光电计数器的设计
基于单片机的光电计数器设计毕业设计

毕业设计(论文)题目:基于单片机的光电计数器设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
光电计数器设计报告
前言随着大规模、自动化的生产不断发展,很多企业在生产的过程中,大量使用各种智能化的产品,提高生产管理水平;采用红外线遮光方式的光电计数器,抗干扰性好,可靠性高;可用于测量宾馆、饭店、商场、超市、博物馆、展览馆、车站、码头、银行等场所的人员数量及人员流通数量,同时丝毫不会侵犯到被测人员的个人隐私;该产品应用广泛,也可以测量流水线上的产品的数量,以及可检查产品有无缺损;适用于各种环境对产品的成品或者是半成品进行计数,以满足现代生产的适时管理和需要,实现了智能控制;本人根据了光电计数器的工作原理,再结合了刚学过的模拟电子技术、数字电子技术、光电传感技术等电子类专业知识,制作了一个简易的红外光电计数器,本课题设计是对自己所学知识的一个综合运用和检验;同时也是自己走向社会前对产品的制作工艺以及产品生产流程的了解;该电路的指导思想是利用红外发光管发射红外线,红外接收管接收此红外线,并将其放大、整流转换成高低电平信号,驱动计数器计数,并经译码驱动电路使数码管显示数值;该电路还设计了一个报警电路,当计数器计数到上限时即99时,产生一个进位脉冲来驱动555产生延时信号使蜂鸣器报警;由于本人经验不足,且实验器材精确度不高,故设计还有很多不足和缺陷,需做进一步的改进和完善;第一章设计内容及要求1.设计主要内容该设计以红外发射及接收管为主要元器件产生光电脉冲,该脉冲通过双十进制加法计数器计数,4-8译码器译码,7段数码显示管显示来实现系统0-99光电计数及显示;当计数到99时计数暂停并报警;启动清零开关可重新计数;2.设计要求设计主要包含基本和提高要求两层次基本要求:利用红外发射接收管作为光电计数器的传感器进行计数,用数码管显示计数值,当数码管显示值与设定值相同时报警,此外计数器停止计数,手动清除报警后可重新工作;提高要求:l发光器件和光接收器之间的距离大于lM提示:生于距离较远;需要增大发光二极管的电流,这种情况下只能采用脉冲供电方法,此时有物体和无物体其输出频率会产生变化;2有抗干扰技术,防止背景光和瓶子抖动产生计数误差3每计数100,用灯闪烁2S指示一下;第二章系统设计方案选择方案一图方案一电路原理设计图该电路采用遮光式红外管触发计数器计数,当计数器递增计时到99即定时时间到时,显示器上显示99,同时发出光电报警信号;译码显示电路由74LS48和共阴极七段LED显示器以及1K电阻排组成;报警电路主要由555定时器脉冲控制;秒脉冲发生器产生的信号是电路的时钟脉冲和定时标准,但本设计对此信号要求并不是太高;主要是利用555产生一个延时信号使蜂鸣器扬声报警,此时可按下复位开关是电路重新从00开始计数;方案二图方案二电路原理设计图方案比较1.光电转换部分方案一设计简单,原理清晰,对负载及红外信号的发射强度未予考虑;方案二红外接收管的负载能力得以提高,但实现光电脉冲对电阻及三极管的开关参数有一定的要求,红外接收管还会受到三极管作用下的外围负载影响,不易于实现标准的高低电平转化;2.计数显示部分由于两种方案在计数部分所用的芯片不同,因此在芯片的个数选择和各引角连接方面就存在明显的差异;其一74LS192多了清零端方便清零功能的实现;74LS190就需在置数端实现置数功能基础上做点改进,这里通过一双向开关实现硬件复位;其二是进制设置:74LS192采用的是S9=1001,74LS190采用的是S10=1010;都需要使用与非门实现置数,但是74LS192是同步置数,74LS190是异步置数,74LS192当一有进位信号时就开始置数,而74LS190置数信号有延迟;这是两者最主要的区别,也是方案设计选择前者的主要原因;3.译码部分都采用4输入8输出译码方式,实现功能相同,两者没有明显的优劣差异;4.显示部分都采用共阴极七断数码驱动显示管,此部分没有区别;5.报警设置若实现99报时,方案一设计更简单,直接从CO端引出报警信号,通过555定时器产生一定频率的脉冲驱动报警电路;方案二报警设计具有通用性,能设置0-99范围内任意数值显示时的报警,但设置报警数值时较为不便;考虑实际应用采用方案一;总上所述,方案一更简易、经济,更可行;图系统原理组成框图工作原理该计数器采用了遮光式红外发射与接收管来产生脉冲信号,当没有遮光物时,红外接收管产生低电平信号,再经过三极管信号放大反向后变为高电平信号,最后经过74LS14反向器又变为低电平,同理,当有遮光物挡住对管时,接收管产生高电平信号,在经过放大反向后,作用在74LS192计数器上一个高电平信号,这样就有一个正跳沿脉冲使计数器开始进行加计数,并且通过74LS48译码电路在两个共阴极数码管上显示计数值,计数部分采用了同步时序逻辑电路设计,当计数器递增计数到99即计数最大值时,两计数器开始同步置数,同时高位计数器产生进位脉冲信号驱动报警电路报警,报警电路采用的是NE555构成的多谐振荡器,振荡频率 f0=1/R1+2R2CLn2=R1+2R2C,其输出信号经三极管推动蜂鸣器工作;PR未控制信号,当PR为高电平时,多谐振荡器工作;反之,电路停振;此时可以用复位开关使其清零,当再有脉冲信号时,计数器又开始循环计数;第四章单元电路设计、参数计算、器件选择光电转换模块光电转换的电路见图由于发光二极管的工作电压大约在左右,工作电流大约在4mA到10mA左右,并且电源电压为5V,所以R3=/4mA~10mA=250Ω~625Ω,因此选择470的电阻作为发光管的限流电阻;三极管有放大作用,所以集电极的电流较大,所以要加一个阻值较大的电阻作为限流电阻,因此选择了10KΩ电阻;当接通电源的时候,红外发射管发光,红外接收管反向导通,相当于短路,所以A点的电压为低电平,基极电流降低,发射结的电压降低,所以发射结反向截止,根据三极管基极电压与集电极电压反向的特性,所以集电极电压为高电平,当一旦有东西遮在发光管和光敏三极管中间时,红外接收管正向截止,即A点电位为高电平,当之超过三极管的导通电压一般为硅管为,锗管为左右时,三极管就会导通,当基极电流继续增加时,三极管会饱和导通,此时三极管相当于工作在开关的闭合状态,发射极相当于直接接地,所以集电极输出为低电平;再经过一个反向器后变为高电平,这样就可以给后面计数器一个上升沿脉冲;使其触发开始工作;图光电转换电路计数显示模块4.2.1 数码管译码:编码的逆过程,即将输入代码“翻译”成特定的输出信号;译码器:实现译码功能的数字电路;七段数字显示器原理按内部连接数字显示器分为共阴极和共阳极两种(a)管脚排列图; b共阴极接线图; c 共阳级接线图图数码管内部电路4.2.2 显示译码器74LS48图 74LS48的管脚排列图和其逻辑符号图4.3 A 0 =0时,/ LT =1时,若七段均完好,显示字形是“8”,该输入端常用于检查74LS48显示器的好坏; 当 A 1=1时,译码器方可进行译码显示; 用来动态灭零,当A 2= 1时, 且A 3 =0, 输入A3A2A1A0=0000时,则/ I BR =0使数字符的各段熄灭; / LT为灭灯输入/灭灯输出,当 V CC =0时不管输入如何, 数码管不显示数字; 为控制低位灭零信号,当A 3=1时, 说明本位处于显示状态;若 A 3 =0, 且低位为零, 则低位零被熄灭;图 译码显示电路 根据设计要求由于数码管是由发光二极管构成的,所以要在译码器与数码管之间加1K 的电阻保护,因为选择的是共阴的数码管,数码管的两个公共端与地端相接;4.2.3 十进制计数器74LS19274LS192是双时钟方式的十进制可逆计数器; CPU 为加计数时钟输入端,CPD 为减计数时钟输入端;LD 为预置输入控制端,异步预置;CR 为复位输入端,高电平有效,异步清除;CO 为进位输出:1001状态后负脉冲输出, BO 为借位输出:0000状态后负脉冲输出;图 a74ls192引脚图 b74LS192逻辑符号图表 74LS192的真值表工作原理:当LD =1,CR=0时,若时钟脉冲加入到U CP 端,且D CP =1,则计数器在预置数的基础上完成加计数功能,当加计数到9时,CO 端发出进位下跳脉冲;若时钟脉冲加入到D CP 端,且U CP =1,则计数器在预置数的基础上完成减计数功能,当减计数到0时,BO 端发出借位下跳变脉冲;由74LS192组成的一百进制递加计数器如下图,其预置数为N=1001 10018421BCD=99;它的计数原理是:只有当低位CO 端发出进位脉冲时,高位计数器才作加计数;当高、低位计数器处于99,且置数端LD =0,计数器完成并行置数,此计数器的置数值为99,当置数到99时可用复位端使其清零,在U CP 端的输入时钟脉冲作用下,计数器再次进入下一循环加计数;图 计数器计数置位部分声光报警模块由555定时器和三极管构成的报警电路如图所示;其中,555构成多谐振荡器,振荡频率 f0=1/R1+2R2CLn2=R1+2R2C,其输出信号经三极管推动扬声器;PR 未控制信号,当PR 为高电平时,多谐振荡器工作;反之,电路停振;图 报警工作电路555电路的工作原理555电路的内部电路方框图如图所示;它含有两个电压比较器,一个基本RS 触发器,一个放电开关管T,比较器的参考电压由三只 5K Ω的电阻器构成的分压器提供;它们分别使高电平比较器A 1 的同相输入端和低电平比较器A 2的反相输入端的参考电平为CC V 32和CC V 31;A 1与A 2的输出端控制RS 触发器状态和放电管开关状态;当输入信号自6脚,即高电平触发输入并超过参考电平CC V 32时,触发器复位,555的输出端3脚输出低电平,同时放电开关管导通;当输入信号自2脚输入并低于CC V 31时,触发器置位,555的3脚输出高电平,同时放电开关管截止;D R 是复位端4脚,当D R =0,555输出低电平;平时D R 端开路或接V CC ,V C 是控制电压端5脚,平时输出CC V 32作为比较器A 1 的参考电平,当5脚外接一个输入电压,即改变了比较器的参考电平,从而实现对输出的另一种控制,在不接外加电压时,通常接一个μf 的电容器到地,起滤波作用,以消除外来的干扰,以确保参考电平的稳定;T 为放电管,当T 导通时,将给接于脚7的电容器提供低阻放电通路;图 555电路的内部电路方框图本电路由555定时器和外接元件R 1、R 2、C 构成多谐振荡器,脚2与脚6直接相连;电路没有稳态,仅存在两个暂稳态,电路亦不需要外加触发信号,利用电源通过R 1、R 2向C 充电,以及C 通过R 2向放电端 C t 放电,使电路产生振荡;电容C 在CC V 31和CC V 32之间充电和放电,其波形如图b 所示;输出信号的时间参数是T =t w1+t w2, t w1=R 1+R 2C, t w2=2C 555电路要求R 1 与R 2 均应大于或等于1K Ω ,但R 1+R 2应小于或等于Ω;图 多谐振荡器结构及工作电压波形第五章 实验、调试及测试结果与分析·调试电路板焊接好后,先不能急着通电,先要检查硬件线路,其步骤如下:1检查连线是否正确根据电路原理图连线,按一定顺序一一检查安装好线路,这样可以比较容易查出错线或少线;为了防止出错,对于已查过的线路在电路图上做出标记 ;2元器件的安装情况检查元器件引脚之间有无短路;连接处有无接触不良,有无虚焊,假焊情况;二极管的极性和集成元件的引脚是否连接有误;这样检查无误后就开始通电,通电后发现十位数码管中e 极二极管不亮,找出其连接译码器的15脚,发现是虚焊了,重新焊了下,通上电数码管正常工作;当我们把遮光物放在对管再抽出的过程中,数码管没变化,还是显示00,通过用数字万用表检测后,发现红外接收管内阻很大,已经烧坏了,可能是在焊接的过程中,温度过高散热不当所致,后又换了个红外接收管;当再次通电后,在用同样的方法发现数码管还是不计数,我们用万用表检查了以下,发现当没有遮住红外管时,红外接收管的电压为本应该在左右,当遮住了红外管后,电压变为,总结下低电平电压过高,不能使反向器反向,也就不能使计数器计数,我们把红外管对折后重新焊接,在通上电,这次把电源电压改小了,改为原来是,结果板子正常工作了,能实现00-99计数了,而且比较稳定;结果与分析通过调试以后,电路板可以按照预定的要求实现功能;刚开始通电,数码管显示00,当有遮光物挡住又拔出时,计数器进行加1,这样能完成00—99计数,通过检测我们发现红外管需要对折焊接后才会更加灵敏,这样才能使脉冲信号更加稳定,计数更准确,还有板子的工作电压要调好,不能过高也不能太低,要让板子能正常工作即可,在焊接时一定注意温度控制好,可以先把一些敏感元件引脚留长些,这样可以方便散热,以免烧坏元件;总结为期一周的电子课题设计终于落下帷幕了,我和我的搭档经过这一周的辛苦努力,终于得到了收获,完成了我们的电子设计---光电计数器;因为以前动手很少,对做电子线路板经验不足,所以刚开始有点不知所措,但我们没有放弃这次难得的动手机会,通过查阅相关资料,把原理图画好,经过仿真确定其可行性,然后就开始焊接电路板,在焊接电路板的过程中,我们从中发现了许多问题,也遇到了不少难题,不过我们没有退却,在指导老师的帮助下,把问题给逐一解决了,而且在动手操作的过程中,也领悟到了许多焊接技巧,方法,增强了实践动手能力,当我和搭档把电路板成功焊接完成后,非常兴奋,很有成就感,更增加了我们以后动手操作的信心,在后期调试过程中,通过数字万用表,示波器等相关测量工具获得了计数器的一些工作参数,在结合实验现象和结果分析,更加懂得了该光电计数器的工作原理;感谢学校给我们提供了这次宝贵的动手实践机会,通过动手操作,我们学到了许多书本上没有的知识,而且更加巩固了所学知识,真正做到了所学即所用;经过这次电子设计,我从中收获了很多,更加懂得了理论联系实际的重要性,让我们对电子设计这门科目有了更深一层次的了解;我相信我能在以后的电子设计中做的更好,会有更多新的发现;参考文献1 梁宗善. 电子技术基础与课程设计.华东理工大学出版社. 1994.2 郁汉琪. 数字电子技术实验及课题设计.高等教育出版社.3 梁廷贵、王裕琛.译码器编码器数据选择器电子开关电源分册.科学技术文献出版社.4 杨志忠、卫桦林. 数字电子技术. 高等教育出版社.5 杜虎林.数字万用表使用测量技法与故障检修.人民邮电出版社.6 吴运昌.模拟集成电路原理与应用.华南理工大学出版社.7 黄智伟. 全国大学生电子设计竞赛技能训练.北京航空航天大学出版社.8 刘守义.数字电子技术基础.清华大学出版社.附录1电路原理总图附录2电路元器清单。
光电计数器的设计..

课程设计说明书课程设计名称:数字电子技术基础课程设计题目:学院名称:专业:班级:学号:姓名:评分:教师:20 年月数字电路课程设计任务书13 - 14 学年第 1学期第 2 周- 3 周题目光电计数器的设计内容及要求〖基本要求〗利用发光二极管和光敏三极管作为光电计数器的传感器进行计数,用数码管显示计数值,当数码管显示值与设定值相同时报警,此外计数器停止计数,手动清除报警后可重新工作。
〖提高要求〗l)发光器件和光接收器之间的距离大于lM(提示:若距离较远可增大发光二极管的电流,这种情况下只能采用脉冲供电方法,此时有物体和无物体其输出频率会产生变化2)有抗干扰技术,防止背景光和瓶子抖动产生计数误差3每计数100,用灯闪烁2S指示一下进度安排1. 仿真、画PCB线路板图、领元器件:2天2. 制作、焊接:2天3.调试:3天3. 验收:1天4. 提交报告:13-14学年第一学期3~7周学生姓名:指导时间:第2~3周指导地点:任务下达 13年 9 月 7 日任务完成年月日考核方式 1.评阅□√ 2.答辩□√ 3.实际操作□√ 4.其它□指导教师系(部)主任注:1、此表一组一表二份,课程设计小组组长一份;任课教师授课时自带一份备查。
2、课程设计结束后与“课程设计小结”、“学生成绩单”一并交院教务存档。
摘要光电计数器的设计可对物件计数,计数物件速度可慢、可快,它在生产流水线包装数量控制等领域广泛应用,既节省劳动力又高效地完成任务。
设计采用模数结合电路。
电路主要分为信号采集电路、两位十进制计数电路、数码显示电路、报警电路四个模块,分别实现对通过光电门的物体感应,计数,显示,报警。
当计数达到预设数目后,停止计数并报警,可手动清除报警。
关键词:计数感应报警目录前言 (1)第一章设计要求 (2)1.1 基本要求 (2)1.2 提高要求 (2)第二章系统组成及方案设计 (3)2.1 系统组成 (3)2.1 方案一 (3)2.2 方案二 (4)2.3 方案比较与选择 (4)第三章单元电路的工作原理 (5)3.1 光电转换电路 (5)3.2 计数电路 (5)3.3 报警电路 (7)3.4 电路仿真 (9)第四章组装、调试及测试结果与分析 (10)4.1 焊接是特别要注意的几点: (10)4.2 调试与测试结果 (10)4.2.1 调试的步骤 (10)4.2.2 调试中的问题 (10)4.2.3 结果 (11)第五章总结 (12)参考文献 (13)附录一元件清单 (14)附录二总电路图 (15)附录三方案一原理图 (16)附录三电路仿真图 (17)前言21世纪是信息时代,是获取信息,处理信息,运用信息的时代。
光电计数器的设计与制作
光电池在人造卫星上的应用
光电式传感器的组成:
常用光源有:
光源、光学元件和光电元件组成光路系统,再经转换电路而构成。
白炽灯、发光二极管等
光电式传感器应用
常用光学元件有:
反射镜、透镜、半透半反镜等
提问:1. 光电效应有哪些?这些光电效应对
应哪些光电元件?
这些光电元件有哪些特点?分别适
红外线辐射温度计在非接触温度测量中的应用(续) 利用红色激光瞄准被测物(电控柜、天花板内的布线层) 温度 采集系统
2.热释电传感器在人体检测、报警中的应用 热释电元件在红外线检测中得到广泛的应用。它可用于能产生远红外辐射的人体检测,如防盗门、宾馆大厅自动门、自动灯的控制等。 热释电元件外形
能力目标:能够选用光电传感器来设计 并实现光电自动控制电路 实践任务:1)光电传感器的选型 2)设计光电自动控制功能的电路 3)制作光电自动控制功能的电路
广东机电职业技术学院------传感器及应用
项目七:光电计数器的设计与制作
被测物
光电元件
恒光源
3、恒定光源发出的光通量经过被测物遮挡一部 分后照射到光电元件上。 如:测元件尺寸、运动状态等
被测物
光电元件
恒光源
4、恒定光源发出的光通量经被测物反射后到达 光电元件上。 如:测纸张白度、零件表面粗糙度、光电转速 表等
01
常用的红外发光二极管(如SE303(TLN104白色与PH303(TLP104),其外形和发光二极管LED相似,发出红外光(近红外线约0.93μm )。
02
管压降约1.4V ,工作电流一般小于20mA。为了适应不同的工作电压,回路中常串有限流电阻。发射红外线去控制相应的受控装置时,其控制的距离与发射功率成正比。
光电计数器设计论文 基于单片机的工业产品自动计数器
光电计数器设计论文基于单片机的工业产品自动计数器系统调试光电计数器设计论文一,设计题目:基于单片机的工业产品自动计数器二,设计要求:1,数码管可以显示产品个数(0-99),自由设定产品报警个数(比如 8),当产品数目是8的个数时,发出报警(蜂鸣器响)。
2,独立设计电路,应包括单片机小系统、红外光电开关、数码管显示部分。
三,题目分析:一电路光控电路,放置在流水线旁。
当有产品通本电路的指导思想是设计过光电门时,都会先触发光控电路,根据光控电路产生触发脉冲令计数器进行加计数,要求计数器的最大计数容量是99个,并用数码管显示数字。
并在计数每次达到10时报警。
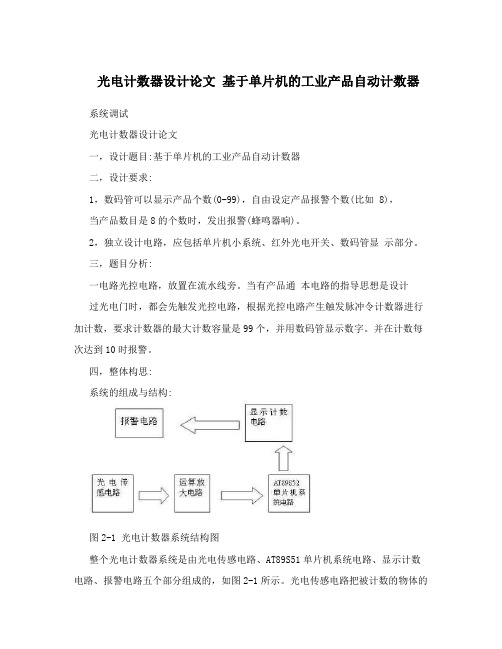
四,整体构思:系统的组成与结构:图2-1 光电计数器系统结构图整个光电计数器系统是由光电传感电路、AT89S51单片机系统电路、显示计数电路、报警电路五个部分组成的,如图2-1所示。
光电传感电路把被计数的物体的变化转换成电信号,由显示计数电路计数,再由数码显示管显示,当达到设定的报警值时,报警电路发出报警。
五,具体实现:1,光电开关:采用光电传感器采集外部信号。
引起单片机内部中断发生。
2,中断方式计数:由于光电技术电路需要在数码管上显示通过光电门的产品数量,因系统调试此可以在内部存储器空间定义它的显示缓存区,用来暂存数码管显示的当前值。
系统在初始化程序之中,设置外部中断0产生中断标志T0,并初始化值为0。
当有外部中产生时,相应的中断置1。
当外部中断0产生中断时,在主程序中扫描T0是否为1。
当T0为1时,调用光电计数子程序,将显示暂存变量加1,。
每当通过光电门的产品数量达到12时,蜂鸣器响一声,并清零缓存,继续计数。
3,显示部分:该系统要求显示计数功能。
基于上述原因,我们考虑了三种方案: 方案一:完全采用 LCD显示。
完全采用 LCD显示可显示有限的符号和数码字苻,能满足设计的需要。
方案二:完全采用点阵式 LCD显示。
这种方案实现复杂,且须完成大量的软件工作;但功能强大,可方便的显示各种英文字符,汉字,图形等,也可满足设计的需要。
电气电子毕业设计16传感器课程设计(报告):光电计数器
引言传感器是一种敏感器件,它能将被测物理量转换成便于测量和处理的另一种物理量。
例如,光、声、磁、温度、压力等非电量通过传感器可转换成电压或电流,从而采用电子设备对其进行控制、测量和处理。
传感器主要用于测量和控制系统,它的性能好坏直接影响系统的性能。
在自动测量过程或控制系统中,首先由传感器感受被测量,而后把它转换成电信号,供显示仪表指示或用以控制执行机构。
如果传感器不能灵敏地感受被测量,或者不能把感受到的被测量精确地转换成电信号,其他仪表和装置的精确度再高也无意义。
传感器应用广泛,种类很多。
其中光电传感器作为一种新型的电压电流测量装置,与传统电磁式互感器相比较,具有绝缘强度高、动态范围大、频带宽、抗干扰能力强、不会产生磁饱和及铁磁谐振、体积小、重量轻、造价低等一系列优点。
本论文主要阐述了利用光电断路器做为敏感元件,将光转换为电信号输出,并用数码管显示,实现光电计数器的功能的过程。
对该电路的工作原理、制作和调试方法等做了深入介绍。
光电计数器在本论文设计中,主要是由光电信号检出、放大、整形、计数和显示5个部分电路构成。
光电断路器、三极管VT1、VT2组成的电路是为了检测输出光电脉冲。
集成计数器A1、A2以及数码管LED等构成的计数电路是为了脉冲信号进行计数。
因此,也可以说该电路是由这两部分电路组成。
本计数器可将机械或人工计数方式变为电子计数,并且采用LED数码显示,简单直观,可适用于诸多行业,以满足现代生产、生活等方面的需求。
本篇论证仔细、全面、深入,通俗易懂,实用性强,本报告所用词汇仔细洗练,都是一些简单易懂的词,读者可以容易了解电路的相关性能。
附录还对整个电路设计中很多问题给予相应的解释和扩展,相信适合多层次电子相关专业人士参阅和参加各种电子竞赛活动的参考资料。
1 主要器件介绍1.1 光电断路器光电断路器是光耦合器中的一种。
光电断路器以光为媒介传输电信号。
它对输入、输出电信号有良好的隔离作用,所以,它在各种电路中得到广泛的应用。
毕业论文光电计数器设计及制作
毕业论文光电计数器设计及制作光电计数器是一种常见的数字传感器,可以通过光电元件对光强度进行测量,并将得到的信号转换成数字信号进行计数。
本文将介绍光电计数器的设计和制作过程。
一、原理介绍光电计数器的基本原理是利用光敏元件(比如光敏二极管)和计数器芯片(比如74LS76)实现对光强的测量和数字计数。
具体流程如下:1. 光敏元件接收光信号,将光信号转化为电信号。
这里我们使用光敏二极管,通过照射它来产生电流(或电压)信号。
2. 信号放大。
由于光敏二极管产生的电流信号非常微弱,需要经过一个放大器进行放大,通过构建像素放大器来对信号进行放大。
3. 信号滤波处理。
由于光信号中包含噪声,在进行信号测量之前需要对信号进行滤波处理,通常可以采用低通滤波器来消除高频噪声。
4. 数字计数。
将上述处理之后的信号输入74LS76芯片进行数字计数,可以实现对光信号的计数。
其中,74LS76是一款可同步74LS系列预置式双稳态计数器,包含两个独立恒压源的JK触发器。
二、设计过程1. 光敏元件的选择。
在本设计中,我们选择了光敏二极管作为光敏元件,其灵敏度较高,响应速度较快,此外成本也相对较低。
需要注意选择合适的工作波长(根据不同应用场景的光源波长进行选择)。
2. 像素放大器的设计。
为了放大光敏二极管产生的微弱信号,我们需要构建一个像素放大器。
放大器的主要部件包括一个放大电路和一个反馈电路。
电路设计采用了双运算放大器,具备高增益、高输入阻抗和低噪声等特点。
反馈电路采用了电压跟随器结构,能够实现电压放大,同时对电压进行平滑处理,起到滤波作用。
3. 滤波器设计。
为了消除光信号中的高频噪声,我们采用了一级低通滤波器。
该低通滤波器采用R-C串联结构,通过改变电容的大小可以调节滤波器的截止频率。
4. 计数器的选择。
在本设计中,我们选择了74LS76芯片作为计数器。
这款芯片具有高速、低功耗、低成本的特点,可以满足光电计数器的计数要求。
三、制作过程1. 光电元件的连接。
光电计数器课程设计
目录1绪论 (1)1.1 设计背景 (1)1.2 设计任务与要求 (1)2 相关原理分析 (2)2.1 单片机原理 (2)2.2 555定时器原理 (2)上拉电阻原理 (3)3 系统总体方案的设计 (4)4 系统详细设计 (4)4.1 晶振电路设计 (4)电源电路设计 (5)4.3 复位电路设计 (5)4.4 光电管电路设计 (6)显示电路设计 (6)5 系统测试 (7)5.1 主要元器件 (7)5.2 焊接元器件 (7)5.3 系统测试考前须知 (8)5.4 程序设计 (8)6 收获与体会 (10)参考文献 (10)附录一总体电路图 (11)附录二元器件清单 (12)光电计数器1绪论1.1设计背景数字式电子计数器有直观和计数精确的优点,目前已在各种行业中普遍使用。
数字式电子计数器有多种计数触发方式,它是由实际使用条件和环境决定的。
有采用机械方式的接触式触发的,有采用电子传感器的非接触式触发的,光电式传感器是其中之一,它是一种非接触式电子传感器。
这种计数器在工厂的生产流水线上作产品统计,有着其他计数器不可取代的优点。
该例光电触发式电子计数器只有两位数,但通过级联可以扩展为四位,甚至多位。
光电计数器是通过红外线发射和接收进行计数,有直射式和反射式两种,通常用于流水线作业工件计数。
直射式的发射、接收分体,发生器和接收器分别置于流水线两边,中间没有阻挡时发射器的红外线射到接收器,接收器收到发射来的红外线,经相反处理使之没有信号输出,有工件经过时挡住光路,接收机失去红外线信号的便输出一个脉冲信号到运算累加器进行计数。
发射式是发射、接收同体,置流水线一边,前面没有工件往下流时,发射器发出的红外线直接射出没有发射,接收器没有接收到反射来的红外线信号没有输出。
有工件经过时挡住光电路使发射器发出的红外线信号发射到接收器上,接收器接收到反射来的红外线信号便输出一个脉冲信号到运算累加器进行计数。
1.2设计任务与要求设计并制作一个单片机控制的光电计数器,使其满足以下要求:〔1〕上电显示初始值0000,计数上限为10000。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
总结与展望光电计数器的设计摘要本系统采用的是以单片机STC89c52为核心的自动计数器。
采用反射式光电传感器,将红外发光管与光电接收管相邻安放,每当物体通过一次,红外光就被物体反射,光电接收管接收一次,光电接收管的输出电压就发生一次变化,这个变化的电压信号通过放大和处理后,形成计数脉冲,通过光电隔离耦合并行输入至STC89c52单片机的P1口,通过软件控制和键盘设定计数值并用LED加以显示,便可实现对物体的计数统计。
本计数器可将机械或人工计数方式变为电子计数,并且采用LED数码管显示,可适用于诸多行业,以满足现代生产、生活方式的需求。
所谓的光电式传感器是将光信号转化为电信号的一种传感器。
它的理论基础是光电效应。
这类效应大致可分为三类。
第一类是外光电效应,即在光照射下,能使电子逸出物体表面。
利用这种效应所做成的器件有真空光电管、光电倍增管等。
第二类是内光电效应,即在光线照射下,能使物质的电阻率改变。
这类器件包括各类半导体光敏电阻。
第三类是光生伏特效应,即在光线作用下,物体内产生电动势的现象,此电动势称为光生电动势。
这类器件包括光电池、光电晶体管等。
光电效应都是利用光电元件受光照后,电特性发生变化。
敏感的光波长是在可见光附近,包括红外波长和紫外波长。
市场上的光电计数器采用的光电传感器有摄像头、光电管等,采用的光的种类有普通光和激光,可见光和不可见光等。
光电传感器一般由光源、光学通路和光电元件三部分组成。
光电式传感器是以光电器件作为转换元件的传感器,光电检测方法具有精度高、应用快、非接触等优点,而可测参数多,光电传感器的结构简单,形式灵活多变因此,光电式传感器在检测和控制中应用非常广泛。
【关键词】计数器光电传感器单片机数码管调研报告1.1当今生活是信息时代,是获取信息和处理信息,以及信息应用的时代.传感信息与检测技术的重要性在于它是获得信息并对信息进行一定处理的基础技术,是获取信息和信息加工处理的重要手段之一。
传感与检测技术是一门知识面广、综合程度高、实用性很强的专业课程。
它从传感器的基本理论入手,着重讲叙传感器的结构与感测原理,传感器是一个二端口的装置,不同的传感器输入-输出特性不同,同一传感器适应不同的被测信号呈现的特性也有所不同。
尤其当被测信号为静态信号时两种状态下,传感器的输入-输出特性完全不同。
感测技术在许多新知识里都有应用,以信息的传感、转换、处理为核心,从基本物理概念入手,阐述热工量、机械量、几何量等参数的测量原理及方法。
光电式传感器是将光信号转化为电信号的一种传感器。
它的理论基础是光电效应。
这类效应大致可分为三类。
第一类是外光电效应,即在光照射下,能使电子逸出物体表面。
利用这种效应所做成的器件有真空光电管、光电倍增管等。
第二类是内光电效应,即在光线照射下,能使物质的电阻率改变。
这类器件包括各类半导体光敏电阻。
第三类是光生伏特效应,即在光线作用下,物体内产生电动势的现象,此电动势称为光生电动势。
这类器件包括光电池、光电晶体管等。
光电效应都是利用光电元件受光照后,电特性发生变化。
敏感的光波长是在可见光附近,包括红外波长和紫外波长。
数字式电子计数器有直观和计数精确的优点,目前已在各种行业中普遍使用。
数字式电子计数器有多种计数触发方式,它是由实际使用条件和环境决定的。
有采用机械方式的接触式触发的,有采用电子传感器的非接触式触发的,光电式传感器是其中之一,它是一种非接触式电子传感器。
采用光电传感器制作的光电式电子计数器。
这种计数器在工厂的生产流水线上作产品统计,有着其他计数器不可取代的优点。
该例光电触发式电子计数器只有两位数,但通过级联可以扩展为四位,甚至多位。
1.2光电计数的现状及发展前景随着科学技术的发展,电子计数器的辅助功能也逐渐增加,现在已经出现了多功能计数器,多功能计数器产品的响应度较高,交直、流电两用、耗能低、价格低、无机械碰撞、无磨损、使用寿命长,既可计数,又可计算。
例如在毛衣编织机上运用,除可计数和计算外,还可实现断线报警。
通用计数器不仅可测频率、周期还可以测多周期平均、时间间隔、频率比和累计等。
频率计数器专门用总结与展望于测量高频和微波频率的计数器。
微波计数器是以通用计数器和频率计数器为主配以测频扩展器而组成的微波频率计。
它的测频上限已进入毫米波段,有手动半自动、全自动3类。
系列化微波计数器是电子计数器发展的一个重要方面。
由于有光电计数的设计理念,因此有了光电计数的发展。
在市场电子计数器行业需求增长有所减缓的现状下,产能扩张的势头并没有得到较好的控制。
产能过剩、重复建设不仅导致生产与消费的失衡,而且还引发了电子计数器行业内的一系列恶性价格竞争,影响了电子计数器行业业的盈利能力。
中国电子计数器行业市场现状,为外资企业入驻中国创造了条件,国际许多电子计数器行业企业已经看中在中国低成本拓展市场的机会,随着外资投入逐步加大,中国国内企业改革重组迅速加快。
同时新的行业制度等政策的颁布和实施将促使我国电子计数器行业洗牌,企业兼并重组将在政策的促使下大力发展。
由于当前电子计数器行业效益下滑,所以对电子计数器行业企业授信更要慎重。
必须关注电子计数器行业子行业,关注电子计数器行业上下游企业,优化客户结构,针对电子计数器行业行业需求进行新产品开发。
国内的制造技术水平远不如国外,制造技术不仅是衡量一个国家科技发展水平的重要标志,也是国际间科技竞争的重点。
我国正处于经济发展的关键时期,制造技术是我们的薄弱环节。
只有跟上发展先进制造技术的世界潮流,将其放在战略优先地位,并以足够的力度予以实施,才能尽快缩小与发达国家的差距,才能在激烈的市场竞争中立于不败之地。
总之,在我国研究和发展先进制造技术势在必行。
English translationHistory about ElectronicsThere can be no doubt that the1900s is remembered as the electronic century. Of course there have been other great advances. In transport in science in commerce and many other fields but where would they have been without the instruments and devices that electronics has provided? How would see a 3D virtual reality image of your beating heat with no electronics? How would you get money out of the bank on a Sunday night without electronics? Would you go to a pop concert that had no amplifiers. large screens or lighting effects? Do not say you would rather watch TV-there would not be any.Electronics in the early 20th century started thriving at a greater speed unlike the pre-20th century developments. The radio invented by the Italian genius Marconi and the work of Henry Hertz opened the road to further discoveries and inventions. In the first decade the new thing that was welcomed to the technical world was the vacuum tube. The vacuum tubes at that time worked as a miraculous component for the radio devices.The real electronics what it is called today was actually started after the discovery of the transistor effect. Transistor opened the road for the electronics and more importantly it opened the road for the computing world. Computers of various types started hitting the market and the research works got a boost.Because of the strong point of ultrasonic energy consumption, slow, medium of communication in the distance, which are often used for ultrasonic distance measurement, such as the range finder and level measurement can be achieved by ultrasound. Use of ultrasonic testing is often more rapid, convenient, simple, easy to achieve real-time control, and measurement accuracy can meet the practical requirements of industry, in the mobile robot has been developed on a wide range of applications.The strong point of ultrasonic energy consumption, slow, medium of communication in the distance, so I often use ultrasonic to measure distance, such as the range finder and object measuring instrument, ultrasonic range finder device is provided aiming point device, as long as the instrument alignment of the object to be measured, there will be a point in the range finder display screen, mainly through the velocity measurement, invisible to the naked eye injection line总结与展望Ultrasonic range finder for transmitting at the same time the beginning of time, the ultrasonic transmission in the air, the way to meet the obstacle immediately return, ultrasonic receiver receives the reflected wave is interrupted immediately stop the clock. Through continuous detection of generated wave emission obstacle after the echo reflected, in order to detect ultrasonic and receives the echo T time difference, and then calculated the distance L.Ultrasonic range finder, because ultrasound is largely influenced by the surrounding environment, so the general measurement with short distance, lower measuring accuracy. The range of use is not very wide, but the price is relatively low, generally a few hundred Yuan.①A principle of ultrasonic distance measurement1, the principle of piezoelectric ultrasonic generator Piezoelectric ultrasonic generator is the use of piezoelectric crystal resonators to work. Ultrasonic generator, the internal structure as shown in Figure 1, it has two piezoelectric chips and a resonance plate. When it's two plus pulse signal, the frequency equal to the intrinsic piezoelectric oscillation frequency chip, the chip will happen piezoelectric resonance, and promote the development of plate vibration resonance, ultrasound is generated. Conversely, if the two are not inter-electrode voltage, when the board received ultrasonic resonance, it will be for vibration suppression of piezoelectric chip, the mechanical energy is converted to electrical signals, it becomes the ultrasonic receiver.2, the principle of ultrasonic distance measurementwave in gas, liquid and solid medium with different velocity, good directivity, energy concentration, attenuation in transmission process, small reflection ability. The ultrasonic energy at a certain speed, bi-directional communication obstacles after the formation of reflection, using this characteristic, through the determination of ultrasonic wave and the time can calculate the actual distance, so as to realize the non-contact measurement distance of objects. Ultrasonic rapid, convenient, and not affected by light and other factors, are widely used in hydrological measurement of liquid level measurement, construction site, site location, vibration monitoring instrument vehicle back-draft obstacle detection of mobile robot, position detection and other fields. This digital ultrasonic range finder based on ultrasonic round-trip time is input to a counter for counting clock pulses of specific frequencies, and display the corresponding distance measuring.Ultrasonic transmitter in a direction to launch ultrasound, in the moment to launch the beginning of time at the same time, the spread of ultrasound in the air, obstacles on his way to return immediately, the ultrasonic reflected wave received by the receiver immediately stop the clock. Ultrasound in the air as the propagation velocity of 340m / s,according to the timer records the time t, we can calculate the distance between the launch distance barrier (s), that is: s = 340t / 2 In order to study and use of ultrasonic, people have designed and made a lot of ultrasonic generator. Generally speaking, the ultrasonic generator can be divided into two categories: one category is generated by electrical .a class is generated by mechanical ultrasonic. Electrical means includes a piezoelectric type, type and electric type; mechanical Garr flute, the liquid whistle and air siren. They are generated by the ultrasonic frequency, power and acoustic characteristics of each are not identical, so the purpose is also each not same. At present, more commonly used is of the piezoelectric type.②Ultrasonic Ranging System for the Second Circuit DesignSystem is characterized by single-chip microcomputer to control the use of ultrasonic transmitter and ultrasonic receiver since the launch from time to time, single-chip selection of 8751, economic-to-use, and the chip has 4K of ROM, to facilitate programming. To circuit schematic diagram shown in Figure 2. Draw only the front range of the circuit wiring diagram, left and right in front of Ranging Rang circuits and the same circuit, it is omitted.140 kHz ultrasonic pulse generated with the launchRanging system using the ultrasonic sensor of piezoelectric ceramic sensors UCM40, its operating voltage of the pulse signal is 40kHz, which by the single-chip implementation of the following procedures to generate.Ranging in front of single-chip termination circuit P1.0 input port, single chip implementation of the above procedure, the P1.0 port in a 40kHz pulse output signal, after amplification transistor T, the drive to launch the first ultrasonic UCM40T, issued 40kHz ultrasonic pulse, and the continued launch of 200ms. Rang the right and the left side of the circuit, respectively, then input port P1.1 and P1.2, the working principle and circuit in front of the same location.2, reception and processing of ultrasonicUse to receive the first launch of the first pair UCM40R, the ultrasonic pulse modulation signal into an alternating voltage, the op-amp amplification IC1A and after polarization IC1B to IC2. IC2 is locked loop with audio decoder chip LM567, internal voltage-controlled oscillator center frequency of f0 = 1/1.1R8C3, capacitor C4 Determine their target bandwidth. R8-conditioning in the launch of the carrier frequency on the LM567 input signal is greater than 25mV, the output from the high jump 8 feet into a low-level, as interrupt request signals to the single-chip processing.Ranging in front of single-chip termination circuit output port INT0 interrupt the highest priority, right or left location of the output circuit with output gate IC3A access INT1 port single-chip, while总结与展望single-chip P1.3 and P1. 4 received input IC3A, interrupted by the process to identify the source of inquiry to deal with, interrupt priority level for the first left right after. Part of the source code is as follows: receive1: push PSWPUSH accCLR ex1; related external interrupt 1INB p1.1, right; P1.1 pin to 0, ranging from right to interrupt service routine circuitINB p1.2, left; P1.2 pin to 0, to the left ranging circuit interrupt service routineReturn: SETB EX1; open external interrupt 1POP ACCPOP PSWRETIRight: ...; right location entrance to circuit interrupt service routineAIMP ReturnLeft: ...; left ranging entrance circuit interrupt service routine AIMP Return4, the calculation of ultrasonic propagation timeWhen you start firing at the same time start the single-chip circuitry within the timer T0, the use of timer counting function records the time and the launch of ultrasonic reflected wave received time. When you receive the ultrasonic reflected wave, the receiver circuit outputs a negative jump in the end of INT0 or INT1 interrupt request generates a signal, single-chip microcomputer in response to external interrupt request, the implementation of the external interrupt service subroutine, read the time difference, calculating the distance . Some of its source code is as follows:RECEIVE0: PUSH PSWPUSH ACCCLR EX0; related external interrupt 0MOV R7, TH0; read the time valueMOV R6, TL0?CLR CMOV A, R6SUBB A, # 0BBH; calculate the time difference MOV 31H, A; storage resultsMOV A, R7SUBB A, # 3CHMOV 30H, ASETB EX0; open external interrupt 0POP ACC?POP PSWRETI③, the ultrasonic ranging system software designSoftware is divided into two parts, the main program and interrupt service routine, shown in Figure 3 (a) (b) (c) below. Completion of the work of the main program is initialized, each sequence of ultrasonic transmitting and receiving control.Interrupt service routines from time to time to complete three of the rotation direction of ultrasonic launch, the main external interrupt service subroutine to read the value of completion time, distance calculation, the results of the output and so on.④. CONCLUSIONSRequired measuring range of 30cm ~ 200cm objects inside the plane to do a number of measurements found that the maximum error is 0.5cm, and good reproducibility. Single-chip design can be seen on the ultrasonic ranging system has a hardware structure is simple, reliable, small features such as measurement error. Therefore, it can be used not only for mobile robot can be used in other detection systems.Thoughts: As for why the receiver do not have the transistor amplifier circuit, because the magnification well, CX20106 integrated amplifier, but also with automatic gain control level, magnification to 76dB, the center frequency is 38k to 40k, is exactly resonant ultrasonic sensors frequencyAn integrated circuit is a small electronic device made out of a semiconductor material. The first integrated circuit was development in the 1950s by jack KILLBY of Texas instruments and Robert NOYCE of Fairchild semiconductor.Care must be taken when connecting logic circuits to ensure that their logic levels and current ratings are compatible. The output voltages produced by a logic circuit are normally specified in terms of worst case values when sourcing or sinking the maximum rated currents. Thus Vo is the guaranteed minimum “high” voltage when sourcing the maximum rated “high” output current I, while is the guaranteed minimum “low” output voltage when sink ing the maximum rated “low” output current Io. There are corresponding specification for logic inputs which specify the minimum input voltage which will be recognized as a logic “high” state Vi, and the maximum input voltage which will be regarded as a log ic “low” state Vil.For input interface, perhaps the main problem facing the designer is that of electrical noise. Small noises signals may cause the system to malfunction, while larger amounts of noise can permanently damage it. The designer must be aware of these dangers from the outset. There are many methods to protect interface circuits and microcomputer from various kinds of noise. Following are some example:总结与展望1. Input and output electrical isolation between the microcomputer system and external devices using a isolator or a transformer.2. Removing high frequency noise pulses by a low-pass filter and Schmitt-trigger.3. Protecting against excessive input voltages using a pair of diodes to power supply reversibly biased in normal direction.For output interface, parameters of a logic device are usually much to low to allow loads to be connected directly, and in practice an external circuit must be connected to amplify the current and voltage to drive a load. Although several types of semiconductor devices are now available for controlling DC and AC powers up to many kilowatts, there are two basic ways in which a switch can be connected to a load to control it.With series connection, the switch allows current to flow through the load when closed, while with shunt connection closing the switch allows current to bypass the load. Both connections are useful in low-power circuits, but only the series connection can be used in high-power circuits because of the power wasted in the series resistor R..AT89C52Compatible with MCS-51™ Products8K Bytes of In-System Reprogrammable Flash MemoryEndurance: 1,000 Write/Erase CyclesFully Static Operation: 0 Hz to 24 MHzThree-level Program Memory Lock256 x 8-bit Internal RAM32 Programmable I/O LinesThree 16-bit Timer/CountersEight Interrupt SourcesProgrammable Serial ChannelLow-power Idle and Power-down ModesDescriptionThe AT89C52 provides the following standard features: 8K bytes of Flash, 256 bytes of RAM, 32 I/O lines, three 16-bit timer/counters, a six-vector two-level interrupt architecture, a full-duplex serial port, on-chip oscillator, and clock circuitry. In addition, the AT89C52 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port, and interrupt system to continue functioning. The Power-down mode saves the RAM contents but freezes the oscillator, disabling all other chip functions until the next hardware reset.AT89C52 Timer 2Timer 2 is a 16-bit Timer/Counter that can operate as either a timer or an event counter. The type of operation is selected by bit C/T2 in the SFR T2CON (shown in Table 2). Timer 2 has three operating modes: capture,auto-reload (up or down counting), and baud rate generator. The modes are selected by bits in T2CON, as shown in Table 3. Timer 2 consists of two 8-bit registers, TH2 and TL2. In the Timer function, the TL2 register is incremented every machine cycle. Since a machine cycle consists of 12 oscillator periods, the count rate is 1/12 of the oscillator frequency. In the Counter function, the register is incremented in response to a 1-to-0 transition at its corresponding external input pin, T2. In this function, the external input is sampled during S5P2 of every machine cycle. When the samples show a high in one cycle and a low in the next cycle, the count is incremented. The new count value appears in the register during S3P1 of the cycle following the one in which the transition was detected. Since two machine cycles (24 oscillator periods) are required to recognize a 1-to-0 transition, the maximum count rate is 1/24 of the oscillator frequency. To ensure that a given level is sampled at least once before it changes, the level should be held for at least one full machine cycle.With the rapid development of science and technology, the ultrasonic range finder in the more and more wide application. But the current technical level, people can use the specific range finder technology extremely limited, therefore, this is a booming and infinite prospect of technical and industrial areas. Looking to the future, ultrasonic range finder as a new type of very important and useful tool in a respect to have very big development space, it will move towards a more high-precision positioning in the direction of development, to meet the growing needs of the society, such as sonar basic trend for development: more suitable for operation in the shallow water of submarine sonar, especially in shallow sea target recognition problem to lower the submarine self noise, improve the working environment.Admit of no doubt, the future of the ultrasonic range finder with automation and intelligent community, and other rangefinders fusion, forming a rangefinder. As the range finder technology progress, ranging from simple judgment has the functions to the development has the learning function, the ultimate development of creativity. With the development of science and technology, the improvement of people's living standard, accelerate the development of city construction, city water supply and drainage system have greatly developed, the situation continues to improve. However, due to historical reasons the synthesis time lived many unpredictable factors, city water supply and drainage systems, especially the drainage system often lags behind the city construction. Therefore, often appear good building excavation has been building facilities to upgrade the drainage system phenomenon. Therefore, design and development of box culvert drainage dredging mobile robot automatic control system, to ensure the robot in the box culvert in free drainage dredging. Control system core part is the research and design of ultrasonic range finder.总结与展望In the new century, a new look of the range finder will play a better role.中文翻译电子技术历史毫无疑问的,20世纪是电子技术的世纪。