了以人本主义、实证主义为理论基础的两种类型。
目前国外流行的社会调查研究主要即以实证主义为理论基础。
我国的社会调查研究在充分吸收人本主义、实证主义合理因素的基础上,强调以马克思主义辩证唯物论与历史唯物论作为哲学理论基础。
具体科学原理是指逻辑学、心理学、统计学、社会学等学科的有关科学原理。
社会调查研究常用的大量一般概念、一般原理、基本原则和公式等,都来自这些学科,它们的有机结合,形成了社会调查研究理论基础的一个重要组成部分,并突出地表现在方法和技术层面。
5.社会调查研究的基本方法涉及哪些方面?其核心内容是什么?答:所谓社会调查研究的基本方法主要是指具体的操作方法,涉及社会调查研究的各个方面:课题确定的方法;明确调查研究具体目的、对象、内容、类型的方法;调查研究方案设计和条件准备的方法;抽样的方法;各种搜集资料的方法,包括文献法、问卷法、访谈法、观察法、实验法;调查资料整理、分析的方法;撰写调查报告的方法,等等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
而采用基于单片机的模糊控制系统能够回避对复杂的被控对象——押出机 的建模问题,将熟练操作人员的操作经验转换化成全面而精炼的模糊控制规则,
形成模糊语言‘控制器,对被控对象进行自动化程度较高的自动控制。另外,在该 系统中采用基于数字通信的SCl串行总线控制代替基于PLC押出机控制系统中的 模拟量控制,能够提高系统生产的精度和可靠性,而且系统布线简洁,生产、安 装和维修方便。
hand,because the modeling ofthe controlled object is complex,there are quite a few
input and output variables,and the relationship between output variables is close, there is a outstanding problem that the degree of automation is not high in the control system based on PLC.On the other hand,the control system based on PLC adopts analog and switch quantity control,which leads to low precision and bad reliability of the system.
method of software fuzzy control lookup and the hardware circuit and software flowchart ofthe main control part ofthe fuzzy control system ofextruder.
我国在模糊控制理论方面的研究处于世界先进水平【l卜№】,先后出版了几十 本有关模糊理论方面的书籍,每年发表的研究论文也非常之多,相比之下工程技 术应用则相对较弱。近年来,计算机技术的发展给模糊技术的推广应用带来了美 好前景,模糊技术在我国逐步从理论殿堂走入工程应用,不断深入发展。
自动控制理论从诞生发展到现今,其理论丰富而成熟,在各行各业的控制应 用中起到了不可或缺的作用。但无论是采用经典控制理论还是采用现代控制理论
湖南大学 硕士学位论文 模糊控制的单片机实现研究 姓名:鲁远耀 申请学位级别:硕士 专业:电工理论与新技术 指导教师:陈宗穆
20020101
摘要
押出机是电线电缆工业中的核心设备,现行的电线电缆成套设备生产厂家广 泛采用基于PLC的自动控制系统。一方面,由于被控对象建模复杂,输入输出变 量多,并且输出变量之间关联性强等原因,基于PLC的控制系统普遍存在着自动 化程度低的突出问题。另一方面,这种系统采用传统的模拟量和开关量控制,致‘ 使系统的生产精度低,可靠性差。本文从模糊控制的基础理论出发,对模糊控制 器的设计方法、模糊控制的单片机实现方法进行了分析和对比研究,在此基础上 提出了基于MOTOROLA MC68HC0586单片机的押出机模糊控制系统。文章首先设 计出了4输入2输出的模糊控制器,其模糊控制规则能够比较有效地模仿熟练操 作人员的经验,合理解决输出的强关联性问题。然后利用模糊逻辑推理的方法, 结合大量的数学运算,离线计算出了简洁方便的模糊控制查询表。最后给出了模 糊控制查询的单片机实现方法及押出机模糊控制系统的核心控制部分的硬件电 路和软件流程。采用模糊控制的押出机自动控制系统,能够大大提高生产的自动 化程度,可实现~个操作工人轻松控制多条生产流水线,较大地提高劳动生产率。 另外,系统采用基于SCI串行通信总线的数字控制,代替原系统中的模拟量和丌 关量控制,能够有效提高系统的生产精度,改善系统的可靠性。本文的研究对我 国电线电缆工业成套设备的设计和生产具有一定的指导意义,如做进一步的研究 和调试,将具有较大的经济价值。
1.3本文的内容安排及主要研究工作
本文的第一章为绪论;第二章介绍模糊控制的基础理论知识,包括模糊数学 基础和模糊控制系统理论基础;第三章讲述模糊控制器的设计及算法的实现途 径:第四章论述模糊控制的单片机实现方法,并简要介绍了MOTOROLA MC68HC0586单片机的重要特性:第五章给出了基于单片机的押出机模糊控制 系统的控制器设计和模糊控制核心部分的软硬件实现方法。
Starting with the basic theory of fuzzy control,the paper analyses and
comparatively studies the design methods of fuzzy controller and the realization methods of fuzzy control by SCM,on the basis of which,a fuzzy control system of extruder based on MOTOROLA MC68HC0586 SCM is brought forward.A 4 input-2 output fuzzy controller has been designed in this paper,whose fuzzy control rules can imitate the experiehce of a skilled operator effectively.Then a concise and convenient fuzzy control lookup table is obtained off-line through fuzzy logic inference combined with complex mathematic computation.Finally the paper presents the realization
去设计一‘个自动控制系统,都需要事先建立被控对象的数学模型,要知道模型的 结{_iJ、层次、参数等等m4”。在此基础}二合理选择控制策略,进行控制器的设 汁。然而,大量事实告诉我们,在rl:多情况下,被控对象由于其过程复杂,机理 有不I¨j之处,缺乏必要的检测手段或者测试装-置不能进入被测区域等等各种原 因.致使无法建立被控过程的数学模型。这类过程的变量存在时变性。因此要建立这类过程的数学模 型非常蚓难,甚至是不可能。虽然我们已经有了对付非线性、时变参数系统的方 法,但是有些场合因为许多因素结合在一起,使问题解法复杂化以至缺乏使用价 值。因此,用经典控制理论和现代控制理论解决这类对象的控制往往难以奏效, 得不到满意的控制效果。
关键词:模糊控制;单片机;押出机;串行通信
Abstract
The extruder is the key equipment of the wire and cable industry.Nowadays wire and cable factories mostly adopt the automation control system based on PLC.On one
1.2本文的研究目的及意义
押出机是电线电缆工业中为电线电缆制作绝缘外皮的生产设备。制作电线电 缆绝缘外皮是整个电线电缆生产工艺流程中要求最高、难度最大的核心技术。我 国现行的众多电线电缆成套设备生产厂家,广泛采用基于PLC的自动控制系统 12¨”。这种系统虽然有设计方便快捷、开发周期短等独特优点,但却存在着自 动化程度低、生产精度不高和可靠性差的突出缺陷。一方面,系统在开机和运行 期阳j都必须配备专门的操作人员不问断地监视系统的运行状况,并且做频繁地操 作:系统无法脱离操作人员而实现程度更高的自动控制,它在本质上是一个缺陷 很多的开环控制系统。自动化程度低的主要原因是:系统本身是一个建模十分困 难、迟滞严重的多输入多输出,并且输出之间关联复杂的系统,很难实现比较理 想的PID闭环控制。另一方面,系统大多运用模拟量控制,模拟量参数易受生产 现场的恶劣环境的干扰,致使系统的生产精度低,可靠性差。
与此相反,对这类常规办法难以控制的对象,有经验的操作人员手动控制, 却往往可以收到较为满意的控制效果。模糊控制的基本思想[22-25]就是利用计算 机来实现人的控制经验。而人的控制经验~般由语言来表达的,这些语言表达的 控制规则又带有相当的模糊性。我们可以用模糊数学的方法来描述过程变量以及 它们之间的关系,又可以根据这种模糊关系及某时刻过程变量的检测值(需化成 模糊量)用模糊推理的办法得出此时刻的控制量。这即是模糊控制的基本思路。
The automation control system of extruder adopting fuzzy control Can greatly improve the automation degree of produce,through which one worker Call operate several product lines easily,the productivity Can be enhanced fairly.In addition,the analog quantity and switch quantity control of the former system is replaced by the digital quantity control,which can improve precision of production and reliability of the system.The study Can benefit the whole set’S design and produce of domestic wire and cable industry,and it will result in quite great economic value with further research and debug work.