清华大学计算固体力学第十次课件_接触-碰撞
碰撞(公开课)ppt

即:动量守恒,动能不守恒
三、对心碰撞与非对心碰撞 1、对心碰撞——正碰:
碰前运动速度与两球心连线处于同一直线上
2、非对心碰撞——斜碰: 碰前运动速度与两球心连线不在同一直线上
【设问】斜碰过程满足动量守恒吗?为什么?如图, 能否大致画出碰后A球的速度方向?
② 若m1>m2 , 则v1’>0;且v2’一定大于0
若m1<m2 , 则v1’<0;且v2’一定大于0
③若 m2>>m1 , 则v1’= -v1 , v2’=0 .
④ 若 m1 >> m2 , 则v1’= v1,v2’=2v1 .
小结:质量相等,交换速度; 大碰小,一起跑;小碰大,要反弹
2. 非弹性碰撞:碰撞中有能量损失 即:动量守恒,动能不守恒
按能量损失的情况分
斜碰
弹 性 碰 撞 : 动量守恒,动能没有损失
非 弹 性 碰 撞 : 动量守恒,动能有损失 完全非弹性碰撞: m1v1+m2v2=(m1+m2)v
,动能损失最大
1、现有AB两滑块,质量分别为3m和m,以相同的 速率v在光滑水平面上相向运动,发生了碰撞, 已知碰撞后,A静止不动,则这次碰撞是()
• 以v2=0.8m/s 的初速度水平向右运动, (取g= 10m/s2)求:
• (1)物块和小车相对静止时,物块和小车的速度 大小和方向
• (2)为使物块不从小车上滑下,小车的长度L至
少多大?
v1
m
M v2
解:(1)木块先向左匀减速运动到0,再匀加 速运动到共同速度V
由动量守恒定律 V=0.4m/s
清华大学计算固体力学全套课件
TSINGHUA UNIVERSITY
全套课件
计算固体力学
TSINGHUA UNIVERSITY
第1章 绪论
计算固体力学课程体系
TSINGHUA UNIVERSITY
全面介绍非线性有限元的前沿性内容,使学习 者能进入这一领域的前沿,应用非线性有限元方法 求解弹塑性材料、几何大变形和接触碰撞这些非线 性力学的主要问题,增强工程结构中非线性计算和 虚拟仿真的能力,提高非线性有限元的教学和科研 水平。
TSINGHUA UNIVERSITY
计算固体力学课程体系
教学内容:
1. 绪论:非线性有限元的基本概念,发展历史,工程应用, 标记方法,网格表述和偏微分方程的分类。(2) 2. 一维L有限元:TL和UL格式的控制方程。E有限元:E公式 的控制方程,弱形式与强形式。(4) 3. 连续介质力学:变形和运动,应力-应变的度量,守恒 方程,框架不变性。(4) 4. L网格:UL有限元离散,编制程序,旋转公式。(4) 5. 材料本构模型:一维弹性,非线性弹性,如次弹性和超 弹性。一维塑性,多轴塑性,超弹-塑性(橡胶和泡沫 模型),粘弹性(蠕变和松弛等),经验本构模型,如 J-C方程等。应变硬化和软化。(4) 6. 求解方法:应力更新算法,平衡解答和隐式时间积分 (N-R求解等),显示时间积分(中心差分等) ,波的 传播问题。(4) TSINGHUA UNIVERSITY
Engineering Science- is the systematic acquisition of knowledge for the purpose of applying it to the solution of problems effecting the needs and well-being of human kind. SBES- engineering science and science that employs the principles and methods of modeling and computer simulation to acquire and apply knowledge for the benefit of human kind.
理论力学-碰撞

n
mz (Si(e) )
2 1 i1 I z
26
碰撞时刚体角速度的改变,等于作用于刚体的外碰撞冲 量对转轴之矩的代数和 除以刚体对该轴的转动惯量。
下面研究碰撞时轴承反力的碰撞冲量SO 的计算及消除条件: 设刚体有对称面,绕垂直此平
面的固定轴Oz转动,质量M,质心
C点且OC= a,s 作用在对称平面
撞冲量的矢量和。
式(19-1)、(19-2)和(19-3)都写成投影形式,形式上与普 通的动量定理相同,所不同的是在这里都不计普通力的冲量。
2、用于碰撞过程的动量矩定理——冲量矩定理
由假设(2)知,碰撞过程中,质点的矢径 r 保持不变,
则由(19-1)式,有:
r mu r mv r S
而 r mv lO1 , r mu lO2 ;lO1和lO2 为碰撞始末时质点对
(2)
对于塑性碰撞
(k
=0):T
T1
T2
m1m2 2(m1 m2 )
(v1
v2 )2
或
T
1 2
m1(v1
u1)2
1 2
m2 (v1
u2)2
塑性碰撞时损失的动能等于速度损耗的动能。 若v2=0,则
(3)
T
m1m2 2(m1 m2 )
v12
1 2
m1v12
对于弹性碰撞 (0<k <1 ):
m2 m1 m2
m1 m2
25
§19-5 碰撞冲量对绕定轴转动刚体的作用 撞击中心
设刚体绕固定轴z 转动,转动惯量为IZ,受到外碰撞冲量
S (e) i
(i
1,2,, n)
的作用。
碰撞开始时 Lz1 I z1
清华大学计算固体力学第十次课件 接触-碰撞

2
接触界面方程
不可侵彻性条件 运动学
由于以位移的形式表示交集为零的公式是不可能的,所 以,在接触过程的每一阶段中以率形式或者增量形式表示不 可侵彻性方程是很方便的。其率形式应用到物体A和B上发生 接触的部分,即是位于接触表面上的那些点
A B N v A n A v B n B (v A v B ) n A vN vN 0
PQ x ζ
B
1 2 (1 r ) r (1 r )
2 3 2
x ζ x
B A A
B
x
2
A 2
y
3 2
By2Fra bibliotek12 A 2
(1 r
) r (1 r )
3 2
2 12
取最小化给出为
0
d PQ dr
不可侵彻性条件
一对物体的不可侵彻性条件可以表示为交集为零
A B 0
两个物体不允许重叠,这可以视为一个协调条件。对于大位 移问题,不可侵彻性条件是高度非线性的,并且一般不能以位移 的形式表示为一个代数方程或者微分方程。其困难源于在一个任 意运动中,不可能预先估计到两个物体的哪些点将发生接触。 例如,如果物体在旋转中,对于 P 点接触Q 点是可能的,而一个 不同的相对运动可能导致 P 点与 S 点接触。结论是,除了以一般 的形式,找不到其它的方程表示 P 点没有侵入物体A 的事实。
4 S x , y 1.5
B
s B, 0 s 1
在例子中的相互侵彻已经被夸大了。注意到沿着界面有
n B n A
对于在表面B上的点P,找到相互侵彻。求点Q 正交投影的最小值
《碰撞》-课件
4. 如图所示,abc 是光滑的轨道,其中 ab 是水平的,bc 为 与 ab 相切的位于竖直平面内的半圆,半径 R = 0.30 m。质 量 m = 0.20 kg 的小球 A 静止在轨道上,另一质量 M = 0.60 kg、速度 v0 = 5.5 m/s 的小球 B 与小球 A 正碰。已知相碰后 小球 A 经过半圆的最高点 c 落到轨道上距 b 点为 L 4 2R 处,重力加速度 g 取 10 m/s2,求碰撞结束时,小球 A 和 B 的速度的大小。
(1) 规律:动量守恒、机械能守恒 (2) 能量转化情况:系统动能没有损失
2. 完全非弹性碰撞:碰撞后两物体连在一起运动的现象。 (1) 规律:动量守恒,机械能减少 (2) 能量转化情况:系统动能损失最大
3. 对心碰撞和非对心碰撞
簧压缩至最短的整个过程中( B )
A. 动量守恒,机械能守恒 B. 动量不守恒,机械能不守恒 C. 动量守恒,机械能不守恒 D. 动量不守恒,机械能守恒
A
1. 动量守恒; 2. 动能不会增加; 3. 符合实际情况。如运动方向一致时,后边物体速度
一定小于前边物体速度等。
AC
A. 碰前 m2 静止,m1 向右运动 B. 碰后 m2 和 m1 都向右运动 C. m2 = 0.3 kg D. 碰撞过程中系统损失了 0.4 J 的机械能
(5) 若 m1 >> m2 , 则 v1ʹ = v1, v2ʹ = 2v1
5. 非弹性碰撞
v1
地面光滑
v2
m1v1 m2v2 m1v1 m2v2
1 2
m1v12
1 2
m2v22
1 2
m1v12
1 2
m2v2 2
Ek
3. 完全非弹性碰撞:碰撞后两物体连在一起运动的现 象。系统机械能损失最多。
理论力学经典课件-碰撞
这时,
vA =vB =v AB
于是,有
mA v A mB vB mA mB v AB
v AB
mA vA mB vB mA mB
18 103 0.2 i 0.03 j 0.02 k 0
18 103 6.6 103
0.146 i 0.022 j 0.015 k m/s
AB
vAB A v'A B v'B
由
mA v A mB vB mA vA mB vB
k I2 vB vA I1 vA vB
解得碰撞后两个球的速度分别为
vA
vA
1
k
mA mA mB
vA
vB
vB
vB
1
k mA
mA mB
vA
vB
vA A
B vB
AB
vAB A v'A B v'B
(3)碰撞后阶段
根据平面运动微分方程,有
maC F mgf
JC Fr mgfr
由运动学可知
v vC aCt
C t
C
aC
mg
F FN
由平面运动可知,当 v rC 时,轮开始纯滚
解得: t 1 k 3gl 0.24 s 14gf
突加约束问题
运动的刚体 突然受到其他 物体的阻碍, 发生碰撞,在 接触处发生完 全不可恢复的 变形,亦即产 生完全非弹性 碰撞-突然施 加约束,简称 突加约束。
例题6
质量为m、半径为r的均
质圆柱体,以质心速度vC
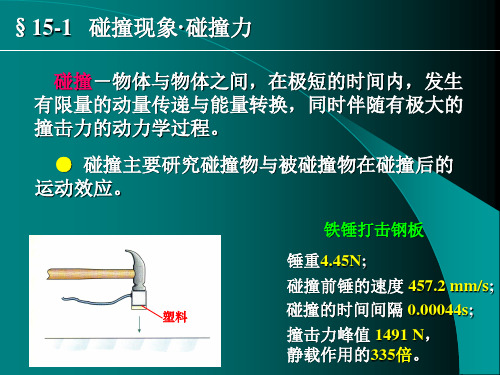
§15-1 碰撞现象·碰撞力
碰撞-物体与物体之间,在极短的时间内,发生 有限量的动量传递与能量转换,同时伴随有极大的 撞击力的动力学过程。
高三物理碰撞课件

反冲运动模型
总结词
反冲运动模型是碰撞问题的一个特例,涉及到物体在碰 撞后反向运动的现象。
详细描述
反冲运动模型描述了一个物体在静止时受到一个力的作 用后发生碰撞,并沿着相反方向运动的物理过程。根据 动量守恒定律,物体碰撞后的速度v'可以由公式mv0=mv计算得出,其中m为物体的质量,v0为物体碰撞前的 速度。同时,根据能量守恒定律,碰撞过程中没有能量 损失,因此有公式1/2mv0^2=1/2mv'^2。
详细描述
子弹打木块模型描述了一个子弹以速度v0射 入静止的木块,并留在其中共同运动的过程 。根据动量守恒定律,子弹和木块在碰撞后 的共同速度v可以由公式mv0=Mv+mv1计 算得出,其中M为木块的质量,m为子弹的 质量,v1为子弹在木块内的速度。同时,根 据能量守恒定律,碰撞过程中没有能量损失
,因此有公式 1/2mv0^2=1/2(M+m)v^2+1/2mv1^2
整体法
总结词
整体法是将参与碰撞的物体视为一个整体,分析整体在碰撞前后的动量变化,从而得出碰撞结果。
详细描述
在整体法中,我们需要将参与碰撞的物体看作一个整体,分析整体在碰撞前后的动量变化。这种方法 适用于两个物体在同一直线上发生碰撞的情况,可以简化问题的复杂度,提高解题效率。
隔离法
总结词
隔离法是将参与碰撞的物体逐一隔离分析,通过分析单个物体的动量变化,得出碰撞结果。
06
CATALOGUE
碰撞的实验验证
实验目的
01
02
03
验证碰撞定律
通过实验观察和测量,验 证物体碰撞前后遵循的动 量守恒和能量守恒定律。
理解碰撞过程
通过实验观察碰撞过程中 物体的速度、动量和能量 的变化,加深对碰撞过程 的理解。
清华大学理论力学--刚体碰撞试验

刚体碰撞试验实验报告同组成员:实验日期:一、实验目的对理论力学课程中碰撞基本知识的加深理解1、掌握恢复系数、冲量比等参数测量方法2、了解三维空间碰撞问题的简化处理方法二、实验内容1、恢复系数e 的测定2、冲量比μ的测定3、三维空间碰撞简化处理方法的介绍三、实验设备:碰撞实验台见图一所示。
按动发球器1右侧的按钮,可以使发球器中存储的钢球以自由下落的方式发出;当钢球碰落到撞块A 时发生碰撞,并反弹继续运动;当钢球碰落到撞块B 时,再次发生碰撞,反弹继续运动;最后钢球将溅落到底板的某一位置。
四、实验步骤及实验原理:1、恢复系数e 的测定测定恢复系数时,需将碰撞块A 的上表面的外法线调至垂直向上的方向,即方向余弦向量为(0,0,1)T 。
钢球自由下落开始时的位置已知,通过立柱上刻度尺可以测量钢球碰撞后的反弹高度,从而可以计算出碰撞中的恢复系数。
见图二。
设初始高度为0h ,碰撞前速度为1v ,i V 表示第i 次碰撞后钢球的质心速度,碰撞后钢球反弹的最高位置为m ax h ,则:012gh v =, max 12gh V -= (负号说明方向为-Z 方向)恢复系数的定义为:AAv v V V e ---=11,碰撞块A 的碰撞前和碰撞后速度均为0,可得:maxh h e =(1)1:发球器2:碰撞块B 3:围栏4:调节螺钉(3⨯) 5:底板 6:滑轨 7:碰撞块A 8:立柱该碰撞台中的可调节部分为:6与8之间可滑动,调A 、B 的间距 7与8之间可转动,调碰撞面A 法向 2与5之间可转动,调碰撞面B 法向 4与5之间可转动,调平实验台测出m ax h 的值便可以由式(1)计算出恢复系数e2、冲量比μ的测定测定冲量比时,需将碰撞块A 的上表面的外法线调至垂直向上的方向,另外还要取下 碰撞块B ,这时钢球经过第一次碰撞将直接溅落在底板上。
通过测量其溅落位置并结合已测 定的恢复系数可以得到冲量比的测定结构,见图 三。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
接触界面方程
A B N vN vN 0
不可侵彻性条件
上面强化公式将不连续性引入速度时间历史中。在接触之 前,法向速度是不相等的,而在随后发生碰撞,法向速度分量 必须满足公式。在时间上的这些不连续性使得离散方程的时间 积分变得很复杂。
N
间隙率是相互侵彻率的负数。
A B ˆTx e ˆx ˆTy e ˆ y vT γT vT
2
接触界面方程
在通用有限元软件中,接触算法能够处理多个物体的相互作 用,然而多个物体的接触包含成对物体的相互作用。因此,从考 虑两个物体的问题入手。 接触界面包括两个物体处于接触的两个物理表面,它们是重 合的,在数值计算中,两个表面一般不重合,分为主控和从属表 面。接触界面是时间的函数,确定它是接触-碰撞问题解答的重要 部分。 接触界面包含两个物体表 面的交界。
考虑发生部分侵彻的两个表面。主控物体是9节点等参单元, 所以表面A 的3个节点是二次映射定义:
x 2 1 r y
A
2 1 3 r ( 1 r ) 1 3 2
其中 r δ A , 1 r 1
从属物体B的表面为一条水平线,给出为
2
接触界面方程
A B N vN vN 0
A B tN tN (x, t ) t N (x, t ) 0
单一接触条件
由不可侵彻性条件 由法向面力不是拉力的条件
得到单一接触条件
t N N 0
N 0
t N 0 ,乘
这个方程也可以表示为接触力的法向分量不工作的事实。
相对切向速度给出为
2
接触界面方程
动力学-面力条件
横跨接触界面,面力必须服从动量平衡。由于界面上没有质 量,这就要求两个物体上面力的合力为零:
tA tB 0
在法线方向上,不考虑在接触表面之间的任何粘性,法向面 力不能是拉力。其条件表示为
A B tN tN (x, t ) t N (x, t ) 0
PQ x ζ x ζ
B B A 2
x x y y 1 2(1 r ) r (1 r ) (1 r ) r (1 r )
A B A 2 B 12 A 2 3 2 2 3 2 2 3 2
B 这个条件要求 t N 为正数,物体B上的面力在A的单位法线上的投影,
它指向物体B。对应于物体A和B,注意到上面的表达式是不对称的。 为了定义法向面力,选择其中一个物体的法向,并且物体法向面 力的符号将取决于选择的这个法向。
2
接触界面方程
面力条件
定义切向面力为
A A A tT t A tN n , B B A tB T t tNn
AB x ζ , t x ζ , t x -x
B B A A B
A 2
y
B
y
A 2
z
B
z
1 A 2 2
2
接触界面方程
AB x ζ , t x ζ , t x -x
B B A A B
相互侵彻度量
A 2
y
1
引言
接触-碰撞问题是属于最困难的非线性问题之一,因为在 接触-碰撞问题中的响应是不平滑的。
当发生瞬时接触时,垂直于接触界面的速度是瞬时不连 续的。对于Coulomb摩擦模型,当出现粘性滑移行为时,沿着 界面的切向速度是不连续的。
接触-碰撞问题的这些特性给离散方程的时间积分带来了 明显的困难,削弱了Newton算法的功能。 因此,选择适当的方法和算法是至关重要的,并且在获 得强健的求解程序中,规则化的技术是非常有用的。
在 /Explicit 中的接触模拟可以利用通用(“自动”)接 触算法或者接触对算法。通常定义一个接触模拟只需简单地指 定所采用的接触算法和将会发生接触作用的表面。在某些情况 下,当默认的接触设置不满足需要时,可以指定接触模拟的其 它形式;例如,考虑摩擦的相互作用力学模型。
通用接触算法(general contact)
在Γc 上
两个物体的相互侵彻速率
A vN vA nA,
B vN vB nA
利用
A A A A A A A ˆ vN ˆ v A=vN n v e n vT
A B B ˆ ˆ e v v n v vN n vB T B B N A B
A 点乘 n
得到上两式
2 12
取最小化给出为
0
d PQ dr
1 PQ
r
3
3r
3 4
数值求解上式的根为r=-0.2451,因此Q点位置为,
x
Q
, yQ 1.6023 , 0.6624
2
接触界面方程
相互侵彻度量
当两个物体是不光滑或者不是局部地凸状时,这种定义相互 侵彻的方法将会遇到困难。如在图示情况下, AB 的最小值是 不唯一的:这里有两个点为 P 的正交投影。在这种情况下,难以 建立一种方法,能够唯一地定义相互侵彻的度量。
并且利用法线是正交于与平面相切的单位矢量的事实。
2
接触界面方程
A B N vN vN 0
不可侵彻性条件
对于在接触表面上的任意点,不可侵彻性条件限制了相互 侵彻速率成为负值,表示当两个物体发生接触时,它们或者必 须保持接触 ( N 0) 或者脱离 ( N 0) 。 对于接触区域上的所有点当满足上式时,精确满足不可侵 彻性条件。然而,公式与交集为零不是等价的。在大多数数值 方法中,仅在瞬时时刻注意到该式,对于接近分离而没有接触 的点,相互侵彻是可能的。该式仅适用于处于接触的成对点。
电子产品跌落模拟
在电子工业中,为了评估 产品的耐久性,仿真分析 正代替跌落试验。
C ΓA ΓB
模拟接触-碰撞问题的标记
2
接触界面方程
A e1A e x
A A e2 ey
A n A e1A e2
在主控接触表面的每一点建立局部坐标系统,可以构造相切 于主控物体表面的单位矢量:
物体A的法线给出为 在接触界面上有 即两个物体的法线方向相 反。以局部分量的形式表 示速度场
通过一个有转折表面的侵彻,说明正交映射点求解的不唯一性。
2
接触界面方程
在ABAQUS/Standard和/Explicit中的接触模拟功能具有明 显的差异。
在/Standard中的接触模拟或者是基于表面(surface)或 者是基于接触单元( contact element )。因此,必须在模型 的各个部件上创建可能发生接触的表面。然后,必须判断哪一 对表面可能发生彼此接触,称之为接触对。最后,必须定义控 制各接触面之间相互作用的本构模型。这些接触面相互作用的 定义包括如摩擦行为等。
1 g N (ζ , t ) min , AB A 0
B
如果(x B x A ) n A 0 如果(x B x A ) n A 0
令相互侵彻度量对坐标求导数取值为零,求出 g N ζ B , t 最小值。
2
接触界面方程
例子10.1
B
y
A 2
z
B
z
1 A 2 2
相互侵彻量 g N ζ B , t 为上式的最小值,并且考虑到仅当 P 在物 体A内部时才是非零的。通过检验法线到物体A在 X B X A 上的投影,可以检验后面的条件:当投影是负值时,点P是在物 体A的内部,因此有相互侵彻,否则P不在A的内部,没有相互侵 彻。所以,相互侵彻的定义是
2
接触界面方程
物体由标准场方程控制:质量、动量和能量的守恒,应变度 量,以及本构方程。接触增加了条件: 1 2 在界面上,两个物体不可相互侵入和面力满足动量守恒; 横跨接触界面的法向面力不能为拉力。
按照要求分类:
1
2
对于位移和速度的要求作为运动学条件,
对于面力的要求作为动力学条件。
2
接触界面方程
A A A A A A A ˆ vN ˆ v A=vN n v e n vT
B A B A B B ˆ vN ˆ v B vN n v e n vB T
n A n B
在三维问题中希腊字母 下角标的取值范围为2;当问 题是二维时,接触表面成为 一条线,取值为1。
2
接触界面方程
不可侵彻性条件 运动学
由于以位移的形式表示交集为零的公式是不可能的,所 以,在接触过程的每一阶段中以率形式或者增量形式表示不 可侵彻性方程是很方便的。其率形式应用到物体 A和 B上发生 接触的部分,即是位于接触表面上的那些点
A B N v A n A v B n B (v A v B ) n A vN vN 0
4 S x , y 1.5
B
s B, 0 s 1
B A 在例子中的相互侵彻已经被夸大了。注意到沿着界面有 n n
对于在表面B上的点P,找到相互侵彻。求点Q 正交投影的最小值
PQ
2
接触界面方程
例子10.1
对于在表面B上的点P,找到相互侵彻。求点Q 正交投影的最小值
切向面力投影到主控接触表面上的面力合力,由动量平衡要求
A tT tB T 0
当应用接触的无摩擦模型时,切向面力为零
A tT tB T 0
在前面建立接触界面方程中,尽管选择了其中一个物体为主 控物体,当两个接触表面是重合时,且满足公式 n A n B , 对于物体,这些方程是对称的。因此,选择哪个物体作为主控物 体是没有关系的。但是,当两个表面不重合时,如在大多数数值 求解中,则主控物体的选择会改变结果。