Product geometric crossover for the sudoku puzzle
UG术语中英文对照

Align|对齐
Aligncurve|对准曲线
AlignView|对齐视图
Aligningdrawingviews|对准图纸视图
Alignment|对准
Alignmentmethods|对准方法
Bypoints|通过点
Bypoles|通过极点
Bysegments|按段数
Bytolerance|按公差
admin (2006-9-25 10:42:13)
Calculatorcapabilities|计算器功能
Callouts|零件明细表序号
CameraSetp|摄像机步长
Cancel|取消
Associativity|相关性
Associativityofutilitysymbols|实用符号的相关性
Atangletovector|与矢量方向成角度
AtTimestamp|按时间标记
Attachment|附着
Attachmentmethods|附着方式
Attribute|属性
Build|生成
Bundle|捆
But|除
Bycorners|按拐角分段
Byequalsegments|按等长分段
ByEquation|按方程式
Byinputarclengthsegments|按输入的弧长分段
Byknotpointsegments|按节点分段
Bylawcurve|按规律曲线
Classifcation|分类
Classification|分类
Clear|清除
光电英语词汇(G)-英语行业-专业词汇-

光电英语词汇(G)更多英语行业-专业词汇-请点击这里获得gain cell 增益室gain coefficient of medium 媒质增益系数gain control 增益控制gain crossover 增益窜渡gain curve of medium 媒质增益曲线gain decay characteristic 增益衷减特性gain factor 增益因数gain invertion 增益反转gain margin 增益容限gain of light 光增益gain per pass 单程增益gain spiking 增益巅值gain stage 增益级gain staturation 增益饱和gain-bandwidth product 宽频增益器gain-bandwithd 增益带宽gain-guided laser 增益导引雷射gain-switching amplifier 增益开关放大器gain-switching system 增益开关系统gal 伽galaaxy 银河系galactic irradiance 银河系辐照度galactic noise 银河系噪声galaxy 银河Galilean binocular 伽利略双筒望远镜Galilean eyepiece 伽利略目镜galilean refracting telescopes 折射望远镜,Galilean 望远镜Galilean telescope 伽利略望远镜galilent telescope 加利略望远镜galley camera 制版照相机gallium (Ga)镓gallium aluminum arsenide (GaAIAs or AIGaAs)砷铝化镓gallium antimonite (GaSb)锑化镓gallium aresenide injection laser 砷化镓注入式激光器gallium arseide detector 砷化镓探测器gallium arsenide 砷化镓gallium arsenide photphide 磷砷化镓gallium arsenide (GaAs) injection laser 砷化镓注入雷射gallium nitride 磷化镓gallium photsphide (GaP)加仑gallium-arsenide optical filter 砷化镓滤光片gallon (gal)电流探测galvanic detection 镀锌galvanoluminescence 电流发光galvanometer 电流计galvanometer mirror 电流计镜galvanometer recorder 电流计记录器galvanometer shunt 电流计分流器galvanometer spot project 电流计光点投影器galvanometerh 电流计gamma 加玛gamma camera 加玛射线照像机gamma control r控制gamma correction r校准gamma irradiation r辐射gamma radiography 加玛防线照像术gamma ray r射线gamma ray detector 伽玛射线检测器gamma ray image converter r射线变像管gamma sphere 伽玛射线球gamma value r值gamma-ray astronomy 伽玛射线天文线gamma-ray fluoroscope r射线荧光镜gamma-ray gauge r射线测量计gamma-ray hologram r射线全息图gamma-ray laser r射线激光器gamma-ray meter r射线测计,r剂量计gamma-ray projector r射线投影器gamma-ray spectrograph r射线摄谱仪gamma-ray spectromete r伽玛射线分光计gamma-space r空目gammagraph r照相装置gammagraphy r照相术gamut (1)音阶(2)色移GaN 氮化镓GaN LED 氮化镓发光二极体Ganecke projection 甘奈克投影gang capacitor 其轴电容器gang switch 共轴开关GaP 磷化镓gap coding 空隙编码gap conunter 间隙计数器gap length 气隙长度gap loss 间隙损失gap-gauge 厚薄尺,塞尺Garching iodine laser system 伽斤碘激光系统garment (1)外套,外表(2)外涂层garmnet 石榴石garnet crystal 石榴晶体garnet laser 石榴石激光器gas (1)气体(2)媒气gas absorption cell 气体吸收元件gas active material 气体激光材料gas amplification 气体放大gas analysis 气体分析gas ballast rotary pump 气镇旋转泵gas breakdown 气体击穿gas breakdown threshold 气体击穿阈gas chromatograph 气象色谱gas chromatography 气相色谱gas chromatorgarma 气相色谱gas clean up 气体除净gas current 气体电流gas detector 气体检测器gas diode 气体二极管gas diode phototube 充气光电二极管gas discharge 气体放电gas discharge display 气体放电显示器gas discharge laser 气体放电雷射gas dynamic CO-laser 气动-氧化碳激光器gas dynamic laser 气体激光器gas etching technique 气体刻蚀技术充气的gas filled cable 充气电缆gas filled rectifier 充气整流器gas filled tube 充气管gas filter correlation 气体滤器相关gas focusing 气体聚焦gas laser 气体激光高度计gas laser altimeter 气体透镜gas lens 混合气体透镜gas magnification 气体放大gas mixture lens 汽油gas photocell 气体光电池gas recyclers and gas handling equipment 气体再生设备,气体填充设备gas ring laser 不透气的,气密的gas tightness 气体迁移激光器gas tube 气体管gas-ballatsing 气镇gas-discharge 气体放电gas-discharge cell 气体放电元件gas-discharge lamp 气体放电灯gas-discharge laser 气的放电激光器gas-discharge noise 气体放电噪声gas-discharge plasma 气体放电等离子体gas-discharge source 气体放电光源gas-discharge tube 气体放电管gas-filled 充气灯gas-filled lamp 充气激光管gas-filled laser tube 充气光电管gas-filled phototube 充气钨丝灯gas-filled tungsten-filament 气体注入式激光器gas-injection laser (1)衬垫(2)垫圈gas-phase laser 气环形激光器gas-tight 气密性gas-transport laser 充气三极管,闸流管gas-transport laser (GTL)气体输送雷射gasdynamic 气动的gasdynamic mixing laser 气动混合激光器gasdynamic mode 气动模gasdynamic type of chemical laser 气动式化学激光器gaseous 气体的gaseous cascade laser 气体串级激光器gaseous discharge 气体放电gaseous medium 气体媒质gaseous target 气体靶gases for lasers 雷射用气体gases for optical application 光学用气体gasket 气体激光器gasoline 气相激光器gassing 释气gastriode 纤维胃窥镜gastrofiberscope gastroscope 胃镜gastroscope 胃窥镜,胃视镜gate (1)门电路(2)选通脉冲(3)电影放大镜头窗口gate bias 栅偏压Gate Driver IC 闸极驱动IC gate float 浮动窗框gate mask 孔板gate pulse 选通脉冲,门脉冲gate trigger signal 闸极驱动讯号gate turn off signal 闸极关闭讯号gate value 门阀gate width 选通脉冲宽度gate-controlled switch 闸控开关gated amplifier 选通放大器gated aradiometer 选通辐射计gather 导入,引入gating 选通,开启gating pulse 选通脉冲gating siganl 选通信号gatling gun laser 卡特林机枪雷射(连发式雷射)gauge batr 规杆gauge block 规块gauge caliper 测径规gauge feeler 厚薄规gauge glass 量液玻璃管gauge hole 标准孔gauge outfit 测量头,表头gauge point 标记点gauge pressure 计示压力,表压gauge (=gage)(1)规(2)计(3)测量gauge[-block] interferometer 规块干涉仪gauging error 分度误差,检定误差gauss 高斯Gauss beam 高斯光束Gauss double type object-lens 双高斯型物镜Gauss eyepiece 高斯目镜Gauss optics 高斯光学Gauss plane 高斯平面Gauss point 高斯点gauss points 高斯点Gauss theorem 高斯定理Gauss transform 高斯变换Gauss-condition error 高斯条件误差Gauss-invariant co-ordinates 高斯不变坐Gaussian band-pass filter 高斯带通滤波器Gaussian beam 高斯光束Gaussian curvature 高斯曲率Gaussian distribution 高斯分布Gaussian doublet 高斯型双胶合透镜Gaussian elementary beam 高斯基本光束Gaussian error 高斯误差Gaussian flux law 高斯通量定律Gaussian function 高斯函Gaussian image 高斯像Gaussian laser beam 高斯激光束Gaussian lens formula 高斯透镜公式Gaussian lineshape 高斯线型Gaussian noise 高斯噪声gaussian optics 高斯光学Gaussian probability-density function 高斯概率密度函数gaussian pulse 高斯脉冲Gaussian reference sphere 高斯参考球Gaussian reflectivity 高斯反射率Gaussian regaion 高斯区域Gaussian wave train 高斯波列gaussmeter 高斯计,磁强计gauze filter 网状滤波器gauze technique 线网技术Gaviola test 加维拉检验法Ge mesa transistor 锗台式晶体管Ge photodiode array camera tube 锗光电二极管阵列摄像管gear (1)齿轮(2)传动装置gear bank 齿轮组gear box (gear case)齿轮箱gear coupling 齿轮联轴节gear drive 齿轮传动gear lead checking machine 齿轮导程检查仪gear lever 变速杆gear mesh 齿轮齿合gear rack 齿轮齿条gear sector 扇形齿轮gear shift 变速,调档gear sprial 螺旋齿轮gear testing machine 齿轮检查仪,测齿仪gear thickness gauge 齿厚规gear tooth venier caliper 厚游标卡尺gear wheel 齿轮gear wheel shaft 齿轮轴gear wheel tester 齿轮检查仪gear-type coupling 齿轮联轴节gearing (1)齿轮装置(2)传动装置gegenschein-zodiacal light photometer 积坚斯因,祖弟卡光线光度计Geiger counter 盖革计数器Geiger Mueller region 盖氏弥勒区域Geiger Mueller threshold 盖革弥勒阈值Geiger-mueller counter 盖革一弥计时器Geiger-Muller ballast 盖革-弥勒计数管Geiger-Muller coungter 盖革-弥勒计数管geigerscope 闪烁镜geissler tube 盖斯勒管gel 凝胶gel layer 凝胶层gelatine 明胶gelatine filter 明胶滤光镜gelogy 地质学gemoetrical error 几何误差genal drawing 总图general assembly 总装配general computer 通用计算机general confocal resonator 泛共焦共振腔general isoplanatism theorem 广义等晕定理general radiation scattering 连续辐射散射general view 总图,全视图general wave-beam guide 通用波导general-purpose camera 通用照相机generalized coordinates 广义坐标generalized Lagrange invariant 广义拉格朗日不变量generalized projection 广义投影generalized pupil function 广义光瞳函数generalized relative aperture 广义相对孔径generating mark 磨胚痕generation 磨胚generation electric field meter 发电式电场计generation lifetime (1)发生涛命(2)生成寿命generation Ⅱwafer tube 第二代晶圆管generation-recombination noise 振荡复合噪声generator (1)振荡器(2)发生器(3)发电机(4)母线generator field control 发电机场控制generatrix 母线genescope 频率特性观测仪genetic engineering 遗传工程学genlock 内锁genmetric concentration 几何传中率genoralized inverse matrix 广义逆矩阵geocenter 地球质量中心geodesic lens 测地镜头geodesic leveling 大地水准测量geodesy 大地测量学geodetic datum 天地基准点geodetic instrument 大地测量仪器geodetic measurement 大地测量geodetic survey 大地测量geodimeter 光电测距仪geodynamic satellite 地球动力卫geodynamics 地球动力学geographic survey 地图测量geographical coordinates 地图坐标,地理坐标geography 地理geoid 大地水准面geological mapping 地质测绘geological survey 地质测量geologit's compass 地质罗盘仪geomagnetic field 地磁场geometrcial transformation 几何变化geometric extent 几何领域geometric metamerism 几何的同差异构性geometric operations 几何作业geometric optics 几何光学geometrical aberration 几何像差geometrical axis 几何轴geometrical broadening 几何展宽geometrical center 几何中心geometrical cross section 几何截面geometrical drawing 几何图geometrical focus 几何焦点geometrical gropression 几何级数geometrical image 几何像geometrical leveling 几何水准测量geometrical optics 几何光学geometrical projection 几何投影法geometrical relationship 几何关系geometrical scanner 几何授描器geometrical shadow 几何阴影geometrical similarity 几何相似性geometry 几何学geomorphology 地貌学,地形学geophysical survey 地球物理测量geophysics 地球物理学Georan (geodetie ranger)大地测距仪geoscience 地球科学geostationary satellite 同步卫星geosynchronous orbit 同步轨道geosynchronous satellite 地球同步卫星germainium imaging sensor 锗成像传感器germainium lens 锗透镜germainium-doped optical fibre 掺锗光学纤维German Illuminating Engineeering Society (DL TG)德国照明工程协会German silver 德银germanium (Ge)锗germanium bolometer 锗测辐射热器germanium detector 锗探测器germanium polarizer 锗偏振器germanium-mosaic image-convertor 锗镶嵌变像管germanium-silicaon alloy 锗硅合金germicidal lamp 杀菌灯germinium-doped silica 掺锗二氧化硅getter (1)吸气剂,收气剂(2)吸杂剂getter bulb 吸气剂管getter material 吸气材料GGG laser crystals 雷射晶体(GGG)ghost effect 寄生效应ghost image 鬼像,幻像ghost line 鬼线ghost peak 假峰ghost prism 鬼棱镜ghost surface 假面ghost-strenght 鬼像强度ghosts 幻影giant optical pulsation 巨光脉冲giant pulse (GP)巨脉冲giant pulse emission 巨脉冲发射giant pulse technique 巨脉冲技术giant resonance 巨共振giant-pulse laser 巨脉冲激光器gib clamp 扁栓制动机构gibbs 吉卜斯Gibbs' phenomena 吉卜斯现象giga (G)吉,千兆giga-electron-volt 吉电子伏,千兆电子伏GIGABIT ethernet network equipment 超高速乙太网路设备gilbert (Gb)吉伯gilding (1)镀金(2)镀金术gimbal 常平架,平衡环gimbal lock 常平架锁定gimbal mount 常平架座glaass-sealed 玻璃封接的Glan polarizer 格兰起偏振镜glan spectrophotometer 葛兰分光光度计Glan-Foucault polarizing prism 格兰-傅科偏振棱镜glan-thompson prism 葛兰-汤普生棱镜Glan-Thomson prism 格兰-汤姆逊棱镜glan-thomson prismsGlan-Thomson 棱镜glancing angle 掠射角glancing incidence 掠入角gland (1)衬垫压盖(2)密封装置gland nut 压紧螺母glarimeter 光泽计glaring 耀眼的glas laswer 玻璃激光器glass (1)玻璃(2)望远镜(3)显微镜(4)放大镜glass and glass-ceramic mirrors 玻璃,玻璃/陶瓷面镜glass annealing furnace 玻璃退火炉glass barium (Baryta)钡玻璃glass bead screen 玻璃球屏幕glass beads 玻璃珠glass blowing 吹玻璃glass capacitor 玻璃电容器glass capillary 玻璃毛细管glass cement 玻璃胶glass cement surface 玻璃胶合界面glass ceramic 玻璃陶瓷glass cuter 玻璃刀glass dial 玻璃刻度些glass disk laser 玻璃圆盘激光器glass disk scale 玻璃刻度盘glass dosimeter 玻璃软片板glass electrode 玻璃电极glass fiber 玻璃纤维glass fiber waveguide 玻璃纤维波导glass film plates 玻璃雷射glass filter 滤光镜glass generators 玻璃产生机glass laser 上色墨glass laser targer 玻璃激光靶glass lasers 玻璃雷射glass marking inks 玻璃上色墨glass melting furnace 玻璃熔炉摄谱仪glass mirror 玻璃镜glass plate 玻璃板glass powder 玻璃粉glass precision scale 精密玻璃刻尺glass rod 玻璃棒glass scale 玻璃分划尺glass shot (1)闪光玻璃(2)特技摄影glass sight 光学瞄准具glass slip 玻璃片glass spectrograph 玻璃摄谱仪glass substrate 玻璃基板glass target 玻璃靶glass transition temperature 玻璃软化温度glass-air interface 玻璃-空气分界面glass-beaded 玻璃熔接的glass-engraving 玻璃雕刻glass-fiber cabie 光缆glass-fiber guide 玻璃纤维波导glass-fiber laser 玻璃纤维激光器glass-on-glass ddrawing technique 玻璃拨丝技术glass-path 玻璃光程glass-processing 玻璃加工的glass-shell target 玻璃空心靶glasses 眼镜glassine 玻璃射glassiness 玻璃质glassing machine 抛光机glassite 玻璃抛光分glassy 透明的,玻璃状的glassy chalcogenide 透明硫化物glassy chalcogenide semiconductor 透明硫化物半导体glaucoma 绿内障,青光眼glaze wheel 研磨轮Glazebrook prism 格累兹布鲁克棱镜glazer 抛光轮glazing (1)抛光,磨光(2)配玻璃glazing machine 抛光机gleam 发光,闪光glide plane 滑移平面glide reflection 滑移反射glimmer (1)微光,微弱闪光(2)云母glint (1)光反射(2)闪烁glisten (1)反光(2)闪光glitter 闪烁global monitoring 全球监控global radiation 金球辐射globar 碳化硅棒globar element 碳化硅棒元件globar meterial 碳化硅棒材料globar source 碳化硅棒光源globe 球,球体globe lens 球透镜globe photometer 球形光度计globular bulb 球状灯泡globular projection 球面投影globule 小球体globulite 滴晶glory ray 彩色glosgloss meters 光泽计gloss 光泽gloss meter 光泽计glossiness (1)光泽度(2)砖光度glossy paper 光面相纸glossy specimen 光泽样品glow 辉光glow ballast 辉光管glow characteristic 辉光特性曲线glow discharge 辉光放电glow factor 辉光因数glow lamp 辉光放电管,白炽灯glow modulator tube 辉光调制管glow plasma 辉光等离子体glower 炽热体glue line heating 胶线加热gluing 胶合,黏合glyceriin-immerision system 甘油油浸系统go-gauge 通过规go-no-go gauge 过端-不过端量规gobo (1)镜头挡光板(2)吸声板goggles 护目镜,风镜Golay cell 高莱探测器gold (Au)金gold blackbody 金黑体gold flaser 金激光器gold foil 金箔gold leaf electroscope 金箔验电器gold-doped 掺金的goldberg wedge 戈伯劈gon 百分度gonimeter eyepiece 测角目镜goniometer (1)测角器(2)测向器goniometer eyepiece 测角器目镜goniometry (1)测角术(2)测向术goniophotometer 测角光度计goniophotometric curve 测角光度曲线gonioradiometer 测角轴射计Gonioscopic prism 视轴角度棱镜gonometric (1)测角的(2)测向的Gotar lens 戈塔镜头grad criteria 等级判据gradation (1)层次(2)分级(3)等级grade (1)等级(2)坡度grade of fit 配合等俏grade-index 递级指数graded coating 等级涂层graded deposit 递级淀积层graded index 陡度折射率graded refractive index 陡度折射率graded-index glass fiber 陡度折射率玻璃纤维graded-index potical fiber 陡度折射率光学纤维graded-index potical waveguide 陡度折射率光学波导gradient 陡度,梯度gradient edge enhancement 梯度边增强gradient neutral density filter 陡度中性密滤光片gradient refractive index 陡度折射率gradient spectrum 陡度光谱gradient vector 梯度向量gradienter 陡度计,测斜度计gradual approximation 渐次近似法gradual cut filter 阶梯式截止滤光片graduated circle 分度圈graduated ring 分度圈graduated scale 分度尺graduation 分度,刻度graduation line 分度线,刻度线graduation mark 分度符号graduator 分度器gradusated filter 分度滤光片grain 粒,晶粒grain isolating diaphragm 晶粒隔离光阑grain noise 颗粒噪声grain refinement 晶粒细化grain size (1)粒度(2)晶粒大小grain structure 颗粒特构graininess (1)粒度(2)颗粒性graininess of the photographic image 相片影像的颗粒度gram 克gram atom 克原gram molecule 克分子gram-rad 克-弧度gramme ring 格阑姆环Grandagon 格朗达贡granlte 花岗岩granular 颗粒状的granular structure 颗粒结构granularity (1)颗粒度(2)颗粒性granulation 颗粒化grape jelly 葡萄胶graph 线图graph plotter 制图仪graphechon 阴极射线存储管graphecon 阴极射线储存管graphic 图示的,图解的graphic analysis 图解分析graphic arts 图解艺术graphic arts camera 图解艺术照相机graphic arts equipment 图解艺术设备graphic chart 图表graphic display 图形显示graphic instrument 图解仪graphic language 图像语言graphic meter 自动记录仪graphic method 图示法graphic panel 图示板graphic projection disply 图形投影显示graphic recorder 图形记录器graphic representation 图示,图形表示法graphic scale 图示比例尺graphical construction of image 成像图法graphical design of otpical system 光学系统图解设计graphical integration 图解积分graphical ray tracing 图解光路追踪graphics 图解法,图示学graphite 石墨graphitic carbon 石墨碳graser 伽射graser (gamma-ray laser) r激光器graser rodr 激光棒grasshof number 革拉秀夫数grate 格栅graticule (1)十字线(2)分度镜grating 光栅grating beam-divider 光栅光束分离器grating constant 光栅常数grating coupled 光栅耦合的grating coupler 光栅耦合器grating dip 光栅浸渍grating efficiency 光栅效率grating interferometer 光栅干涉仪grating line 光栅划线grating lobe 光栅波瓣grating monochromator 光栅单色仪grating pair 光栅对grating prism 光栅棱镜grating recombiner 光栅光束重合器grating reflector 栅状反射器grating satellite 光栅伴线grating shearing interferometer 光栅剪切干涉仪grating space 光栅间距grating spectrograph 光栅摄谱仪grating spectrometer 光栅分光计grating spectronmeter 光栅分光计grating spectrum 光栅光谱grating spectrum satellite 光栅光谱伴线grating storage target 栅状信息存储靶grating substrate 光栅衬底grating (chromatic resolving power)光栅(色监别能力)grating-coupled radiation 光栅耦合辐射grating-like hologram 类光栅全息图grating-ruling engine 光栅刻线机gravimeter 重差计gravitational field (1)引力场(2)重力场gravitational force (1)引力(2)重力gravitational imaging 重力造像gravitational method 重力法gravitational red shift 引力红移gravitational waves 重力波gravity 重力gravity interferometer 重力干涉仪gravitycell 重力电池gravure microscope 照相制版用显微镜gray (1)灰色(2)灰色的gray body 灰体Gray code 葛莱码gray levels 灰色阶层gray scale 灰色刻度gray scales 灰色标gray-level mask 灰阶光罩gray-scale image 灰色刻度相gray-scale modification 灰色刻度修正grazing angle 掠射角grazing emergence (1)掠射(2)临界出射grazing incidence 掠入射grazing-incidence diffraction 掠入射衍射grazing-incidence grating 掠入射光栅grazing-incidence interferometer 掠入射干涉仪grazing-incidence mounting 掠入射装grease 润滑脂grease-spot photometer 油斑光度计green (1)绿色(2)绿色的green block 绿块green disk 革忍碟green filter 绿色滤光器green laser 绿光激光器green mercury light 汞绿光green radiation 绿辐射green region 绿区Green's function 格临函数Green's theorem 格临定理green-house effect 温室效应Green-Twyman interferometer 格临-揣曼干涉仪green-yellow light 黄绿光greenough microscope 革忍欧夫显微镜Greenwich meridian 格林尼治子午线Greenwich sidereal time 格林尼治恒星时Greenwich time 格林尼治时Gregorian mirror 格雷果反射镜Gregorian telescope 格雷果里望远镜grenz rays 界射线grey (1)灰色(2)灰色的grey body 灰色体grey body radiation 灰色体射grey filter 灰滤色镜grey glass 灰玻璃grey level 灰度级grey photometric wedge 灰色光楔grey scale 灰度标grey surface 灰表面greyness 灰色grid (1)栅极(2)格栅(3)电池铅板grid azimuth 平面方位角grid bias cell 栅偏压电池grid blocking 栅遮断grid control 栅控grid pulsing 栅极脉波法grid-bias 栅偏压grid-leak bias 栅漏偏压grid-voItage 栅压gridistor 隐栅管grill 格栅grin (graded index)陡度折度率GRIN lenses (graduated refractive index rod) GRIN 透镜grindability 可磨性grinder (1)磨床(2)磨工grinding 研磨grinding and polishing machinery 研磨与抛光机器grinding material 磨料grinding stone (1)砂轮(2)磨石grinding tool 磨具grindstone 天然磨石grit (1)研磨砂(2)粒度grond photogrammetry 地面摄影测量学grooring 划槽groove (1)槽(2)粒度groove form diffraction grating 槽形衍射光栅grooved pulley 槽轮gross area 总面积gross difference 总差gross tolerance 总公差gross weight 总重,毛重grossmeters 光泽度计ground absorption 地面吸收,大地吸收ground circle 基圆ground coat 底涂层ground colour 底色ground flat 研磨平面ground glass 磨砂玻璃,毛玻璃ground infrared target 地面红外目标ground laser locator designator 地面激光定位指示器ground laser radar 地面激光雷达ground level 基能级ground line 基线ground noise 本底噪声ground object 地面地标ground range 地面距离ground state 基态ground state assignment 基态分布ground state atom 基态原子ground state population 基态粒子数ground state relaxation 基态弛豫ground state speies 基态族ground truth 地表实况ground wire (1)群(2)基,组,族,团ground-based optical receiver 地面光学接收器ground-cathode amplifier 阴极接地放大器ground-echo pattern 地球反射波图样ground-excited level jump 基态激发能级跃迁ground-glass diffuser 毛玻璃漫射器ground-glass finder 毛玻璃寻像器ground-glass screen 毛玻璃屏ground-to-air laser ranging 地对空激光测距ground-to-ground laser ranging 接地线grounded-base amplifier 基极接地放大器grounded-collector amplifier 共集放大器grounded-emitter amplifier 共射放大器grounded-grid amplifier 栅极接地放大器grounded-plate amplifier 屏极接地放大器grounding conductor 接地导体group 群码group code 群延迟时间group delay time 脉冲群振荡器group index 群摄group modulation 群调变group pulse generator 组合振射效group shot 组合系统group system 群摄group theory 组合系统group velocity 郡论growing wave 增长波growith striation 生长辉纹growler 咆哮器grown junction 生长接面grown-junction photocell 生长-接面光电池grub screw 无头螺钉Grum recording spectroadiometer 格卢姆自动记录分光辐射谱仪grzig incidence telescope 掠入射望远镜GSGG GSAG laser crystals 雷射晶体(GSGG,GSAG)guard (1)防护(2)防謢装置guard wire 保护线gudden-pohl effect 卡登-波耳效应guidance (1)制导,导航(2)导槽guidance accuracy 制导准确度guidance beam 制导波束guidance control 制导控制guidance information 制导信息guidance package 制导组件guide (1)导向器(2)导轨(3)导槽guide bar 导杆guide curve 导向曲线guide face 导轨面guide grid 定向栅guide line 导线guide locating 导销guide number 闪光次数guide number letter scale 曝光指数等级guide pin 导销,定位销guide pulley 导轮,压带轮guide rod 导杆guide surface 导轨面guide track 导轨guide wavelength 导波长guide way (1)导轨(2)导向槽guided mode 导引模式guided ray 导向射线guided transmission 波导传输guided wave 导波guiding laser beam 制导激光束guiding microscope 引导显微镜guiding ocular 引导目镜guiding prism 引导棱镜Guinier focusing camera 纪尼埃聚焦照相机gum 树胶,树脂gun (1)抢,炮(2)电子枪(3)照相机镜头gun camera 枪炮照相机gun sight 枪炮瞄准镜gun-laying reticle 枪瞄准十字线gun-sight aiming point camera 枪炮瞄准装置Gunn effect oscillator 耿氏效应振荡器gunn errer 白恩效应guy wire 拉线gypsum 石膏gyration 回转gyrator 回转器,陀螺gyre 回转,旋转gyro 回转罗盘,陀螺仪gyro black assembly 回转组件gyro frequency 回转频率gyro horizon 回转地平仪gyro magnetic ratio 回磁比gyro sextant 回转六分仪gyro-level 回转水平仪gyrobearing 回转方位gyroclinometer 回转测斜仪gyrocompass 回转罗盘gyromagnetic effect 回磁效应gyromagnetic ratio 回磁比gyromagnetic spin system 回磁自旋系统gyrometer 回转测试仪gyropilot 回转驾驶仪,导航仪gyroscope 回转仪,陀螺gyroscopic camera mount 摄影机回转座gyroscopic clinmeter 回转测斜仪gyroscopic theodolite 回转经纬仪gyrosight 回转瞄准器gyrostabilizer 回转稳定器gyrostat 回转轮gyrosyn 回转感应同步罗盘gyrotron 振动回转器,振动陀螺仪gyrotropi crystal 旋光晶体gyrotropic bi-refringence 旋转变折射gyrotropy (1)旋转回归线(2)旋光性本文章由毛毛雨/收集整理。
09_AIAA_ga

2 MULTI-LINK SUSPENSION SYSTEM AND ITS DESIGN PROBLEM
As aforementioned, the reason why multi-link suspension systems are introduced mainly for high-grade cars is the high degree of design freedom for various function items. The essential difference between design problems for simple systems and ones for complicated systems is that in the former cases the mapping from design items to function items is relatively independent and it is possible to separately determine respective items, and that in the latter cases the interactions between all items are complicated as well as their structure and configuration and the tradeoff among function items is not straightforward. This tendency seems to have become more obvious under the up-to-date technologies that try to condense more functions into a certain size of a system. The above context can be found in the design problem of multi-link suspension systems used in automobiles. The fundamental functions of an automobile are to run straight, to turn and stop, and to run on both good and bad roads. That is, they consist of various operation modes. While there are a variety of suspension types (Dixon, 1996), their performance depends on both the selection of their types and the adjustment of their component link sizes. When focusing on a specific operation mode, the suspension geometry of simple types can be relatively easily determined to be ideal, since the relationship between link sizes and the specific function is straightforward. However, it is necessary to introduce complicated suspension types for realizing totally superior performance against all operation modes (Ushio et al., 1991), and the corresponding design problem of suspension geometry is not so easy due to the aforementioned nature of complicated systems design. Under these points, the multi-link suspension system that this paper is going to discuss is principally a parallel six-bar universal linkage. It is generally impossible to understand the immediate relationships between link sizes and respective function items. So, the conventional design situation requires many times of try-and-errors for finding a superior design solution. If the design problem can be mathematically formulated and the optimization algorithm suitable for its characteristics is organized, such a design method can be effective.
Autodesk Fusion 360 T-Splines Module教程说明书

Product Surfacing with T-Splines and Parametric Modeling ToolsFACULTY INDUSTRIAL DESIGN – WAYNE STATE UNIVERSITY****************.studioKuhnen.deClaas Eicke KuhnenA little bit about myself:Undergraduate degree in Color Design for Product and Graphic Design MFA in 3D Studio for Jewelry and Digital Animation I always have been very curious about 3D in general Faculty Industrial Design at Wayne State UniversityResearch Assistant in BioMedical Engineering studioKuhnen LLCFocus: Digital design tools and workflows for product development andrapid digital prototyping combining different programs into on cohesivedesign approach.BackgroundClass summaryDescription:This class will demonstrate a workflow that uses the T-Splines Module in Fusion 360 software to create NURBS-like surface patches based on existing sketches and sculpting the desired surface flows via CV direct modeling.The resulting boundary representations (BREPs) can be further manipulated with solid and surface modeling tools inside Fusion 360’s parametric timeline.The class will also focus on proper T-Spline mesh topology to improve resulting BREP patch layout quality.Key learning objectivesAt the end of this class, you will be able to:▪Create T-Splines surfaces via sketches and primitives▪Sculpting T-Spline surfaces and maintain proper topology layouts▪Use T-Splines with other modeling tools in the parametric timeline▪Understand best practices and parametric surfacing strategies▪Understand how to exchange data with other 3rd party applicationsNURBS vs T-Splines▪Precise▪Curvature graph▪Single 4 sided patch▪Poly surface for complex topology▪Insert isoprams or change degree while keeping the shape▪Cannot refine density locally (only on complete patch)▪To round edges fillet command has/ can to be used ▪Precise▪Curvature graph (with limitations)▪Single 4 sided patch and NGons▪Single surface for complex topology ▪Insert loop-cuts while keeping the exact shape▪Insert edge on a face where needed for local density change▪Fillets can be sculpted via edge loops and mesh topology on the fly▪Advantage:▪Clean light weight geometry▪Control over patch layout▪Disadvantage:▪Very labor intensive for smooth shapes▪Requires perfect profile layouts▪Design adjustments require manual sketch and surface re-alignments ▪Advantage:▪Incredible easy to sculpt▪Organic flows can be modeled with irregular topology layouts▪Disadvantage:▪Patch layout can get messy when T-Splines mesh count is high▪Achieving smooth curvature is harder than blending between NURBSsurfacesConclusionThink about T-Splines like NURBS:▪Think and treat T-Splines like NURBS that combines the best for NURBS andpolygon modeling together into one workflow▪Maintain slim mesh density like in a NURBS sculpting workflow▪But make use of mesh topology freedom from Sub-D modeling▪Then you have NURBS CV cage editing in Fusion 360Excited?So lets get started!▪Your class feedback is critical. Fill out a class survey now.▪Use the AU mobile app or fill out a class survey online.▪Give feedback after each session. ▪AU speakers will get feedback in real-time.▪Your feedback results in betterclasses and a better AU experience. How did I do?More Questions? Visit the AU Answer Bar ▪Seek answers to all of your technical productquestions by visiting the Answer Bar.Wednesday; 8am-4:30pm Thursday.▪Located outside Hall C, Level 2.▪Meet Autodesk developers, testers,& support engineers ready to helpwith your most challengingtechnical questions.Shape the future of Autodesk▪Connect one-on-one with product managers, designers, and researchers at the Idea Exchange.GoPro Sweepstakes.▪Open daily – Sessions average 20 minutes.No appointment necessary. Walk-ins welcome!▪Located outside Hall C, Level 2.▪View my contributor profile at AUonline for a list of all my classes.▪Learn more about me and see allmy contributions to Autodesklearning.▪Activate your own profile and startcontributing.▪Complete your profile while at AULas Vegas and Autodesk will makea donation on your behalf.See all my AU classes in one placeAutodesk is a registered trademark of Autodesk, Inc., and/or its subsidiaries and/or affiliates in the USA and/or other countries. All other brand names, product names, or trademarks belong to their respective holders. Autodesk reserves the right to alter product and services offerings, and。
SPIE-法国

Media PartnerPhotonics Europe 2008 · /pe · info@ · TEL: +44 29 2089 4747 12 Photonics Europe 2008 · /pe · info@ · TEL: +44 29 2089 4747SPIE Europe thanks the following sponsorsfor their generous supportAttendee Pens Stand #511www.micos.wsCoffee Breaks Stand #420www.klastech.deConference Bags Stand #Exhibitor Lounge Stand #Lanyards Stand #Pastries Stand #511www.micos.wsVertical Banner Stand #231www.hamamatsu.frExhibitor list as of 3 March 2008.AMA Association for Sensor Technology. . . . #209A.T. Wall Company. . . . . . . . . . . . . . . . . . . . . #224AFOP - French Optics and PhotonicsManufacturers Association . . . . . . . . . . . . #124AHF analysentechnik AG . . . . . . . . . . . . . . . . #316Alcatel Thales III V Lab. . . . . . . . . . . . . . . . . . #329AT -Fachverlag GmbH. . . . . . . . . . . . . . . . . . . #534Avantes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #232Becker & Hickl GmbH . . . . . . . . . . . . . . . . . . #405Bookham . . . . . . . . . . . . . . . . . . . . . . . . . . . . #317Breault Research Organization. . . . . . . . . . . . #117Brush Ceramic Products . . . . . . . . . . . . . . . . #104Carl Hanser Verlag . . . . . . . . . . . . . . . . . . . . . #530Cedrat Technologies. . . . . . . . . . . . . . . . . . . . #118CEIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #323CILAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #416Conerefringent Optics SL. . . . . . . . . . . . . . . . #508Crystal Fibre. . . . . . . . . . . . . . . . . . . . . . . . . . #306CST - Computer Simulation Technology . . . . #226CVI Melles Griot Ltd. . . . . . . . . . . . . . . . . . . . #507Draka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #230EDP Sciences. . . . . . . . . . . . . . . . . . . . . . . . . #532EKSPLA Co.. . . . . . . . . . . . . . . . . . . . . . . . . . #330Electro Optics Magazine . . . . . . . . . . . . . . . . #430Consortium. . . . . . . . . . . . . . . . . . . . . . . . . . . #331ePIXnet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #431Epner Technology, Inc.. . . . . . . . . . . . . . . . . . #423EQ Photonics GmbH . . . . . . . . . . . . . . . . . . . #223ET Enterprises Ltd . . . . . . . . . . . . . . . . . . . . . #328European Optical Society. . . . . . . . . . . . . . . . #536EuroPhotonics . . . . . . . . . . . . . . . . . . . . . . . . #100Fibercore Ltd.. . . . . . . . . . . . . . . . . . . . . . . . . #515Fibercryst . . . . . . . . . . . . . . . . . . . . . . . . . . . . #426FiberTech Optica Inc.. . . . . . . . . . . . . . . . . . . #415Fischer Connectors . . . . . . . . . . . . . . . . . . . . #122Flexible Optical BV. . . . . . . . . . . . . . . . . . . . . #514FRAMOS GmbH. . . . . . . . . . . . . . . . . . . . . . . #106Frank Optic Products GmbH . . . . . . . . . . . . . #105Fraunhofer Heinrich Hertz Institut . . . . . . . . . #321Fujian CASTECH Crystals, Inc. . . . . . . . . . . . #501Gorman-Rupp Industries . . . . . . . . . . . . . . . . #413GWU-Lasertechnik GmbH . . . . . . . . . . . . . . . #501Hamamatsu . . . . . . . . . . . . . . . . . . . . . . . . . . #231HC Photonics Corp . . . . . . . . . . . . . . . . . . . . #501Heptagon . . . . . . . . . . . . . . . . . . . . . . . . . . . . #521HOLOEYE Photonics AG . . . . . . . . . . . . . . . . #309HORIBA Jobin Yvon SAS. . . . . . . . . . . . . . . . #327id Quantique SA. . . . . . . . . . . . . . . . . . . . . . . #405Impex HighTech GmbH . . . . . . . . . . . . . . . . . #411Innolume GmbH. . . . . . . . . . . . . . . . . . . . . . . #115Institut d’Optique Graduate School . . . . . . . . #437International Society for Stereology. . . . . . . . #529iXFiber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #126KERDRY. . . . . . . . . . . . . . . . . . . . . . . . . . . . . #120Kimoga Material Technology Co., Ltd.. . . . . . #520KLASTECH. . . . . . . . . . . . . . . . . . . . . . . . . . . #420Laser Components GmbH. . . . . . . . . . . . . . . #220Laser Focus World . . . . . . . . . . . . . . . . . . . . . #414Laser Zentrum Hannover e.V . (LZH). . . . . . . . #505LEONI Fiber Optics GmbH. . . . . . . . . . . . . . . #406Leukos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #123LINOS Photonics France . . . . . . . . . . . . . . . . #307Lovalite. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #121Lumera Laser GmbH . . . . . . . . . . . . . . . . . . . #310Lumerical Solutions, Inc. . . . . . . . . . . . . . . . . #121M.C.S.E.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . #128Mad City Labs, Inc. . . . . . . . . . . . . . . . . . . . . #214Materials Today . . . . . . . . . . . . . . . . . . . . . . . #435Menlo Systems GmbH. . . . . . . . . . . . . . . . . . #517Exhibitor ListPhotonics Europe 2008 · /pe · info@ · TEL: +44 29 2089 47473T Advertiser Index Alcatel Thales III-V Lab. . . . . . . . . . . . . . . . . . . . . . . . . . . p. 11CVI Melles Griot Ltd. . . . . . . . . . . . . . . . . . . . . . . . . . . Cover 4ET Enterprises Ltd.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 23EPIC—European Photonics Industry Consortium . . . . . . p. 13KLASTECH—Karpushko Laser Technologies . . . . . . . . . p. 19LINOS Photonics France . . . . . . . . . . . . . . . . . . . . . . . . . p. 17Photoniques. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 5RSoft Design Group. . . . . . . . . . . . . . . . . . . . . . . . . . . Cover 2Space Light srl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 21Exhibition Floor PlanMesse Stuttgart . . . . . . . . . . . . . . . . . . . . . . . #524MICOS GmbH . . . . . . . . . . . . . . . . . . . . . . . . #511Nature Publishing Group . . . . . . . . . . . . . . . . #208NEMO (Network of Excellence onMicro-Optics). . . . . . . . . . . . . . . . . . . . . . . #217New Focus, Inc. . . . . . . . . . . . . . . . . . . . . . . . #317Newport Spectra-Physics . . . . . . . . . . . . . . . #205NEYCO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #212NIL Technology. . . . . . . . . . . . . . . . . . . . . . . . #125NP Photonics . . . . . . . . . . . . . . . . . . . . . . . . . #501Nufern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #428NuSil Technology . . . . . . . . . . . . . . . . . . . . . . #525Ocean Optics . . . . . . . . . . . . . . . . . . . . . . . . #110OLLA Project . . . . . . . . . . . . . . . . . . . . . . . . . #429Omega Optical, Inc.. . . . . . . . . . . . . . . . . . . . #107OpTIC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #333Optics & Laser Europe . . . . . . . . . . . . . . . . . . #312Optics Pages . . . . . . . . . . . . . . . . . . . . . . . . . #527OptiGrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . #510Optima Research . . . . . . . . . . . . . . . . . . . . . . #131OptoIndex. . . . . . . . . . . . . . . . . . . . . . . . . . . . #531Opton Laser International. . . . . . . . . . . . . . . . #130Optronis GmbH . . . . . . . . . . . . . . . . . . . . . . . #216OXXIUS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #304Phoenix BV. . . . . . . . . . . . . . . . . . . . . . . . . . . #315Photon Design . . . . . . . . . . . . . . . . . . . . . . . . #204Photonex 2008. . . . . . . . . . . . . . . . . . . . . . . . #527Photonic Cleaning Technologies . . . . . . . . . . #421Photonics 4 Life - Network of Excellence . . . #427Photonics Spectra - Laurin Publishing. . . . . . #100Photonik Zentrum Hessen in Wetzlar AG. . . . #222Physik Instrumente (PI) GmbH & Co.. . . . . . . #308Point Source. . . . . . . . . . . . . . . . . . . . . . . . . . #113Quantel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #305Raicol Crystals Ltd. . . . . . . . . . . . . . . . . . . . . #206Rhenaphotonics Alsace . . . . . #533, 535, 537, 539Royal Society of Chemistry . . . . . . . . . . . . . . #541RSoft Design Group. . . . . . . . . . . . . . . . . . . . #320RSP Technology BV . . . . . . . . . . . . . . . . . . . . #424Santec Europe Ltd.. . . . . . . . . . . . . . . . . . . . . #409Scientec . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #412SEDI Fibres Optiques. . . . . . . . . . . . . . . . . . . #313SEMELAB PLC. . . . . . . . . . . . . . . . . . . . . . . . #109Sill Optics GmbH & Co., KG. . . . . . . . . . . . . . #221SIOF-Italian Society of Optics and Photonics #516Space Light srl . . . . . . . . . . . . . . . . . . . . . . . . #518Spectroscopy Magazine. . . . . . . . . . . . . . . . . #433SphereOptics GmbH . . . . . . . . . . . . . . . . . . . #504Spiricon GmbH. . . . . . . . . . . . . . . . . . . . . . . . #419Springer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #211Stanford Computer Optics GmbH . . . . . . . . #114bTaylor & Francis - Contemporary Physics . . . #528Taylor & Francis - Fiber and Integrated Optics #528Taylor & Francis - Informa UK Ltd.. . . . . . . . . #528Taylor & Francis - International Journal ofOptomechatronics. . . . . . . . . . . . . . . . . . . #528Taylor & Francis - Journal of Modern Optics . #528THALES Laser . . . . . . . . . . . . . . . . . . . . . . . . #506The Institution of Engineering andTechnology (IET) . . . . . . . . . . . . . . . . . . . . #425Thorlabs GmbH . . . . . . . . . . . . . . . . . . . . . . . #517TSP Diffusion . . . . . . . . . . . . . . . . . . . . . . . . . #417UCM AG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . #116Unice E-O Services Inc.. . . . . . . . . . . . . . . . . #422Universal Photonics, Inc. . . . . . . . . . . . . . . . . #207VTT Technical Research Centre of Finland. . . #129Wiley-VCH GmbH & Co. KGaA . . . . . . . . . . . #523Xiton Photonics GmbH. . . . . . . . . . . . . . . . . . #501XLITH GmbH . . . . . . . . . . . . . . . . . . . . . . . . . #432Yole Développement . . . . . . . . . . . . . . . . . . . #225ZODIAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . #322Photonics Europe 2008 · /pe · info@ · TEL: +44 29 2089 4747 5The French magazine specializing in Optics-Photonics Photoniques :the magazine of theFrench Optical CommunityPhotoniques,magazine of the French OpticalSociety,establishes links and partnerships betweenall the entities working in Optics-Photonics :at national level with AFOP (French ManufacturersAssociation in Optics and Photonics)and in eachregion of France.Photoniques :The source of information for all the professionals in thefield of Optics-Photonics in France.In each issue :industry news,technical articles written by specialists,new products…A useful and efficient circulation :7500copiesAfter 7years of existence,cooperation and networking withthe specialists of the optic world in France,Photoniques hasbuilt a large qualified database of potential users :researchers,technicians,engineers and managers,fromindustry such as communications,industrial vision,lasers,test and measurements,imaging/displays…Are you interested in the French optics and photonics markets?Photoniques is your partner!How to keep you informed about Optics-Photonics in France?Become a Photoniques reader!123For additionnal information,contact:Olga Sortais :+33134042144o.sortais@ to request an issue of Photoniques and a media kit6 Photonics Europe 2008 · /pe · info@ · TEL: +44 29 2089 4747As a new addition to Photonics Europe, the Industry PerspectivesProgramme will provide a series of executive briefi ngs coveringkey technologies and sectors.Come hear key members of Europe’s photonics industrydiscuss their successes, future plans and the way in which theyintend to maximize their market penetration and growth. Hearreviews of the European Innovation landscape highlightinggeographical areas of strengths in areas such as business R&D,knowledge transfer and demonstrate the outcomes from recentsuccessful European-funded industry programmes.Industry Perspectives Programme Included with Conference registration.Individual Sessions can be purchased at the Cashier. Individual sessions, €100. The sessions will deliver a strategic perspective into each application area, allowing you to uncover and confirm the future prospects for your business. Benchmark your aspirations for your business and technology against some of Europe’s leading companies and engage with them as a potential supplier or partner. You will hear presentations from Philips, Audi, PCO, Coherent Scotland, GlaxoSmithKline, Carl Zeiss, Yole Development, Koheras and Fraunhofer on their successes and strategic priorities. Tuesday 8 April Morning SessionPhotovoltaics10.15 to 10.45 hrs.Photovoltaics - Market and Technology TrendsGaëtan Rull, Market Analyst for New Energy Technologies,Yole Développement 10.45 to 11.15 hrs.High Throughput Manufacturing for BulkHeterojunction PVsMarkus Scharber, Head of Materials Group, Konarka 11.15 to 11.45 hrs.Managing JGrowth in the Production of Thin Films(To be confi rmed.)Dr. Immo Kotschau, Director of Research and Development,Centrotherm GmbH 11.45 to 12.30 hrs.End to End Mass Production of Silicon Thin FilmModulesDetlev Koch, Head of BU Solar Thin Films & Senior Vice President,O C Oerlikon Balzers AG Break – 12.30 to 14.00 hrs.Afternoon SessionMEMS/MOEMS14.00 to 14.30 hrs.Market Trends and Technical Advances in M(O)EMSDr. Eric Mounier, Manager for MEMS & Optoelectronics andMicronews Chief Editor, Yole Développement14.30 to 15.00 hrs.Inorganic/Organic Hybrid Polymers (ORMOCER) forOptical InterconnectsDr. Michael Popall, Head of Microsystems and Portable PowerSupply, Fraunhofer ISC15.00 to 15.30 hrs.Future MOEMS and Photonic MicrosystemsDr. Thomas Hessler, Director Axetris, Leister Process Technologies15.30 to 16.15 hrs.Innovations in MOEMS product developmentProf. Hubert Karl, Director, Fraunhofer IPMSWednesday 9 AprilMorning Session Multimedia, Displays and Lighting 10.15 to 10.45 hrs.Plasmonics for Photonics: Challenges and Opportunities Ross Stanley, Section Head: MOEMS & Nanophotonics, CSEM 10.45 to 11.15 hrs.Photonic Microsystems for Displays Edward Buckley, VP Business Development, Light Blue Optics Ltd.11.15 to 11.45 hrs.Matrix-Beam – the antiglaring LED-high beam Benjamin Hummel, Research for Concept Lighting T echnologies, Audi 11.45 to 12.30 hrs.High Brightness OLEDs for Next Generation LightingPeter Visser, Project Manager, OLLA Project, The Netherlands Break –12.30 to 14.00 hrs.Photonics Europe 2008 · /pe · info@ · TEL: +44 29 2089 4747 7Thursday 10 AprilMorning SessionImaging10.15 to 10.45 hrs.High Resolution Imaging detectors for invisiblelight –Development and IndustrialisationHans Hentzell, CEO, Acreo10.45 to 11.15 hrs.(Presentation to be confi rmed.)11.15 to 11.45 hrs.Raman Spectroscopy, Raman Imaging and FutureTrendsSopie Morel, Sales Manager, Molecular & Microanalysis Division,HORIBA Jobin Yvon 11.45 to 12.30 hrs.World Markets for Lasers and Their Application Steve Anderson, Associate Publisher/Editor-in-Chief,Laser Focus World Break – 12.30 to 14.00 hrs. Afternoon SessionBiomedical and Healthcare Photonics 14.00 to 14.30 hrs.Photonic Systems for Biotechnology Research Karin Schuetze, Director of R&D, Carl Zeiss Microimaging 14.30 to 15.00 hrs.Photonics 4 Life Prof. Jeürgen Popp, Director, IPHT Germany 15.00 to 15.30 ser System Development for Biophotonics Chris Dorman, Managing Director, Coherent Scotland15.30 to 16.15 hrs.Supercontinuum Light - a paradigm shift in lasersources for biophotonicsJakob Dahlgren Skov, CEO, Koheras Husain Imam, Business Development Manager, Koheras Industrial Perspectives ProgrammeWednesday 9 April Afternoon Session OPERA 2015: European Photonics - Corporate and Research Landscape 13.30 to 13.45 hrs.Optics and Photonics in the 7th Framework ProgrammeGustav Kalbe, Head of Sector - Photonics, Information Society andMedia, Directorate General, European Commission 13.45 to 14.00 hrs.OPERA 2015: Aims, Results and link to Photonics 21Markus Wilkens, VDI 14.00 to 14.20 hrs.European Photonics Industry Landscape Bart Snijders, TNO 14.20 to 14.40 hrs.European Photonics Research Landscape Marie-Joëlle Antoine, Optics Valley 14.40 to 15.00 hrs.Resources for Photonics Development Peter Van Daele, IMEC Break – 15.00 to 15.15 hrs. 15.15 to 15.35 hrs.Towards the Future on Optics and Photonics ResearchDr. Eugene Arthurs, SPIE Europe (UK)15.35 to 16.15 hrs.Strategic Opportunities for R&D in EuropeMike Wale, Bookham, UK16.15 to 16.45 hrs.A Sustainable Business Model for Optics andPhotonicsDavid Pointer, Managing Director, Point Source (Pending)16.45 to 17.15 hrs.Final Open DiscussionChaired by: Gustav Kalbe, Head of Sector - Photonics, InformationSociety and Media, Directorate General, European Commission8Photonics Europe 2008 · /pe · info@ · TEL: +44 29 2089 4747Photonics Innovation Village Tuesday to Thursday during Exhibition HoursThe Photonics Innovation Village will showcase the latest projects and breakthroughs from optics-photonics researchers at universities, research centres and start-up companies. This is a great opportunity to see how EU R&D and project funds are being used by some of the great young innovators in Europe.A window on creative products developed by universities and research centres. Under the patronage of the European Commission, fi fteen entrants from across Europe complete to win categories ranging from Best Marketability to Best Design, Best Technology, and Best Overall Product.Low power remote sensing system Y. A. Polkanov, Russia (Individual work)New approach is based on use of a low-power radiation source with specifi ed gating, when time of source radiation interruption is equal to a pulse duration of ordinary lidar. We propose to reconstruct the average values of these characteristics over the parts commensurable with the sounding path length. As scanning systems is offered with speed of circular scanning is determined by time of small linear moving of a laser beam. It allows to predict a reduction of the meteorological situation stability from an anticipatory change of the revealed structure character of optical heterogeneities of a atmosphere ground layer atmosphere.Point of care sensor for non-invasive multi-parameter diagnostics of blood biochemistry Belarusian State University, Belarus; Ruhr-Universität-Bochum, Germany; Second Clinical Hospital, Belarus Compact fi bre optical and thermal sensor for noninvasive measurement of blood biochemistry including glucose, hemoglobin and its derivatives concentrations is developed as a prototype of the point-of-care diagnosticdevices for cardiologic, tumour and diabetic patients. Integrated platform for data acquisition, data processing and communication to remote networks has been developed on the pocket PC.Polarization-holographic gratings and devices on their basisLaboratory of Holographic Recording & Processing of Information, Institute of Cybernetics, GeorgiaWe have developed the technology of obtaining of polarization-holographic gratings that have anisotropic profi le continuously changing within each spatial period and also the technology of obtaining of polarization-holographic elements on the basis of such gratings. Special highly effective polarization-sensitive materials developed by us are used for obtaining such gratings and elements. We can present samples of gratings and elements and give a demonstration of their work.Ultra-miniature omni-view camera moduleImage Sensing group of the Photonics Division of CSEM (Centre Suisse d’Electronique et de Microtechnique), SwitzerlandA live demonstration with a working prototype of a highly integrated ultra-miniature camera module with omni-directional view dedicated to autonomous micro fl ying devices is presented.Femtosecond-pulse fi bre laser for microsurgery and marking applicationsMultitel, BelgiumMultitel presents a new prototype of an all-fi bred femtosecond amplifi ed laser. The device has been specifi cally developed for micromachining and microsurgery applications and operates at 1.55µm, which corresponds to a high absorption peak of water (molecule contained in large quantity in living tissue and cells). Since no free-space optics is used for pulse compression or amplifi cation the prototype is compact and very stable. Moreover, the seed laser source has a high repetition rate therefore enabling multiphoton absorption applications and use in multi-pulse and burst modes.Flexible artifi cial optical robotic skinsDepartment of Applied Physics and Photonics (VUB-TONA) and Robotics & Multibody Mechanics Research Group (VUB-R&MM) of the Vrije Universiteit Brussel, Belgium; Thin Film Components Group (UG-TFCG) and Polymer Chemistry & Biomaterials Research Group (UG-PBM) of the Universiteit Gent, BelgiumWe will present a paradigm shifting application for optical fi bre sensors in the domain of robotics. We propose fi bre B ragg gratings (FB Gs) written in highly-birefringent microstructured optical fi bres integrated in a fl exible skin-like foil to provide a touch capability to a social pet-type robot for hospitalized children named “Probo”. The touch information is complementary to vision analysis and audio analysis and will be used to detect where Probo is being touched and to differentiate between different types of affective touches such as tickling, poking, slapping, petting, etc.Co-Sponsored by: Location: Galleri de Marbre Under the patronage of the European Commission, Photonics Unit Join us for the Photonics Innovation Village Awards 2008 which will take place on Wednesday, 9th April 2008, from 17.00 hrs. in the Galerie de Marbre.3D tomographic microscopeLauer Technologies, FranceThe 3D tomographic microscope generates 3D high-resolution images of non-marked samples. The demonstration will show 3D manipulation of images obtained with this microscope.Polar nephelometerInstitute of Atmospheric Optics of Tomsk, RussiaMaterial comprising a matrix, apatite and at least one europium composite compound with particle medium sizes more 4-5 micron. The composition for the production of the material comprises (wt. %) apatite 0.01-10.0; composite compound. 0.01-10.0, and the balance is a matrix-forming agent, such as a polymer, a fibre, a glass-forming composition, or lacquer/adhesive-forming substance.High speed Stokes portable polarimeterMIPS Laboratory of the Haute Alsace University, FranceThe implementation of an imaging polarimeter able to capture dynamic scenes is presented. Our prototype is designed to work at visible wavelengths and to operate at high-speed (a 360 Hz framerate was obtained), contrary to commercial or laboratory liquid crystal polarimeters previously reported. It has been used in the laboratory as well as in a natural environment with natural light. The device consists of commercial components whose cost is moderate. The polarizing element is based on a ferroelectric liquid crystal modulator which acts as a half-wave plate at its design wavelength.Diffractive/refractive endoscopic UV-imaging system Institut für Technische Optik (ITO) of the University of Stuttgart, GermanyWe present a new optical system with an outstanding high performance despite of demanding boundary conditions of endoscopic imaging to enable minimal invasive laser-based measurement techniques. For this purpose the system provides a high lens speed of about 10 times the value of a conventional UV-endoscope, a multiple broad band chromatic correction and small-diameter but wide-angle access optics. This was realized with a new design concept including unconventional, i.e. diffractive components. An application are UV-LIF-measurements on close-to-production engines to speed up the optimization of the combustion and produce aggregates with less fuel consumption and exhaust gases like CO2.Light-converting materials and composition: polyethylene fi lm for greenhouses, masterbatch, textile, sunscreen and aerosolUsefulsun Oy, Finland; Institute Theoretical and Experimental Biophysics Russian Academy of Sciences, RussiaThe composition for the production of the material comprises (wt. % ) composite compound (inorganic photoluminophore particles with sizes 10-800nm) -0.01-10.0; coordination compound of metal E (the product of transformation of europium, samarium, terbium or gadolinium ) - 0,0-10,0 and the balance is a matrix-forming agent, such as, a polymer, a fi ber, a glass-forming composition or gel, aerosol, lacquer/adhesive-forming substance. The present invention relates to composite materials, in particular to light-converting materials used in agriculture, medicine, biotechnology and light industry.HIPOLAS - a compact and robust laser sourceCTR AG (Carinthian Tech Research AG), AustriaThe prototype covers a robust, compact and powerful laser ignition source for reciprocating gas and petrol engines that could be mounted directly on the cylinder.We have developed a diode pumped solid-state laser with a monolithic Neodymium YAG resonator core. A ring of 12 high power laser diodes pumps the resonator. Due to the adjustment-free design, the laser is intrinsically robust to environmental vibrations and temperature conditions. With overall dimensions of Æ 50 x 70 mm the laser head is small enough to be fi tted at the standard spark plug location on the cylinder head. The dimensions can be reduced for future prototypes. OLLA OLED lighting tile demonstratorOLLA project-consortiumOLED technology is not only a display technology but also suited for lighting purposes. The OLLA project has the goal to demonstrate viability of OLED technology for general lighting applications. The demonstrator tile shown here combines the current results of the project : a large sized (15x15cm2) white OLED stack with high effi cacy (up to 50 lm/W), combined with long lifetime (>10.000 hours).During Photonics Europe, we will show several OLEDs tiles in different colors. The demonstrators are made by the OLLA project-consortium members. The large OLED demonstrator tile was fabricated on the inline tool at Fraunhofer IPMS in Dresden.Analyze-IQNanoscale Biophotonics Laboratory, School of Chemistry,and Machine Learning / Data Mining Group, Department ofInformation Technology, National University of Ireland, Galway, IrelandAnalyze-IQ is the next generation spectral analysis software tool for optical and molecular spectroscopies such as Raman, Mid-IR, NIR, and Fluorescence. The Analyze-IQ software is based on patented machine-learning algorithms and a model based approach in which the software learns to recognise the relevant information in complex mixtures from sample spectra. It then uses these models to rapidly and accurately identify or quantify unknown materials such as narcotics and explosives, in complex mixtures commonly found in law-enforcement and industrial applications.Micro-optical detection unit for lab-on-a-chipDepartment of Applied Physics and Photonics (VUB-TONA) of the Vrije Universiteit Brussel, BelgiumWe present a detection unit for fl uorescence and UV-VIS absorbance analysis in capillaries, which can be used for chromatography. By usinga micro-fabrication technology (Deep Proton Writing) the optics aredirectly aligned onto the micro-fl uidic channel. This integration enables the development of portable and ultimately disposable lab-on-a-chip systems for point-of-care diagnosis. We will explain the working principle of our detection system in a proof-of-concept demonstration set-up while focusing on some specifi c applications of micro-fl uidics in low-cost lab-on-a-chip systems.Photonics Innovation Village。
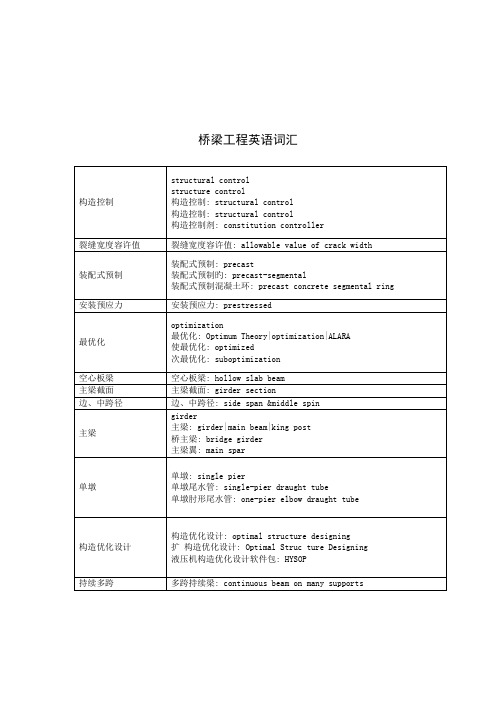
桥梁工程英语专业词汇
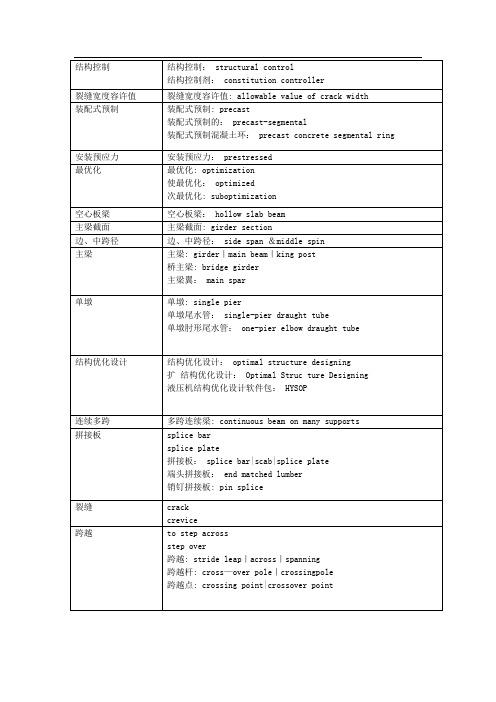
轴向拉力, 轴向拉伸: axial tension
轴向拉力 轴向张力: axialtensileforce
承台
cushion cap
承台: bearing platform|cushioncap|pile caps
桩承台: pile cap|platformonpiles
弹性
elasticity
springiness
spring
give
flexibility
弹性: elasticity|Flexibility|stretch
彈性: Elastic|Elasticidad|弾性
弹性体: elastomer|elastic body|SPUA
平ቤተ መጻሕፍቲ ባይዱ面假定
plane cross-section assumption
主梁
主梁: girder|main beam|king post
桥主梁: bridge girder
主梁翼: main spar
单墩
单墩: single pier
单墩尾水管: single-pier draught tube
单墩肘形尾水管: one-pier elbow draught tube
结构优化设计
刚强度: stiffness|stiffne|westbank stiffness
光强度: light intensity|intensity
箍筋
hooping
箍筋: stirrup|reinforcement stirrup|hooping
箍筋柱: tied column|hooped column
桥梁工程英语词汇
fiduciary level
可靠度: Reliability|degree of reliability
不可靠度: Unreliability
高可靠度: High Reliability
几何特性
geometrical characteristic
几何特性: geometrical characteristic
预应力混凝土
prestressed concrete
预应力混凝土: prestressed concrete|prestre edconcrete
预应力混凝土梁: prestressed concrete beam
预应力混凝土管: prestressed concrete pipe
预应力钢筋束
预应力钢筋束: pre-stressing tendon|pre-stre ingtendon
刚构桥
rigid frame bridge
刚构桥: rigid frame bridge
形刚构桥: T-shaped rigid frame bridge
持续刚构桥: continuous rigid frame bridge
刚度比
stiffness ratio
ratio of rigidity
刚度比: ratio of rigidity|stiffness ratio
有限元分析
finite element analysis
有限元分析: FEA|finite element analysis (FEA)|ABAQUS
反有限元分析: inverse finite element analysis
有限元分析软件: HKS ABAQUS|MSC/NASTRAN MSC/NASTRAN
Geometric Modeling
Geometric ModelingGeometric modeling is a crucial aspect of computer graphics and design,playing a significant role in various industries such as architecture, engineering, and animation. It involves creating digital representations of objects and environments using mathematical and computational techniques. This process allows for the visualization, analysis, and manipulation of complex geometric shapes, ultimately contributing to the development of innovative products and designs. However, like any technological field, geometric modeling presents its own set of challenges and limitations that need to be addressed. One of the primary challenges in geometric modeling is the accurate representation of real-world objects and environments. Achieving precise and realistic depictions requires a deep understanding of mathematical concepts such as curves, surfaces, and solids. Additionally, the integration of texture, lighting, and shading furthercomplicates the process, as these elements contribute to the overall visual appeal and authenticity of the model. As a result, geometric modelers often face the daunting task of balancing mathematical precision with aesthetic quality, striving to create visually appealing representations that accurately reflect the physical world. Moreover, the scalability of geometric modeling presents anothersignificant challenge. As the complexity and size of models increase, so does the computational demand required for their creation and manipulation. This can leadto performance issues, particularly in real-time applications such as video games and virtual simulations. To address this challenge, geometric modelers must constantly innovate and optimize their techniques to ensure that large-scale models can be efficiently handled and rendered without compromising quality. In addition to technical challenges, geometric modeling also raises ethical considerations, particularly in the context of virtual reality and simulation. The ability to create highly realistic and immersive environments has the potential to blur the lines between the virtual and physical worlds, raising questions aboutthe ethical use of such technology. For instance, the creation of lifelike simulations for training or entertainment purposes may have unintended psychological effects on users, blurring their perception of reality. As such, itis crucial for geometric modelers to consider the ethical implications of theirwork and strive to use their skills responsibly. Despite these challenges, the field of geometric modeling continues to evolve, driven by advancements in technology and the increasing demand for realistic digital representations. Innovations such as 3D scanning and printing have revolutionized the way geometric models are created, allowing for the direct conversion of physical objects into digital form. Additionally, the integration of artificial intelligence and machine learning has the potential to streamline the modeling process, automating repetitive tasks and enabling more efficient creation of complex geometries. Ultimately, the future of geometric modeling holds great promise, as it continues to push the boundaries of what is possible in the digital realm. By addressing the challenges and ethical considerations inherent to the field, geometric modelers can harness the full potential of their craft, contributing to the creation of captivating virtual worlds, groundbreaking designs, and innovative technological solutions. As technology continues to advance, the role of geometric modeling will only become more prominent, shaping the way we interact with and perceive the world around us.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Product Geometric Crossover for the Sudoku PuzzleAlberto Moraglio Dept.of Computer Science University of Essex,UK amoragn@Julian TogeliusDept.of Computer ScienceUniversity of Essex,UKjtogel@Simon LucasDept.of Computer ScienceUniversity of Essex,UKsml@Abstract—Geometric crossover is a representation-independent definition of crossover based on the distance of the search space interpreted as a metric space.It generalizes the traditional crossover for binary strings and other important recombination operators for the most used representations. Using a distance tailored to the problem at hand,the abstract definition of crossover can be used to design new problem specific crossovers that embed problem knowledge in the search.In recent work,we have introduced the important notion of product geometric crossover that enables the construction of new geometric crossovers combining pre-existing geometric crossovers in a simple way.In this paper,we use it to design an evolutionary algorithm to solve the Sudokupuzzle.The different types of constraints make Sudoku an interesting study case for crossover design.We conducted extensive experimental testing and found that,on medium and hard problems,the new geometric crossovers perform significantly better than hill-climbers and mutations alone. Keywords:Theory,Operators,Representations,Games, SudokuI.I NTRODUCTIONGeometric crossover[6]is a representation-independent recombination operator defined over the distance of the search rmally,geometric crossover requires the offspring to lie between parents.Geometric crossover generalizes many pre-existing re-combination operators for the major representations used in evolutionary algorithms,such as binary strings[6],real vectors[6],permutations[7][9],syntactic trees[8]and sequences[10].They are defined in geometric terms using the notions of line segment and ball.These notions and the corresponding genetic operators are well-defined once a notion of distance in the search space is well-defined.This way of defining search operators as function of the search space is opposite to the standard way[3]in which the search space is seen as a function of the search operators employed.This viewpoint greatly simplifies the relationship between search operators andfitness landscape and has allowed us to give simple rule-of-thumbs to build/choose crossover operators for the problem at hand that are likely to perform well.Using the abstract definition of geometric crossover and choosing a distancefirmly rooted in the syntax of the solution representation as the basis for geometric crossover,one can derive new crossovers for any representation.So far we have proven that a number of important pre-existing recombination operators for the most used repre-sentations are geometric crossovers(geometricity by anal-ysis).We have also applied the abstract definition of ge-Fig.1.Example of Sudoku puzzle.ometric crossover to distancesfirmly rooted in a specific solution representation and designed brand-new crossovers (geometricity by construction).An appealing way to build new geometric crossovers is starting from recombination operators that are known to be geometric and derive new geometric crossovers by geometricity-preserving transforma-tions/combinations that when applied to geometric crossovers return geometric crossovers(geometricity by derivation). The cartesian product of geometric crossover allows the construction of new geometric crossovers combining preex-isting geometric crossovers in a very simple way.Given a number of representations and relative geometric crossovers, the geometric crossover for the compound representation tak-ing the shape of a vector of a number of basic representations is the compound recombination operator that applies to each representation in the vector its relative geometric crossover. The distance associated with the product crossover is simply the sum of the distances of the composing crossovers. Sudoku is a logic-based placement puzzle.The aim of the puzzle is to enter a digit from1through9in each cell of a 9x9grid made up of3x3subgrids(called“regions”),starting with various digits given in some cells(the“givens”).Each row,column,and region must contain only one instance of each digit.Infig1we show an example Sudoku puzzle. Sudoku puzzles with a unique solution are called proper sudoku,and the majority of published grids are of this type. Published puzzles often are ranked in terms of difficulty. Perhaps surprisingly,the number of givens has little or no bearing on a puzzle’s difficulty.It is based on the relevance and the positioning of the numbers rather than the quantity of the numbers.The9x9Sudoku puzzle of any difficulty can be solved very quickly by a computer.The simplest way is to use somebrute force trial-and-error search employing back-tracking. Constraint programming is a more efficient method that ap-plies the constraints successively to narrow down the solution space until a solution is found or until alternate values cannot otherwise be excluded,in which case backtracking is applied.A highly efficient way of solving such constraint problems is the Dancing Links Algorithm,by Donald Knuth[4]. The general problem of solving Sudoku puzzles on n2×n2 boards of n x n blocks is known to be NP-complete[12]. This means that,unless P=NP,the exact solution methods that solve very quickly the9x9boards take exponential time in the board size in the worst case.However,it is unknown weather the general Sudoku problem restricted to puzzles with unique solutions remains NP-complete or becomes polynomial.Solving Sudoku puzzles can be expressed as a graph coloring problem.The aim of the puzzle in its standard form is to construct a proper9-coloring of a particular graph,given a partial9-coloring.A valid Sudoku solution grid is also a Latin square. Sudoku imposes the additional regional tin square completion is known to be NP-complete.A further relaxation of the problem allowing repetitions on columns (or rows)makes it polynomially solvable.Admittedly evolutionary algorithms are not the best tech-nique to solve Sudoku because they do not exploit systemat-ically the problem constraints to narrow down the search. However,Sudoku is an interesting study case because it is a relatively simple problem but not trivial since is NP-complete,and the different types of constraints make Sudoku an interesting playground for crossover design.In particular, its structure makes it a perfect candidate for product geomet-ric crossover.In this paper we use the geometric framework and its extension to the cartesian product of geometric crossover,to design an evolutionary algorithm to solve the Sudoku puzzle. We report extensive experimental results.The paper is organized as follows.In section2we present the geometric framework and its extension to product ge-ometric crossover.In section3,we design new geometric crossovers tailored to Sudoku using the product geometric crossover.In section4,we introduce a new heuristic logic-based mutation built for Sudoku.In section5,we test experimentally our new search operators.In section6,we draw conclusions.II.G EOMETRIC FRAMEWORKA.Geometric preliminariesIn the following we give necessary preliminary geometric definitions.The following definitions are taken from[1]. The terms distance and metric denote any real valued function that conforms to the axioms of identity,symme-try and triangular inequality.A simple connected graph is naturally associated to a metric space via its path metric:the distance between two nodes in the graph is the length of a shortest path between the nodes.Similarly,an edge-weighted graph with strictly positive weights is naturally associated to a metric space via a weighted path metric.In a metric space(S,d)a closed ball is the set of the form B(x;r)={y∈S|d(x,y)≤r}where x∈S and r is a positive real number called the radius of the ball.A line segment(or closed interval)is the set of the form [x;y]={z∈S|d(x,z)+d(z,y)=d(x,y)}where x,y∈S are called extremes of the segment.Metric ball and metric segment generalize the familiar notions of ball and segment in the Euclidean space to any metric space through distance redefinition.These generalized objects look quite different under different metrics.Notice that a metric segment does not coincide to a shortest path connecting its extremes(geodesic) as in an Euclidean space.In general,there may be more than one geodesic connecting two extremes;the metric segment is the union of all geodesics.We assign a structure to the solution set by endowing it with a notion of distance d.M=(S,d)is therefore a solution space and L=(M,g)is the correspondingfitness landscape,where g is thefitness function over S.Notice that d is arbitrary and need not have any particular connection or affinity with the search problem at hand.B.Geometric crossover definitionThe following definitions are representation-independent therefore crossover is well-defined for any representation.It is only function of the metric d associated with the search space being based on the notion of metric segment.Definition1:(Image set)The image set Im[OP]of a genetic operator OP is the set of all possible offspring produced by OP with non-zero probability.Definition2:(Geometric crossover)A binary operator is a geometric crossover under the metric d if all offspring are in the segment between its parents.Definition3:(Uniform geometric crossover)Uniform ge-ometric crossover UX is a geometric crossover where all z laying between parents x and y have the same probability of being the offspring:f UX(z|x,y)=δ(z∈[x;y])|[x;y]|Im[UX(x,y)]={z∈S|f UX(z|x,y)>0}=[x;y].A number of general properties for geometric crossover and mutation have been derived in[6].Result:traditional crossover is geometric under Hamming distance.C.Geometric crossover for permutationsIn previous work we have studied various crossovers for permutations,revealing that PMX[2],a well-known crossover for permutations,is geometric under swap distance. Also,we found that Cycle crossover[2],another traditional crossover for permutations,is geometric under swap distance and under Hamming distance(geometricity under Hamming distance for permutations implies geometricity under swapdistance but not vice versa).Finally,we showed that geomet-ric crossovers for permutations based on edit moves are nat-urally associated with sorting algorithms:picking offspring on a minimum path between two parents corresponds to picking partially sorted permutations on the minimal sorting trajectory between the parents.D.Geometric crossover landscapeGeometric operators are defined as functions of the dis-tance associated with the search space.However,the search space does not come with the problem itself.The problem consists only of afitness function to optimize,that defines what a solution is and how to evaluate it,but it does not give any structure on the solution set.The act of putting a structure over the solution set is part of the search algorithm design and it is a designer’s choice.Afitness landscape is thefitness function plus a structure over the solution space.So,for each problem,there is onefitness function but as manyfitness landscapes as the number of possible different structures over the solution set.In principle,the designer could choose the structure to assign to the solution set completely independently from the problem at hand. However,because the search operators are defined over such a structure,doing so would make them decoupled from the problem at hand,hence turning the search into something very close to random search.In order to avoid this one can exploit problem knowledge in the search.This can be achieved by carefully designing the connectivity structure of thefitness landscape.For example, one can study the objective function of the problem and select a neighbourhood structure that couples the distance between solutions and theirfitness values.Once this is done problem knowledge can be exploited by search operators to perform better than random search,even if the search operators are problem-independent(as in the case of geometric crossover and mutation).Under which conditions is a landscape well-searchable by geometric operators?As a rule of thumb,geometric mutation and geometric crossover work well on landscapes where the closer pairs of solutions,the more correlated theirfitness values.Of course this is no surprise:the importance of landscape smoothness has been advocated in many different contexts and has been confirmed in uncountable empirical studies with many neighborhood search meta-heuristics[11]. Rule-of-thumb1:if we have a good distance for the problem at hand than we have good geometric mutation and good geometric crossoverRule-of-thumb2:a good distance for the problem at hand is a distance that makes the landscape“smooth”E.Product geometric crossoverIn recent work[5]we have introduced the notion of product geometric crossover.Theorem1:Cartesian product of geometric crossover is geometric under the sum of distancesThis theorem is very interesting because it allows one to build new geometric crossovers by combining crossovers that are known to be geometric.In particular,this applies to crossovers for mixed representations.The compounding geometric crossovers do not need to be independent,for the cartesian crossover to be geometric:•Multi-crossover:same representation,same crossover n times•Hybrid crossover:same representation,different crossover for each projection•Hybrid representation crossover:different representa-tion for each projection(and different crossover)•No independence required:composing geometric crossovers do not need to be independentIII.G EOMETRIC DESIGN FOR S UDOKUA.Sudoku constraints,search spaces and genetic operators Sudoku is a constraint satisfaction problem with4types of constraints:1)Fixed elements2)Rows are permutations3)Columns are permutations4)Boxes are permutationsIt can be cast as an optimization problem by choosing some of the constraints as hard constraints that all so-lutions have to respect,and the remaining constraints as soft constraints that can be only partially fulfilled and the level of fulfillment is thefitness of the solution.Notice that there is more than one combination available to set which are hard constraints and which are soft constraints.We have considered two search spaces,thefirst respecting one constraint,the other respecting two constraints at the same time.Trying to further restrict the search space,requiring to respect three constraints at the same time seems not to be feasible:even only generating a random solution within the space of grids respecting thefirst three constraints is a NP-complete problem being equivalent tofinding a solution to a Latin square.1)Restricted Hamming space:•Hard constraints:fixed positions•Soft constraints:permutations on rows,columns and boxes•Distance:Hamming distance between grids •Feasible geometric mutation:change any non-fixed el-ements•Feasible geometric crossover:traditional crossover over the vector obtained by joining the rows of the grid.It is easy to see that these mutation and crossover pre-servefixed positions from parent grids to offspring grids. The mutation is1-geometric under Hamming distance.The crossover,being the traditional crossover,is geometric under Hamming distance.To restrict the search to the space of grids withfixed positions,the initial population must be seeded with feasible random solutions taken from the feasible space,which is,by solutions respecting thefixed position constraints.2)Row-swap space:•Hard constraints:fixed positions and permutations on rows•Soft constraints:permutations on columns and boxes •Distance:sum of swap distances between paired rows (row-swap distance)•Feasible geometric mutation:swap two non-fixed ele-ments in a row•Feasible geometric crossover:row-wise PMX and row-wise cycle crossoverThis mutation preserves bothfixed positions and permuta-tions on rows because swapping elements within a row that is a permutation returns a permutation.The mutation is1-geometric under row-swap distance.Row-wise PMX and row-wise cycle crossover recombine parent grids applying respectively PMX and cycle crossover to each pair of corresponding rows.In case of PMX the crossover points can be selected to be the same for all rows, or be random for each row.In terms of offspring that can be generated,the second version of row-wise PMX includes all the offspring of thefirst version.Simple PMX and simple cycle crossover applied to parent permutations return always permutations.They also preserve fixed positions.This is because both are geometric under swap distance and in order to generate offspring on a minimal sorting path between parents using swaps(sorting one parent into the order of the other parent)they have to avoid swaps that change common elements in both parents(elements that are already sorted).Therefore also row-wise PMX and row-wise cycle crossover preserve both hard constraints.Using the product geometric crossover theorem,it is immediate that both row-wise PMX and row-wise cycle crossover are geometric under row-swap distance,since simple PMX and simple cycle crossover are geometric under swap distance.Since simple cycle crossover is also geometric under Hamming distance(restricted to permutations),row-wise cycle crossover is also geometric under Hamming distance.To restrict the search to the space of grids withfixed positions and permutations on rows,the initial population must be seeded with feasible random solutions taken from this space.Generating such solutions can be done still very efficiently.The row-swap space presents two advantages to the re-stricted Hamming space:(i)the search space of feasible solutions is much smaller and(ii)this restriction includes the optimum grid and prunes only grids with lowerfitness.B.Sudokufitness landscapesOne important benefit of knowing that a certain search operator is geometric under a specific distance is that it is possible to tell a priori whether the search operator is a good choice for a specific problem.From previous work,we know that,as a rule-of-thumb,search operators associated to afitness landscape with a smooth trend,in which closer solutions have strongerfitness correlation,are likely to perform well.Although this is quite intuitive for mutation operators,the geometric framework allows the extension to the case of crossover operators.In the following,we will show that thefitness landscapes associated with both spaces introduced in the previous section are smooth,making the search operators proposed a good choice for Sudoku. Fitness function(to maximize):sum of number of unique elements in each row,plus,sum of number of unique elements in each column,plus,sum of number of unique elements in each box.So,for a9×9grid we have a maximum fitness of9·9+9·9+9·9=243for a completely correct Sudoku grid and a minimumfitness little more than 9·1+9·1+9·1=27because for each row,column and square there is at least one unique element type.The maximum globalfitness variation is therefore little less than ∆F=216.Under Hamming distance,a single element change affects the currentfitness of-10+1for the row,for the column and for the box the elements belong to.So the total change in fitness due to a single element change is between-3and+3. The maximum localfitness variation is∆f H=3.Under row-swap distance,a single swap in a row affects the currentfitness of0for the row(permutation is preserved), in the range between-2and+2for the columns touched(a single swap canfix or unfix at most one element in two columns at the same time)and between-2and+2for the boxes touched.So the total change infitness due to a single swap in a row is between-4and4.The maximum local fitness variation is∆f rs=4.A simple measure of smoothness of the landscape is maximum local variation over maximum global variation. The smaller this measure,the smoother the landscape.S H= 3/216and S rs=4/216.Thefitness landscapes are both very smooth when compared with the two extreme of smoothness 0(no change between neighbor solutions)and1(maximum and minimum are neighbors).Interestingly,the Hamming space is smoother than the row-swap space.So,in terms of smoothness the Hamming space is a better choice than the row-swap space.It is also interesting to notice that the maximum globalfit-ness variation increases(linearly)with the grid size,whereas the the maximum localfitness variation is constant with the grid size.So,for increasing size of the problem,thefitness landscape becomes smoother.So this may counteract the increasing difficulty of the search due to a larger space.IV.SMART-SQUARE MUTATIONSince we want to get to the optimum as much as possible, and evolutionary algorithms are lazy optimiser,we use a heuristic mutation built for Sudoku.The smart square mutation applies the most obvious con-straints to the possible values of a square.For example,if a column has afixed‘9’in it,then all the squares in that column have‘9’removed from the set of possible values that it could take.These constraints are applied for rows,columns,and sub-squares(regions).For most sudoku grids,the application ofthese constraints from the initial set offixed numbers will fix some further numbers i.e.certain squares will have only one possible value.Such squares are added to the set offixed numbers,and the constraints thus arising are propagated.This process is iterated until no further numbers can befixed. When the process isfinished,each mutation now selects a square from the set of ones that are still free,and chooses only among the feasible values for that square.We implemented this as an obvious and irresistible im-provement over a simplistic mutation operator that did not account for these constraints.However,there are many further sudoku constraints that we could have implemented, and taken to their logical extreme would solve most sudoku problems without the need for any search(evolutionary or otherwise).V.E XPERIMENTSA.Genetic FrameworkWe tested the various operators with a steady state evolu-tionary algorithm.In the following,we describe the frame-work used in our experiments.The parameters were subject to extensive automatic tuning.•Encoding:Each individual was encoded as an array of81integers in the range[0..9],which was interpreted as a vector of 9rows.•Initialization:For the hamming space experiments,each candidate solution of thefirst generation had the contents all non-fixed positions set to random integers in the range[1..9].For the swap space experiments,each row of eachcandidate solution in thefirst generation was a random valid permutation of all numbers in the range[1..9], respectingfixed positions.See section III for more information.•Population:The population size was set to5000,with an elite of 2500candidate solutions.•Selection and replacement:Each generation,all candidate solutions were evaluated using thefitness function described in section III.The whole population was then sorted based onfitness,so that the2500best candidates formed the new elite.The other half of the population was replaced with2500new candidates,created by crossover and mutation(using the current operators)from two candidates randomly selected from the elite.•Crossover:We used the crossover operators described in section III.All crossovers operate within the bounds of single rows(so e.g.PMX is row-wise PMX),except two-point crossover,which is traditional two-point crossover ap-plied to the whole grid seen as a vector,and the whole-row crossover,which randomly selects whole rows from either of the two parents,and is geometric under both distances.Cycle crossover takes two forms:onecycle,the form proposed by Goldberg[2],which considers only one cycle,and multicycle,which considers all possible cycles.Uniform swap is a sorting crossover based on edit-swap-move.•Mutation:For each newly formed candidate in a population,the current mutation operator was applied with probability0.8.A number of mutation operators were used.Forthe hamming space,we used point mutation,meaning that one non-fixed position was set to a new random value in the range[1..9](Table II);uniform swap mutation,where the values of two randomly selected positions of the whole grid are exchanged(Table III);and exponential probability point mutation,after each point mutation there is a0.8probability of a new point mutation,leading to a theoretically infinite number of mutations,but in practice only a handful(Table IV).We also tried the algorithm without any mutation at all (Table I).For the swap space,we used the row swap mutator, where two non-fixed positions in a row were exchanged (Table VI).We also used an exponential probability row swap mutator(Table VII),and tried the various crossover operators without any mutation(Table V).•Stopping criterion:The stopping criterion was that no progress had been made(nofitter candidates discovered)for20genera-tions.We further tested all the mutation operators,including the smartsqaure,as local search operators.In other words,we used these operators as bases for hill-climbers.Initialization andfitness function for the hill-climbers were the same as for the population-based algorithms,and the stopping criterion was that no progress had been made for100000fitness evaluations.B.Test EnvironmentFive initial sudoku grids were taken from the sudoku problem generator at .Three of them were classified(by the generator program)as easy,one as medium hard and one as hard.We then ran30evolutionary runs of each combination of crossover and mutation operator on each initial grid.As time efficiency was not a main concern,we did not measure the time taken for each run.C.ResultsThe result tables are organized by mutation type.1)Hamming space:In Tables I,II,III and IV,we report the results for mutations and crossovers associated with the Hamming space.The best crossover,independent of mutation operator,is whole-row crossover,followed by two-point crossover.But even with row-wise crossover,we only relatively rarely manage to reach the optimal solution.We have never evolved an optimal solution without crossover,or when using uniform crossover.2)Swap space:In Tables V,VI and VII,we report the results for mutations and crossovers associated with the Swap space.In general,thefinalfitnesses are a lot higher for the swap space experiments than for the Hamming space experiments.For the three easy instances,all the crossovers generally perform very well,when supplied with some muta-tion.PMX,uniform swap and multicycle crossover perform surprisingly well even in the absence of mutation.For the “medium”difficulty problem,no combination managed to evolve the optimal solution,but for the hard problem either uniform swap or multicycle crossover seems to perform best, in one casefinding the solution15times out of30.3)Hill-climbers:In table VIII,we report the results for the hill-climbers.The smartsquare mutation solved all the easy problems instantaneously,without even starting the evolutionary process.The two other mutators that performed reasonably well were uniform swap and exponential proba-bility row swap mutation.No mutators managed to get even close to optimalfitness for the medium and hard problem instances.Grid None Uniform Twopoint Whole-row #opt avg#opt avg#opt avg#opt avg Easy10211021202401239 Easy20212021212397241 Easy30215021442391239 Med10210021002350236 Hard10210020902370239TABLE IN O MUTATION,HAMMING SPACE CROSSOVERS.E ACH CELL CONTAINS THE NUMBER OF EVOLUTIONARY RUNS OUT OF30THAT PRODUCED THE OPTIMAL SOLUTION,AND THE MEAN FITNESS OF THE BEST CANDIDATE OF THE LAST GENERATION OF ALL30RUNS(THE MAX FITNESS IS243).Grid None Uniform Twopoint Whole-row #opt avg#opt avg#opt avg#opt avg Easy10231021242401240 Easy20231021222398241 Easy30232021352419241 Med10228021002350237 Hard10230021002371239TABLE IIP OINT MUTATION,HAMMING SPACE CROSSOVERS.Grid None Uniform Twopoint Whole-row #opt avg#opt avg#opt avg#opt avg Easy10231021222405241 Easy20231021242388241 Easy302310213424014242 Med10227021002320236 Hard10229021002360238TABLE IIIU NIFORM SWAP MUTATION,HAMMING SPACE CROSSOVERS.Grid None Uniform Twopoint Whole-row #opt avg#opt avg#opt avg#opt avg Easy10222021212382240 Easy20221021212378241 Easy30221021432383240 Med10220021002310235 Hard10220021002340238TABLE IVE XPONENTIONAL PROBABILITY POINT MUTATION,H AMMING SPACECROSSOVERS.VI.C ONCLUSIONSIn this paper we have designed new geometric crossovers for the Sudoku puzzle that deal in a natural way with its constraints.We have demonstrated the usage of the important notion of product geometric crossover to straightforwardly derive(i)new geometric crossovers for the entire grid obtained by employing simple geometric crossovers for each row and(ii)the distance functions associated with them.This has allowed us to analyze the geometricfitness landscape associated to the new geometric crossovers and tell a priori, by the way thefitness landscape is constructed,that the new crossovers are very well-suited to the Sudoku puzzle hence likely to perform well.We extensively tested a number of geometric crossovers,mutations and hill-climbers and found that the operators associated with the row-swap distance are the best and produce consistently(near)optimal Sudoku grids.In future work,we want to extend our analysis to Sudoku grid of increasing size and combine smartsquare mutation with the best geometric crossover to tackle bigger and tougher instances.R EFERENCES[1]M.Deza and urent.Geometry of cuts and metrics.Springer,1991.[2] D.Goldberg.Genetic Algorithms in Search,Optimization,andMachine Learning.Addison-Wesley,1989.[3]T.Jones.Evolutionary Algorithms,Fitness Landscapes and Search.PhD thesis,University of New Mexico,1995.[4] D.E.Knuth.Dancing links.Preprint P159,Stanford University,2000.[5] A.Moraglio.Product geometric crossover.Technical Report CSM-446,University of Essex,2006.[6] A.Moraglio and R.Poli.Topological interpretation of crossover.InProceedings of the Genetic and Evolutionary Computation Conference, pages1377–1388,2004.[7] A.Moraglio and R.Poli.Geometric crossover for the permutationrepresentation.Technical Report CSM-429,University of Essex,2005.[8] A.Moraglio and R.Poli.Geometric landscape of homologouscrossover for syntactic trees.In Proceedings of CEC2005,pages 427–434,2005.[9] A.Moraglio and R.Poli.Topological crossover for the permutationrepresentation.In GECCO2005Workshop on Theory of Representa-tions,2005.[10] A.Moraglio,R.Poli,and R.Seehuus.Geometric crossover forbiological sequences.In Proceedings EuroGP(to appear),2006. [11]P.M.Pardalos and M.G.C.Resende,editors.Handbook of AppliedOptimization.Oxford University Press,2002.[12]T.Yato and plexity and completeness offinding anothersolution and its application to puzzles.Preprint,University of Tokyo, 2005.。