恒压供水模糊自适应PID控制器的设计_仿真
恒压供水控制系统自适应模糊PID控制器设计及仿真(1)

恒压供水控制系统自适应模糊PID控制器设计及仿真作者:田红彬刘阳来源:《消费电子·理论版》2013年第03期摘要:恒压供水系统中控制系统复杂多变,控制参数测定不精确;本文提出了把PID控制与自适应模糊控制结合在一起的一种自适应模糊PID控制器应用恒压供水系统中,借助于PID参数的在线模糊自整定,实时修改PID参数,通过Matlab仿真实验发现该控制系统的响应速度加快,超调量减小,过渡过程时间大大缩短,振荡次数少,系统在运行过程中始终处于优化状态。
自适应模糊PID控制器在恒压供水系统中的应用既可以提高系统控制性能,又能最大限度地节约供水系统能源。
关键词:自适应模糊控制;PID控制;恒压供水;系统仿真中图分类号:TP273.4 文献标识码:A 文章编号:1674-7712 (2013) 06-0049-02一、引言随着人们生活品质的提高,人们对生活饮用水的要求也在不断地提高,恒压供水系统在多层及高层住宅用水和消防供水中得到了越来越广泛地应用。
现代的恒压供水系统中主要由水泵、变频器及调节环节构成,整个控制系统控制复杂多变,控制参数一般不能精确测定。
水泵作为一种典型的非线性负载,在运行的过程中其旋转的速度与给定的信号之间具有滞后、惯性较大的特点。
如果采用常规的PID控制,在系统运行过程中因不能可靠地调整PID参数而无法实现管道压力精确恒定控制,而且响应速度比较慢。
而模糊控制对数学模型的依赖性较弱,不需要建立过程的精确模型,它可以把人们的经验转化为控制策略,对时变的、非线性的、滞后的、高阶的大惯性的被控制对象,能获得良好的动态特性。
基于以上原因,本文提出了模糊控制系统与传统的PID控制相结合,设计了一种自适应模糊PID控制器,借助于PID参数的在线模糊自整定,实时修改PID参数,确保系统在运过程中始终处于优化状态,既提高了系统控制性能,又能最大限度地节约供水系统能源。
二、自适应模糊PID的概念根据PID控制器的Kp、Ki、Kd的三个参数与偏差e和偏差的变化率ec之间的模糊关系,在运行时不断检测e及ec,通过事先确定的关系,利用模糊推理的方法,在线自动修改控制器PID参数。
恒压供水模糊自适应PID控制器的设计、仿真

恒压供水模糊自适应PID控制器的设计、仿真作者:黄祥源来源:《计算技术与自动化》2011年第03期摘要:对遗传算法和传统PID控制作简要的介绍,针对工程整定方法整定的初始值超调量较大,调节时间较长的问题,利用遗传算法对其初值进行整定。
利用遗传算法整定出的一组性能较优良的PID初值,结合模糊控制的思想,利用专家系统直接建立模糊规则,进行模糊自适应PID控制器的初步设计,并对恒压供水系统进行仿真,仿真结果满足设计要求。
关键词:模糊控制;PID控制器;恒压供水;Matlab中图分类号: TP312 文献标识码:A1 引言目前恒压供水技术在农业、工业和民用供水系统中已广泛使用,由于系统的负荷变化的不确定性,采用传统的PID算法实现压力控制的动态特性指标很难收到理想的效果。
在大多数恒压供水系统中采用传统意义的PID调节器,系统的动态特性指标总是不稳定,通过实际应用中的对比发现应用模糊控制理论形成的控制方案在恒压供水系统中有较好的效果。
本方案在常规PID控制器基础上引入模糊控制器,实现被控制对象参数变化在一定范围内模糊PID控制,使恒压供水系统动态静态性能指标保持最优。
2 模糊控制的结构与原理模糊控制系统是以模糊集理论,模糊语言变量和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统,它从行为上模仿人的模糊推理和决策过程,它的组成核心是具有智能性的模糊控制器[1]。
模糊逻辑控制的实质是利用模糊逻辑建立一种“自由模型”的非线性控制算法,在那些采用传统定量技术分析过程过于复杂的过程,或者提供的信息是定性的、非精确的、非确定的系统中,其控制效果是相当明显的。
模糊控制的基本原理框图如图1所示[3]。
它的核心部分为模糊控制器,如图1中点划线框中所示,模糊控制器的控制规律由计算机的程序实现。
实现一步模糊控制算法的过程描述如下:微机经中断采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E,一般选误差信号作为模糊控制器的一个输入量。
恒压供水控制系统自适应模糊PID控制器设计及仿真

关键词 :自 适应模糊控 制; P I D控制; 恒压供水; 系统仿真
Ke y wo r d s :a d a p t i v e f u z z y c o n t r o l ; P I D c o n ro t l ; c o n s t a n t p r e s s u r e wa t e r s u p p l y ; s y s t e m s i mu l a i t o n
Va l u e E n g i n e e r i n g
・2 1・
恒压供水 控制 系统 自适应模糊 P I D控制器 设计及仿 真
Th e De s i g n a n d S i mu l a t i o n o f Co n s t a n t P r e s s u r e Wa t e r S u p p l y Co n t r o l S y s t e m Ad a p t i v e F u z z y P I D Co n t r o l l e r
徐瑞 丽 X U R u i — i f ; 尹飞凰 Y I N F e i - h u a n g
( 河 南 职 业 技 术 学 院 电气 工 程 系 , 郑州 4 5 0 0 4 6)
( D e p a r t me n t o f E l e c t r i c a l E n g i n e e r i n g , H e n a n P o l y t e c h n i c , Z h e n g z h o u 4 5 0 46 0 , C h i n a )
mo d i ic f a t i o n ,t h r o u g h Ma t l a b s i mu l a t i o n e x p e i r me n t s y s t e m i n i n t h e r u n n i n g p r o c e s s i s a l wa y s i n o p t i ma l c o n d i t i o n . Ad a p t i v e f u z z y P I D c o n t r o l l e r u s e d i n c o n s t nt a - p r e s s u r e w a t e r s u p p l y s y s t e m c a l l n o t o n l y i mp ov r e he tБайду номын сангаас p e fo r r ma n c e o f t h e c o n t r o l s y s t e m,a nd t h e ma x i mu m e n e r g y s a v i n g w a t e r s u p p l y s y s t e m.
自适应模糊PID控制器的设计与仿真

自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。
模糊PID控制器的设计与仿真——设计步骤(修改)
模糊PID控制器的设计与仿真设计模糊PID控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。
模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。
本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔK P,ΔK D,ΔK I,在设计模糊PID 的过程中,需要将这些精确量转换成为模糊论域上的模糊值。
本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6]。
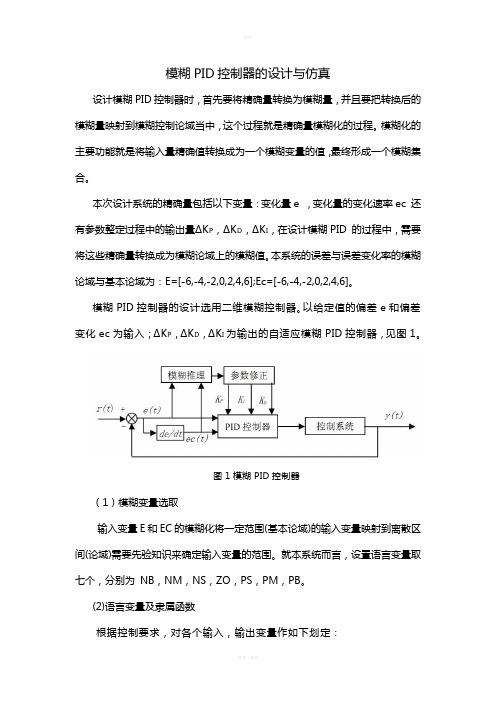
模糊PID控制器的设计选用二维模糊控制器。
以给定值的偏差e和偏差变化ec为输入;ΔK P,ΔK D,ΔK I为输出的自适应模糊PID控制器,见图1。
图1模糊PID控制器(1)模糊变量选取输入变量E和EC的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。
就本系统而言,设置语言变量取七个,分别为NB,NM,NS,ZO,PS,PM,PB。
(2)语言变量及隶属函数根据控制要求,对各个输入,输出变量作如下划定:e ,ec 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}ΔK P ,ΔK D ,ΔK I 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}应用模糊合成推理PID 参数的整定算法。
第k 个采样时间的整定为).()(,)()(,)()(000k K K k K k K K k K k K K k K D D D I I I P P P ∆+=∆+=∆+=式中000,,D I P K K K 为经典PID 控制器的初始参数。
设置输入变量隶属度函数如图2所示,输出变量隶属度函数如图3所示。
图2 输入变量隶属度函图3 输出变量隶属度函(3)编辑模糊规则库根据以上各输出参数的模糊规则表,可以归纳出49条控制逻辑规则,具体的控制规则如下所示:1.If (e is NB) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)2.If (e is NB) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)3.If (e is NB) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)4.If (e is NB) and (ec is ZO) then (kp is NM)(ki is PM)(kd is PB)(1)5.If (e is NB) and (ec is PS) then (kp is NS)(ki is PS)(kd is PB)(1)6.If (e is NB) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PM)(1)7.If (e is NB) and (ec is PB) then (kp is ZO)(ki is ZO)(kd is NS)(1)8.If (e is NM) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)9.If (e is NM) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)11.I f (e is NM) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)12.I f (e is NM) and (ec is PS) then (kp is NS)(ki is PS)(kd is PM)(1)13.I f (e is NM) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PS)(1)14.I f (e is NM) and (ec is PB) then (kp is PS)(ki is ZO)(kd is ZO)(1)15.I f (e is NS) and (ec is NB) then (kp is NM)(ki is PB)(kd is ZO)(1)16.I f (e is NS) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)17.I f (e is NS) and (ec is NS) then (kp is NM)(ki is PS)(kd is PM)(1)18.I f (e is NS) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)19.I f (e is NS) and (ec is PS) then (kp is ZO)(ki is ZO)(kd is PS)(1)20.I f (e is NS) and (ec is PM) then (kp is PS)(ki is NS)(kd is PS)(1)21.I f (e is NS) and (ec is PB) then (kp is PS)(ki is NS)(kd is ZO)(1)22.I f (e is ZO) and (ec is NB) then (kp is NM)(ki is PM)(kd is ZO)(1)23.I f (e is ZO) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)24.I f (e is ZO) and (ec is NS) then (kp is NS)(ki is PS)(kd is PS)(1)25.I f (e is ZO) and (ec is ZO) then (kp is ZO)(ki is ZO)(kd is PS)(1)26.I f (e is ZO) and (ec is PS) then (kp is PS)(ki is NS)(kd is PS)(1)27.I f (e is ZO) and (ec is PM) then (kp is PM)(ki is NM)(kd is PS)(1)28.I f (e is ZO) and (ec is PB) then (kp is PM)(ki is NM)(kd is ZO)(1)29.I f (e is PS) and (ec is NB) then (kp is NS)(ki is PM)(kd is ZO)(1)30.I f (e is PS) and (ec is NM) then (kp is NS)(ki is PS)(kd is ZO)(1)31.I f (e is PS) and (ec is NS) then (kp is ZO)(ki is ZO)(kd is ZO)(1)32.I f (e is PS) and (ec is ZO) then (kp is PS)(ki is NS)(kd is ZO)(1)33.I f (e is PS) and (ec is PS) then (kp is PS)(ki is NS)(kd is ZO)(1)34.I f (e is PS) and (ec is PM) then (kp is PM)(ki is NM)(kd is ZO)(1)36.I f (e is PM) and (ec is NB) then (kp is NS)(ki is ZO)(kd is NB)(1)37.I f (e is PM) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is PS)(1)38.I f (e is PM) and (ec is NS) then (kp is PS)(ki is NS)(kd is NS)(1)39.I f (e is PM) and (ec is ZO) then (kp is PM)(ki is NS)(kd is NS)(1)40.I f (e is PM) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)41.I f (e is PM) and (ec is PM) then (kp is PM)(ki is NB)(kd is NS)(1)42.I f (e is PM) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1)43.I f (e is PB) and (ec is NB) then (kp is ZO)(ki is ZO)(kd is NB)(1)44.I f (e is PB) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is NM)(1)45.I f (e is PB) and (ec is NS) then (kp is PM)(ki is NS)(kd is NM)(1)46.I f (e is PB) and (ec is ZO) then (kp is PM)(ki is NM)(kd is NM)(1)47.I f (e is PB) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)48.I f (e is PB) and (ec is PM) then (kp is PB)(ki is NB)(kd is NS)(1)49.I f (e is PB) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1) 把这49条控制逻辑规则,键入到模糊规则库中,如图4。
自适应模糊PID控制器的设计和仿真

·98·(总第33—1008)火力与指挥控制2008年第7期隶属函数图形如图4所示。
打开RulerEditor窗口,以If…then的形式输入模糊控制规则,与方式(Andmethod)为min;或方式(0rmethod)为max;推理(Implication)为min;合成(Aggregation)为max;去模糊(Defuzzification)为重心平均法(centroid)。
这样就建立了一个FIS文件,取名为Fuzzypid.fis。
在MATLAB的M文件编辑器里建立一个名为fpid.m的文件,其内容为:martrix=readfis(‘Fuzzypid.fis’);这样就完成了模糊工具箱与SIMULINK的链接,为整个系统的建立打下基础。
打开曲面观测窗口(Surface),可以查看△KP、△K,和△KD分别在论域上的输出曲面如图5所示。
裹l△KP、△足,、△KD的控制规则图4E、EC、K,、K。
和Kd的隶属函数图S△KP、△KJ和△KD分别在论域上的输出曲面计系统的仿真框图,如图9所示。
其中,模糊控制器及其封装仿真模型如图6所示,ke、kec为模糊化因子,K1、K2、K3为解模糊因子。
PID控制器及其封装仿真模型如图7所示,kpo、kio、kdo为其初始值。
把模糊控制器和PID控制器封装在一起,组成Fuzzy—PID控制器,如图8所示。
图6模糊控制器及其封装图7PID控制器及其封装臼b口圈8模糊自适应PID控制器及其封装2模糊PID控制系统应用及其仿真2.2仿真昙羹模糊Ⅳ。
控制系统仿真框图2.1建立系统结构仿真框图由于许多工业过程的对象特性可用二阶惯性环在MATLAB的Simulink环境下根据图1设节加纯滞后来表示,所以本文选择的仿真对象数学殷云华,等:自适应模糊PlD控制器的设计和仿真(总第33—1009)·99·模型传递函数G(s)一讨孓干吾南,丁,=2,[73T。
恒压供水控制系统自适应模糊PID控制器设计及仿真

中图分 类号 : T P 2 7 3 . 4 文献标识码 :A 文章编号 :1 6 7 4 - 7 7 1 2( 2 0 1 3 )0 6 - 0 0 4 9 - 0 2
引 言 随着人们生活品质 的提高,人们对生活饮用水的要求也在 不断地提 高,恒压供水系统在多层及高层住宅用水和消防供水 中得到了越来越广泛地应用 。现代的恒压供水系统 中主要由水 泵 、变频器及调节环节构成 ,整个控制系统控制 复杂多变,控 制参数一般不能精确测定。水泵作为一种典型的非线性负载, 在运行 的过程中其旋转的速度与给定的信号之间具有滞后 、惯 图 1 控制系统结构框图 性较大 的特点。 参数 K 、T 、 的确定采用离线开环阶跃响应法 ,具体作法 如果采用常规 的 P I D控制,在系统运行过程中因不能可靠 是:在开环系统下 ,由控制器输 出一个适 当幅度的阶跃信号 , 地调整 P I D参数而无法实现管道压力精确恒定控制,而且响应 使水泵转速提到一定 的幅度,然后记录水压 的变化过程 ,在根 速度 比较慢。而模糊控制对数学模型 的依赖性较弱 ,不需要建 据输入输 出数据进行辨识。本系统的辨识结果为 K =O . 9 5 ,T = 立过程的精确模型 ,它可以把人们的经验转化为控制策略 ,对 9 . 8 , :2 . 5 5 s ,由此可得供水控制系统 的近似模型为 时变 的、非线性的、滞后的、高阶的大惯性的被控制对象 ,能 获得 良好的动态特性。 a( s 、 : e _ 2 l 5 5 基于 以上原因,本文提 出了模糊控制系统与传统的 P I D控 9. 8 +1 制相结合 ,设计了一种 自适应模糊 P I D 控制器 ,借助于 P I D参 ( 二 )参数 自整定原则 数的在线模糊 自整 定,实时修改 P I D参数 ,确保系统在运过程 P I D参数模糊 自整定是找出 P I D的三个参数与偏差 e和偏 中始终处于优化状态,既提高了系统控制性能,又能最大限度 差的变化 e c 之间的模糊关系,在运行中通过不断检测 e及 e c , 地节约供水系统能源。 根据模 糊控制规则来对三个参数进行在线修改,以满足不同 e 二、 自适应模糊 P l D的概念 及e c时对控制参数的不 同要求, 而使被控制对象具有 良好的动 根据 P I D 控制器的 K p 、 K i 、 K d的三个参数与偏差 e 和偏差 静态性能,模糊 P I D控制系统如 图 2所示 。 的变化率 e c之 间的模糊关系 ,在运行时不断检测 e及 e c ,通 过事先确定 的关系,利用模糊推理 的方法,在线 自动修 改控制 器P I D参数。因为参数可 自动调整 ,所以 自适应模糊 P I D控制 能解决系统 的非线性 问题 。 ‘ 常规 P I D控制只能利用一组固定参数进行控制 ,这些参数 不 能兼顾动态性 能和静态性能之间、设定值和抑制扰动之间的 图 2 模糊控制器控制原理图 矛盾 。因此,将模糊推理 引入控制系统,在 P I D初值基础上通 过增加修正参数进行整定 ,可 以改善系统动态性能。 模糊控制器以偏差和偏差变化率作为输入 , 修正参数 △K p , 三、 自适应模糊 P I D 控制 器设计 △K i ,△K d为输 出,贝 0 P I D ( 一)恒压供水系统数学模型的建立 在二级泵房 中,水泵 由初始状态 向管网供水 的变频调速恒 压系统,一般可分为零压过程和压力上升过程 。 而零压过程中, 水泵把水从清水池送 到管网中, 压力基本上可以认为保持 为零 , 是一个纯滞后过程 ;压力上升过程,水泵把水充满整个管路, 压力逐渐增加直至达到稳定,可 以认为是一个。因此 ,水泵管 道系统 的数学模型可 以等 效为带有纯滞 后环 节的一阶惯性 环 节,系统 中其它的控制和检测环节 ,如变频调节、继电器控制 转换、压力检测等的时间常数和滞后时间,与供水系统水压上 图3 P I D参数模糊调整图 升或下降的时间常数 和滞后时间相 比,可以忽略不计。由此可 控制器输 出的参数 K p ,K i ,K d 可按公式 卜3计算,式中 K 得供水系统的近似模型 : P ,K ’ i ,K ’ d为 预整 定值 。 K p =K ’ p + AK p ( 公式 1 ). G = e … 1 ]
恒压供水模糊自适应PID控制器的设计、仿真

Ab t a t Th s p p r g v r fi t o u t n f r t e t a i o a P D o t o n e e i ag rt ms F rt e l r e 一 sr c : i a e a e a b i n r d c i o h r d t n l I c n r la d g n t l o i e o i c h . o h a g r0
1 引 言
目前 恒压供 水技 术在农 业 、 业和 民用供水 系 工 统 中 已广 泛使 用 , 于 系统 的 负 荷 变化 的不 确定 由 性, 采用 传 统 的 P D算 法实 现 压 力 控制 的 动 态 特 I
性指 标很难 收 到 理想 的效 果 。在 大多 数恒 压 供 水 系统 中采 用 传 统 意 义 的 P D 调节 器 , I 系统 的 动 态 特性 指标 总是不 稳定 , 通过 实际应 用 中的对 比发 现
第3 0卷第 3期
2011年 9月
计
算
技
术
与 自 动
化
Vo . 0. . 1 3 No 3 S p e .2 0 1 1
Co p t g Te h oo y a d Au o to m u i c n l g n t ma i n n
文 章 编 号 :O 3 6 9 ( 0 1O —0 5 -0 1 O ~ 19 2 1 )3 0 6 6
恒 压 供 水 模 糊 自 适 应 PI 控 制 器 的 设 计 、 真 D 仿
黄 祥 源
( 常州 轻 工 职 业 技术 学 院 , 苏 常 州 江 2 36 ) 1 14
摘
要 : 遗 传 算 法 和 传 统 PD 控 制 作 简要 的介 绍 , 对 工 程 整 定 方 法整 定 的初 始 值 超 调 量 较 大 , 节 对 I 针 调
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第30卷第3期2 0 1 1年9月计 算 技 术 与 自 动 化ComutinTechnoloandAutomationVol.30,No.3 Sep.2 0 1 1收稿日期:2011-05-17作者简介:黄祥源(1974—),男,江苏盐城人,硕士研究生,研究方向:自动控制(E-mail:hxy@czili.edu.cn)。
文章编号:1003-6199(2011)03-0056-06恒压供水模糊自适应PID控制器的设计、仿真黄祥源(常州轻工职业技术学院,江苏常州 213164) 摘 要:对遗传算法和传统PID控制作简要的介绍,针对工程整定方法整定的初始值超调量较大,调节时间较长的问题,利用遗传算法对其初值进行整定。
利用遗传算法整定出的一组性能较优良的PID初值,结合模糊控制的思想,利用专家系统直接建立模糊规则,进行模糊自适应PID控制器的初步设计,并对恒压供水系统进行仿真,仿真结果满足设计要求。
关键词:模糊控制;PID控制器;恒压供水;Matlab中图分类号:TP312 文献标识码:ADesign to Adaptive Fuzzy PID Controller for Constant-pressure Water SupplyHUANG Xiang-yuan(Changzhou Institute of Light Industry Technology,changzhou 213164,china) Abstract:This paper gave a brief introduction for the traditional PID control and genetic algorithms.For the larger o-vershoot of tuning initial solution and longer adjustment time from engineering neaten method,the initial values were set byuse of genetic algorithm.The paper set up the fuzzy rules directly and made the preliminary design to the adaptive fuzzy PIDcontroller,and simulated the constant-pressure water supply system according to fuzzy control theory,by a set of good ini-tial PID values from genetic algorithms,and expert system.Key words:fuzzy control;PID controller;Constant-pressure water supply;matlab1 引 言目前恒压供水技术在农业、工业和民用供水系统中已广泛使用,由于系统的负荷变化的不确定性,采用传统的PID算法实现压力控制的动态特性指标很难收到理想的效果。
在大多数恒压供水系统中采用传统意义的PID调节器,系统的动态特性指标总是不稳定,通过实际应用中的对比发现应用模糊控制理论形成的控制方案在恒压供水系统中有较好的效果。
本方案在常规PID控制器基础上引入模糊控制器,实现被控制对象参数变化在一定范围内模糊PID控制,使恒压供水系统动态静态性能指标保持最优。
2 模糊控制的结构与原理模糊控制系统是以模糊集理论,模糊语言变量和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统,它从行为上模仿人的模糊推理和决策过程,它的组成核心是具有智能性的模糊控制器[1]。
模糊逻辑控制的实质是利用模糊逻辑建立一种“自由模型”的非线性控制算法,在那些采用传统定量技术分析过程过于复杂的过程,或者提供的信息是定性的、非精确的、非确定的系统中,其控制效果是相当明显的。
模糊控制的基本原理框图如图1所示[3]。
它的核心部分为模糊控制器,如图1中点划线框中所示,模糊控制器的控制规律由计算机的程序实现。
第30卷第3期黄祥源:恒压供水模糊自适应PID控制器的设计、仿真实现一步模糊控制算法的过程描述如下:微机经中断采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E,一般选误差信号作为模糊控制器的一个输入量。
把误差信号的精确量进行模糊化变成模糊量。
误差E的模糊量可用相应的模糊语言表示,得到模糊语言集合的一个子集e(e是一个模糊矢量),再由e和模糊关系R根据推理的合成规则进行模糊决策,得到模糊控制量u。
模糊控制器通常由模糊化接口、推理机、知识库和解模糊等四部分组成。
图1 模糊控制基本原理由图1可知,模糊控制系统与通常的计算机数字控制系统的主要差别是采用了模糊控制器。
模糊控制器是模糊可控制的核心,一个模糊控制系统性能的优劣,主要取决于模糊控制器的结构、所采用的模糊规则、合成推理算法及模糊决策的方法等因素。
3 模糊自适应PID控制器的结构与原理在工业生产过程中,许多被控对象受负载变化或干扰因素影响,其对象特性参数或结构易发生改变。
自适应控制运用现代控制理论在线辨识对象特性参数,实时改变其控制策略,使控制系统品质指标保持在最佳范围内,但其控制效果的好坏取决于辨识模型的精确度,这对于复杂系统是非常困难的。
因此,在工业生产过程中,大量采用的仍然是PID算法。
PID参数的整定方法很多,但大多数都以对象特性为基础。
随着计算机技术的发展,人们利用人工智能的方法将操作人员的调整经验作为知识存入计算机中,根据现场实际情况,计算机能自动调整PID参数,这样就出现了专家PID控制器。
该控制器把古典的PID控制与先进的专家系统相结合,实现系统的最佳控制。
这种控制方法必须精确地确定对象模型,将操作人员(专家)长期实践积累的经验知识用控制规则模型化,并运用推理对PID参数实现最佳调整。
由于操作者经验不易精确描述,控制过程中各种信号量及评价指标不易定量表示,专家PID方法受到局限。
模糊理论是解决这一问题的有效途径,所以人们运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则及有关信息(如评价指标、初始PID参数等)作为知识存人计算机知识库中,然后计算机根据控制系统的实际响应情况(即专家系统的输入条件),运用模糊推理,即可自动实现对PID参数的最佳调整,这就是模糊自适应PID控制。
模糊自适应PD控制器目前有多种结构形式,但其工作原理基本一致。
参数自整定模糊PID控制系统如图2所示。
模糊自调整PID控制在PID算法的基础上,通过计算当前系统偏差和偏差变化,用模糊推理的方法对PID参数kp,ki,kd进行在线自整定,查询模糊矩阵表对PID控制器参数进行调整。
模糊规则根据人们实际经验而获得。
模糊自调整PID控制基本设计思想是将模糊决策理论与PID控制结合起来,发挥两者的优点,其响应特性优于数字PID控制[4,5],对于非线性和时变性的被控对象,可得到较满意的控制效果。
图2 模糊自适应PID控制系统结构如图2所示,模糊自调整PID控制器通常由两部分构成:模糊控制器和控制器。
模糊控制器以偏差e和偏差变化ec作为输入,运用模糊推理得到PID制器三个预整定参数即kp0,ki0,kd0的修正参数,从而得到PID控制器的参数,如式所示:kp=kp0+k′pki=ki0+k′ikd=kd0+k′烅烄烆d通过对PID控制器的三个参数进行在线修改k′p,k′i,k′d,满足不同偏差e和偏差ec变化对控制参数的不同要求,从而使被控对象具有良好的动、静态特性。
75计算技术与自动化2011年9月4 恒压供水系统模糊自适应PID控制器的设计 模糊控制系统结构如图3。
本系统中以给定以水压给定值SP和实际水压测量值的偏差e(e=SP-偏差)和偏差变化率ec(ec=de/dt),通过量化因子模糊化后分别得到模糊量E和EC,并分别用模糊语言加以描述。
如果用PLC进行在线模糊推理,将花费大量的运算时间,从而影响系统工作。
所以这里采用查询模糊控制表的方法实现恒水压控制。
图3 模糊控制系统结构图1)确定模糊控制器的输入输出量。
基于对系统的上述分析,由于受控对象具有非线性与时滞性,为了得到良好的控制性能,我们不观测系统的压力误差e,模糊控制器采用两输入、三输出的控制器,将误差e和误差的变化率ec作为输入,将PID控制器的三个参数kP、ki、kd作为输出。
2)确定语言变量的论域元素。
需要确定的语言变量有五个,即误差e、误差变化ec和输出量kP、ki、kd。
本设计中,给定的压力值为yd=0.6 MPa,系统实际的压力值设为y,则误差e=yd-y,取其语言变量为E,论域E={-3,-2,-1,0,1,2,3},论域上的模糊子集是Ai(i=1,2,……,7),相应语言值为:{负大(NB),负中(NM),负小(NS),零(Z0),正小(PS),正中(PM),正大(PB)}。
分别表示当力值相对与设定值为:“极大”、“很大”、“偏大”、“正好”、“偏小”、“很小”、“极小”。
ec=e2-e1=(yd-y2)-(yd-y1)=y1-y2,取其语言变量为EC,论域EC=-3,-2,-1,0,1,2,3},论域上模糊子集是Bj(j=1,2,…,7),相应语言值为:{负大(NB)、负中(NM)、负小(NS)、零(Z0)、正小(PS)、正中(PM)、(PB)}。
分别表示当前水压的变化y2-y1为:“快速增大”、“较快增大”、“增大”、“不变”、“减小”、“较快减小”、“快速减小”。
系统输出量为:kP、ki、kd,分别取其语言变量为:Kp、Ki、Kd,论域为Kp={-3,-2,-1,0,1,2,3},Ki={-3,-2,-1,0,1,2,3},Kd={-2,-1,0,1,2,3},相应的语言值分别为:{负小(NB)、负中(NM)、负小(NS)、零(Z0)、正小(PS)、正中(PM)、正大(PB)}。
3)确定语言值的隶属度函数。
本设计中选用三角型和正态分布型隶属函数相结合的形式。
>>a=newfis('tipper');>>a=addvar(a,'input','e',[-3,3]);>>a=addmf(a,'imput',1,'NB','zmf',[-3,-1]);>>a=addmf(a,'imput',1,'NM','trimf',[-3,-2,0]);>>a=addmf(a,'imput',1,'NS','trimf',[-3,-1,1]);>>a=addmf(a,'imput',1,'NO','trimf',[-2,0,2]);>>a=addmf(a,'imput',1,'PS','trimf',[-1,1,3]);>>a=addmf(a,'imput',1,'PM','trimf',[0,2,3]);>>a=addmf(a,'imput',1,'PB','smf',[1,3]);>>plotmf(a,'imput',1)得到的隶属度函数分别见图4-8所示:图4 输入e的隶属度函数4)模糊控制规则的设计。