称重传感器静态标定系统
压力传感器静态标定实验

压力传感器的静态标定实验一、实验目的要求1、了解压力传感器静态标定的原理;2、掌握压力传感器静态标定的方法;3、确定压力传感器静态特性的参数;二、实验基本原理标定与校准的概念新研制或生产的传感器需要对其技术性能进行全面的检定,以确定其基本的静、动态特性,包括灵敏度、重复性、非线性、迟滞、精度及固有频率等;例如,对于一个压电式压力传感器,在受力后将输出电荷信号,即压力信号经传感器转换为电荷信号;但是,究竟多大压力能使传感器产生多少电荷呢换句话说,我们测出了一定大小的电荷信号,但它所表示的加在传感器上的压力是多大呢这个问题只靠传感器本身是无法确定的,必须依靠专用的标准设备来确定传感器的输入――输出转换关系,这个过程就称为标定;简单地说,利用标准器具对传感器进行标度的过程称为标定;具体到压电式压力传感器来说,我们用专用的标定设备,如活塞式压力计,产生一个大小已知的标准力,作用在传感器上,传感器将输出一个相应的电荷信号,这时,再用精度已知的标准检测设备测量这个电荷信号,得到电荷信号的大小,由此得到一组输入――输出关系,这样的一系列过程就是对压电式压力传感器的标定过程,如图1所示;图1 压电式压力传感器输入――输出关系校准在某种程度上说也是一种标定,它是指传感器在经过一段时间储存或使用后,需要对其进行复测,以检测传感器的基本性能是否发生变化,判断它是否可以继续使用;因此,校准是指传感器在使用中或存储后进行的性能复测;在校准过程中,传感器的某些指标发生了变化,应对其进行修正;标定与校准在本质上是相同的,校准实际上就是再次的标定,因此,下面都以标定为例作介绍;标定的基本方法标定的基本方法是,利用标准设备产生已知的非电量如标准力、位移、压力等,作为输入量输入到待标定的传感器,然后将得到的传感器的输出量与输入的标准量作比较,从而得到一系列的标定数据或曲线;例如,上述的压电式压力传感器,利用标准设备产生已知大小的标准压力,输入传感器后,得到相应的输出信号,这样就可以得到其标定曲线,根据标定曲线确定拟合直线,可作为测量的依据,如图2所示;有时,输入的标准量是由标准传感器检测而得到的,这时的标定实质上是待标定传感器与标准传感器之间的比较,如图2所示;输入量发生器产生的输入信号同时作用在标准传感器和待标定传感器上,根据标准传感器的输出信号可确定输入信号的大小,再测出待标定传感器的输出信号,就可得到其标定曲线;图2 压电式压力传感器的标定曲线与拟合直线图3 用标准传感器进行标定的方法三、实验设备活塞式压力计、标准压力表被标定的压力传感器、数字万用表、标准砝码、工作液体蓖麻油;四、实验方法和要求1.根据要调试的压力仪表量程及准确度等级选择相适应的压力计和压力计所使用传压介质的油液;2.将压力计放到便于操作和坚固无震的平台上,调整压力计水平调节螺丝,使水平泡的气泡位于中心位置此时压力计处于水平状态;压力计的工作环境温度为20±10℃,相对湿度80%以下,周围空气不得含有腐蚀性气体;3.初使用时,首先用汽油清洗压力计各部分,然后在手摇压力泵和测量系统的内腔注满传压介质,并将内腔的空气排除;传压介质的油液必须经过过滤,不许混有杂质和污物;4.旋转手摇泵的手轮,检查油路是否通畅,若无问题,将要调试检测的压力仪表的压力传感器安装到压力计的测试接口上;5.通过压力泵手轮将内腔的空气排放干净,避免内腔的气泡对压力测量带来的影响;同时检查测量管道是否漏油,如有,必须解决此问题后才能进行下一步操作;6.打开油杯阀门,左旋手轮,使手摇压力泵的油缸充满油液,关闭油杯阀门;7.配合DC24V稳压电源、高精度万用表既可进行压力仪表的调试及检测工作;打开针形阀,右旋手轮,产生初压,使承重底盘升起,直到定位指示筒的墨线刻度相齐为止;每个测试点检测时,必须承重底盘升到定位指示筒的墨线刻度相齐位置;操作时,必须使底盘按顺时针方向旋转,角速度保持在30-120转/分之间,借以克服磨擦阻力的影响;记录每点检测结果;零点压力的测量必须打开油杯阀门使测量管道内的压力与环境大气压相等;8.检测时根据压力仪表的压力量程范围分为5-10个测试点进行上行程及下行程检测,将检测结果填入相关的检定记录报表内,做好检定记录报表;9.测试完成后做好压力室的卫生工作,保证压力室干净整洁;10.定期做好压力计的维护保养等工作;五、实验内容1、根据实验设备设计实验电路连线图,装配、检查各种仪器、传感器及压力表;2、检查实验电路及油路;3、加载、卸载,注意数据变化,并记录;压力表加载、卸载实验记录压力传感器加载、卸载实验记录4、分析、计算、处理实验数据,作出压力传感器的静态特性图,非线性、迟滞、重复性;5、用方和根法计算系统误差;五、实验注意事项1、每次加砝码时注意一定要放稳;2、在正行程测量时,当压力由1MP增加到2MP需要更换大砝码时,一定要将工作液体的压力值降低到1MP以下后才能进行更换操作;同样在反行程测量时,压力由2MP降低到1MP需要更换小砝码时,也一定要将工作液体的压力降低到1MP以下后才能进行更换操作;3、实验数据应记录清楚、准确;4、加减压操作时,注意正反行程的含义,不能反复进行调节;。
机车车辆称重系统_使用说明书
98·接口:并行接口、USB接口
99·工作温度范围:0C~45C, 湿 度:10~90%RH
100·电源:220V10%,50Hz/60Hz±1Hz;额定功率:81W
101·数据格式:通常、特殊命令和TOLEDO连续格式
12
1·工作环境湿度:≤95%;
2·工作电源:220VAC(-15%+10%),50Hz±2%;
3·传感器工作环境温度:-30℃+65℃;
4·仪表工作环境温度:-10℃+40℃;
5·软件工作环境:正版操作系统。
13
型
-()机车车辆称重轨道衡(x-)
钢轨型号
单秤长度
轨距
单秤数量
单秤最大秤量
示值形式
传力结构
图2
传感器
GCS系列静态电子轨道衡机车车辆称重系统优选配置为GD柱式传感器,还可配置PGD(GD)、SB传感器等。
GD传感器
GD摇柱式称重传感器是梅特勒-托利多(常州)称重设备系统有限公司开发的新一代车辆衡用称重传感器,它安装维护方便、性能稳定可靠,适合在各种恶劣环境下使用。
性能优点
6·解决防潮、防腐问题
80·串口输出:连续输出,扩展连续输出,命令输出(限定格式)
软
ScaleWin
ScaleWin机车车辆称重管理软件是梅特勒-托利多(中国)根据用户要求专为机车车辆称重管理系统设计的配套软件,它基于Windows2000、WindowsXP操作系统,采用Access数据库,具有称重数据的采集、灵活多样的磅单和报表定制、准确快捷的数据查询等功能,能够满足不同场合的称重需求,提高称重操作的工作效率,切实保障客户的经济利益。梅特勒-托利多(中国)作为一家专业的衡器制造商,ScaleWin机车车辆称重管理软件保证了计量数据准确,提高了管理效率,降低了运行成本,促进企业信息化管理。其主要功能如下:
电容式车辆称重装置静态性能测试与分析

0 引
言
1 车载式 电容 称重传 感器
电容式车辆称重装置主要检测部件是车载式 电容称重传感器 , 其安装如图 1 所示 。 电容 上极 板部 件 中包括 电容上极 板 和上屏 蔽 板, 安装 在车 架下 部 , 右居 中。 电容 下极 板部件 左 包 括 电容 下极 板 和 下屏 蔽 板 , 装 在 轮 轴 中部 的 安 上方 , 电容两极板面相对且上下对正 , 车辆的每根
维普资讯
第3 肥 工 业 大 学 学报 ( 自然科 学版)
J OURNAL OF HEFE IUNI VERS TY CHNOLOGY I OF TE
Vo. O No 7 13 .
J1 07 u .2 0
电容 式 车辆 称 重 装 置 静 态 性 能测 试 与 分 析
徐树 山 , 谢
摘
煜 , 杨 三序
460) 7 0 0
( 商丘师范学院 物理 与信息工程 系 , 河南 商丘
要: 针对 目前车辆称重方法 的不足 , 开发 了基于 电容传感 器的车载式车辆称重装置 。文章从结构设计 、 测
量原理对称重装置作 了介绍 , 重点讨论 了其静态 特性 测试过程 , 提供 了相应 的试验数据 , 根据 试验数据 , 从非 线性 、 复性、 重 迟滞性等方 面进行 了误差 分析 , 出了迟 滞补偿办法 , 示了该电容称重装置的突 出优点 ; 给 显 电容 式车辆称重装置具有一定 的实用价值 。 关键词 : 电容称重传感 器 ; 静态性能 ; 迟滞性 ;软件 补偿
Ab ta t Ai n tt es o tg f h r s n t o fta f ih n sr c : mig a h h ra eo ep e e tme h do r fi weg ig,ak n fta f i hn t c id o r fi weg i g c d vc a e n c p ctn eweg ig i e eo e .Th e ie Sd sg n tu t r n h a u — e ieb s d o a a i c ih n sd v lp d a ed vc ’ e ina d sr cu ea d t eme s r ig p i cpe a eito u e ,a d t eme s rn r c s fsa i c a a trsisi ds u s d i eal n rn il r r d c d n h a u ig p o e so t t h r c eit ic s e n d ti n c c s . Th ea e x e i e t aai i e a d er ra ay i sm a ei e mso o l e rt er ltd e p rm n t g v n, n r o n l ssi d tr fn n i a i d s n n y,r p a a i t e e t bl y i a dh se e i. Th o r cin m eh d o y tr ssi r s n e . i c p ctn ew eg ig d v c o n y t r ss ec re to t o fh s ee i sp e e t d Ths a a ia c ih n e ief r ta f e ilsh so t tn i g a v n a e n sp a t a l n a piain r fi v h ce a u sa dn d a tg sa d i r ci b ei p l t . c c c o Ke r s c p ctn eweg ig ta s u e ;s ai h r ce it ;h se e i;s fwa ec m p n a in ywo d :a a i c ihn r n d c r t t c a a trsi a c c y tr ss o t r o e st o
称重系统讲解汇总
称重系统讲解汇总称重系统,顾名思义,是用来测量物体的重量的系统。
它在各种应用中都有广泛的应用,如货物称重、工业生产过程中的材料重量确定、医疗领域的患者体重监测等。
本文将对称重系统的原理、结构和常见类型进行详细介绍。
称重系统的原理:称重系统的基本原理是通过测量物体受到的重力大小来确定其重量。
当物体被放置在秤盘上时,它会受到地球引力的作用,而称重系统会通过传感器等装置测量到这一作用力的大小,并将其转化为相应的重量数值。
称重系统的结构:称重系统通常由称量传感器、信号处理器和显示器等组成。
称量传感器一般被安装在秤盘底部,能够感知到物体对秤盘的作用力。
信号处理器负责将传感器采集到的力信号转化为数字信号,并进行处理。
而显示器用来显示被称重物体的重量数值。
称重系统的类型:根据使用场景和测量精度的不同,称重系统可分为普通称重系统和精密称重系统两种类型。
普通称重系统是指用于一般场合的称重系统,它的主要特点是称量范围较大,但测量精度一般较低。
这类系统通常采用传感器阻抗式称量或电气式称量的原理。
它适用于多种领域,如家用电子秤、货物称重等。
这些系统通常具有较低的成本和较高的可靠性。
精密称重系统是指用于对重量测量精度要求较高的场合的称重系统。
这类系统通常采用电子天平或电子称重传感器等高精度的测量装置。
它广泛应用于实验室、医疗机构、贵金属鉴定等需要精确重量测量的场合。
这些系统具有较高的测量精度和稳定性,但其成本也相对较高。
除了普通称重系统和精密称重系统外,还有一些特殊的称重系统,如动态称重系统和无人机称重系统等。
动态称重系统可用于测量运动状态下的物体重量,如车辆装载重量监测。
无人机称重系统则可以实时监测无人机的重量,以确保其安全运行。
总的来说,称重系统是一种用于测量物体重量的系统,它能够应用于多个领域,如工业制造、医疗健康等。
根据实际需求,我们可以选择适合的称重系统类型来满足不同场景下的重量测量需求。
随着科技不断进步,称重系统的测量精度和稳定性也将不断提高,为我们的生活和工作带来更多的便利。
测试信号实验——电子秤标定报告
静态标定实验报告一、实验目的1、了解电子称的称重原理;2、掌握测试系统的定标方法;3、掌握测试系统静态特性的分析方法。
二、实验原理1.称重原理: 利用传感器的应变特性, 传感器将感受到的力或力矩的变化转变成变化的模拟信号。
该模拟信号经放大调理电路, 再经采样转变成便于计算机处理的数字信号, 由CPU运算后, 根据键盘指令及程序将结果输出到显示器上。
2、在一定的标准条件下, 采用一定等级的标定设备对测试系统进行多次往复测试的过程通过对系统的静态测试, 得到输出量与输入量的函数关系。
三、实验步骤1、将电子称、电源和万用表连接成测试系统;接通电源后, 预热1分钟, 然后进行预平衡调试, 并使得在无外加载荷的情况出为0;按从小到大的顺序逐步加载荷, 共10级, 利用示波器和数字表读出输出电压信得到加载过程结果;然后, 从大到小, 逐级卸载, 直至为空载, 利用数字万用表读出输出电压信号加到卸载过程结果;2、重复步骤3和4, 得到5组加、卸载结果;关闭电源, 拆卸连接线, 将相应实验器材放置原位。
四、实验仪器电子称1台万用数字表1个电源1台五、实验结果1.标定曲线的绘制①实验数据列表: 加卸载过程标定曲线:① 2.标定系数及标定误差计算标定系数:标定曲线的斜率即灵敏度为1K 3.2443Uk==②定误差:标定曲线表达式:① 3.测试系统误差计算:某物体质量m=2.431kg, 电子称示数mo=2.448kg, 电压值U=3.225。
②最小二乘误差:③滞误差:综合误差:直接代数和:方和根:4、软件实现结果:将质量用电压的函数表示, 在labview中编程, 框图如下图示:。
静态汽车衡与动态汽车衡的区别
2、仪表基本功能 8142-pro 称重显示仪表生产厂:梅特勒托利多公司
内分
ቤተ መጻሕፍቲ ባይዱ
辨率:1/500,000 最大显示分度数:50,000A/D 转换率:2~10 次/秒准确度等级:OMIL 零点温度系数:±0.1μv/℃量程温度系数:6ppm/℃数据输出:标准 20mA 电流环、RS-232C
和 RS-422 串行 ASCⅡ输出使用温度范围:-10~40℃相对湿度:≤90%
故障处理:用消防车冲洗清理后正常并采取防尘措施。 (6)故障现象:检斤过程中,附近有气体放空时数字跳变 检查分析:震动仪表台面显示正常,分析为干扰信号串入所致。检查接地线和屏蔽线, 有松动。 故障处理:用气焊焊接牢固。 注:不能用电焊以免损伤传感器 (7)故障现象:仪表显示不稳,有时呈上升或下降变化 检查分析:用模拟传感器检查仪表正常,检查传感器均正常。经询问,车辆上秤检斤时一般 不熄火,分析其原因是某处虚焊,车辆震动引起。测传感器接线板激励电压约 10.5V 变化(正 常为 12V),仔细检查+Ex 虚焊。 故障处理:重新焊接后正常。
图 2 模拟传感器
2.维修实例 (1)故障现象:开机无显示 检查分析:a.电源没加上;b.保险断;c.数码显示部分坏;d.仪表损坏。 故障处理:a.检查电源;b.查明原因后更换保险;c.维修、更换显示部分及仪表。 (2)故障现象:开机显示 OFL(OFL 为测量溢出) 检查分析:显示 OFL 说明输入信号高于量程最大值,检查限位装置正常,甩开传感器接 线用模拟传感器接入,仪表显示正常,故障在机械部分,打开传感补偿器接线板测正激励(+Ex) 和负激励(-Ex)间电阻值偏高(正常为 380Ω/只),逐次断开传感器接线测量正信号(+SiG)和 负信号(-SiG)之间电阻,发现 1 脚(见图 3)阻值偏差较大(正常为 350Ω 左右),进一步测量 +Ex 和-SiG、+Ex 和+SiG、-Ex 和+SiG、-Ex 和-SiG 间电阻值发现-Ex 和+SiG 间电阻值无穷 大,说明电阻开路。 故障处理:撑起秤体更换传感器后正常。 注:开机显示—OFL 时分析和处理同上。
称重传感器的原理及应用
称重传感器的原理及应用随着技术的进步,由称重传感器制作的电子衡器已广泛地应用到各行各业,实现了对物料的快速、准确的称量,特别是随着微处理机的出现,工业生产过程自动化程度化的不断提高,称重传感器已成为过程控制中的一种必需的装置,从以前不能称重的大型罐、料斗等重量计测以及吊车秤、汽车秤等计测控制,到混合分配多种原料的配料系统、生产工艺中的自动检测和粉粒体进料量控制等,都应用了称重传感器,目前,称重传感器几乎运用到了所有的称重领域。
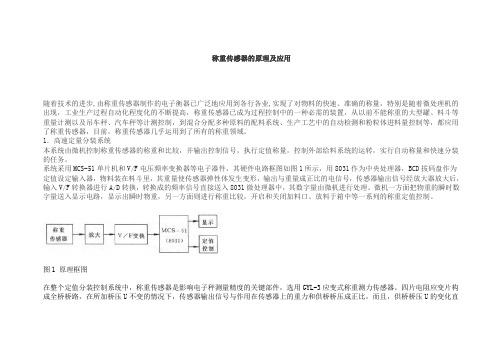
1.高速定量分装系统本系统由微机控制称重传感器的称重和比较,并输出控制信号,执行定值称量,控制外部给料系统的运转,实行自动称量和快速分装的任务。
系统采用MCS-51单片机和V/F电压频率变换器等电子器件,其硬件电路框图如图1所示,用8031作为中央处理器,BCD拔码盘作为定值设定输入器,物料装在料斗里,其重量使传感器弹性体发生变形,输出与重量成正比的电信号,传感器输出信号经放大器放大后,输入V/F转换器进行A/D转换,转换成的频率信号直接送入8031微处理器中,其数字量由微机进行处理。
微机一方面把物重的瞬时数字量送入显示电路,显示出瞬时物重,另一方面则进行称重比较,开启和关闭加料口、放料于箱中等一系列的称重定值控制。
图1 原理框图在整个定值分装控制系统中,称重传感器是影响电子秤测量精度的关键部件,选用GYL-3应变式称重测力传感器。
四片电阻应变片构成全桥桥路,在所加桥压U不变的情况下,传感器输出信号与作用在传感器上的重力和供桥桥压成正比,而且,供桥桥压U的变化直接影响电子称的测量精度,所以要求桥压很稳定。
毫伏级的传感器输出经放大后,变成了0-10V的电压信号输出,送入V/F变换器进行A/D转换,其输出端输出的频率信号加到单片机8031定时器1的计数、输入端T1上。
在微机内部由定时器0作计数定时,定时器0的定时时间由要求的A/D转换分辩率设定。
定时器1的计数值反映了测量电压大小即物料的重量。
称重传感器的yd303-sl标定校验方法
称重传感器的yd303-sl标定校验方法
yd303sl型称重传感器的标定校验方法如下:
1. 首先,确定标定重量。
可以使用实际的物体,比如标准砝码,或者使用其他已经通过校验的称重设备。
2. 将标定重量放置在传感器的称重平台上。
3. 通过传感器的接口连接到计算机或数据记录器,在计算机上运行相应的称重软件或数据记录软件。
4. 对传感器进行零点校准。
即在没有任何物体放置在传感器上时,将传感器输出的称重值调整为零。
根据传感器的说明书或使用手册,进行相应的零点校准。
5. 将标定重量放置在传感器的称重平台上,记录传感器输出的称重值。
6. 根据标定重量和传感器输出的称重值,可以计算出传感器的校准系数或修正系数。
计算的公式根据具体的传感器型号和技术规格而定。
7. 如果校准系数或修正系数超出了预定的范围,需要进行重新校准或修正。
8. 根据传感器的校准系数或修正系数,可以将传感器的输出称重值进行修正,
以获得更准确的称重结果。
9. 定期进行校准的检查和维护,确保传感器的准确性和稳定性。
可以根据传感器的说明书或使用手册提供的指导,制定合理的校准周期和方法。
需要注意的是,以上的标定校验方法是基于一般的原则和步骤,具体的操作和细节可能会根据传感器的型号和技术要求有所不同。
在进行标定校验时,最好参考传感器的说明书或使用手册,按照厂商提供的指导进行操作。
同时,为了获得更准确的称重结果,可以在实际操作中结合其他校准工具和方法,比如使用多个不同的标定重量进行校验,或者使用专业的校准设备进行校准。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南京航空航天大学综合课设报告题目:称重传感器设计及性能测试学院:自动化学院专业:测试计量技术及仪器组员:031230325 ***031230326 杨宇科2015年7月4日检测技术综合课设一、设计内容1、设计一个电阻应变式载荷传感器及传感器特性自动测试校准系统。
应用力学、传感器技术等相关知识设计一个载荷传感器,要求使用AUTOCAD 绘制传感器机械图。
责任设计人:李鸿影。
2、贴片工艺,力学分析推导应变和载荷的关系。
责任设计人:李鸿影。
3、设计传感器调理电路,要求电路在满足一定测试精度的前提下,尽可能简单,但可以设计两个以上的电路。
要求输出电压范围为-3V~3V 。
责任设计人:杨宇科。
4、编写虚拟仪器程序,完成校准和对传感器静态特性曲线的显示,计算传感器的线性度(用最小二乘线性度、或端基线性度表示)、灵敏度(包括放大器,V/kg)、重复误差、迟滞误差等静态指标。
责任设计人:杨宇科。
二、传感器结构设计与材料选择(1)传感器结构的机械制图图2.1 实际实验原理图 ⎪⎭⎫ ⎝⎛+-+++-+=EW M PL EW M PL EW M PL EW M PL uk u i 12124 (式2.1)图2.2 AntoCAD绘制机械原理图(2)弹性体的材料选择因为弹性体在称重传感器中主要用来承载重物的载荷,形成变形,以便粘贴在弹性体上的应变片感受到变形,从而得到重物质量,实现称重传感器的设计功能。
所以,一般对弹性体有如下具体的要求:1.强度高:具有较强的抗压(或抗拉)强度,以便在高载荷下有足够的安全性能。
2.温度系数小且稳定3.弹性滞后、弹性后效小4.良好的机械加工和热处理性能5.耐腐蚀性能好常用的弹性体材料有:铬钢,合金钢,铬锰弹簧钢,铍青铜,铝合金本次设计的传感器弹性体采用硬铝合金进行制作,以下对硬铝合金的性能指标进行简单概述:硬铝合金主要指铝—铜系的铝合金材料,这类合金的抗拉强度高,具有较好的塑性,具有较高的疲劳性能和断裂韧度,耐热性和加工性能良好,但耐蚀能力较低,需要进行防腐保护。
以2A11硬铝合金为例:*其热学性能如下:线膨胀系数:−50~20℃ 21.8μm∙(m∙Κ)−120~100℃ 22.9μm∙(m∙Κ)−1质量热容:924(100℃)J∙(kg∙Κ)−1热导率:T4:118(25℃) W∙(m∙Κ)−1*其电学性能如下:20℃电阻率:T4:54nΩ∙m*其室温力学性能:弹性模量E:71GPa切变模量G:27GPa屈服强度σ0.2:250MPa抗拉强度σb:410MPa伸长率δ10:15%泊松比μ: 0.31抗剪强度στ: 270MPa疲劳强度σ−1: 125MPa(3)总结与体会在设计机械图时,由于没有具体的数据,只能靠直尺测量,因此会有些许微小的误差,不过可以大体看出来测试机械原理,一开始设计时选择面会有一些问题,不过在我弄懂AutoCAD的三维分布就很好解决了,最后用“差集”方法打洞完成。
三视图和实体三维图均反映在一张图上。
三、贴片工艺与力学特性分析(1)贴片工艺分析由电路理论和传感器原理可知,采用单臂测量时输出为:u i=uk4ε1(式3.1)采用差动半桥测量时输出为:u i=uk4(ε1−ε2)(式3.2)采用差动全桥测量时输出为:u i=uk4(ε1−ε2−ε3+ε4)(式3.3)又(ε1=−ε2=−ε3=ε4)(式3.4)可知采用差动全桥时灵敏度最高,为差动半桥测量的2倍,单臂测量的4倍。
综上所述:应该使用4片应变片粘贴在悬臂梁上构成差动全桥测量电路。
具体粘贴工艺与步骤如下:1.准备工作:对弹性体的表面进行处理,保证干净整洁光滑平整;2.粘贴应变片;3.连线组成测量电桥,务必使对臂电阻变化相反,已构成差动电路,消除温度等的影响;4.复查;5.固化;(2)等截面悬臂梁的力学特性分析根据称重传感器的量程要求为0——500g,属于小量程测量。
由(二)可知,采用悬臂梁结构(如图3.1所示)进行设计。
以下就等截面悬臂梁进行力学特性分析:图3.1由材料力学可知:应变片粘贴处的应变为:ε0=σE=6Pl0bℎ2E(式3.5)则测得的重力为:P=bℎ2E24l0ε0 (式3.6)由(式3.5)、(式3.6)可知,应变片所测应变ε0与力P作用的位置l0有关,换言之,系统所测得的力F的大小随力P作用位置l0的变化而变化。
同时,所测力P 的大小还会受到因载荷不正中而引起的偏心带来的扭矩的影响。
(3)带角钢形状刚体的等截面悬臂梁的力学特性分析为了解决(2)中的传感器的输出随载荷的位置而改变及载荷不正中带来的影响,在(2)中等截面悬臂梁的自由端加上如图所示的角钢形状的刚体。
以下就带角钢形状刚体的等截面悬臂梁(如图3.2所示)进行力学特性分析:由材料力学可知,作用于角钢形状刚体上的力P与弯矩之差∆M成正比,即:P∝ΔM=M1−M2(式3.7)可得梁上所贴4个应变片所感受到的应变值分别为:ε1=PL2+MEW(式3.8)ε2=PL1+MEW(式3.9)ε3=−PL2+MEW(式3.10)ε4=−PL1+MEW(式3.11)图3.2由电桥输出特性可知:u i=uk4(ε1−ε2−ε3+ε4)=uk4(PL2+MEW−PL1+MEW+PL2+MEW−PL1+MEW) u i=uk2P(L1−L2)EW(式3.12)(式8)中(L1−L2)为两组应变片间的距离。
由(式8)可知,电桥输出与载荷位置无关,从而解决了(2)中的问题。
(4)双连孔悬臂梁力学特性分析由(3)中的(式8)可知,为了提高系统灵敏度,增大即单位力P作用下产生的电压u i,可以通过减小应变片粘贴部位即悬臂梁的实际工作部分的弯曲截面系数W,即减小工作部分的横截面面积,所以通过在悬臂梁上开两个互相连通的孔,以便进一步提高系统的灵敏度,如右图→图3.3所示。
(5)总结与体会通过整个力学分析,让我对传感器的应变效应实际体会更加加深。
实际工作时也可以通过仿照这次设计选择差动电桥的图3.3方法来增大灵敏度和实际应用电桥时应变片的贴片位置和方法。
虽然推导过程曾经出现过一些错误,在看书后及时发现并改正,也算加深对全桥电路的理解和印象了。
四、调理电路设计图4.1 Protel原理图图4.2 PCB原理图层1图4.3PCB 原理图层2(1)增益设计分析恒流源电路放大线路图4.4三运放测量放大器局部电路图(2) 由《数字化测试技术》课程中有关测量放大器的内容可知:设加在运放1同向端的电压为V1,加在运放2同向端的电压为V2,若运放1、运放2、运放3均为理想运放,可得三运放测量放大器第一级的闭环放大倍数为:A f1=1+R5+R7R V2(式4.1)第二级的闭环放大倍数为:A f2=R9R8(式4.2)为了提高电路的抗共模干扰能力和抑制漂移的能力,根据上下对称的原则进行电阻配置,取R5=R7,R8=R10=R9=R11可得整个三运放测量放大器的闭环放大倍数为:A f=V OV1−V2=−(1+2R5R V2)(式4.3)其中V1−V2即为差动全桥的输出电压,由(式3.12)可知V1−V2=u i=uk2P(L1−L2)EW可知传感器输出电压经调理电路输出的电压为:V O=A f(V1−V2)=A f u i=−(1+2R5R V2)uk2P(L1−L2)EW(式4.4)又系统要求输出电压V O范围为-3V~3V为了满足这个要求,需要对下面这个参数进行详细设计:−(1+2R5R V2)uk2(L1−L2)EW(式4.5)具体取值包括电阻R5=5.1kΩ、电阻R V2=5kΩ、电源电压u=5V、应变片粘贴位置L1和L2、应变片灵敏度系数k、弹性体的弹性模量E和弯曲截面系数W (2)调零参数设计图4.5差动电桥及调零电路局部电路图一般电桥四个桥臂的应变片的标称电阻阻值是相等的,但实际上是存在偏差的,这就造成在弹性体受力为0是,电桥的输出不为0。
但是实际要求电桥在测量前输出为零,这就要求在电桥测量电路上上附加调零电路,即在电路中增加电阻R 6和电位器R V1,如图4.5所示。
由电路理论可知,R 6和R V1将构成三角形连接,等效桥臂电阻受其影响后变为:(其中n 1+n 2=1)R 1′=n 1R V1+1n 2R 6 (式4.6) R 2′=n 2R V1+1n 1R 6 (式4.7) 阻值变化为:ΔR 1′=R 12R 1+n 1R V1+1n 2R 6 (式4.8) ΔR 2′=R 22R 2+n 2R V1+1n 1R 6 (式4.9) 可得电阻变化最大量为:ΔR 1max ′=R 12R 1+R 6(式4.10) ΔR 2max′=R 22R 2+R 6 (式4.11) 同时,由于引入调零电路,会带来一定的传感器的灵敏度误差:δ=R R 62(1+R R 6)2∗ΔR R (式4.12)由(式4.10)和(式4.11)可知,R 6的大小决定了调零电路的调节范围,R 6越小,调零电路的调节范围越大。
但是为了尽可能减小调零电路对于测量电路的影响,R 6和R V1应在可能的范围内尽量选取得大一些。
综上所述,本次传感器设计是R 6=10kΩ,R 1=R 2=R 3=R 4=R =350Ω 可调节桥臂电阻值为:ΔR max ′=11.84Ω, ΔR max′R =0.034(3)总结与体会这次实验的信号调理电路比较简单,加上之前自己有自学过protel ,所以protel 设计部分相对比较轻松,只用了一个晚上就做完了。
真正的设计其实远比这复杂,因为protel 官方库里面器件很有限,而实际应用中所用的器件可能千奇百怪,所以从原理图设计开始,设计者可能就要开始制作器件原理图符号,画pcb 图要制作器件封装,要设计电气规则,要考虑电磁干扰,要考虑器件布局及走线等等各方面的内容。
但是,通过这次简单的任务,可以熟悉整个设计流程,对于加深对软件的理解其实大有帮助。
在一个学期没有用过protel 后,我对于其设计已经很生疏,经过这次作业,我又重新入门了一次。
五、虚拟仪器程序设计(1)电压测量显示系统设计(2)传感器特性实际测量数据均在图中显示(3)总结与体会这次课设,labview程序设计部分是最有挑战性的部分,也是我收获最大的部分。
虽然labview上手快,但因为这学期没有选虚拟仪器这门课,我对labview设计一无所知,要在几天的时间内完成课程设计还是很有难度的一件事。
最开始的时候对labview很多控件的用法一点都不熟悉,程序一设计就出错,后来慢慢看帮助文档才开始对labview熟悉起来。
关于用labview做上位机静态标定系统这方面的资料,网上实在少的可怜,能找到的寥寥几篇论文也只是给出前面板的内容,程序框图是怎样的根本看不到,而且连程序的设计思路也没有。