数据处理指令及应用
PLC功能指令—数据处理指令

2. 数据传送指令应用举例
【例题5.1】 设有8盏指示灯,控制要求是:当I0.0接通时,全部灯亮;当I0.1 接通时,奇数灯亮;当I0.2接通时,偶数灯亮;当I0.3接通时,电路图
例题5.1控制关系表
输入继电器
I0.0 I0.1 I0.2 I0.3
Q0.7 ● ●
Q0.6 ●
●
Q0.5 ● ●
输出继电器位
Q0.4 ●
●
Q0.3 ● ●
Q0.2 ●
●
Q0.1 ● ●
Q0.0 ●
●
输出继电器字节
QB0 16#FF 16#AA 16#55
0
例题5.1程序
模块五 功能指令
5.1
数据处理指令
一、转换指令
转换指令是对操作数的类型进行转换,并输出到指 定的目标地址中去。转换指令包括数据的类型转换、数 据的编码和译码指令以及字符串类型转换指令。
1、BCD码与整数之间的转换 2.双字整数转换为实数 3.四舍五入取整指令 4.截位取整指令 5.整数与双整数的转换 6.字节与整数的转换指令
转换指令如图:
二、传送指令
1.数据传送指令MOV
(1)数据传送指令的梯形图使用指令盒形式。指令盒由操作码MOV,数据 类型(B/W/DW),使能输入端EN,使能输出端ENO,源操作数IN和目标操作 数OUT构成。
(2)ENO可作为下一个指令盒EN的输入,即几个指令盒可以串联在一行 ,只有前一个指令盒被正确执行时,后一个指令盒才能执行。
PLC应用技术三菱课件.数据处理类应用指令

输入 作用
密码个位 密码十位 密码百位
输出继电器 Y0
输出 作用
密码锁控制信号
密码锁的密码由程序设定,假定为K283,从K3X0上送入的数据应和它相等,这可 以用比较指令实现判断,密码锁的开启由Y0的输出控制。梯形图如图5-12。
图5-12 密码锁梯形图
三、知识链接
1.比较指令CMP
虽然ZRST指令是16位处理指令,[Dl],[D2]也可以指定32位计数器。如图5-15 所示,将M0~M100的101位全部清0。
图5-15 ZRST指令说明
3.传送比较指令的基本用途
⑴用来获得程序的初始工作数据 ⑵用来进行机内数据的存取管理 ⑶用来运算处理结果并向输出端口传送 ⑷用来比较指令以建立控制点
⑴通用数据寄存器(D0~D199共200点) 通用数据寄存器一旦写入数据,只要不再写入其他数据,其内容就不会变 化。但是在PLC从运行到停止或停电时,所有数据被清除为0(如果驱动特殊辅助 继电器M8033,则可以保持)。 ⑵断电保持数据寄存器(D200~D7999共7800点) 只要不改写,无论PLC是从运行到停止,还是停电时,断电保持数据寄存 器将保持原有数据而不丢失。 以上的设定范围是出厂时的设定值。数据寄存器的掉电保持功能也可通过 外围设备设定,实现通用←→断电保持或断电保持←→通用的调整转换。
3.应用指令的格式
FX2N系列PLC在梯形图中使用功能框表示应用指令。图5-3a是应用指令的梯形 图示例。指令的功能是:当M8002接通时,十进制常数123将被送到辅助继电器 M7~M0中去,相当于用基本指令实现的程序如图5-3b。
图5-3 用应用指 令与基本指令实 现同样任务的比 较
⑴编号
应用指令用编号FNC00~FNC294表示,并给出对应的助记符。例如FNC12的 助记符是MOV(传送),FNC45的助记符是MEAN(平均)。
三菱PLC数据处理应用指令

三菱PLC数据处理应用指令
数据处理指令包含批复位指令、编码、译码指令及平均值计算指令等。
其中批复位指令可用于数据区的初始化,编、译码指令可用于字元件中某个置1位的位码的编译。
一、区间复位指令
区间复位指令ZRST(Zone Reset)将D1~D2指定的元件号范围内的同类元件成批复位。
二、解码与编码指令
解码(译码)指令DECO(Decode)的位源操作可以取X、Y、M和S,位目的操作数可以取Y、M和S。
字源操作数可以取K、H、T、C、D、V和Z,字目的操作数可以取T、C和D,n=1~8,只有16位运算。
编码指令ENCO(Encode)只有16位运算。
三、求置ON位总和与ON位判别指令
位元件的值为1时称为ON,求置ON位总和指令SUM 统计源操作数中为ON的位的个数,并将它送入目标操作数。
四、平均值指令
平均值指令MEAN是将S中指定的n个源操作数据的平均值存入目标操作数D中,舍去余数。
五、报警器置位复位指令
报警器置位指令ANS(Annunciator Set)的源操作数为T0~T199,目标操作数为S900~S999,n=1~32 767(定时器以100ms为单位设定)。
报警器复位指令ANR(Annunciator Reset)无操作数。
LC数据处理功能及应用
4.1 数据传送指令及应用
说明: 1)IN1指定乘数(除数),IN2指定被乘数(被除数
),要按字寻址;OUT按双字寻址,不能寻址常 数及专用字、双字存储器T、C、HC等; 2)该指令影响下列特殊内存位: SM1.0 (零); SM1.1(溢出); SM1.3 (除数为0), SM1.2 (负)。
第4章 PLC的数据处理功能及应用
4.字节、字、双字加1/减1指令
⑴指令格式及功能 梯形图LAD
INC_X EN IN OUT
DEC_X EN IN OUT
语句表STL INCX OUT DECX OUT
56 VB10 32 VB11 100 VB12 125 VB13 212 VB14
图4-2 块传送指令举例 第4章 PLC的数据处理功能及应用
PLC原理与应用 矿物加工工程专业可编程控制器电子教案
1.指令格式及功能
梯形图LAD
SWAP EN
IN
语句表STL SWAP IN
功能:
当使能位EN为1时, 将输入字IN中的 高字节与低字节 交换
SM1.2 (负);SM1.3 (除数为0) 。
第4章 PLC的数据处理功能及应用
PLC原理与应用 矿物加工工程专业可编程控制器电子教案
⑵指令编程举例 a)梯形图程序
VW0 300 ×
VW20 20 =
VW30 6000
fx3s编程手册应用指令

fx3s编程手册应用指令一、前言本手册旨在帮助用户理解和应用FX3S系列PLC编程中提供的各种应用指令。
FX3S是三菱电机的一款高性能PLC,广泛应用于工业控制领域。
本手册将详细介绍各种应用指令的功能、使用方法以及在编程中的实际应用。
二、指令分类FX3S编程指令主要分为以下几类:数据处理指令、控制指令、数学运算指令、输入输出指令、通信指令等。
掌握各类指令的使用方法和注意事项,将有助于用户在编程中更好地运用这些指令。
三、数据处理指令1. 数据传送指令:用于将数据在PLC内部及与外部设备之间进行传送。
如XMT和RCV指令。
2. 转换指令:包括数值到字符、数值到二进制、BCD到二进制等转换。
3. 算术运算指令:包括加、减、乘、除等运算指令。
4. 比较指令:用于比较数值大小,得到结果为逻辑假(0)或逻辑真(1)。
四、控制指令控制指令主要用于控制程序的流程,如条件判断、循环、跳转等。
常用的控制指令有条件跳转、循环、子程序调用等。
五、数学运算指令数学运算指令包括加减乘除等基本运算,以及三角函数、开方等高级运算。
这些指令在数学计算和控制算法中有着广泛的应用。
六、输入输出指令输入输出指令用于PLC与外部设备的通信,如传感器、执行器等。
常用的输入输出指令有模拟量输入输出、数字量输入输出等。
七、通信指令通信指令用于PLC与其他设备或系统进行通信。
FX3S系列PLC支持多种通信协议,如RS-232C、RS-485、MODBUS等。
常用的通信指令有数据传输指令(RS)、串行通信指令(SCL)等。
八、应用示例通过实际应用示例,用户可以更好地理解和掌握各种应用指令的使用方法和效果。
例如,使用数据处理指令实现数据的传送和转换,使用控制指令实现循环和条件判断,使用数学运算指令进行复杂的数学计算等。
九、注意事项在使用FX3S编程手册应用指令时,需要注意以下几点:1. 了解每种指令的适用场合和使用范围;2. 注意指令的参数设置和数据类型;3. 遵循安全规范,避免因错误使用指令导致系统故障或损坏;4. 不断学习和积累经验,根据实际需求选择合适的指令进行编程。
PLC的基本指令及程序设计
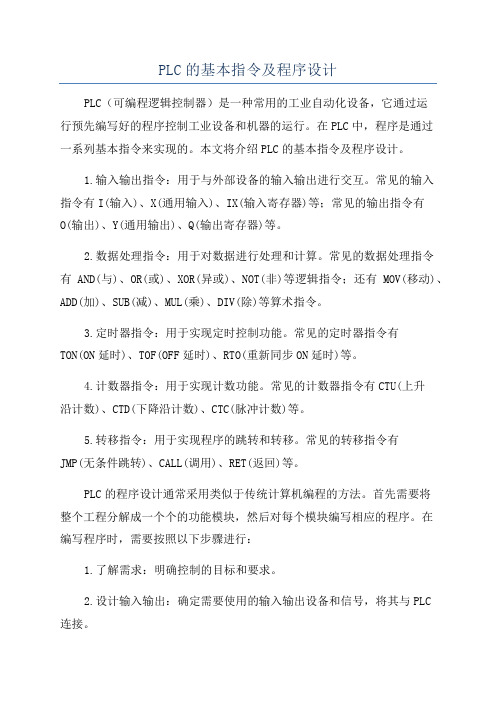
PLC的基本指令及程序设计PLC(可编程逻辑控制器)是一种常用的工业自动化设备,它通过运行预先编写好的程序控制工业设备和机器的运行。
在PLC中,程序是通过一系列基本指令来实现的。
本文将介绍PLC的基本指令及程序设计。
1.输入输出指令:用于与外部设备的输入输出进行交互。
常见的输入指令有I(输入)、X(通用输入)、IX(输入寄存器)等;常见的输出指令有O(输出)、Y(通用输出)、Q(输出寄存器)等。
2.数据处理指令:用于对数据进行处理和计算。
常见的数据处理指令有AND(与)、OR(或)、XOR(异或)、NOT(非)等逻辑指令;还有MOV(移动)、ADD(加)、SUB(减)、MUL(乘)、DIV(除)等算术指令。
3.定时器指令:用于实现定时控制功能。
常见的定时器指令有TON(ON延时)、TOF(OFF延时)、RTO(重新同步ON延时)等。
4.计数器指令:用于实现计数功能。
常见的计数器指令有CTU(上升沿计数)、CTD(下降沿计数)、CTC(脉冲计数)等。
5.转移指令:用于实现程序的跳转和转移。
常见的转移指令有JMP(无条件跳转)、CALL(调用)、RET(返回)等。
PLC的程序设计通常采用类似于传统计算机编程的方法。
首先需要将整个工程分解成一个个的功能模块,然后对每个模块编写相应的程序。
在编写程序时,需要按照以下步骤进行:1.了解需求:明确控制的目标和要求。
2.设计输入输出:确定需要使用的输入输出设备和信号,将其与PLC连接。
3.设计程序结构:根据需求将整个程序划分为多个功能模块,确定各个模块的输入输出。
4.编写程序:对每个功能模块编写相应的程序。
可以根据之前介绍的基本指令选择合适的指令进行编写。
6.优化程序:根据实际情况对程序进行优化,提高系统的性能和稳定性。
在程序设计过程中,还需要注意以下几点:1.确保程序的可读性:使用有意义的变量名和注释来提高程序的可读性,方便后续的维护与修改。
2.注意程序的实时性:PLC在工控系统中通常需要实时响应各种输入信号,因此需要确保程序的执行速度和响应快。
PLC应用技术3.4 知识点4数据处理指令

知识点4 数据处理指令1.知识目标(1)掌握数据处理指令的用法;(2)掌握高速处理指令的用法;(3)掌握部分方便指令、外部设备指令的用法;2.能力目标(1)能够运用功能指令编写8站小车的呼叫控制。
(2)能用功能指令编写花式喷泉控制程序(3)能用所学指令编写5台电动机顺序控制等控制程序。
(4)能用所学指令编写复杂彩灯控制程序并调试。
案例1引入:8站小车呼叫控制系统应用背景在工业生产和其他领域内,由于工作的需要,人们总是采用小车进行生产运输。
这可以减少工人的劳动强度,使人们避免受到其他的危害。
本项目将采用功能指令设计一个8站小车的呼叫控制系统,要求车所停位置号小于呼叫号时,小车右行至呼叫号处停车;车所停位置号大于呼叫号时,小车左行至呼叫号处停车;小车所停位置号等于呼叫号时,小车原地不动;小车运行时呼叫无效;同时小车在运行中具有左行、右行定向指示、原点不动指示;具有小车行走位置的七段数码管显示,如图4.4.1所示。
知识点4-数据处理指令一览1.区间复位指令ZRST(P)的编号为FNC40。
指令功能:它是将指定范围内的同类元件成批复位。
指令格式:如图所示,当X0由OFF→ON时,位元件M500~M599成批复位,字元件C235~C255也成批复位。
ZRST指令用法:1)[D1.]和[D2.]可取Y、M、S、T、C、D,且应为同类元件,同时[D1]的元件号应小于[D2]指定的元件号,若[D1]的元件号大于[D2]元件号,则只有[D1]指定元件被复位。
2)ZRST指令只有16位处理,占5个程序步,但[D1.][D2.]也可以指定32位计数器。
2.译码指令(1)译码指令DECO(P) 指令的编号为FNC41。
指令功能:根据n位输入的状态对2n个输出进行译码。
指令格式:如图所示,n=3 则表示[S.]源操作数为3位,即为X0、X1、X2。
其状态为二进制数,当值为011时相当于十进制3,则由目标操作数M7~M0组成的8位二进制数的第三位M3被置1,其余各位为0。
数据处理指令

DSUM,
DSUMP… 9步
BON,
BONP…7 步
DBON,
DBONP… 13步
求置1位总和指令是将源操作数S指定元件中置1的总和存入目标操作数D中。
S·
D·
X000
FNC 43 D0 SUM
D2
b15
b0
D0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 1
b15
b15
b0
D10 1 1 0 1 0 1 0 1 0 1 0 1 0 1 1 1
M0=ON
b15
b0
D10 0 0 1 0 1 0 0 0 0 0 0 0 1 0 0 1
M0=OFF
图7-35 置1位判别指令的使用说明
4、平均值指令
平均值指令的助记符、指令代码、操作数范围、 程序步如表7-29所示。
求置1位总和指令、置1位判别指令的助记符、指令代 码、操作数范围、程序步如表7-28所示。
表7-28 求置1位总和指令、置1位判别指令的要素
指令名称 指令 助记
操作数范围
代码 符
S(·) D(·)
n
程序步
置1位总和 FNC SUM K、H、KnX、 KnY、
43 SUM KnY 、 KnM 、 KnM、
(1 (P) KnS、T、C、 KnS
6/
D、V、Z T、C、
32)
D、V、
Z
置1位判别 FNC BON K、H、KnX、Y、M、 44 BON KnY 、 KnM 、 S (1 (P) KnS、T、C、
6/ 32)
D、V、Z
无
K、H n=0~ 15/16 位指令 n=0~ 31/32 位指令
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
脉冲频率 [S1*]最大频(10HZ~20KHZ) [S1*] HZ) (HZ)
10 9 8 7 10段 10段 6 变速 1 2
1次变速量是[S1*]的 次变速量是[S1*]的 3 十分之一
5 4 3 2 1
10段 4 5 10段 变速 6
7 [S2*]最高频率 [S2*]最高频率 8 16位:110~32767(PLS) 16位:110~32767(PLS) 9 32位:110~2147483674(PLS) 32位:110~2147483674(PLS) 10 时间
2.可调速脉冲输出指令
指令 令代码位数 S1( S1(*)
操作数范围 S2(*) S3(*)(*) D
程序步
只能指定 晶体管型 Y000及 Y000及 Y001
PLSY…9步 步 (D) ) PLSY…17步 步
PLSY(D) FNC59 ( ) PLSY (16/32) 16/32)
该指令用于指定脉冲宽度、脉冲周 产生脉宽可调脉冲输出的场合。 期 , 产生脉宽可调脉冲输出的场合 。 X10 FNC58 使用说明如图10-3,梯形图中[S1·]指 D10 K50 Y000 定 D10 存 入 脉冲宽度t,t理论上可在 PWM 0~32767ms 范围内选取,但 脉冲宽度t 脉冲周期T0 不能大于周期,即本例中D10的内容只 t 能在[S2·]指定的脉冲周期T0=50以内变 控制t/T0 Y000 化,否则会出现错误;[D·]指定脉冲输 T0 出Y号(晶体管输出型PLC中Y000或 Y001 ) 为 Y000 , 其 平 均 输 出对 应 为 0~100﹪。当X010接通时,Y000输出 10图10-3 脉宽凋制指令的使用 为ON/OFF脉冲,脉冲宽度比为T/T0, 可进行中断处理。
数量,电压、电流、温度、 数量 ,电压、电流、 温度、压力等物理量的量值变化可以转变为脉冲列频率的 变化。与此相反,定量的脉冲可以作为定量位移的驱动信号,调制输出脉冲的 变化。 与此相反, 定量的脉冲可以作为定量位移的驱动信号, 脉宽可以成为模拟信号输出的手段。因而近年来,PLC厂商都很重视产品的脉冲 脉宽可以成为模拟信号输出的手段。因而近年来,PLC厂商都很重视产品的脉冲 处理功能。 处理功能。 本章介绍FX 系列可编程控制器脉冲处理类元器件及指令, 本章介绍FX2N系列可编程控制器脉冲处理类元器件及指令,含高速计数器的类 使用方法、脉冲输出类指令及高速计数指令等, 型、使用方法、脉冲输出类指令及高速计数指令等,并给出了脉冲处理在工业 应用中的例子。 应用中的例子。
一、数量及类型
FN2N系列可编程序控制器设有C235~C255计21点高速计数器。它 们共享同一个机箱输入口上的6个高速计数器输入端(X000-X005 )。由于使用某个高速计数器时可能要同时使用多个输入端,而 这些输入端又不可被多个高速计数器重复使用,所以在实际应用 中,最多只能有6个高速计数器同时工作。这样设置是为了使高速 计数器具有多种工作方式,方便在各种控制工程中选用。FX2N系 列可编程序控制器高速计数器的分类如下。 1相无启动/复位端子(单输入) C235~C240 6点 1相带启动/复位端子(单输入) C241~C245 5点 1相2计数输入型 C246~C250 5点 2相双计数输入型 C251~C255 5点 下表列出了以上高速计数器和各输入端子之间的对应关系。从表 中可以看到,X006及X007也可以参与高速计数工作,但只能作为 启动信号而不能作为计数脉冲信号的输入。
1.脉冲输出指令
指令 名称 助记符 指令代码 位数 操作数范围 S1( S1(*) S2( S2(*) D(*)
只能指定 晶体管型 Y000及 Y000及 Y001
PLSY…7步 步 (D) ) PLSY…13步 步
程序步
( ) 脉冲 PLSY(D) FNC57 PLSY 输出 16/32) (16/32) 指令
一、FX2N系列可编程控制器的脉冲输出功能
随着脉冲技术的发展, 随着脉冲技术的发展,脉冲输出常出现在工业控制 设备中,脉冲数量可以对应一定的物理理值。比如, 设备中,脉冲数量可以对应一定的物理理值。比如,在 步进电机中,一个脉冲可以对应一定的角位移, 步进电机中,一个脉冲可以对应一定的角位移,脉冲的 速度率调节可以对应于电机转速的变化。 速度率调节可以对应于电机转速的变化。在需要模拟量 控制的场合,脉宽调制可以用来实现模拟量辐值的变化。 控制的场合,脉宽调制可以用来实现模拟量辐值的变化。 系列可编程控制器在FX FX2N系列可编程控制器在FX2系列机基础上新增加了脉冲 输出功能, 通过本机( 晶体管输出型) 输出功能 , 通过本机 ( 晶体管输出型 ) 特定的输出口 Y000、Y001) (Y000、Y001)可输出指定频率及数量的脉冲串或输出 脉冲宽度可调制的脉冲串, 脉冲宽度可调制的脉冲串,用于简单的定位控制及模拟 量控制。 量控制。 以下是脉冲输出类指令的说明。 以下是脉冲输出类指令的说明。
K、H
Kn X、 Kn Y、 Kn M、 Kn S
T、C、D、V、Z
该指令可用于指定频率、 该指令可用于指定频率 、产生定理脉冲输出的场 [S1·]用于指定频率,范围为2~20kHz [S2·] 2~20kHz; 合 。 [S1 ] 用于指定频率 , 范围为 2~20kHz ; [S2 ] 用于
X0
[S1*]
FNC57
[S2*] [D*]
PLSY
K1000 D0
Y000
脉冲量(D0) Y000 1KHZ
图10-1 脉冲输出指令的使用 10-
指定产生脉冲的数量,16位指令指定范围为 位指令指定范围为1 32767。 指定产生脉冲的数量 , 16位指令指定范围为1~32767。 32位指令指定范围为 位指令指定范围为1 2147483647。[D·] 32位指令指定范围为1~2147483647。[D ]用以指定输出 脉冲的Y 仅限于晶体管型机Y000 Y001), Y000、 ),输入脉冲 脉冲的Y号(仅限于晶体管型机Y000、Y001),输入脉冲 的高低电平各占50 50﹪ 的高低电平各占50﹪。 指令的执行条件X010接通时,脉 冲串开始输出,X010中途中断时,脉冲输出中止,再次 接通时,从初始状态开始动作。设定脉冲量输出结束 时,指令执行结束标志M8029动作。脉冲输出停止。当 设置输出脉冲数为0时为连续脉冲输出。[S1·]中的内容在 指令执行中可以变更,但[S2·]的内容不能变更。输出口 Y000输出脉冲的总数存于D8140(下位)D8141(上位) 中,Y001输出脉冲总数存于D8142(下位)D8140(上位) 中。Y000及Y001两输出口已输出脉冲的总数存于D8136 (下位)D8137(下位)中。各数据寄存器的内容光焕 发可以通过[DMOV K0D81口口]加以清除。
[S1*] [S2*] [D*]
二 FX2N系列可编程控制器的高速计数器
高速计数器顾名思义是对较高频率的信号计数的计数器,与普通计数器的主 要差别在于以下几点。 (1) 对外部信号计数,工作在中断工作方式,由于待计量的高频信号都 是来自机外,可编程序控制器都设有专用的输入端子及控制端子,一般 是在输入中设置一些带有特殊功能的端子,它们既可完成普通端子的功 能,又能接收高频信号,为了满足控制准确的需要,计数器的计数、启 动、复位及数值控制功能都能采取中断方式工作。 (2) 计数范围较大,计数频率较高,一般高速计数器均为32位加减计数 器。最高计数频率一般可达到数10kHz。 (3) 工作设置较灵活,从计数器的工作要素来说,高速计数器的工作设 置比较灵活。高速计数器除了具有普通计数器通过编程指令完成启动、 复位,使用特种辅助继电器改变计数方向等功能外,还可通过机外信号 实现对其工作状态的控制。如启动、复位、改变计数方向等。 (4) 使用专用的工作指令,普通计数器工作时,一般是达到设定值,其 触点动作,再通过程序安排其触点实现对其他器件的控制。高速计数器 除了普通计数的这一工作方式外,还具有专门的控制指令,可不通过本 身的触点,以中断工作方式直接完成对其他器件的控制。
梯形图中各操作数的设定内容如下。 [S1·]最高频率,设定范围为10~20kHz,并以10的倍数设定,若指定1位数时,则结束 最高频率, 最高频率 运行。在进行定减速时,按指定的最高频率的1/10作为减速时的一次变速量,即 [S1·]的1/10。在应用该指令于步进电机时,一次变速量应设定在步进电机不失调的 范围。 [S2·]是总输出脉冲数(PLS)。 是总输出脉冲数( )。设定范围为:16位运算指令,110~32767(PLS);32 是总输出脉冲数 )。 位指令,110~2147483647(PLS);若设定不满110值时,脉冲不能正常输出。 [S3·]是加减速度时间(ms),加速时间与减速时间相等 是加减速度时间( ),加速时间与减速时间相等。加减速时间设定范围5000ms ),加速时间与减速时间相等 是加减速度时间 以下。应按以下条件设定。 ① 加减速度时需设定在PLC的扫描时间最大值(D8012)的10倍以上,若设定不足10 倍时,加减速不一定计时。 ② 加减速时间最小值设定应大于下式,即[S3·]<[S1·]/[S2·]×818 若小于上式的最小值,加减速时间的误差增大,此外,设定不到90000/[S1·值时,在 9000/[S1·]值时结束运行。 ③ 加减速时间最小值设定小于下式[S3·] >90000/[S1·]×5 ④ 加速的变速数按[S1·]/10,次数固定在10次。 在不能按以上条件设定时,应降低[S1·]设定的最高频率。 [D·]为指定脉冲输出的地址号,只能是Y000及001,且不能与其他指令共用。其输出频 率为10~20kHz,指令设定的最高频率、减速时的变速度超过了此范围时,自动在 该输出出范围内调低或进位。FNC59(PLSR)指令的输出脉冲数存入的特殊数据寄 在职顺与FNC57(PLSY)相同。
[S3*]加速时间 [S3*]加速时间 5000ms以下 以下
图10-2(b)波形图 10-