Wavelet Neural Network Based on NARMA-L2 Model for Prediction of Thermal Characteristics in a Fe
小波神经网络在手写数字识别中研究与应用
l 引言
字符识别 技术是 模式 识别 领域研 究 的热点 问题 , 目的是 利用计算 机对 印刷或手 写字符 进行 自动识 别 和分类 。数 字识 别是字符 识别领 域 的一个 重要 分支 ,在 邮件 自动分 拣 、银 行 票据 处理 、财 务账单 处 理等 方 面有很 高 的应 用价 值 。 目前 , 手写数字 识别 的方法 主要 有 :模板 匹配法 、逻 辑推理 法 、模 糊 判别 法 和神经 网络法 等 。现行 的识 别技 术存 在 误识 率 高 、 识 别速度 慢等 问题 ,因此 ,设 计速度 快 、精度 高 的数 字识 别
系统 是 努 力 的 目标 。
再对 ( t )进行伸缩 与平 移变换 ,可以得到小波基函数。
(
式 中 ,a 为尺度伸 缩因子 ,b为 时间平移 因子 ,a ,b∈R,
a≠ 0。
小 波分析 中所用 到 的小波 函数具 有多样 性 ,常用 的小 波 函数有 Ha 小 波 、Moe 小波 、 M xcn小 波 ( r r rt eia 简称 Mar r 小 波 ) ab cis 波 ( 、D u ehe 小 简称 d b小波 )等 ,在 此设计 中选 用 Mol 小波 函数作 为神 经网络隐层的激励 函数。 rt e
神 经 网络 技术是 人工 智能研 究领 域 的一个 重要分 支 ,它
具 有 自组 织 、 自学习 、分 布式存 储和 并行 处理 等特点 ,广 泛 应用在模式识别 、 自动控制 和专 家系统等方面 。 对数 字识别 技术详 细研 究 的基础 上 ,提 出将 小波 神经 网 络应用 于手写数字识别技术 中 ,克服 了传 统 B P算法容易 陷入 局部极小点和 收敛速度慢等 缺点 ,提高了识别速度和识别率 。
一种基于NARMAX模型的小波神经网络构造和实现
关 键 词 : 波神经 网络 ; A MA 小 N R X模型 ; 双正交小波
中 图 分 类 号 : P 8 T 12 文 献标 志码 : A
目前 小波 和神经 网络结合 的主 要途径 是辅 助式结 合 和嵌 套式 结合 . 小波 与神 经 网络 的辅 助式 结 合 有两 种方 式 : 种是 用神 经 网络求小 波 系数或参 数 , 如 D u ma 一 例 a g n用 神 经 网络 求 出 G b r a o 小波最 优 系数 ; 一种 另
摘 要 : 出了一种基于 N R X模 型的小波神经 网络 结构确定 和权 系数估计 算法. 提 A MA 采用 N R X模 型 A MA
和 双 正 交 小 波 函数 来 构 造 小 波 神 经 网 络 , 别 人 脸 图像 , 验结 果 表 明 用 本 文 构 造 的 小 波 神 经 网 络 能 提 高识 别 正 确 识 实 率和识别速度.
S 一 { ( ) … , 1 忌一 1 2 忌 , , 2 尼一 咒 ) … ; N( ) … ,N( 1 忌 , J ( ); ( ) … I ( 2 ; I 忌 , I 走一 n ; ( 一 1 , , ( 一 e1 ; ; N) 0 O (一m ), 中 项数为: —N4∑ +∑ . Mk )… M M) 则S 的 P -
的小 波神 经 网络构造 方法 , 采用 双正 交小 波[ , 它运用 到人 脸 图像 识别 中 , 1将 ] 取得 了很好 的效果 .
1 小 波神 经 网 络 的 结构 确 定 和 权 系数 估 计 算 法
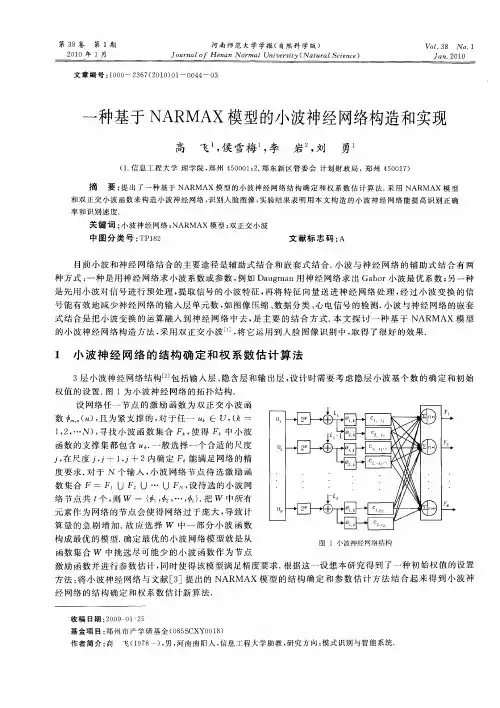
3 小波 神经 网络结 构 包 括输 入层 、 层 隐含 层和输 出层 , 设计 时需 要 考虑 隐层 小 波基 个数 的确定 和初 始 权值 的设 置. 1 图 为小 波 神经 网络 的拓扑 结构. 设 网络任 一节 点 的激 励 函数 为 双正 交 小 波 函 数 … ( , 为 紧支撑 的 , 于 任一 ∈ U,志一 ) 且 对 (
高精度自适应小波神经网络人工智能方法探索
高精度自适应小波神经网络人工智能方法探索高精度自适应小波神经网络是一种基于小波变换和人工神经网络结合的人工智能方法,广泛应用于信号处理、图像识别、数据分析等领域。
该方法通过将小波变换和神经网络相结合,可以有效地提取数据的特征,较好地解决数据处理中的一些问题,同时具有高效、高精度、自适应等优点。
下面将对该方法进行详细讨论。
一、小波变换小波变换是一种时频分析方法,它可以将信号分解为不同尺度和频率的小波包,并将每个小波包的特征信息提取出来。
小波变换有以下两种类型:1. 连续小波变换(CWT)连续小波变换将信号与一个连续小波进行卷积,得到一系列连续的小波系数,不同的小波系数对应不同的尺度和频率。
离散小波变换将信号分解为不同尺度和频率的离散小波包,通过滤波和下采样操作,最终得到离散小波系数。
二、神经网络神经网络是一种模拟人脑神经元之间相互连接的计算模型,它能够通过学习经验来进行数据处理和分析。
神经网络由多个神经元组成,每个神经元接受来自其他神经元的输入,并根据输入计算输出。
神经网络训练的过程就是不断地调整神经元之间的连接权值,使网络可以更准确地进行预测和分类。
小波神经网络是将小波变换和神经网络相结合的方法,它将小波变换得到的特征作为神经网络的输入,利用神经网络的学习能力来构建模型并进行数据处理和预测。
小波神经网络的主要流程如下:1. 信号分解:将信号进行小波变换,得到多个小波系数。
2. 特征提取:将小波系数作为神经网络的输入,通过神经网络进行特征提取和数据降维。
3. 神经网络训练:利用已知的样本数据训练神经网络模型。
高精度自适应小波神经网络是对小波神经网络进行改进的方法,它通过引入自适应激活函数和粒子群优化算法来提高模型的精度和稳定性。
具体地,该方法将小波系数输入到神经元中,通过自适应激活函数计算输出,并利用粒子群优化算法动态调整神经元之间的连接权值。
优点:1. 可以有效地提取信号的特征,较好地解决信号处理中的一些问题。
小波变换与神经网络技术的滋养特征提取及识别应用
小波变换与神经网络技术的滋养特征提取及识别应用近年来,小波变换与神经网络技术已经在图像、音频、信号等领域广泛应用,特别是在特征提取和识别方面取得了许多重要进展。
本文将介绍小波变换和神经网络技术的原理及其在特征提取和识别中的应用。
一、小波变换原理小波变换是一种时间-频率分析方法,它将时域信号分解成不同尺度和不同频率的子信号,可以帮助我们更好地理解信号的局部特征。
在小波分析中,小波函数是一种长度有限的函数,它具有自相似性、局部化和可变性等特点。
小波变换的基本过程是将原始信号分解成一组小波系数,这些系数包含了信号在不同尺度上的特征信息,包括低频和高频成分。
其中,低频成分代表信号的整体趋势,高频成分反映了信号的局部细节。
二、神经网络技术原理神经网络是一种模拟人类神经系统运作的计算模型。
它由大量简单的单元组成,这些单元相互连接并通过学习来实现特定任务。
神经网络可以通过多次迭代来优化网络连接权重以及神经元的激活函数,从而得到更好的分类和识别效果。
在神经网络中,网络的输入层接收原始数据,隐含层和输出层则通过多层非线性变换将输入数据映射到具有特定意义的特征空间中。
神经网络的输出层通常表示分类或者识别结果。
三、小波变换与神经网络技术在特征提取中的应用小波变换和神经网络技术已经被广泛应用于图像、音频、信号等领域,特别是在特征提取和识别方面。
以下是一些典型应用案例:1.图像特征提取在图像处理中,小波变换可以将图像分解为不同的频率和尺度。
通过选取合适的小波函数和分解层数,可以提取出图像的不同特征,如边缘、纹理等。
这些特征可以被用于分类、识别和双目视觉等应用中。
神经网络可以通过卷积层和全连接层等深度学习结构学习这些特征,并将其映射到更高层次的特征空间中。
这些特征被广泛应用于计算机视觉任务,如图像分类、目标检测和物体识别等。
2.音频特征提取在音频处理中,小波变换可以将音频信号分解为不同频率的子信号。
这些子信号可以用于声音识别、语音合成、语音分析等应用。
小波变换与神经网络融合法在油页岩近红外光谱分析中的应用
便携式近红外光谱技术可实现野外 目标 的现场检测 , 且 不用粉碎样 品,不使用化学试剂 , 不会对环境造成 污染 [ 3 。 I
页岩含 油率检测 , 使用矿物与油 的合成 样品数据 库 ,采用小 波变换对样 品原 始光 谱数 据进 行 处理 ,提 取近 似 系数 形成 AN N输入矩阵 , 并通过 比较原始数据 AN N模 型与小波特征 数据 AN N模 型的建模速度 与预测精 度 ,寻找提高 野外现场
富的油页岩等新 型非 常规能 源 , 作 为常 规油气 资源 的替代 ,
然后再进行神经 网络建模 。为了验 证有效性 , 利用 3 O个油页岩合成样品 , 从 中随机选择 2 o个用 于训 练 ,另 外l o个用于预测 , 并分别使用全谱数据与小波特征数据进行了 1 o次神经 网络建模 。 结果表 明,全谱 数据 建
模速度均值 为 5 7 0 . 3 3 s ,预测残差 平方 和及 相关 系数均值分别为 0 . 0 0 6 0 1 2 及0 . 8 4 3 7 5 ;而小波神经网络法
对应 的以上均值为 3 . 1 5 S , 0 . 0 0 2 0 4 8及 0 . 9 5 3 1 9 。由此说 明小波神经 网络法优 于全谱 数据建模法 ,为油页
岩含油率的快速 、 高精度检测提供 了一种新方法 。 关键词 近红外光谱 ; 小 波变换 ;神经网络 ; 油页岩 ; 含油率
文献标识码 : A D OI :1 0 . 3 9 6 4 / ] . i s s n . 1 0 0 0 — 0 5 9 3 { 2 0 1 3 ) 0 4 — 0 9 6 8 — 0 4
《神经网络与深度学习综述DeepLearning15May2014

Draft:Deep Learning in Neural Networks:An OverviewTechnical Report IDSIA-03-14/arXiv:1404.7828(v1.5)[cs.NE]J¨u rgen SchmidhuberThe Swiss AI Lab IDSIAIstituto Dalle Molle di Studi sull’Intelligenza ArtificialeUniversity of Lugano&SUPSIGalleria2,6928Manno-LuganoSwitzerland15May2014AbstractIn recent years,deep artificial neural networks(including recurrent ones)have won numerous con-tests in pattern recognition and machine learning.This historical survey compactly summarises relevantwork,much of it from the previous millennium.Shallow and deep learners are distinguished by thedepth of their credit assignment paths,which are chains of possibly learnable,causal links between ac-tions and effects.I review deep supervised learning(also recapitulating the history of backpropagation),unsupervised learning,reinforcement learning&evolutionary computation,and indirect search for shortprograms encoding deep and large networks.PDF of earlier draft(v1):http://www.idsia.ch/∼juergen/DeepLearning30April2014.pdfLATEX source:http://www.idsia.ch/∼juergen/DeepLearning30April2014.texComplete BIBTEXfile:http://www.idsia.ch/∼juergen/bib.bibPrefaceThis is the draft of an invited Deep Learning(DL)overview.One of its goals is to assign credit to those who contributed to the present state of the art.I acknowledge the limitations of attempting to achieve this goal.The DL research community itself may be viewed as a continually evolving,deep network of scientists who have influenced each other in complex ways.Starting from recent DL results,I tried to trace back the origins of relevant ideas through the past half century and beyond,sometimes using“local search”to follow citations of citations backwards in time.Since not all DL publications properly acknowledge earlier relevant work,additional global search strategies were employed,aided by consulting numerous neural network experts.As a result,the present draft mostly consists of references(about800entries so far).Nevertheless,through an expert selection bias I may have missed important work.A related bias was surely introduced by my special familiarity with the work of my own DL research group in the past quarter-century.For these reasons,the present draft should be viewed as merely a snapshot of an ongoing credit assignment process.To help improve it,please do not hesitate to send corrections and suggestions to juergen@idsia.ch.Contents1Introduction to Deep Learning(DL)in Neural Networks(NNs)3 2Event-Oriented Notation for Activation Spreading in FNNs/RNNs3 3Depth of Credit Assignment Paths(CAPs)and of Problems4 4Recurring Themes of Deep Learning54.1Dynamic Programming(DP)for DL (5)4.2Unsupervised Learning(UL)Facilitating Supervised Learning(SL)and RL (6)4.3Occam’s Razor:Compression and Minimum Description Length(MDL) (6)4.4Learning Hierarchical Representations Through Deep SL,UL,RL (6)4.5Fast Graphics Processing Units(GPUs)for DL in NNs (6)5Supervised NNs,Some Helped by Unsupervised NNs75.11940s and Earlier (7)5.2Around1960:More Neurobiological Inspiration for DL (7)5.31965:Deep Networks Based on the Group Method of Data Handling(GMDH) (8)5.41979:Convolution+Weight Replication+Winner-Take-All(WTA) (8)5.51960-1981and Beyond:Development of Backpropagation(BP)for NNs (8)5.5.1BP for Weight-Sharing Feedforward NNs(FNNs)and Recurrent NNs(RNNs)..95.6Late1980s-2000:Numerous Improvements of NNs (9)5.6.1Ideas for Dealing with Long Time Lags and Deep CAPs (10)5.6.2Better BP Through Advanced Gradient Descent (10)5.6.3Discovering Low-Complexity,Problem-Solving NNs (11)5.6.4Potential Benefits of UL for SL (11)5.71987:UL Through Autoencoder(AE)Hierarchies (12)5.81989:BP for Convolutional NNs(CNNs) (13)5.91991:Fundamental Deep Learning Problem of Gradient Descent (13)5.101991:UL-Based History Compression Through a Deep Hierarchy of RNNs (14)5.111992:Max-Pooling(MP):Towards MPCNNs (14)5.121994:Contest-Winning Not So Deep NNs (15)5.131995:Supervised Recurrent Very Deep Learner(LSTM RNN) (15)5.142003:More Contest-Winning/Record-Setting,Often Not So Deep NNs (16)5.152006/7:Deep Belief Networks(DBNs)&AE Stacks Fine-Tuned by BP (17)5.162006/7:Improved CNNs/GPU-CNNs/BP-Trained MPCNNs (17)5.172009:First Official Competitions Won by RNNs,and with MPCNNs (18)5.182010:Plain Backprop(+Distortions)on GPU Yields Excellent Results (18)5.192011:MPCNNs on GPU Achieve Superhuman Vision Performance (18)5.202011:Hessian-Free Optimization for RNNs (19)5.212012:First Contests Won on ImageNet&Object Detection&Segmentation (19)5.222013-:More Contests and Benchmark Records (20)5.22.1Currently Successful Supervised Techniques:LSTM RNNs/GPU-MPCNNs (21)5.23Recent Tricks for Improving SL Deep NNs(Compare Sec.5.6.2,5.6.3) (21)5.24Consequences for Neuroscience (22)5.25DL with Spiking Neurons? (22)6DL in FNNs and RNNs for Reinforcement Learning(RL)236.1RL Through NN World Models Yields RNNs With Deep CAPs (23)6.2Deep FNNs for Traditional RL and Markov Decision Processes(MDPs) (24)6.3Deep RL RNNs for Partially Observable MDPs(POMDPs) (24)6.4RL Facilitated by Deep UL in FNNs and RNNs (25)6.5Deep Hierarchical RL(HRL)and Subgoal Learning with FNNs and RNNs (25)6.6Deep RL by Direct NN Search/Policy Gradients/Evolution (25)6.7Deep RL by Indirect Policy Search/Compressed NN Search (26)6.8Universal RL (27)7Conclusion271Introduction to Deep Learning(DL)in Neural Networks(NNs) Which modifiable components of a learning system are responsible for its success or failure?What changes to them improve performance?This has been called the fundamental credit assignment problem(Minsky, 1963).There are general credit assignment methods for universal problem solvers that are time-optimal in various theoretical senses(Sec.6.8).The present survey,however,will focus on the narrower,but now commercially important,subfield of Deep Learning(DL)in Artificial Neural Networks(NNs).We are interested in accurate credit assignment across possibly many,often nonlinear,computational stages of NNs.Shallow NN-like models have been around for many decades if not centuries(Sec.5.1).Models with several successive nonlinear layers of neurons date back at least to the1960s(Sec.5.3)and1970s(Sec.5.5). An efficient gradient descent method for teacher-based Supervised Learning(SL)in discrete,differentiable networks of arbitrary depth called backpropagation(BP)was developed in the1960s and1970s,and ap-plied to NNs in1981(Sec.5.5).BP-based training of deep NNs with many layers,however,had been found to be difficult in practice by the late1980s(Sec.5.6),and had become an explicit research subject by the early1990s(Sec.5.9).DL became practically feasible to some extent through the help of Unsupervised Learning(UL)(e.g.,Sec.5.10,5.15).The1990s and2000s also saw many improvements of purely super-vised DL(Sec.5).In the new millennium,deep NNs havefinally attracted wide-spread attention,mainly by outperforming alternative machine learning methods such as kernel machines(Vapnik,1995;Sch¨o lkopf et al.,1998)in numerous important applications.In fact,supervised deep NNs have won numerous of-ficial international pattern recognition competitions(e.g.,Sec.5.17,5.19,5.21,5.22),achieving thefirst superhuman visual pattern recognition results in limited domains(Sec.5.19).Deep NNs also have become relevant for the more generalfield of Reinforcement Learning(RL)where there is no supervising teacher (Sec.6).Both feedforward(acyclic)NNs(FNNs)and recurrent(cyclic)NNs(RNNs)have won contests(Sec.5.12,5.14,5.17,5.19,5.21,5.22).In a sense,RNNs are the deepest of all NNs(Sec.3)—they are general computers more powerful than FNNs,and can in principle create and process memories of ar-bitrary sequences of input patterns(e.g.,Siegelmann and Sontag,1991;Schmidhuber,1990a).Unlike traditional methods for automatic sequential program synthesis(e.g.,Waldinger and Lee,1969;Balzer, 1985;Soloway,1986;Deville and Lau,1994),RNNs can learn programs that mix sequential and parallel information processing in a natural and efficient way,exploiting the massive parallelism viewed as crucial for sustaining the rapid decline of computation cost observed over the past75years.The rest of this paper is structured as follows.Sec.2introduces a compact,event-oriented notation that is simple yet general enough to accommodate both FNNs and RNNs.Sec.3introduces the concept of Credit Assignment Paths(CAPs)to measure whether learning in a given NN application is of the deep or shallow type.Sec.4lists recurring themes of DL in SL,UL,and RL.Sec.5focuses on SL and UL,and on how UL can facilitate SL,although pure SL has become dominant in recent competitions(Sec.5.17-5.22). Sec.5is arranged in a historical timeline format with subsections on important inspirations and technical contributions.Sec.6on deep RL discusses traditional Dynamic Programming(DP)-based RL combined with gradient-based search techniques for SL or UL in deep NNs,as well as general methods for direct and indirect search in the weight space of deep FNNs and RNNs,including successful policy gradient and evolutionary methods.2Event-Oriented Notation for Activation Spreading in FNNs/RNNs Throughout this paper,let i,j,k,t,p,q,r denote positive integer variables assuming ranges implicit in the given contexts.Let n,m,T denote positive integer constants.An NN’s topology may change over time(e.g.,Fahlman,1991;Ring,1991;Weng et al.,1992;Fritzke, 1994).At any given moment,it can be described as afinite subset of units(or nodes or neurons)N= {u1,u2,...,}and afinite set H⊆N×N of directed edges or connections between nodes.FNNs are acyclic graphs,RNNs cyclic.Thefirst(input)layer is the set of input units,a subset of N.In FNNs,the k-th layer(k>1)is the set of all nodes u∈N such that there is an edge path of length k−1(but no longer path)between some input unit and u.There may be shortcut connections between distant layers.The NN’s behavior or program is determined by a set of real-valued,possibly modifiable,parameters or weights w i(i=1,...,n).We now focus on a singlefinite episode or epoch of information processing and activation spreading,without learning through weight changes.The following slightly unconventional notation is designed to compactly describe what is happening during the runtime of the system.During an episode,there is a partially causal sequence x t(t=1,...,T)of real values that I call events.Each x t is either an input set by the environment,or the activation of a unit that may directly depend on other x k(k<t)through a current NN topology-dependent set in t of indices k representing incoming causal connections or links.Let the function v encode topology information and map such event index pairs(k,t)to weight indices.For example,in the non-input case we may have x t=f t(net t)with real-valued net t= k∈in t x k w v(k,t)(additive case)or net t= k∈in t x k w v(k,t)(multiplicative case), where f t is a typically nonlinear real-valued activation function such as tanh.In many recent competition-winning NNs(Sec.5.19,5.21,5.22)there also are events of the type x t=max k∈int (x k);some networktypes may also use complex polynomial activation functions(Sec.5.3).x t may directly affect certain x k(k>t)through outgoing connections or links represented through a current set out t of indices k with t∈in k.Some non-input events are called output events.Note that many of the x t may refer to different,time-varying activations of the same unit in sequence-processing RNNs(e.g.,Williams,1989,“unfolding in time”),or also in FNNs sequentially exposed to time-varying input patterns of a large training set encoded as input events.During an episode,the same weight may get reused over and over again in topology-dependent ways,e.g.,in RNNs,or in convolutional NNs(Sec.5.4,5.8).I call this weight sharing across space and/or time.Weight sharing may greatly reduce the NN’s descriptive complexity,which is the number of bits of information required to describe the NN (Sec.4.3).In Supervised Learning(SL),certain NN output events x t may be associated with teacher-given,real-valued labels or targets d t yielding errors e t,e.g.,e t=1/2(x t−d t)2.A typical goal of supervised NN training is tofind weights that yield episodes with small total error E,the sum of all such e t.The hope is that the NN will generalize well in later episodes,causing only small errors on previously unseen sequences of input events.Many alternative error functions for SL and UL are possible.SL assumes that input events are independent of earlier output events(which may affect the environ-ment through actions causing subsequent perceptions).This assumption does not hold in the broaderfields of Sequential Decision Making and Reinforcement Learning(RL)(Kaelbling et al.,1996;Sutton and Barto, 1998;Hutter,2005)(Sec.6).In RL,some of the input events may encode real-valued reward signals given by the environment,and a typical goal is tofind weights that yield episodes with a high sum of reward signals,through sequences of appropriate output actions.Sec.5.5will use the notation above to compactly describe a central algorithm of DL,namely,back-propagation(BP)for supervised weight-sharing FNNs and RNNs.(FNNs may be viewed as RNNs with certainfixed zero weights.)Sec.6will address the more general RL case.3Depth of Credit Assignment Paths(CAPs)and of ProblemsTo measure whether credit assignment in a given NN application is of the deep or shallow type,I introduce the concept of Credit Assignment Paths or CAPs,which are chains of possibly causal links between events.Let usfirst focus on SL.Consider two events x p and x q(1≤p<q≤T).Depending on the appli-cation,they may have a Potential Direct Causal Connection(PDCC)expressed by the Boolean predicate pdcc(p,q),which is true if and only if p∈in q.Then the2-element list(p,q)is defined to be a CAP from p to q(a minimal one).A learning algorithm may be allowed to change w v(p,q)to improve performance in future episodes.More general,possibly indirect,Potential Causal Connections(PCC)are expressed by the recursively defined Boolean predicate pcc(p,q),which in the SL case is true only if pdcc(p,q),or if pcc(p,k)for some k and pdcc(k,q).In the latter case,appending q to any CAP from p to k yields a CAP from p to q(this is a recursive definition,too).The set of such CAPs may be large but isfinite.Note that the same weight may affect many different PDCCs between successive events listed by a given CAP,e.g.,in the case of RNNs, or weight-sharing FNNs.Suppose a CAP has the form(...,k,t,...,q),where k and t(possibly t=q)are thefirst successive elements with modifiable w v(k,t).Then the length of the suffix list(t,...,q)is called the CAP’s depth (which is0if there are no modifiable links at all).This depth limits how far backwards credit assignment can move down the causal chain tofind a modifiable weight.1Suppose an episode and its event sequence x1,...,x T satisfy a computable criterion used to decide whether a given problem has been solved(e.g.,total error E below some threshold).Then the set of used weights is called a solution to the problem,and the depth of the deepest CAP within the sequence is called the solution’s depth.There may be other solutions(yielding different event sequences)with different depths.Given somefixed NN topology,the smallest depth of any solution is called the problem’s depth.Sometimes we also speak of the depth of an architecture:SL FNNs withfixed topology imply a problem-independent maximal problem depth bounded by the number of non-input layers.Certain SL RNNs withfixed weights for all connections except those to output units(Jaeger,2001;Maass et al.,2002; Jaeger,2004;Schrauwen et al.,2007)have a maximal problem depth of1,because only thefinal links in the corresponding CAPs are modifiable.In general,however,RNNs may learn to solve problems of potentially unlimited depth.Note that the definitions above are solely based on the depths of causal chains,and agnostic of the temporal distance between events.For example,shallow FNNs perceiving large“time windows”of in-put events may correctly classify long input sequences through appropriate output events,and thus solve shallow problems involving long time lags between relevant events.At which problem depth does Shallow Learning end,and Deep Learning begin?Discussions with DL experts have not yet yielded a conclusive response to this question.Instead of committing myself to a precise answer,let me just define for the purposes of this overview:problems of depth>10require Very Deep Learning.The difficulty of a problem may have little to do with its depth.Some NNs can quickly learn to solve certain deep problems,e.g.,through random weight guessing(Sec.5.9)or other types of direct search (Sec.6.6)or indirect search(Sec.6.7)in weight space,or through training an NNfirst on shallow problems whose solutions may then generalize to deep problems,or through collapsing sequences of(non)linear operations into a single(non)linear operation—but see an analysis of non-trivial aspects of deep linear networks(Baldi and Hornik,1994,Section B).In general,however,finding an NN that precisely models a given training set is an NP-complete problem(Judd,1990;Blum and Rivest,1992),also in the case of deep NNs(S´ıma,1994;de Souto et al.,1999;Windisch,2005);compare a survey of negative results(S´ıma, 2002,Section1).Above we have focused on SL.In the more general case of RL in unknown environments,pcc(p,q) is also true if x p is an output event and x q any later input event—any action may affect the environment and thus any later perception.(In the real world,the environment may even influence non-input events computed on a physical hardware entangled with the entire universe,but this is ignored here.)It is possible to model and replace such unmodifiable environmental PCCs through a part of the NN that has already learned to predict(through some of its units)input events(including reward signals)from former input events and actions(Sec.6.1).Its weights are frozen,but can help to assign credit to other,still modifiable weights used to compute actions(Sec.6.1).This approach may lead to very deep CAPs though.Some DL research is about automatically rephrasing problems such that their depth is reduced(Sec.4). In particular,sometimes UL is used to make SL problems less deep,e.g.,Sec.5.10.Often Dynamic Programming(Sec.4.1)is used to facilitate certain traditional RL problems,e.g.,Sec.6.2.Sec.5focuses on CAPs for SL,Sec.6on the more complex case of RL.4Recurring Themes of Deep Learning4.1Dynamic Programming(DP)for DLOne recurring theme of DL is Dynamic Programming(DP)(Bellman,1957),which can help to facili-tate credit assignment under certain assumptions.For example,in SL NNs,backpropagation itself can 1An alternative would be to count only modifiable links when measuring depth.In many typical NN applications this would not make a difference,but in some it would,e.g.,Sec.6.1.be viewed as a DP-derived method(Sec.5.5).In traditional RL based on strong Markovian assumptions, DP-derived methods can help to greatly reduce problem depth(Sec.6.2).DP algorithms are also essen-tial for systems that combine concepts of NNs and graphical models,such as Hidden Markov Models (HMMs)(Stratonovich,1960;Baum and Petrie,1966)and Expectation Maximization(EM)(Dempster et al.,1977),e.g.,(Bottou,1991;Bengio,1991;Bourlard and Morgan,1994;Baldi and Chauvin,1996; Jordan and Sejnowski,2001;Bishop,2006;Poon and Domingos,2011;Dahl et al.,2012;Hinton et al., 2012a).4.2Unsupervised Learning(UL)Facilitating Supervised Learning(SL)and RL Another recurring theme is how UL can facilitate both SL(Sec.5)and RL(Sec.6).UL(Sec.5.6.4) is normally used to encode raw incoming data such as video or speech streams in a form that is more convenient for subsequent goal-directed learning.In particular,codes that describe the original data in a less redundant or more compact way can be fed into SL(Sec.5.10,5.15)or RL machines(Sec.6.4),whose search spaces may thus become smaller(and whose CAPs shallower)than those necessary for dealing with the raw data.UL is closely connected to the topics of regularization and compression(Sec.4.3,5.6.3). 4.3Occam’s Razor:Compression and Minimum Description Length(MDL) Occam’s razor favors simple solutions over complex ones.Given some programming language,the prin-ciple of Minimum Description Length(MDL)can be used to measure the complexity of a solution candi-date by the length of the shortest program that computes it(e.g.,Solomonoff,1964;Kolmogorov,1965b; Chaitin,1966;Wallace and Boulton,1968;Levin,1973a;Rissanen,1986;Blumer et al.,1987;Li and Vit´a nyi,1997;Gr¨u nwald et al.,2005).Some methods explicitly take into account program runtime(Al-lender,1992;Watanabe,1992;Schmidhuber,2002,1995);many consider only programs with constant runtime,written in non-universal programming languages(e.g.,Rissanen,1986;Hinton and van Camp, 1993).In the NN case,the MDL principle suggests that low NN weight complexity corresponds to high NN probability in the Bayesian view(e.g.,MacKay,1992;Buntine and Weigend,1991;De Freitas,2003), and to high generalization performance(e.g.,Baum and Haussler,1989),without overfitting the training data.Many methods have been proposed for regularizing NNs,that is,searching for solution-computing, low-complexity SL NNs(Sec.5.6.3)and RL NNs(Sec.6.7).This is closely related to certain UL methods (Sec.4.2,5.6.4).4.4Learning Hierarchical Representations Through Deep SL,UL,RLMany methods of Good Old-Fashioned Artificial Intelligence(GOFAI)(Nilsson,1980)as well as more recent approaches to AI(Russell et al.,1995)and Machine Learning(Mitchell,1997)learn hierarchies of more and more abstract data representations.For example,certain methods of syntactic pattern recog-nition(Fu,1977)such as grammar induction discover hierarchies of formal rules to model observations. The partially(un)supervised Automated Mathematician/EURISKO(Lenat,1983;Lenat and Brown,1984) continually learns concepts by combining previously learnt concepts.Such hierarchical representation learning(Ring,1994;Bengio et al.,2013;Deng and Yu,2014)is also a recurring theme of DL NNs for SL (Sec.5),UL-aided SL(Sec.5.7,5.10,5.15),and hierarchical RL(Sec.6.5).Often,abstract hierarchical representations are natural by-products of data compression(Sec.4.3),e.g.,Sec.5.10.4.5Fast Graphics Processing Units(GPUs)for DL in NNsWhile the previous millennium saw several attempts at creating fast NN-specific hardware(e.g.,Jackel et al.,1990;Faggin,1992;Ramacher et al.,1993;Widrow et al.,1994;Heemskerk,1995;Korkin et al., 1997;Urlbe,1999),and at exploiting standard hardware(e.g.,Anguita et al.,1994;Muller et al.,1995; Anguita and Gomes,1996),the new millennium brought a DL breakthrough in form of cheap,multi-processor graphics cards or GPUs.GPUs are widely used for video games,a huge and competitive market that has driven down hardware prices.GPUs excel at fast matrix and vector multiplications required not only for convincing virtual realities but also for NN training,where they can speed up learning by a factorof50and more.Some of the GPU-based FNN implementations(Sec.5.16-5.19)have greatly contributed to recent successes in contests for pattern recognition(Sec.5.19-5.22),image segmentation(Sec.5.21), and object detection(Sec.5.21-5.22).5Supervised NNs,Some Helped by Unsupervised NNsThe main focus of current practical applications is on Supervised Learning(SL),which has dominated re-cent pattern recognition contests(Sec.5.17-5.22).Several methods,however,use additional Unsupervised Learning(UL)to facilitate SL(Sec.5.7,5.10,5.15).It does make sense to treat SL and UL in the same section:often gradient-based methods,such as BP(Sec.5.5.1),are used to optimize objective functions of both UL and SL,and the boundary between SL and UL may blur,for example,when it comes to time series prediction and sequence classification,e.g.,Sec.5.10,5.12.A historical timeline format will help to arrange subsections on important inspirations and techni-cal contributions(although such a subsection may span a time interval of many years).Sec.5.1briefly mentions early,shallow NN models since the1940s,Sec.5.2additional early neurobiological inspiration relevant for modern Deep Learning(DL).Sec.5.3is about GMDH networks(since1965),perhaps thefirst (feedforward)DL systems.Sec.5.4is about the relatively deep Neocognitron NN(1979)which is similar to certain modern deep FNN architectures,as it combines convolutional NNs(CNNs),weight pattern repli-cation,and winner-take-all(WTA)mechanisms.Sec.5.5uses the notation of Sec.2to compactly describe a central algorithm of DL,namely,backpropagation(BP)for supervised weight-sharing FNNs and RNNs. It also summarizes the history of BP1960-1981and beyond.Sec.5.6describes problems encountered in the late1980s with BP for deep NNs,and mentions several ideas from the previous millennium to overcome them.Sec.5.7discusses afirst hierarchical stack of coupled UL-based Autoencoders(AEs)—this concept resurfaced in the new millennium(Sec.5.15).Sec.5.8is about applying BP to CNNs,which is important for today’s DL applications.Sec.5.9explains BP’s Fundamental DL Problem(of vanishing/exploding gradients)discovered in1991.Sec.5.10explains how a deep RNN stack of1991(the History Compressor) pre-trained by UL helped to solve previously unlearnable DL benchmarks requiring Credit Assignment Paths(CAPs,Sec.3)of depth1000and more.Sec.5.11discusses a particular WTA method called Max-Pooling(MP)important in today’s DL FNNs.Sec.5.12mentions afirst important contest won by SL NNs in1994.Sec.5.13describes a purely supervised DL RNN(Long Short-Term Memory,LSTM)for problems of depth1000and more.Sec.5.14mentions an early contest of2003won by an ensemble of shallow NNs, as well as good pattern recognition results with CNNs and LSTM RNNs(2003).Sec.5.15is mostly about Deep Belief Networks(DBNs,2006)and related stacks of Autoencoders(AEs,Sec.5.7)pre-trained by UL to facilitate BP-based SL.Sec.5.16mentions thefirst BP-trained MPCNNs(2007)and GPU-CNNs(2006). Sec.5.17-5.22focus on official competitions with secret test sets won by(mostly purely supervised)DL NNs since2009,in sequence recognition,image classification,image segmentation,and object detection. Many RNN results depended on LSTM(Sec.5.13);many FNN results depended on GPU-based FNN code developed since2004(Sec.5.16,5.17,5.18,5.19),in particular,GPU-MPCNNs(Sec.5.19).5.11940s and EarlierNN research started in the1940s(e.g.,McCulloch and Pitts,1943;Hebb,1949);compare also later work on learning NNs(Rosenblatt,1958,1962;Widrow and Hoff,1962;Grossberg,1969;Kohonen,1972; von der Malsburg,1973;Narendra and Thathatchar,1974;Willshaw and von der Malsburg,1976;Palm, 1980;Hopfield,1982).In a sense NNs have been around even longer,since early supervised NNs were essentially variants of linear regression methods going back at least to the early1800s(e.g.,Legendre, 1805;Gauss,1809,1821).Early NNs had a maximal CAP depth of1(Sec.3).5.2Around1960:More Neurobiological Inspiration for DLSimple cells and complex cells were found in the cat’s visual cortex(e.g.,Hubel and Wiesel,1962;Wiesel and Hubel,1959).These cellsfire in response to certain properties of visual sensory inputs,such as theorientation of plex cells exhibit more spatial invariance than simple cells.This inspired later deep NN architectures(Sec.5.4)used in certain modern award-winning Deep Learners(Sec.5.19-5.22).5.31965:Deep Networks Based on the Group Method of Data Handling(GMDH) Networks trained by the Group Method of Data Handling(GMDH)(Ivakhnenko and Lapa,1965; Ivakhnenko et al.,1967;Ivakhnenko,1968,1971)were perhaps thefirst DL systems of the Feedforward Multilayer Perceptron type.The units of GMDH nets may have polynomial activation functions imple-menting Kolmogorov-Gabor polynomials(more general than traditional NN activation functions).Given a training set,layers are incrementally grown and trained by regression analysis,then pruned with the help of a separate validation set(using today’s terminology),where Decision Regularisation is used to weed out superfluous units.The numbers of layers and units per layer can be learned in problem-dependent fashion. This is a good example of hierarchical representation learning(Sec.4.4).There have been numerous ap-plications of GMDH-style networks,e.g.(Ikeda et al.,1976;Farlow,1984;Madala and Ivakhnenko,1994; Ivakhnenko,1995;Kondo,1998;Kord´ık et al.,2003;Witczak et al.,2006;Kondo and Ueno,2008).5.41979:Convolution+Weight Replication+Winner-Take-All(WTA)Apart from deep GMDH networks(Sec.5.3),the Neocognitron(Fukushima,1979,1980,2013a)was per-haps thefirst artificial NN that deserved the attribute deep,and thefirst to incorporate the neurophysiolog-ical insights of Sec.5.2.It introduced convolutional NNs(today often called CNNs or convnets),where the(typically rectangular)receptivefield of a convolutional unit with given weight vector is shifted step by step across a2-dimensional array of input values,such as the pixels of an image.The resulting2D array of subsequent activation events of this unit can then provide inputs to higher-level units,and so on.Due to massive weight replication(Sec.2),relatively few parameters may be necessary to describe the behavior of such a convolutional layer.Competition layers have WTA subsets whose maximally active units are the only ones to adopt non-zero activation values.They essentially“down-sample”the competition layer’s input.This helps to create units whose responses are insensitive to small image shifts(compare Sec.5.2).The Neocognitron is very similar to the architecture of modern,contest-winning,purely super-vised,feedforward,gradient-based Deep Learners with alternating convolutional and competition lay-ers(e.g.,Sec.5.19-5.22).Fukushima,however,did not set the weights by supervised backpropagation (Sec.5.5,5.8),but by local un supervised learning rules(e.g.,Fukushima,2013b),or by pre-wiring.In that sense he did not care for the DL problem(Sec.5.9),although his architecture was comparatively deep indeed.He also used Spatial Averaging(Fukushima,1980,2011)instead of Max-Pooling(MP,Sec.5.11), currently a particularly convenient and popular WTA mechanism.Today’s CNN-based DL machines profita lot from later CNN work(e.g.,LeCun et al.,1989;Ranzato et al.,2007)(Sec.5.8,5.16,5.19).5.51960-1981and Beyond:Development of Backpropagation(BP)for NNsThe minimisation of errors through gradient descent(Hadamard,1908)in the parameter space of com-plex,nonlinear,differentiable,multi-stage,NN-related systems has been discussed at least since the early 1960s(e.g.,Kelley,1960;Bryson,1961;Bryson and Denham,1961;Pontryagin et al.,1961;Dreyfus,1962; Wilkinson,1965;Amari,1967;Bryson and Ho,1969;Director and Rohrer,1969;Griewank,2012),ini-tially within the framework of Euler-LaGrange equations in the Calculus of Variations(e.g.,Euler,1744). Steepest descent in such systems can be performed(Bryson,1961;Kelley,1960;Bryson and Ho,1969)by iterating the ancient chain rule(Leibniz,1676;L’Hˆo pital,1696)in Dynamic Programming(DP)style(Bell-man,1957).A simplified derivation of the method uses the chain rule only(Dreyfus,1962).The methods of the1960s were already efficient in the DP sense.However,they backpropagated derivative information through standard Jacobian matrix calculations from one“layer”to the previous one, explicitly addressing neither direct links across several layers nor potential additional efficiency gains due to network sparsity(but perhaps such enhancements seemed obvious to the authors).。
遗传算法在模拟电路故障诊断中的应用---优秀毕业论文参考文献可复制黏贴
In order to improve the speed of fault diagnosis, the application in soft fault diagnosis of analog circuits based on sensitivity analysis combined with the genetic algorithm is presented in this paper. We have discussed the sensitivity analysis of analog circuits. Estimate the offset of the component parameters to diagnose the fault of the analog circuits. We convert the diagnosis equation, which is constituted by the incremental test node voltage and the component parameters variation, into the linear programming problem about finding the smallest independent variable based on the hard constraints of the fault diagnosis equation. And the linear programming problem with constraints is converted to the extreme solution without constraints by the penalty function. The genetic algorithm is used to solve the optimal solution. Then, the influence of the control parameters of genetic algorithm is discussed with examples. A new Self-adaptive Genetic Algorithms was proposed and the experiments show that the method has a good efficiency on the soft fault diagnosis of tolerance analog circuits and has a higher speed.
文献综述-小波变换(Wavelet-Transform)的概念是1984年法国地球-...电子教案
文献综述小波变换(Wavelet Transform)的概念是1984年法国地球物理学家J.Morlet在分析处理地球物理勘探资料时提出来的。
小波变换的数学基础是19世纪的傅里叶变换,其后理论物理学家A.Grossman采用平移和伸缩不变性建立了小波变换的理论体系。
1985年,法国数学家Y.Meyer第一个构造出具有一定衰减性的光滑小波。
1988年,比利时数学家I.Daubechies证明了紧支撑正交标准小波基的存在性,使得离散小波分析成为可能。
1989年S.Mallat提出了多分辨率分析概念,统一了在此之前的各种构造小波的方法,特别是提出了二进小波变换的快速算法,使得小波变换完全走向了实用性。
小波分析是建立在泛函分析、Fourier分析、样条分析及调和分析基础上的新的分析处理工具。
它又被称为多分辨率分析,在时域和频域同时具有良好的局部化特性,常被誉为信号分析的“数据显微镜”。
近十多年来,小波分析的理论和方法在信号处理、语音分析、模式识别、数据压缩、图像处理、数字水印、量子物理等专业和领域得到广泛的应用。
小波变换分析在数据处理方面的应用主要集中在安全变形监测数据和GPS观测数据的处理,应为他们都对精度用较高的要求,而小波变换分析方法的优势能满足这个要求。
在安全变形数据处理主要集中在去噪处理、识别变形的突变点,也包括提取变形特征、分离不同变形频率、估计观测精度、小波变换最佳级数的确定等。
在GPS数据处理方面包括:利用小波分析法来检测GPS相位观测值整周跳变的理论与方法,GPS粗差检测、GPS信号多路径误差分析、相位周跳检测、基于小波的GPS双差残差分析等。
国内有关学者和研究人员研究工作如下:李宗春等研究了变形测量异常数据中小波变换最佳级数的确定,综合分析数据去噪效果的4 个分项评价指标,即数据的均方根差变化量、互相关系数、信噪比及平滑度,将各分项评价指标归化到[0, 1]后相加得到总体评价指标,将总体评价指标最大值所对应的级数定义为小波分解与重构的最佳级数。
中美韩合作研发出柔性人造触觉神经系统
行业动态News 6机器人技术与应用20184行业动态(新技术)5月21日,美国罗格斯大学航空航天工程系教授李镐元和韩国高丽大学机械工学部教授崔元准研究团队共同宣布,他们利用3D 打印技术,制造出智能水凝胶机器人,通过将该机器人置于水中,并对其施加电流,成功使其实现物体抓取和行走等动作。
据悉,智能凝胶相比于坚硬的固体材料成本较低,也据悉,美国麻省理工学院计算机科学与人工智能实验室(CSAIL)迪纳·卡塔比(Dina Katabi)教授的研究小组公布了一项最新研究成果,该成果来源于一个名为“RF-Pose”的项目,能通过AI 技术来训练无线设备,从而感知人们的姿势与动作,甚至在墙壁的另一侧都可以识别。
研究人员通过利用神经网络来分析从目标人物身体上反射回来的无线电信号,然后创建出动态抽象人形图。
当目标在做行走、停止、坐立或摆动四肢等动作时,这些人形图就会跟着做出相应的动作。
首先,研究人员利用无线设备与照相机收集了成千上万张人们在进行不同活动时的照片,比如:走路、说话、坐立、开门等。
其次,研究人员利用这些图像提取人形图像,并将其显示给神经网络和对应的无线电信号,以帮助该系统更好地了解无线电信号与所识别目标之间的联系。
然后,无线电信号通过人形图像来学习人体的姿态,通过反复训近日,天津南开大学电子信息与光学工程学院徐文涛团队与美国斯坦福大学、韩国首尔大学的研究人员合作研发出柔性人造触觉神经系统,该系统有望应用于机器人手术、假肢感触等领域。
据介绍,研究人员利用柔性有机材料模拟了人体SA-I 触觉神经,这种触觉神经由3个核心部件组成:电阻式压力传感器、有机环形振荡器、突触晶体管。
该系统首先利用一系列感受器感知极为细微的压力,并产生相应的电压变化,随后通过环形振荡器(人工神经纤维)将电压变化转变为电脉冲信号,而多个环形振荡器得到的电信号被突触晶体管集成并转变为突触电流,进而传递到下一级神经。
这种人造触觉神经能够很好地模拟人类皮肤的触觉功更容易进行设计和控制,主要用于制造软体机器人。
基于深度卷积-长短期记忆神经网络的整车道路载荷预测
拟路谱技术和基于机器学习的路谱识别技术。前者首 先通过激光扫描技术获取试验场路面不平度信号,然 后对包括轮胎、衬套悬置等弹性元件的整车模型进行 动力学仿真分析 ;后 [1-4] 者首先利用合适的机器学习模 型直接根据方便测量的整车参数预测道路载荷,然后 利用整车动力学仿真分析获取底盘结构件的动态响 应载荷 。 [5-8] 通过对比这 2 种方法,发现与虚拟路谱技术 相比,基于机器学习的路谱识别技术省去了操作复杂且 代价高昂的路面不平度测量工作,且不需要在整车动力 学模型中建立轮胎模型。
经 网 络(DCNN-LSTM)模 型 ,提 出 了 基 于 数 据 驱 动 的 整 车 轮 心 载 荷 预 测 方 法 。 对 比 试 验 结 果 表 明 ,该 方 法 预 测 的 整 车 轮 心
载荷与试验场采集数据非常接近,有利于逐步取消路谱采集试验并极大地提高整车耐久性分析的效率。
主题词:道路载荷 深度学习 数据库 疲劳耐久分析 深度卷积神经网络 长短期记忆
每小块求取统计值(如均值或最大值)即可得到池化层 的输出信息。在整车道路载荷预测中,需要处理的汽车
算和求和运算,然后通过非线性转换获得卷积层的输出 信息。在池化层,输入的数据被分为很多小块,通过对
运行参数属于一维时序数据,因此 DCNN 层选用如图 2 所示的一维卷积神经网络层。
x(1) x(2)
x(S - 1) x(S)
1 前言
在现有的汽车底盘结构疲劳耐久分析流程中,为了 获得整车的道路载荷谱,通常需要在项目开发早期开展 整车道路耐久试验,该试验需要特制的试制样车、测量 设备、试验场所以及数周的试验时间。随着控制成本和 缩减开发周期的要求日益严格,道路试验成本高、周期 长的问题更加突出,亟待解决。