定时器输入捕捉含义
定时器输入捕获原理

定时器输入捕获原理定时器输入捕获原理是指通过定时器模块来捕获外部信号的时间信息,从而实现对外部信号的精确测量和处理。
在实际应用中,定时器输入捕获技术被广泛应用于测量脉冲信号的频率、周期、占空比等参数,以及实现高精度的时间同步和计时功能。
定时器输入捕获的原理是基于定时器模块的计数器和捕获寄存器实现的。
定时器模块通常由一个计数器和若干个捕获寄存器组成,计数器用于计数定时器时钟的脉冲数,而捕获寄存器则用于存储外部信号的时间信息。
当外部信号到达定时器输入端口时,定时器模块会自动将当前计数器的值存储到捕获寄存器中,从而记录下外部信号的时间戳。
定时器输入捕获的实现过程通常包括以下几个步骤:1. 配置定时器模块:首先需要对定时器模块进行配置,包括选择计数器的时钟源、设置计数器的计数范围、选择捕获寄存器等。
2. 配置外部信号输入:将外部信号连接到定时器的输入端口,并设置输入模式和触发条件,例如上升沿触发、下降沿触发等。
3. 启动定时器计数:启动定时器计数器开始计数,同时等待外部信号的到来。
4. 捕获外部信号:当外部信号到达定时器输入端口时,定时器模块会自动将当前计数器的值存储到捕获寄存器中,从而记录下外部信号的时间戳。
5. 处理捕获结果:根据捕获寄存器中存储的时间戳信息,可以计算出外部信号的频率、周期、占空比等参数,或者进行时间同步和计时等操作。
需要注意的是,定时器输入捕获技术的精度和可靠性受到多种因素的影响,例如定时器时钟源的稳定性、外部信号的噪声和干扰、捕获寄存器的精度等。
因此,在实际应用中需要根据具体情况进行合理的配置和优化,以保证捕获结果的准确性和可靠性。
定时器输入捕获原理是一种基于定时器模块实现的高精度信号测量和处理技术,具有广泛的应用前景和实际价值。
输入捕捉
/********以下是延时函数********/
void Delay_ms(uint xms)
{
int i,j;
for(i=0;i<xms;i++)
{ for(j=0;j<1140;j++) ; }
}
/********以下是端口初始化函数********/
void port_init()
6. avr定时器/计数器1 --TC1 --输入捕捉模式(捕获外部事件模式)
T/C的输入捕捉单元可用来捕获外部事件,并为其赋予时间标记以说明此时间的发生时刻。外部事件发生的触发信号由引脚ICP1 (PD6)输入,也可通过模拟比较器单元来实现。时间标记可用来计算频率、占空比及信号的其它特征,以及为事件创建日志。当引脚ICP1上的逻辑电平(事件)发生了变化,或模拟比较器输出ACO电平发生了变化,并且这个电平变化为边沿检测器所证实,输入捕捉即被激发:16位的TCNT1数据被拷贝到输入捕捉寄存器ICR1,同时输入捕捉标志位ICF1置位。如果此时ICIE1 = 1,输入捕捉标志将产生输入捕捉中断。中断执行时ICF1自动清零,或者也可通过软件在其对应的I/O位置写入逻辑"1”清零。读取ICR1时要先读低字节ICR1L,然后再读高字节ICR1H。读低字节时,高字节被复制到高字节临时寄存器TEMP。CPU读取ICR1H时将访问TEMP寄存器。
操作步骤:
一、捕获输入端口初始化:捕获输入端ICP1(PD6)设为输入,DDRD&=(0<<PD6);
并使能PD6口的内部上拉电阻,PORTD|=(1<<PD6);
二、设置定时器的工作模式:TCCR1A=0X00 //普通模式,计数最大值为65535
stm32PWM输入捕获
stm32PWM输入捕获tm32定时器pwm输入捕获输入捕捉的功能是记录下要捕捉的边沿出现的时刻,如果你仅仅捕捉下降沿,那么两次捕捉的差表示输入信号的周期,即两次下降沿之间的时间。
如果要测量低电平的宽度,你应该在捕捉到下降沿的中断处理中把捕捉边沿改变为上升沿,然后把两次捕捉的数值相减就得到了需要测量的低电平宽度。
如果要的测量低电平太窄,中断中来不及改变捕捉方向时,或不想在中断中改变捕捉方向,则需要使用PWM输入模式,或使用两个TIM某通道,一个通道捕捉下降沿,另一个通道捕捉上升沿,然后对两次捕捉的数值相减。
PWM输入模式也是需要用到两个通道。
使用两个通道时,最好使用通道1和通道2,或通道3和通道4,这样上述功能只需要使用一个I/O管脚,详细请看STM32技术参考手册中的TIM某框图。
//0-----------------------一、概念理解PWM输入捕获模式是输入捕获模式的特例,自己理解如下1.每个定时器有四个输入捕获通道IC1、IC2、IC3、IC4。
且IC1IC2一组,IC3IC4一组。
并且可是设置管脚和寄存器的对应关系。
2.同一个TI某输入映射了两个IC某信号。
3.这两个IC某信号分别在相反的极性边沿有效。
4.两个边沿信号中的一个被选为触发信号,并且从模式控制器被设置成复位模式。
5.当触发信号来临时,被设置成触发输入信号的捕获寄存器,捕获“一个PWM周期(即连续的两个上升沿或下降沿)”,它等于包含TIM时钟周期的个数(即捕获寄存器中捕获的为TIM的计数个数n)。
6.同样另一个捕获通道捕获触发信号和下一个相反极性的边沿信号的计数个数m,即(即高电平的周期或低电平的周期)7.由此可以计算出PWM的时钟周期和占空比了frequency=f(TIM时钟频率)/n。
dutycycle=(高电平计数个数/n),若m为高电平计数个数,则dutycycle=m/n若m为低电平计数个数,则dutycycle=(n-m)/n 注:因为计数器为16位,所以一个周期最多计数65535个,所以测得的最小频率=TIM时钟频率/65535。
STM32定时器输入捕获模式测频率
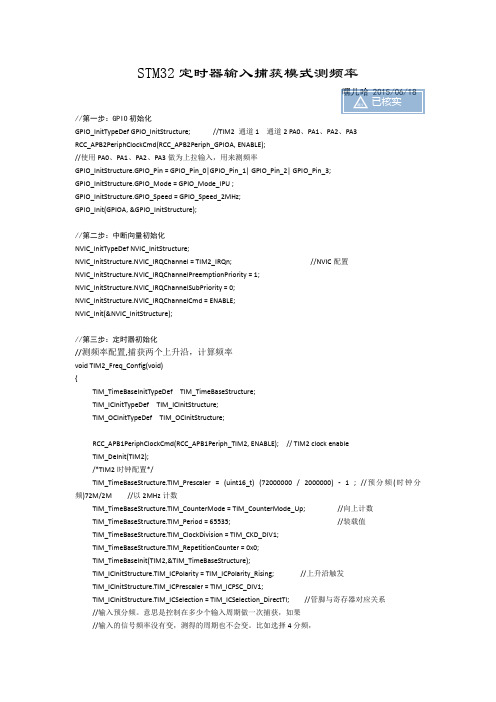
频)72M/2M //以 2MHz 计数
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
//向上计数
TIM_TimeBaseStructure.TIM_Period = 65535;
//装载值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
/* Get the Input TIM2IC_ReadValue value */ TIM2IC_ReadValue2[0] = TIM_GetCapture1(TIM2);
/* TIM2IC_ReadValue computation */ if (TIM2IC_ReadValue2[0] > TIM2IC_ReadValue1[0]) {
TIM2Capture[0] = (TIM2IC_ReadValue2[0] - TIM2IC_ReadValue1[0]); } else {
TIM2Capture[0] = ((0xFFFF - TIM2IC_ReadValue1[0]) + TIM2IC_ReadValue2[0]); } /* Frequency computation */ Frequency0= 2000000/ TIM2Capture[0];// 计算频率=2MHz/时钟计数 IM2CaptureNumber[0] = 0; TIM_ITConfig(TIM2, TIM_IT_CC1, DISABLE); } } else if(TIM_GetITStatus(TIM2, TIM_IT_CC2) == SET) { /* Clear TIM3 TIM2IC_ReadValue compare interrupt pending bit */ TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
PWM输入捕获(只使用一路定时器通道)
PWM输入捕获(只使用一路定时器通道)PWM(Pulse Width Modulation)输入捕获是一种用于测量外部信号的技术,它基于定时器的工作原理。
在PWM输入捕获中,只使用一路定时器通道来实现信号测量。
下面将详细介绍PWM输入捕获的原理和实现方法。
一、PWM输入捕获原理PWM输入捕获的基本原理是通过测量定时器通道引脚上的高电平脉冲的宽度来计算外部信号的周期和占空比。
通常,定时器会以固定的频率进行计数,并将计数值存储在特定的寄存器中。
当检测到外部信号的上升沿时,定时器开始计数,当检测到下降沿时,定时器停止计数。
停止计数后,可以通过读取定时器寄存器的值获取外部信号的宽度。
通过测量多个周期的宽度,可以计算出信号的周期和占空比。
二、PWM输入捕获的实现方法以下是一种使用单通道定时器实现PWM输入捕获的步骤:1.配置定时器模式和通道首先,需要将定时器配置为输入捕获模式和单通道工作模式。
可以根据具体的硬件平台和需求选择适合的定时器和通道。
2.配置定时器时钟和频率根据需要,设置定时器的时钟源和频率。
定时器的频率应与外部信号的频率匹配或适当倍频。
这样可以确保定时器的计数能够准确地测量外部信号的周期和宽度。
3.配置输入捕获触发源选择合适的外部引脚作为输入捕获触发源,并将其连接到定时器的通道引脚。
通常,触发源可以是外部信号上的上升沿或下降沿。
4.配置中断和寄存器启用定时器的输入捕获中断,并设置适当的中断优先级。
还需要配置定时器寄存器以存储捕获到的计数值。
5.中断服务函数当定时器捕获到外部信号时,会触发定时器的输入捕获中断。
可以编写相应的中断服务函数来处理捕获事件。
在中断服务函数中,可以读取定时器寄存器的值,并进行相应的后续计算和处理。
6.数据处理和应用获取到外部信号的周期和占空比后,可以进行相应的数据处理和应用。
例如,可以将测量结果用于控制系统的反馈控制、信号发生器、信号分析等应用。
7.循环测量根据需要,可以设置定时器为重复测量模式,以定期测量外部信号的周期和占空比。
单片机的定时器模式

单片机的定时器模式
单片机的定时器模式有以下几种:
1. 定时/计数模式(T/C mode):定时器用作定时器或者计数器,在设定时间或者计数到设定值后触发中断或者输出信号。
2. 输入捕获模式(Input Capture mode):定时器用于测量输入信号的脉冲宽度或者周期,在每次捕获到输入信号时记录定时器的值。
3. 输出比较模式(Output Compare mode):定时器用于与某个参考值进行比较,当定时器的值与参考值相等时,可以触发中断或者产生输出信号。
4. 脉冲宽度调制模式(PWM mode):定时器通过改变输出信号的占空比来生成脉冲宽度可调的方波,用于控制电机速度、LED亮度等应用。
5. 脉冲计数模式(Pulse Count mode):定时器用于计数输入信号的脉冲个数,在达到设定的脉冲数后触发中断或者产生输出信号。
这些定时器模式可以根据单片机的型号和品牌的不同而略有差异,具体的定时器模式可以参考单片机的技术手册或者开发工具的相关文档。
PWM输入模式捕捉4路PWM的周期和占空比

PWM输入模式捕捉4路PWM的周期和占空比PWM(Pulse Width Modulation,脉宽调制)输入模式是指将PWM信号通过输入端口接收,并对其周期和占空比进行捕捉和测量的功能。
在PWM输入模式下,通常可以选择4路PWM输入捕捉模式,即可以同时对4个PWM信号的周期和占空比进行测量。
首先,对于周期的测量,可以通过输入捕捉寄存器(ICR)来实现。
当PWM信号的边沿触发输入捕捉事件时,输入捕捉寄存器会记录当前计数器的值,从而获取到PWM信号的周期。
通过记录两个连续输入捕捉事件的时间差,即可计算出周期。
其次,对于占空比的测量,可以通过输入捕捉寄存器(ICR)和捕捉/比较寄存器(CCR)来实现。
当PWM信号的上升沿触发输入捕捉事件时,输入捕捉寄存器会记录当前计数器的值;当PWM信号的下降沿触发输入捕捉事件时,捕捉/比较寄存器会记录当前计数器的值。
通过获取这两个值的差,即可计算出PWM信号的高电平时间,并通过除以周期得到占空比。
需要注意的是,在进行PWM输入捕捉时,需要先配置相应的引脚为输入模式,并使能输入捕捉功能。
具体配置过程可以参考具体的MCU开发手册或者技术文档。
总结起来,PWM输入模式可以实现对4路PWM信号的周期和占空比的测量,通过配置相关寄存器可以获取PWM信号的周期和占空比,以满足不同的应用需求。
pwm输入捕获原理
pwm输入捕获原理PWM(Pulse Width Modulation)是一种通过改变信号的占空比来控制电压或电流的技术。
PWM输入捕获是指通过输入电路捕获并测量PWM信号的参数,如周期、占空比、频率等。
本文将详细阐述PWM输入捕获的工作原理。
首先,PWM信号是由高电平(高电压)和低电平(低电压)组成的周期性信号。
PWM输入捕获的原理就是利用外部硬件电路将这个周期性信号转换成时间间隔或频率。
常用的PWM输入捕获方法有两种:硬件计数器捕获和输入捕获/定时器(IC/Timer)捕获。
1.硬件计数器捕获硬件计数器捕获是指利用计数器来测量PWM信号的周期、占空比或频率。
计数器是一个递增计数的寄存器,在设定的时间基准下进行计数。
当捕获到一个PWM脉冲时,计数器的值就会被保存下来,然后根据这些值计算出具体的PWM参数。
具体步骤如下:1)初始化计数器,设置计数器的初始值为0。
2)设置计数器的时钟源和计数模式。
3)当捕获到一个PWM脉冲时,计数器停止计数,保存当前计数器的值。
4)根据计数器的值计算出PWM信号的参数,如周期、占空比或频率。
2. 输入捕获/定时器(IC/Timer)捕获输入捕获/定时器(IC/Timer)捕获是一种更高级的PWM输入捕获方法,它可以非常精确地测量PWM信号的参数。
这种方法利用了定时器和输入捕获模块来实现。
具体步骤如下:1)初始化定时器和输入捕获模块,设置定时器的时钟源和计数模式。
2)当捕获到一个PWM脉冲时,输入捕获模块记录下捕获脉冲的上升沿或下降沿的时间戳。
3)根据时间戳计算出PWM信号的参数,如周期、占空比或频率。
PWM输入捕获在实际应用中具有广泛的用途。
例如,它可用于测量电机的转速、计算电力质量参数、实现遥控器功能等。
由于能够精确地测量PWM信号的参数,因此PWM输入捕获常常被应用于需要高精度控制的系统中。
需要注意的是,在进行PWM输入捕获时,应根据实际需求选择合适的捕获模式、设置合适的输入电路和调整定时器的参数。