计算机控制作业答案
西工大2020年4月《计算机控制技术》作业机考参考答案
西工大2020年4月《计算机控制技术》作业机考参考答案
试卷总分:100 得分:96
本作业试题内容相同,只是题目和选项顺序是随机调整的,大家可放心学习使用
一、单选题(共25 道试题,共50 分)
1.17.若二进制数为010111.101,则该数的十进制表示为()。
A.23.5125
B.23.625
C.23.75
D.23.5
正确答案:A
2.15.字符A的ASCII码为41H,字符a的ASCII码为()。
A.41H
B.42H
C.61H
D.62H
正确答案:C
3.14.运算器的主要功能是()。
A.算术运算
B.逻辑运算
C.算术和逻辑运算
D.函数运算
正确答案:C
4.16.计算机中信息传递的三总线方式包括()。
A.地址总线、数据总线、控制总线
B.片总线、内总线、外总线
C.片内总线、内总线、外总线
D.内总线、数据总线、控制总线
正确答案:A
5.11.工业控制计算机是一种面向工业控制、采用标准总线技术和开放式()结构的计算机。
A.程序
B.体系
C.I/O
D.存储。
14秋西交《计算机控制技术》在线作业答案

西交《计算机控制技术》在线作业
一、单选题(共25 道试题,共50 分。
)
1. 在微计算机系统中,高速外设与内存储器进行批量数据传送时,应采用()
A. 无条件传送
B. 程序查询控制
C. 中断控制
D. 直接存储其存取
正确答案:D 满分:2 分得分:2
2. 8255A与外设间每个端口的数据线为()
A. 4位
B. 8位
C. 16位
D. 32位
正确答案:B 满分:2 分得分:2
3. CPU被动,外设主动的接口方式为()
A. 无条件程控方式
B. 查询控制方式
C. 中断控制方式
D. A,B,C都不对
正确答案:C 满分:2 分得分:2
4. 设被测温度的变化范围为0~100摄氏度,要求测量误差不超过0.1摄氏度,则应选用的A/D转换器的分辨率至少为()位
A. 4
B. 0
C. 10
D. 12
正确答案:C 满分:2 分得分:2
5. 完整的计算机系统应该包括()
A. 运算器、存储器和控制器
B. 主机和外设
C. 主机和应用程序
D. 硬件系统和软件系统
正确答案:D 满分:2 分得分:2
6. 字符A的ASCII码为41H,字符a的ASCII码为()
A. 41H
B. 42H
C. 61H
D. 62H
正确答案:C 满分:2 分得分:2
7. 在PID调节系统中,若想增强微分作用,正确的作法是()。
A. 加大系数TI
B. 加大系数KP
C. 加大系数KI。
计算机过程控制作业答案

2-6某水槽如题图2-1所示。
其中A 1为槽的截面积,R 1、R 2均为线性水阻,Q i 为流入量,Q 1和Q 2为流出量要求:(1)写出以水位h 1为输出量,Q i 为输入量的对象动态方程;(2)写出对象的传递函数G(s)并指出其增益K 和时间常数T 的数值。
图2-1解:1)平衡状态: 02010Q Q Q i +=2)当非平衡时: i i i Q Q Q ∆+=0;1011Q Q Q ∆+=;2022Q Q Q ∆+=质量守恒:211Q Q Q dthd A i ∆-∆-∆=∆ 对应每个阀门,线性水阻:11R h Q ∆=∆;22R h Q ∆=∆ 动态方程:i Q R hR h dt h d A ∆=∆+∆+∆2113) 传递函数:)()()11(211s Q s H R R S A i =++1)11(1)()()(211+=++==Ts KR R S A s Q s H s G i这里:21121212111111R R A T R R R R R R K +=+=+=;2Q112-7建立三容体系统h 3与控制量u 之间的动态方程和传递数,见题图2-2。
解:如图为三个单链单容对像模型。
被控参考△h 3的动态方程: 3233Q Q dt h d c ∆-∆=∆;22R h Q ∆=∆;33R hQ ∆=∆; 2122Q Q dt h d c ∆-∆=∆;11R hQ ∆=∆ 111Q Q dth d c i ∆-∆=∆ u K Q i ∆=∆ 得多容体动态方程:uKR h dth d c R c R c R dt h d c c R R c c R R c c R R dt h d c c c R R R ∆=∆+∆+++∆+++∆333332211232313132322121333321321)()(传递函数:322133)()()(a s a s a s Ks U s H s G +++==; 这里:32132133213213321321332211232132131313232212111;c c c R R R kR K c c c R R R a c c c R R R c R c R c R a c c c R R R c c R R c c R R c c R R a ==++=++=2-8已知题图2-3中气罐的容积为V ,入口处气体压力,P 1和气罐 内气体温度T均为常数。
《计算机控制技术》习题
南京工业大学继续教育学院《计算机控制技术》习题集2015学年度第一学期使用班级:HY电气升本141习题集1(绪论及第一章习题)一、填空题1.工业控制机包括(硬件)和(软件)两部分。
2.过程通道是计算机和生产过程之间信息传送和转换的连接通道,它包括(模拟量输入通道)和(模拟量输出通道)和(数字量输入通道)及(数字量输出通道)。
3.在A/D转换中,完成一次A/D转换的时间称为(孔径时间)。
4.在计算机控制系统中,生产过程和计算机直接连接,并受计算机控制的方式称为(在线)方式,又称(联机)方式。
5.计算机控制系统由(工业控制机)和(生产过程)两大部分组成。
6.接口是计算机与外部设备交换信息的桥梁,包括(输入接口)和(输出接口)。
7.计算机控制系统中,生产过程不和计算机相连,且不受计算机控制,而是靠人进行联系并作相应操作的方式称为(离线)方式,又称(脱机)方式。
8.ADC08909是一种(8)位逐次逼近式A/D转换器。
9.AD574A是一种(12)位逐次逼近式A/D转换器。
10.CD4051是单端的(8)通道开关。
二、判断题(判断下列各题,在题后的括号内,对的打“√”,错的打“×”。
)1.一个在线的系统一定是一个实时系统,一个实时控制系统一定是一个在线系统。
(×)2.直接数字控制系统属于计算机闭环控制系统。
(√)3.所有的模拟量通道都需要采样保持器。
(×)4.计算机控制系统中,操作指导系统属于开环控制结构。
(√)5.干扰可能来源于外部,也可能来源于外部。
(√)三、单项选择题(在下列每小题四个备选答案中选出一个正确答案,并将其字母标号填入题干的括号内。
)1.香农定理指出,如果模拟信号频谱最高频率为f max.,只要按采样频率f≥(C)采样,那采样信号y*(t)就能唯一的复观y(t)。
A.5f max B.3f max C.2f max D.10 f max2.1971年时计算机技术的( C )发展时期。
计算机控制系统(B)朱立达试题答案

东北大学继续教育学院计算机控制系统试卷(作业考核线上) B 卷学习中心:院校学号姓名(共 3 页)一、选择题(每题4分)1.单位阶跃输入下输出响应,经过( A )周期就稳定在设定值上。
A. TB. 4TC.3TD.2T2.下列哪个不是计算机控制系统控制过程的步骤?( C )A.数据采集B. 计算机控制量C. 数据转换D.输出控制信号3.连续控制系统的稳定性条件是S平面的( D )部分。
A单位圆内 B. 单位圆外 C. 右半 D.左半4.连续控制系统的不稳定性条件是S平面的( D )部分。
B.单位圆内 B. 单位圆外C. 左半D.右半5.二阶系统的超调量与( C )?A.固有频率无关,阻尼比无关B. 固有频率有关,阻尼比无关C. 固有频率有关,阻尼比有关D. 固有频率无关,阻尼比有关6. 低通滤波器可以让高于( A )Hz虑掉。
A. 80B. 60C. 70D.507.计算机控制系统稳定性条件是Z平面的( D )部分。
A. 左半B. 单位圆外C. 单位圆内D.右半8.下列属于共模干扰?( A )A电容的静电耦合 B. 长线传输的互感 C.变压器漏电 D.磁场耦合9.下列哪个不属于计算机控制系统的过程输入通道。
( C )A.温度B. 压力C. 继电器D.流量10.计算机控制系统是以( A )为核心部件的自动控制系统。
A.控制器B. 计算机C. 转换器D.保持器二、判断题(每题2分)1. PID的积分环节经常单独使用。
( F )2. 转速传感器的激励绕组与输出绕组之间在空间相差180°( T )3. 空间辐射干扰中来自通道的干扰最大。
( F )4. 一般采用多路通道共享采样/保持或模数转换器。
( T )5.被控对象可以是模拟量,不可以是开关量。
( F )6. 低通滤波器可让80Hz的工频信号无衰减地通过。
( T )7. 计算机控制系统的分析与设计是以系统的数学模型为基础。
( T )8. 计算机的硬件对计算机控制系统的非常重要,管理计算机的程序及过程控制的应用程序。
西工大20年10月《计算机控制技术》期末考试作业机考参考答案
A.错误
B.正确
正确答案:错误
2.芯片8255A工作方式0,有专用的中断请求和联络信号线,因此方式1通常用于查询传送或中断传送方式。
A.错误
B.正确
正确答案:错误
3.闭环控制系统的输出对控制过程没有影响。
A.错误
B.正确
正确答案:错误
4.在计算机控制系统中为了实现控制目标,不能采模拟化设计方法,只能采用离散化设计方法来设计控制器。
A.错误
B.正确
正确答案:错误
15.在信号电路中加装滤波器可抑制串模干扰。
A.错误
B.正确
正确答案:错误
5.中断方式传送最适用于高速外设与存储器之间交换成批数据的场合。
A.错误
B.正确
正确答案:错误
6.调理电路的主要作用是使传感器与A/D转换器的特性相匹配。
A.错误
B.正确
正确答案:正确
7.在三种基本I/O同步控制方式中,从数据传输速度而言,以DMA方式最好,中断控制次之,程序查询方式最差。
A.信息交换
B.信息处理
C.数据加工
D.数据存储
正确答案:A
24.计算机中使用总线结构的优点是( )。
A.减少信息传送线的数量
B.提高信息传送速度
C.减少信息传送的数量
D.以上都是优点
正确答案:A
25.下面为磁性材料的存储器是( )。
A.ROM
B.CD-ROM
C.三态门
D.硬盘
正确答案:D
二、 判断题 (共 25 道试题,共 50 分)
A.387
B.432
C.566
D.604
正确答案:C
计算机控制技术复习大作业及答案

《计算机控制技术》复习大作业及参考答案==========================================================一、选择题(共20题)1。
由于计算机只能接收数字量,所以在模拟量输入时需经( A )转换。
A.A/D转换器B.双向可控硅C.D/A转换器D.光电隔离器2。
若系统欲将一个D/A转换器输出的模拟量参数分配至几个执行机构,需要接入( D )器件完成控制量的切换工作。
A.锁存器锁存B.多路开关C.A/D转换器转换D.反多路开关3。
某控制系统中,希望快速采样,保持器的保持电容CH应取值( A )。
A.比较小B.比较大C.取零值D.取负值4. 在LED显示系统中,若采用共阳极显示器,则将段选模型送至( B ).A.阳极B.阴极C.阴极或阳极D.先送阴极再送阳极5。
电机控制意味着对其转向和转速的控制,微型机控制系统的作法是通过( B )实现的。
A.改变定子的通电方向和通电占空比B.改变转子的通电方向和通电占空比C.改变定子的通电电压幅值D.改变转子的通电电压幅值6。
计算机监督系统(SCC)中,SCC计算机的作用是(B)A.接收测量值和管理命令并提供给DDC计算机B.按照一定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关7。
键盘锁定技术可以通过(C)实现.A.设置标志位B.控制键值锁存器的选通信号C.A和B都行D.定时读键值8。
RS-232-C串行总线电气特性规定逻辑“1”的电平是(C).A.0.3 伏以下B.0.7伏以上C.—3伏以下D.+3伏以上9。
在工业过程控制系统中采集的数据常搀杂有干扰信号,( D)提高信/躁比.A.只能通过模拟滤波电路B.只能通过数字滤波程序C。
可以通过数字滤波程序/模拟滤波电路D.可以通过数字滤波程序和模拟滤波电路10.步进电机常被用于准确定位系统,在下列说法中错误的是( B )。
微型计算机控制系统作业
STOSW; 数据存储
INC BL ; 更换通道 LOOP ADC MOV AL,00111000B; CE=0,CS, R/C, INH=1, 芯片复位
MOV DX,2C2H
OUT DX,AL RET
AD574A
ENDP
2. 12位D/A转换器接口
端口地址译码器译出Y0地址为基地址BASE,则D/A高8为地址为BASE+1, 低8为地址为BASE+0
DOUT PROC MOV MOV MOV MOV NEXT: MOV OUT INC NEAR DX,300H CX,8 AH,0 BX, OFFSET BUF0 AL,[BX] DX, AL DX OUT DX,AL CALL DELAY INC INC RET DOUT ENDP AH BX DEC DX LOOP NEXT
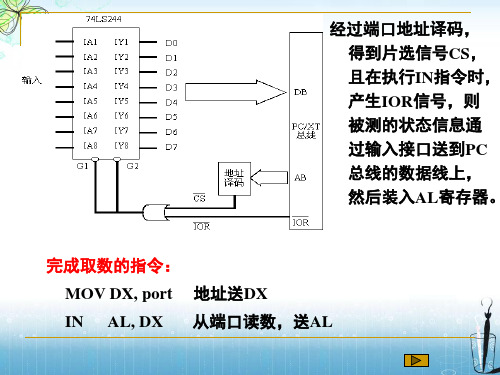
经过端口地址译码, 得到片选信号CS, 且在执行IN指令时, 产生IOR信号,则 被测的状态信息通 过输入接口送到PC 总线的数据线上, 然后装入AL寄存器。
完成取数的指令: MOV DX, port 地址送DX
IN
AL, DX
从端口读数,送AL
经过端口地址译码,得到 片选信号CS,执行 OUT指令时,产生IOW 信号,利用IOW的后沿 产生的上升沿可以锁存 数据;
利用DAC0832,运算放大器,多路开关CD4051等元器件与 PC/ISA总线工业控制机接口,设计8路模拟量输出系统, 请画出接口电路原理图,并编写8路模拟量输出程序。
DAC0832
D0 D1 D2 D7
DI 0 DI1 DI 2 DI 7
WR1
+12V
CD4051
A B C
I out 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1两种 USB口的特点及区别?通用指标,传输模式,U SB 器件,硬件接口。
答:两种 USB的特点:(1)USB 接口支持设备的热插拔功能 , 采用菊花式的连接 .(2)USB 有2电源线(5V),2 数据线 ,采用差分信号传输 ,可为连接在其上的设备提供 5V 电压 /100mA电流的供电 ,最大可提供 500mA的电流 .(3)一个 USB控制器可以连接多达 127个外设 ,而两个外设间的距离(线缆长度)可达 5 米. 两种 USB的区别 : 协议不同 ,USB1.1 传输速率是 12Mbps,USB2.0 传输速率是480Mbps.2光驱、硬盘、软驱的总线形式。
答:(1)光驱 :IDE ATA/ATAPI ,内部并行总线 .(2)硬盘:IDE SATA ,内部并行总线 .(3)软驱:软驱分内置和外置两种 ,内置软驱使用专用的 FDD接口 ,而外置软驱一般用于笔记本电脑 , 使用 USB接口 .3I2C、 SPI、SCI 总线的特点?答:(1)I2C 总线由数据线 SDA与时钟线 SCL两条线构成通信线路,既可以发送数据也可以接收数据,在 CUP与被控 IC 之间,IC 与 IC 之间都可以进行双向传送,最高传输速度为 400Kbps.(2)S PI 是一个环形总线结构 , 是一种标准的四线同步双向串行总线 , 在 SCK的控制下,两个双向移位寄存器进行数据交换 , 可以同时发出和接收串行数据 .(3)S CI 是一种通用异步通信接口 UART. SCI 模块采用标准非归零( NRZ)数据格式 ,能够实现多 CPU之间或同其他具有兼容数据格式 SCI 端口的外设进行数据通信 .4指出 RS-232、RS-485、 USB等总线的特点及发展趋势。
答:(1)RS-232 的特点:全双工数据传输,单端输入输出 , 有地线、发送和接受三条线即可实现数据传输 , 传输速率 20kb/s ,传输距离限于 15m,采用单端驱动和接收电路 . 采用负逻辑高电平为( -5--15v ),低电平为 (5-15v) ,电源电压为 +15v 或 +12v. (2)R S-485 的特点:半双工工作方式,差分信号传输,传输距离为几十米到上千米,速率 10Mbit/s, 采用屏蔽双绞线传输 . 可连接 32 个设备 . 电平逻辑“ 1”以两线间的电压差为 (+2 — 6V)表示;逻辑“ 0”以两线间的电压差为 (-2 —6V)表示,外接电源电压一般为 5v.(3)USB 即插即用 ,菊花式连接 ,有 2电源线( 5V),2数据线,而两个外设间的距离(线缆长度)可达 5米,差分信号传输 , 可外接 127 个设备.5、简要归纳 ISA、 PCI 和 STD三种端口的特点。
答:ISA:有 98 根信号线,数据线宽 16 位,地址线宽 24 位,总线时钟 8MHz,中断源为边沿触发,数据传输速度为 16MB/S。
PCI:64 位总线( 3.3V )或者 32 位( 5V),最高总线频率为 33.3MHz/66MHz,数据传输速度为 80MB/S,(最高传输速度为 133MB/S),支持 10 个外设。
STD:公共母板结构, 56 根信号线,是 8/16 位总线标准,有 8/16 条数据线, 16/24 地址线, 22 条控制线。
6、概要描述计算机系统如何通过 PCI 端口对外部设备进行控制,指出地址范围。
答:信号输入时:首先外设作为中断源(int a# ~ int h# 引脚是低电平有效的中断请求线)申请中断,在 CLK的上升沿到来时,系统采样 AD0~AD31,把信号送到微处理器,触发中断。
接着 C/BEJ~ C/BE0 配置 I/O 读写,在 FRAME低电平时,传送数据存储地址,FRAME高电平且 TRDY低电平时,开始读取数据。
信号输出时:首先 C/BEJ~ C/BE0 配置存储器读及 I/0 写,接着 FRAME高电平且 IRDY 低电平时,开始写数据。
I/O 口地址空间分为两部分,把 1024个端口的前 246 个( 000H— 0FFH)专用系统板上的 I/O 接口芯片使用,后 768个( 100H—3FFH)为 I/O 接口扩展卡使用。
6、74LS244与74LS273的驱动是多少?它们有什么不同的特点和应用?答: 74ls244 是一个 8 个通道单向传输的三态门缓冲器,灌电流可以达到 24mA 。
按at89c51 上拉电阻 10K来计算, 5/10000=0.5mA ,可以驱动近 50个 IO 口。
74LS273是 8通道单向的地址锁存器,不仅可以作为驱动器,还有存储的功能,灌电流可以达到 8mA。
集成电路知识: 54系列军用产品和 74系列民用产品; H高速、L低功耗、 S肖特基(低功耗、大电流、超高速、反向恢复时间极短)、A 改进型、LS(下拉强、上拉弱)、ALS 、HC(CMOS 接口、上下拉一样)、HCT(TTL 接口)74ls244 是一个 8 个通道单向传输的三态门缓冲器,灌电流可以达到 50mA 。
按at89c51 上拉电阻 10K来计算, 5/10000=0.5mA , 74ls244 最多可以驱动 100个 IO 口。
74LS273是 8通道单向的地址锁存器,不仅可以作为驱动器,还有存储的功能,灌电流可以达到 25mA。
7、图2 -16 中的 VD的作用是什么?如果将 K接在三极管 e 极有什么缺点?答①因继电器线圈呈电感性,为了克服三极管断开时继电器线圈反电势,所以线圈两端必须加装续流二极管 D,以保护三极管。
②如将继电器线圈接在三极管 e 极的话,电路形成负反馈,使得线圈无法最大电压导通;另外由于电路形成负反馈,会影响导通速度;③从图中可看出三极管有电压转换的作用,从低电压的信号到高电压的驱动,但如果接在e 极驱动不了继电器。
8、采用 74ls244 和 74ls273 与 PC/ISA 总线工业控制机接口,设计 8 路数字(开关量)输入接口和 8 路数字量(开关量)输出接口。
请画出接口电路原理图,并分别编写数字量输入和数字量输出程序。
答:利用 74LS244作为开关量的输入,一端接外部开关量信号输入,一端接到PC的 8位数据线,利用 74LS273作为开关量的输出,一端接到 PC的 8 位数据线,一端接开关量信号输出。
片选端口地址为 port1 ,输出片选端口地址为 port2 。
输入程序: MOV DX, port1 IN AL, DX输出程序: MOV AL, DATAMOV DX, port2OUT DX, AL9、用 8位 A/D 转换器 ADC0809 与 PC/ISA 总线工业控制机接口,实现 8位模拟量采集。
请画出接口原理图,并设计出 8 路模拟量的数据采集程序。
程序:MOVX A ,@DPTR ;读取转换后的数字量 MOV @R0 ,A ;存入片内 RAM 单元 INC DPTR ;指向下一模拟通道INC R0 ;指向下一个数据存储单元10、采样保持器的作用是什么?是否所有的模拟量输入通道中都需要采样保持器?为什么?答:( 1)保存即将转换的信号,避免某些随时间变化较快的信号在转换时发生变化,提高转换精度,或者模拟量输入信号的频率范围。
( 2)不是所有的模拟量输入通道中都需要采样保持器,当被测信号变化缓慢时,若A/D 转换器转换时间足够短,可以不加采样保持器。
11、一个 8位 A/D 转换器,孔径时间为 100us,如果要求转换误差在转换器的精度 0.4% 求允许转换的正弦模拟信号的最大频率是多少?答: f=0.4/(2*pi*100*10 -6*100)=6.4hz12、采用 DAC0832 和与 PC/ISA 总线工业控制机接口,请画出接口电路原理图,并编写 D/A 转换程序。
若 DAC0832 的 CS 的口地址为 BASE ,则 7FH 数据转换为模拟电压的接口程序为:DAOUT :MOV DA , BASEMOV AL , 7FHOUT DX , ALRET13、思考:还有其他方法可以代替A/D 吗?答:可以采用 VF 转换的方法,就是压频转换芯片,把电压模拟量转换成频率信号,然后通过检测,转换成数字信号输出。
14、分别画出 D/A 转换器的单极性和双极性电压输出电路,并分别推导出输出电压与输入数字量之间的关系式。
V OUT1 =-V REF*( D/2 n)V OUT2 =V REF(D/2 n-1-1) 15、试叙步进电机的特点答: 1)步进电机的参数一频率、力矩、步距角和相电流等表示。
2)步进电机输入的是脉冲,输出的是位移,误差不累积,改变脉冲的频率,改变速度。
改变各相导通顺序可以控制步进电机的方向。
3)一般步进电机的精度为步进角的 3~5%,。
4)步进电机的力矩与其中的电流成正比,由于电感效应力矩会随转速的升高而下降。
5)步进电机高于一定的速度运行时,若电机转矩小于负载转矩时,会产生失步或睹转,睹转不会烧毁电机,但伴有呼叫声。
16,试叙步进电机驱动器的种类和特点答:步进电机驱动器的种类 :A,单电压驱动:简单、价格低廉。
B,高低压驱动:简单实用、较单电压驱动性能有一定提高,但是高压固定,不能兼顾各种频率。
C,恒流崭波:采用较高的驱动电压,控制相电流快速导通和保持恒定,在一定频率范围具有均匀的力矩,大大提高运行频率,但可能产生噪声,特别在一定频率范围产生震荡。
D,调频调压:采用可调的驱动电压,保证相电流快速导通和恒定,在一定频率范围具有均匀的力矩,大大提高运行频率,不会产生噪声。
E,细分电路驱动:采用细分电路或者等分调节各相电流,将原来的一步细分为多步运行,减少脉冲当量,提高精度。
4.2某系统的连续控制设计为 D(S)=U(S)/E(S)=(1+T 1S)/(1+ T2S)试用双线性变换法,前向差分法,后向差分法分别求取数字控制器 D(Z) ,并分别给出三种方法对应的递推控制算法。
2. 双线性变换法:前向差分法:后向差分法:4.3 什么是数字 PID 位置控制算法和增量型控制算法?试比较它们的优缺点。
答: 位置型输出表达式为u(k) K p e(k) K p增量型输出表达式为: u(k) u(k1) (K p小。
位置型算法用到过去的误差的累加,容易产生较大的累加误差。
( 2)增量型算法得出的是控制的增量, 误动作影响小, 必要时通过逻辑判断限制或 禁止本次输出,不会影响系统的工作。
位置型算法的输出是控制量的全部输出,误动作 影响大。
3)通常增量型算法计算量少,位置型算法计算量大。
4)通常增量型算法容易计算,位置型算法易于观测参数变化。
4.4 某系统的连续控制设计为 D(S)=U(S)/E(S)=(1+0.17S)/(1+0.085S) 试写出相应数字控制器 的4.位置型控制算式和增量型控制算式。