基于数字地球的虚拟海战场环境仿真
虚拟海浪海洋环境模拟方法及应用

中 图分 类 号 : 6 11 U 6 . 文献标志码 : A 文 章 编 号 : 63— 8 7 2 1 )3— 2 3— 5 17 4 0 (0 2 0 0 1 0
Vit lwa e a a i nv r n e i u a i n r ua v nd m rne e i o m ntsm l to m e ho nd is a lc to t d a t pp ia i n
Vo12 . . 6 No 3
Jn2 2 u .01
虚 拟 海 浪 海 洋 环 境 模 拟 方 法及 应 用
杨 松 林 李 慧 蕾 , ,李 坤 ,严 家 文。 任 慧龙4 ,
(. 1 江苏科技 大学 船舶与海洋工程学 院 , 江苏 镇江 22 0 ) 10 3 (. 2 江苏现代造船技术有 限公 司 , 江苏 镇江 22 0 ) 103 (. 3 中国船舶及海洋 工程 设计研究院 , 上海 20 1 ) 0 0 1
完成 了虚拟海浪海洋环境模拟 流程和数据库界面的设计 , 海浪 虚拟化. 将 以结 构强度虚 拟测试 为例 , 介绍 了外载定义 过程 船舶航 行海况的设置方法 , 得到 了海浪谱 曲线 和海 况的波面运动 图. 究结果 表明 : 研 动态海 况的显示 技术 和海洋环境 数据
库 的配合使用 , 为船舶 结构强度和总体性能虚拟测试 提供了 良好 的测试环境.
No t wetWa e at t a e ite y Fa g Zh n s ng,a s fwa e wa v l p d t e lz h v it a— rh s v sSt i i lS twr tn b n o g he sc ot r sde eo e o r aie t e wa e vru l ia in,daa s ntra e d sg n r lmi a i l t n pr c s fvrua v si h rn n io me t zt o tba e i e c e in a d p ei n r smu a i o e so i f y o t lwa e n t e ma e e v r n n . i
海洋环境模拟与预测技术设计

海洋环境模拟与预测技术设计1. 研究背景与意义海洋环境是地球上最广阔的生态系统之一,对全球气候变化、生态系统平衡以及人类社会的可持续发展具有重要影响。
然而,海洋环境的复杂性和不可预测性使得对其进行准确模拟和预测成为一项具有挑战性的任务。
为了更好地理解和保护海洋环境,海洋环境模拟与预测技术设计成为了当今海洋科学研究的重要方向。
2. 海洋环境模拟技术设计2.1 数值模型数值模型是进行海洋环境模拟与预测的基础工具之一。
通过数学方程对流体运动、热传输、盐度变化等进行描述,并借助计算机技术进行数值求解,可以得到海洋中各种物理过程的时空分布。
常用的数值模型包括地球系统模式(ESM)、大气-海洋耦合模式(AOGCM)、波浪动力学模型等。
2.2 数据同化数据同化是将观测数据与数值模型相结合,通过优化算法将观测数据融合到数值模型中,以提高模型的准确性和可靠性。
常用的数据同化方法包括最优插值方法、卡尔曼滤波方法、变分同化方法等。
数据同化可以有效地改善数值模型的初始场和边界条件,提高海洋环境模拟和预测的准确性。
2.3 网格划分与离散化海洋环境模拟与预测需要对海洋空间进行离散化处理,将连续的物理过程转化为离散的数值计算问题。
网格划分是将海洋空间划分为若干个小区域或网格单元,常用的网格包括经纬度网格、正交曲线坐标网格等。
离散化是对物理过程进行数值逼近,常用的方法包括有限差分法、有限元法、有限体积法等。
3. 海洋环境预测技术设计3.1 气象与气候预测气象与气候对海洋环境起着重要影响。
气象预测可以通过数值天气预报模型对大气运动进行模拟,从而提供风速、风向等重要参数供海洋环境模型使用。
而气候预测则是对长期气候变化进行预测,可以为海洋环境的长期变化趋势提供参考。
3.2 海洋动力学预测海洋动力学预测是对海洋流场的变化进行模拟和预测,包括海流、海表面高度、海温等。
通过数值模型和数据同化技术,可以对海洋动力学过程进行准确模拟,并提供实时的流场信息,为航行安全、渔业资源管理等提供重要参考。
基于OSGEARTH的国产航天三维仿真软件设计
基于OSGEARTH的国产航天三维仿真软件设计施斌; 王华; 伍辉华; 姚宇婕; 杨洋【期刊名称】《《计算机系统应用》》【年(卷),期】2019(028)012【总页数】7页(P105-111)【关键词】OSG; OSGEARTH; 三维仿真; 国产化【作者】施斌; 王华; 伍辉华; 姚宇婕; 杨洋【作者单位】中国卫星海上测控部江阴 214431【正文语种】中文引言目前,航天领域的各类三维仿真软件仍然较依赖于国外成熟商用组件(如STK[1,2]),或者依赖于X86架构的硬件平台,无法完全满足“自主可控”要求.“自主可控”就是要依靠自身研发设计,全面掌握产品核心技术,实现信息系统从硬件到软件的自主研发、生产、升级、维护的全程可控.目前,国内已经开展了很多基于OSG或OSGEARTH的跨平台研究和应用,主要应用于虚拟校园漫游、城市三维场景、空战模拟场景、战场态势等方面[3-9],在航天三维仿真领域应用[10-13]不多,在全国产化平台(国产CPU板卡和国产操作系统)上经过可靠性和性能验证的更是空白.本文尝试针对全国产化平台进行航天三维仿真软件的设计和实现,以解决在全国产化平台上进行三维仿真的可靠性和渲染效率问题.1 相关概念1.1 国产化在CPU领域,目前较主流、成熟的国产化CPU是飞腾和龙芯.飞腾CPU采用ARM 指令集,目前主推的是FT1500A芯片,龙芯CPU采用RISC指令集,目前主推的是龙芯3A3000芯片,主频均达到1.5 GHz.国产化CPU芯片与X86芯片(主频大多在2.8 GHz以上)相比,主频相对落后,使用体验上存在明显差距,特别是在软件编译、图形绘制等计算量大的任务中更为明显.在显卡领域,目前尚未推出成熟的国产化显卡产品,暂时仍依赖国外显卡.在操作系统领域,目前已出现了中标麒麟、银河麒麟、深度Linux等多种国产操作系统,已经具备较强的替代能力,但在运行稳定性、性能等方面存在短板.1.2 OSG与OSGEARTHOSG是一个开源的场景图形管理开发库,为图形图像应用程序的开发提供场景管理和图像渲染优化功能[14].OSG具备跨平台特性,可以在大部分CPU上编译通过,可以运行于Windows、Linux等大多数操作系统,具备线程安全性. OSGEARTH是一个基于OSG的开源跨平台类库,提供了一个地理空间SDK和地形引擎,可以从数据源构建可视化地形模型和影像,方便快速构建基于三维数字地球的各类应用,在各领域已有广泛应用.2 系统设计2.1 系统架构航天三维仿真软件的系统架构如图1所示,底层是麒麟国产操作系统,第二层的Qt 提供基本界面功能支持,第三层的OSG提供三维仿真基础框架和功能,第四层的OSGEARTH提供三维数字地球相关的应用接口,顶层是三维仿真软件.三维仿真软件主要包括了场景资源初始化加载、三维场景管理、关键事件与视点控制、仿真动画控制、粒子系统控制、数据驱动、弹道数据筛选、弹道外推、地球自转及轨道推算、测站自动跟踪、多屏切换、场景配置等主要功能模块.关键流程如下:软件初始化时基于OSGEARTH加载地球影像和高程数据从而构建三维数字地球场景,然后通过网络接收弹道、关键事件等各类任务数据,弹道数据经过筛选、插值处理后驱动飞行器位置变化,关键事件数据通过事件机制触发相应动画播放,各模块协同实现飞行器三维仿真.2.2 地球影像和高程数据的组织在三维数字地球的构建过程中,涉及到地球的影像和高程数据的组织.软件通过OSGEARTH自动加载指定位置的影像和高程数据,叠加渲染在地球表面.考虑到影像和高程数据量大,非常消耗软硬件系统资源,而全国产化平台的性能一般,因此必须对影像和高程数据的加载进行优化.图1 软件系统架构图对于影像数据,地图影像数据量很大,10级全球地图影像大约需要15 GB,而道路标注影像数据相对较小.考虑到高精度影像数据不但占用空间,在进行三维场景渲染时也非常耗费资源,影响渲染效率.因此,软件采用分区域分层方式加载不同精度影像数据,共分三层:底层采用中等精度级别(如10级)的全球地图影像,中间层采用较高精度级别(如16级)的全球道路标注影像,上层采用较高精度级别的各发射场区域地图影像(如11-16级).当在火箭起飞离地面较近、可视地域较小时调用发射场区域的高精度数据,当火箭或飞行器远离地面、可视地域较大时调用全球低精度数据,而道路标注层数据量不大,采用全球高精度数据.对于高程数据,同样存在数据量大的问题,但简单地通过上述方式加载高程数据无法避免出现较明显的“地形断裂”现象.因此,软件仅在中国区域加载了一层中等精度级别(如10级)的高程数据,其他区域未使用高程数据.当火箭起飞至进入大气层前,恰在中国区域范围内,此时距离地面较近,加载中等精度地形,当火箭进入大气层后,此时距离地面较远,高空俯瞰对地形的关注程度降低,没有加载地形基本不影响整体演示效果.通过差异化的加载策略,在不同场景切换时,影像和地形不会出现明显突变现象,最大限度地减少了实时渲染的数据量,有效提升了渲染效率,保证了流畅的仿真效果. 2.3 三维场景的组织与构建OSG中存在场景树的概念,这棵树是一棵由Node(节点)组成的树,反映了场景的空间结构和可绘制对象的状态.场景树结构的顶部是一个根节点,从根节点向下延伸,各级树枝上的Group节点(组节点)包含了几何信息和用于控制其外观的渲染状态信息,底层的Geode节点(叶节点)包含了场景中物体的实际几何信息[15].通过建立场景树,OSG可以高效地渲染对应的三维场景.根据场景树的定义,构建出整个三维仿真场景对应的场景树结构,如图2所示.图2 三维场景组织图顶层的rootNode是整个场景的根节点,第二层的earthNode表示整个地球节点,所有具体的场景节点都隶属于该节点控制,第三层的earthPATNode是地球惯性系旋转节点,可以控制地球自转,其下属所有节点均随着该节点的旋转变化而进行相应的相对变化,第三层有3个分支:左侧的skyNode及其下各级节点是通过OSGEARTH加载外部的影像和高程数据后自动创建的,描述了天空和地球地形;中间的earthGroup是包含了各种附属于地表模型的组节点,第四层的3个节点分别代表测站、星下点轨迹和发射塔架,第五层及以下均是各类测站、星下点轨迹和发射塔架的具体组成节点;右侧的rktRootNode是火箭的根节点,第四层的rktLocalMT是火箭局部位移节点,用于完成火箭整体模型加载后从模型坐标系到真实火箭坐标系的转换,其下各级节点是火箭的各级部件和载荷的分层节点,centerMTNode是火箭中心位置节点,用于在火箭部件分离后火箭中心位置的调整,其下的节点是火箭轨迹线叶节点.某级节点的旋转平移就可以改变对应仿真对象的位置姿态,增加和删除某个节点就可以显示和隐藏相应仿真对象.在运行时,OSG将会按照以上的场景树结构逐层裁剪、渲染三维场景,通过合理、灵活地组织、调整场景树,即可高效地完成场景的渲染,有效提升在全国产化平台上的渲染效果.2.4 弹道数据筛选方法通过网络接收以驱动飞行器模型的弹道数据可能存在非正常数据(主要是相对飞行时出现跳动),因此在后端弹道数据插值处理前应先进行相应的筛选,避免不必要的计算处理,有效提升飞行器仿真流畅程度.整体流程只要满足网收启动的条件就循环执行.内部基本流程如下:首先,如果没有新数据到达或为非弹道类数据,则结束本轮处理,否则继续根据弹道数据和起飞时间计算当前弹道飞行时间rt,获取本地飞行时间lft(每秒自动计算当前本地时间与起飞时间之间的差值),并获取上一帧弹道数据的飞行时间rt0;然后,判断rt和rt0的大小,如果rt小于rt0,则数据非法,结束本轮处理,否则继续判断rt和lft的绝对误差,如果误差超过阈值Threshold,则数据非法,结束本轮处理,否则数据合法,继续完成弹道数据插值处理并更新数据引擎驱动模型的位置变化,转入下一轮处理.整体流程如图3所示.2.5 弹道外推自动控制在飞行器飞行过程中存在滑行段的过程,即一段时间没有弹道数据更新,或者突发的链路故障导致没有弹道数据更新,但飞行器模型的位置却不能中断更新,因此需要设计自动启停的弹道外推控制机制,根据当前速度和位置矢量预测飞行器的位置和速度,保证飞行器位置连续更新.软件中设计了弹道计数监视器DDMonitor和弹道外推驱动器PredictDriver,弹道计数监视器用于监视接收的弹道数据的计数并产生启动和停止信号,弹道外推驱动器用于实际控制弹道外推的启动和停止,这两个类都是线程类,主体函数Run函数在各自的线程中执行.当DDMonitor每隔固定时间进行轮询,如果判定进入滑行段则向PredictDriver发送DDStop信号,PredictDriver启动弹道外推,如果判定退出滑行段则向PredictDriver发送DDRecover信号,PredictDriver停止弹道外推.弹道计数监视器DDMonitor的轮询控制流程如图4所示,其中tSinceLast表示距离上次收到有效弹道后轮询的次数,isHXD表示滑行段标志(true为滑行段,false为非滑行段),isStart表示线程运行标志,lastCount表示上次收到的有效弹道计数值,maxSpan表示判定进入滑行段的最大轮询次数.图3 弹道筛选流程图2.6 测站自动跟踪在飞行器仿真过程中,需要显示各测站到目标飞行器的跟踪状态.当目标飞行器相对于测站出地平,即仰角大于等于0度,测站开始跟踪,显示跟踪线,当目标飞行器相对于测站入地平,即仰角小于0度,测站停止跟踪,隐藏跟踪线.基于目标跟踪的原理[16],通过OSG中节点更新回调机制实现测站自动跟踪.某个测站到目标飞行器的跟踪线通过跟踪线场景节点对象lineNode定义,lineNode节点注册一个节点回调对象TTCNodeCallback.测站自动跟踪的流程是这样的:当渲染整个三维场景的场景图且遍历至lineNode节点时,会自动调用回调函数并传入该测站的地理位置信息和飞行器目标节点对象targetNode,根据targetNode获取当前时刻目标的地理位置信息,从而计算出该测站到目标节点的仰角E.如果E<0,则清理lineNode的显示缓存,隐藏跟踪线,否则用测站和目标的位置信息更新lineNode的顶点信息,刷新lineNode的显示缓存,从而显示跟踪线.图4 弹道计数监视器轮询控制流程图2.7 基于地惯坐标系的地球自转设计在航天器分离后,需要根据轨道根数推算航天器飞行轨迹并展示.基于地惯坐标系的轨迹能形成趋于闭合的大椭圆轨迹,符合航天器在轨态势显示的需要. OSGEARTH中的世界坐标系是按照地固坐标系定义的,原点在地球中心,x轴向右(指向本初子午面),y轴指向屏幕里,z轴(地轴)向上.在该坐标系下地球是静止的,而地惯坐标系下地球是自转的.因此需要实现坐标系的转换和地球的自转.首先,进行坐标系转换.采用瞬时真赤道地心系(一种地惯坐标系)定义场景的坐标系统,而地固坐标系与它的差别即地球自转角——格林尼治恒星时S0[17].因此,在系统初始化时根据当时时刻计算S0,让地球绕z轴旋转S0角度,完成地球初始位置的设定.然后,实现地球的自转.在场景树中,地球是其中的一级节点,利用OSG中节点更新回调机制控制地球节点进行连续角度的旋转变化,从而实现地球的自转效果.地球节点注册一个节点回调对象EarthRotate Callback,当渲染整个三维场景的场景图且遍历至地球节点时,会自动调用回调函数并传入地球节点对象,回调函数的流程如图5所示,其中t0表示当前时刻值,lastT表示上一次回调时刻值,dt表示本次回调与上次回调的时间间隔,Span表示更新地球旋转的时间间隔(例如,按照1秒24帧的刷新频率,Span就设置为1/24秒),EarthRotSpeed表示地球自转角速度常量(7.292e-5 rad/s),deltaZaw表示dt时间间隔对应的地球自转角度.图5 地球自转回调函数流程图2.8 多屏输出与切换控制实际应用中,三维仿真窗口常需投影到外部设备(如超长超宽屏幕)进行全屏演示,这种需求往往通过分别部署于两个平台的控制端和显示端软件进行通信来实现.软件利用支持多屏输出显示的显卡和Qt中QDesktopWidget多屏显示[18]技术实现了同一软件在同一平台上进行多屏扩展显示与切换控制的效果,降低了软件结构的复杂性,避免了对网络通信的依赖,有效提升了在全国产化平台环境下切换控制的可靠性.以扩展3屏显示为例说明.在多屏显示环境的系统中,应用程序所在屏幕默认为主屏幕(screen 0),其他屏幕都是扩展屏幕(screen 1,screen 2,…),主屏幕的左下角屏幕坐标为(p.x,p.y).整个扩展显示区域横跨了3个扩展屏幕,其左下角坐标为(p.x+p.width,p.y),宽度e1.width+e2.width+e3.width,高度为p.height,其中p、e1、e2、e3分别表示主屏幕和3个扩展屏幕,width表示屏幕的宽度,height表示屏幕的高度,如图6所示.图6 多屏显示区域的定义在切换扩展显示时,首先按照上述定义扩展显示区域对象extWinGeometry,设置其宽度和高度;然后,将软件界面中的仿真演示窗口部件对象viewerWidget设置为扩展窗口extendWindow的中央窗口部件,将extendWindow的显示区域设置为extWinGeometry,设置extendWindow为无边框显示模式;最后,更新显示extendWindow即可实现扩展3屏效果.这样,主屏幕显示软件的控制界面,扩展的3屏显示仿真演示窗口.3 国产平台下的仿真验证在研发机房部署仿真验证环境,包括两台工作站,一台是国产化工作站(飞腾1500A、16 GB内存、1 TB硬盘、AMD RX570独显、银河麒麟操作系统4.0.2),部署航天三维仿真软件,一台部署数据仿真重演软件及数据处理软件.仿真重演软件加载仿真数据发送到数据处理软件经处理后,模拟任务网络环境向三维仿真软件发送数据,验证三维仿真的可靠性和渲染效率.仿真重演软件以100帧/s的帧频发送数据,三维仿真软件接收、仿真渲染均正常.飞行器三维仿真全过程中,仿真环境逼真、飞行器位置和姿态调整流畅,实时监测结果如图7所示,实时采集的三维渲染性能统计结果如表1所示.图7 三维仿真渲染效率实时监测结果表1 实时采集的三维渲染性能统计统计指标含义值帧速率每秒钟渲染帧数(fps)28.78事件处理时间每帧事件处理时间(ms)1.72更新时间对场景树遍历更新时间(ms)0.43拣选时间对场景树遍历拣选时间(ms)1.32绘制时间对场景树遍历绘制时间(ms)6.81 GPU渲染时间显卡GPU渲染时间(ms)28.65几何体数当前渲染的几何体数量(个)496三角形数当前渲染的三角形数量(个)207 862顶点数当前渲染的顶点数量(个)311 578根据实时渲染性能统计,在绘制几何体和三角形数量较大的情况下,平均渲染帧率不低于24 fps,能够较好满足三维仿真的需求.测站跟踪、模型动画、地惯坐标系下轨迹效果如图8至10所示.图8 测站跟踪图9 火箭助推器分离动画4 结论本文基于OSGEARTH设计和实现了一款国产航天三维仿真软件,通过地球影像和高程数据的差异化加载、场景树的优化构建、弹道数据筛选等设计策略,解决了在全国产化平台上进行三维仿真的可靠性和渲染效率问题,并通过仿真实验进行了验证.图10 空间目标在地惯坐标系下的轨迹下一步的研究方向:(1)进一步研究大规模地形组织和渲染效率的优化问题,使得软件加载更大范围、更高精度的地形成为可能;(2)在现有软件基础上,进一步实现可视化任务完成情况快速评估功能,并拓展至空间态势感知领域.参考文献【相关文献】1 张云燕,张科,李言俊,等.基于STK的月球任务设计与仿真.火力与指挥控制,2008,33(11):13-16.[doi:10.3969/j.issn.1002-0640.2008.11.004]2 范纪松,任辉,史红艳.STK三维战场态势研究与实现.火力与指挥控制,2017,42(6):132-135.[doi:10.3969/j.issn.1002-0640.2017.06.030]3 吴晓雪,王魏,李响,等.基于osgEarth虚拟校园漫游的研究.现代电子技术,2017,40(20):18-21.4 王雷,丁华.基于OSGEarth的大型三维空战场景的搭建.软件,2016,37(1):114-116,131.[doi:10.3969/j.issn.1003-6970.2016.01.025]5 于艳超,许捍卫,吴小东.基于OSGEarth的城市三维地物模型组织与调度研究.测绘与空间地理信息,2014,37(11):63-67.[doi:10.3969/j.issn.1672-5867.2014.11.018]6 韩哲,刘玉明,管文艳,等.osgEarth在三维GIS开发中的研究与应用.现代防御技术,2017,45(2):14-21.[doi:10.3969/j.issn.1009-086x.2017.02.003]7 陈波,任清华,杨化斌.基于OSGEARTH的三维数字地球平台设计与实现.电子科技,2015,28(10):65-68.[doi:10.3969/j.issn.1009-6108.2015.10.034]8 吴小东,许捍卫.基于OSGEarth的城市三维场景构建.地理空间信息,2013,11(2):107-110.[doi:10.11709/j.issn.1672-4623.2013.02.034]9 余航.基于OSG的战场态势三维可视化关键技术研究[硕士学位论文].西安:西安电子科技大学,2017.10 赵小丹.基于OSG的航天任务三维仿真系统研究与实现[硕士学位论文].重庆:重庆大学,2015.11 连云霞.基于OSG的运载器与航天器飞行仿真系统研究[硕士学位论文].太原:中北大学,2018.12 闫大洲.基于osgEarth的卫星轨道外推数据可视化仿真系统研究[硕士学位论文].太原:中北大学,2018.13 杨亮.空间任务视景仿真系统的设计与实现[硕士学位论文].北京:中国科学院研究生院(空间科学与应用研究中心),2007.14 肖鹏,刘更代,徐明亮.OpenSceneGraph三维渲染引擎编程指南.北京:清华大学出版社,2010.41-42.15 Wang R,Qian XL.OpenSceneGraph 3.0:Beginner’s Guide.Birmingham:Packt Publishing Ltd,2010.93-94.16 简仕龙.航天测量船海上测控技术概论.北京:国防工业出版社,2009.254-255.17 刘林.航天器轨道理论.北京:国防工业出版社,2000.17-21.18 金大臣尔.Qt5开发实战.张红艳,译.北京:人民邮电出版社,2015.77-79.。
基于GIS三维可视化仿真技术的虚拟战场地形研究
基于GIS三维可视化仿真技术的虚拟战场地形研究作者:陈冬云来源:《硅谷》2011年第01期摘要:军事行动的空间基础是战场环境。
战场环境的仿真是目前军事作战模拟领域研究的热点,而虚拟战场的构建是当前军事仿真领域中的一个非常前沿性的课题。
探讨GIS在仿真虚拟战场环境生成中的应用,比较全面的介绍构建GIS三维可视仿真技术的虚拟战场环境所涉及到的各种技术。
关键词: GIS;三维可视化;虚拟战场环境中图分类号:TP3文献标识码:A文章编号:1671—7597(2011)0110061-01随着社会对于地理信息的需求不断增加和计算机硬件性能的大幅度提高,战场环境仿真技术也相应的飞速发展起来。
作战模拟是对包括战争规律和战争指导规律两个方面在内的战争本质规律的模拟,最重要的一点就是要创造一个仿真实战性的训练环境,使得受训人员能在此环境中得到恰如其分的训练。
利用基于GIS三维动态可视化仿真技术,场景建设和图像处理技术,开发出关于某一特定战场地形区域真实全面的虚拟战场地形环境系统,使指挥人员有身临其境的体验。
1 GIS简介及其可视化原理1.1 三维GIS简介。
地理信息系统(即GIS)是一门集计算机科学、信息学、地理学等多门科学为一体的新兴学科,它是在计算机软件和硬件支持下,运用系统工程和信息科学的理论,科学管理和综合分析具有空间内涵的地理数据。
由于二维GIS数据模型与结构理论和技术上已经成熟,图形学理论、数据库理论技术及其它相关计算机技术的进一步发展,加上市场强烈的应用需求,三维GIS的研究与发展日趋走向成熟。
近几年人们把GIS技术用到战场地形的研究上,已经取得了不小的进步。
1.2 GIS可视化原理。
GIS可视化是科学计算可视化与地学结合而形成的概念,是关于GIS 数据的视觉表达与分析。
GIS的可视化对地学数学模型的研究包括地学数据内插加密,多分辨率数据表达、多维表数据显示、实时动态处理、并行技术、交互反溃技术,数据的可视化等,偏向于技术层次。
GIS三维可视化仿真技术的虚拟战场地形研究

基于GIS三维可视化仿真技术的虚拟战场地形研究首先讨论了GIS的概念及相关技术,重点讨论了基于GIS三维可视化仿真技术的虚拟战场地形的关键技术和实现过程。
包括:基于GIS实现的原理,虚拟战场地形的建模,可视化的操作和分析。
并结合实例进行了说明。
实验结果表明用该方法开发的虚拟战场三维地形环境仿真系统具有良好的用户界面和形象逼真地动态地形显示效果。
近年来,随着GIS和虚拟现实(VR)技术的发展,军事演习和指挥决策在概念上有了新的飞跃,通过建立虚拟作战实验室来进行军事训练和研究。
利用基于GIS三维动态可视化仿真技术,场景建模技术和图形图象处理技术,开发出关于某一特定的战场地形区域的真实全面的虚拟战场地形环境系统,包括战场地形、地理要素、交通、气象、水文、电磁、核生化沾染区域等信息的显示以及图上包括地形量算、地物统计、道路网络分析、通视分析、坡度分析、通行分析、隐蔽分析、高度带分析、剖面分析等等功能。
使指挥人员有身临其境的体验。
1GIS及其可视化原理1.1GIS简介地理信息系统(GIS)是一门地学空间数据与计算机技术相结合的新型空间信息技术。
它以空间数据库为基础,在计算机软硬件的支持下,对空间数据进行采集,管理,操作,分析和显示,并采用地理模型分析法,适时提供多种空间和动态地理信息的计算机系统。
近几年来把GIS技术用到军事上的战场地形的研究已经取得了不少的进步。
1.2基于GIS的图形表达GIS中的图形以矢量表示和存储的。
图形的实质就是空间点在三维平面的投影,可以分解为:点,线,面,体等几种不同的图形元素。
因为矢量化图形的各个部分可以用数学的方法加以描述,可以对其进行任意的变换,放大,缩小,旋转,变形,移位,叠加等,并保持图形的空间拓扑关系不变。
而且矢量图形的基本组成是点,线,面,体,可以进行单独定义,控制,操作,分析,查询图形对象的空间信息及其相关的属性信息。
1.3基于GIS的战场地形信息的组织GIS将空间实体对象用空间数据和属性来共同描述并分别存储。
水下战场环境虚拟仿真系统
(1)海洋自然环境库,主要包括:温度,盐度,密度和声 速,水色,透明度,海流,海底等数据。
(2)作战应用产品库,主要包括:会聚区参数,中尺度特 征以及环境季节性特征化参数等。 1.3 水声环境仿真平台
水声环境仿真平台主要由水声环境并行仿真系统和作战 应用产品制作系统组成,完成舰艇作战海域三维水声战场环 境的快速、高精度仿真计算以及水声环境作战应用产品制作。
(3)水声环境仿真模型主要包括声线轨迹、声传播、噪声、 声纳探测以及决策参数提取模型等。
(4)虚拟战场环境仿真模型主要包括海浪、海底地形、声 线管束、三维数据场、环境光等可视化模型。
3 关键技术
水声环境仿真及其战场环境体可视化技术是水下战场环 境仿真系统诸多复杂技术中最为关键的 2 大部分。
—222—
可视化仿真训练平台是仿真系统与作战指挥员交互训练 的接口,主要由主控台、态势设定、二维参数分析、作战决 策、三通道可视化显示系统以及人机交互设备组成。
(1)系统主控台主要完成系统仿真过程控制,包括仿真模 型设定、系统同步、仿真进程控制、视景控制、目标跟踪与 绑定、仿真过程复现控制等。
(2) 战 场 态 势 设 定 主 要 完 成 基 于 电 子 海 图 的 战 场 态 势 的 初始化、态势编辑以及仿真过程中的动态显示,包括作战海 域、舰艇类型、位置、运动要素、海况、作战时间等。
2
(
z
,r
)−ν
l2(
r
)⎤⎥⎦2
⎫⎪8 ⎬ ⎪⎭
0
<
z
<η l
η l
≤
z
≤ξ l
ξ l
基于虚拟现实技术的战场环境仿真

基于虚拟现实技术的战场环境仿真
基于虚拟现实技术的战场环境仿真,可以帮助军事部门进行实际战斗前的模拟和训练,以提高作战效率和减少人员伤亡。
以下是一些关键技术:
场景建模和渲染:使用3D建模软件创建战场模型,包括地形、建筑、道路、车辆、人员等元素,并将其渲染为逼真的虚拟环境。
交互体验:使用虚拟现实头戴式显示器、手柄等设备,以及声音、震动等反馈技术,使军事人员可以身临其境地体验战场环境。
例如,可以通过模拟爆炸和枪声等音效来提高真实感。
数据采集和分析:利用传感器和视频监控等技术,收集和记录军事人员在虚拟战场中的行为和表现,以及实时分析和反馈数据,以提高训练效果和决策能力。
团队协作:基于虚拟现实技术,可以模拟复杂的战场作战环境和情况,让军事人员进行团队协作和配合演练。
例如,在强化实战训练中,士兵可以在虚拟实境中执行特定任务,如指挥中心、掩体、扫雷等,以
进一步提高作战技能。
基于虚拟现实技术的战场环境仿真,可以帮助军事人员更加充分准确地模拟、评估和训练战场环境和作战策略,提高作战效率和减少人员伤亡。
专业军事三维地理信息系统EV-Globe应用

专业军事三维地理信息系统EV-Globe应⽤三维战场环境仿真系统三维战场环境仿真,就是利⽤计算机三维视景仿真技术和虚拟现实技术,根据现实或想象构造⼀个⽣动的、效果真实、直观三维虚拟场景,⽤户可以在之中任意漫游,甚⾄根据仿真需要改变场景。
结合运⽤数据库技术、多媒体技术,还可以将战场信息数据库融合于三维虚拟场景中,⽤户可以在三维可视化环境中进⾏构建复杂的战场环境,可将⽆形的作战能⼒可视化,将有形的实体装备形象化,对⽬标物进⾏交互操作,查询、分析、统计和辅助决策⼯作。
战场环境三维可视战况进程动态掌握作战单位实时查询⾃然环境仿真电磁环境仿真战场态势及打击三维仿真系统基于作战仿真数据库的战场态势三维仿真系统将传统的战场态势利⽤虚拟现实技术、数据库技术和地理信息技术有机结合起来,形成⼀个具有实时创建、动态管理、交互控制、基于三维空间分析的虚拟战场环境三维仿真系统。
基于⼆维基础地理数据,实现战场地形信息、地物信息、武器装备模型库等基础信息数据库的快速建⽴,并通过对战场三维仿真的研究,为部队作战指挥、研究地形、战场态势显⽰、模型的实时显⽰、地理查询、实现快速漫游和多兵种⽹上对抗等,提供可视化、⾃动化的作业⼿段,为作战仿真提供基础信息的⽀持。
战场⼒量分布敌我态势识别打击过程仿真打击效果仿真数字三维战区军事地理信息系统数字三维战区军事地理信息系统是为满⾜战区作战指挥保障的需要,以数字⽅式组织、存储、管理战区战场环境信息,运⽤三维地理信息系统技术、遥感处理技术和⽹络技术提供多种形式的战场环境信息服务,并辅助指挥员规划、控制战场的技术系统。
该系统是与战区作战指挥⾃动化系统相匹配的战场环境信息平台,也是数字化战场的重要组成部分。
综合性。
集图⽂、声像为⼀体的多媒体信息系统,并将多⽐例尺的空间信息(数字地形图)与专题属性信息(地理实体特性描述)按应⽤需求分层次地结合起来,能提供多种形式的环境信息,以满⾜战区指挥员分析战场、研究战法的需要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
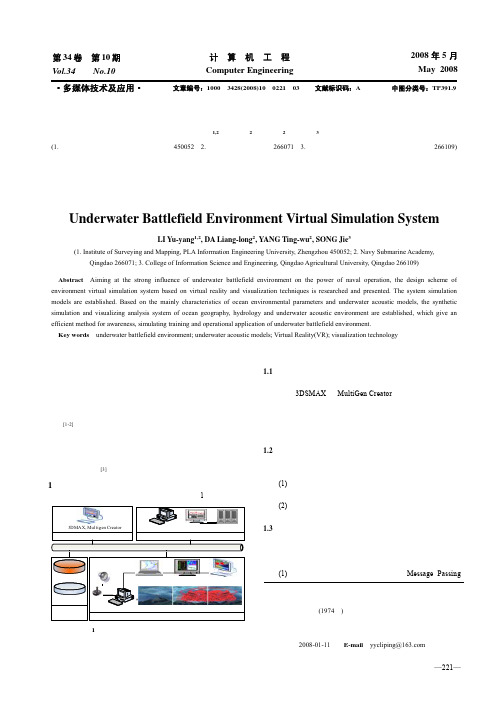
—269—基于数字地球的虚拟海战场环境仿真曾 鹏1,陈长征1,李苏军2(1. 北京市947信箱10分箱,北京 100083;2. 国防科技大学多媒体研发中心,长沙 410073)摘 要:分析传统海战场仿真方法的不足,提出以数字地球平台为基础来实现大规模虚拟海战场环境仿真的思路,从基于数字地球的大规模海洋表面生成、三维战场实体嵌入以及利用想定驱动虚拟海战场环境仿真3个方面展开虚拟海战场环境仿真技术的研究,通过实验给出实际的仿真效果。
关键词:仿真;数字海图;数字地球;虚拟海战场;想定驱动Simulation of Virtual Sea Battlefield EnvironmentBased on Digital EarthZENG Peng 1, CHEN Chang-zheng 1, LI Su-jun 2(1. The 10th Sub-box of 947 Letter Box in Beijing City, Beijing 100083;2. Multimedia R&D Center, National University of Defense Technology, Changsha 410073)【Abstract 】This paper analyzes the deficiency of traditional simulation methods in virtual sea battlefield, and proposes the idea of realizing the simulation of large-scale virtual sea battlefield based on the digital earth. It extends the research on simulation technology of the virtual sea battlefield from three facets of large-scale ocean surface rendering based on digital earth, embedment of the three-dimensional combat entity and scenario-driven simulation of the virtual sea battlefield environment. The effect of simulation is given. 【Key words 】simulation; digital chart; digital earth; virtual sea battlefield; scenario-driven计 算 机 工 程Computer Engineering 第35卷 第8期 Vol.35 No.8 2009年4月April 2009·开发研究与设计技术·文章编号:1000—3428(2009)08—0269—02文献标识码:A中图分类号:TP391.411 概述随着海洋战略思想的深入人心,世界各国军事研究人员一直对虚拟海战场环境的建设极为关注。
从早期的SIMNET 计划到面向21世纪建立的下一代战争演练系统WARSIM ,美军已初步建成数字陆战场;并计划到2030年实现陆战场的全面数字化,同时建立虚拟海战场和空战场;拟在2050年前后建成陆海空天一体化的虚拟战场。
目前,美军已经具备满足陆、海、空、特种部队等多军兵种军事训练的能力,并能实现虚拟与实际武备的对接,部分成果已用于一定规模的联合军事演习中。
从目前国内发展情况来看,虚拟海战场的建设还停留在训练模拟器材等面向小区域的海上场景,而在面向大规模海战场态势的分析和理解时,指挥员仍普遍采用传统的基于数字海图的态势标绘和二维作业推演。
造成这种现状的主要原因有:(1)海平面广阔,时空粒度与尺度跨度较大。
(2)海浪受力复杂,其波动受到重力、摩擦力、科氏力等各种力的综合影响。
(3)时空互动。
海浪是一个流体,海洋现象不但空间和时间上是动态的,更多的是时空互动,因此,很难用一个通用的方程来表示。
(4)战场实体的嵌入以及实体与海战场环境间的交互较为复杂。
然而,随着海战场感知手段的不断增强,海战场环境保障方式开始向数字化、可视化、多比例尺三维海图方向发展,以纸质海图、二维电子海图和沙盘为主的海战场环境保障手段已无法满足信息战的迫切需求。
随着数字地球和数字海洋的提出以及虚拟现实技术、计算机技术和数据仓库技术的快速发展,展开基于数字地球的虚拟海战场环境仿真技术的研究能够为我军海上作战、训练和海上抢险救灾以及多军兵种联合作战提供良好的信息保障和技术支持。
2 基于数字地球的海洋表面生成数字地球与数字海洋的提出为虚拟海战场与数字地球的结合提供了契机,也为虚拟海战场环境建设提供了良好的基础平台[1]。
在该平台实现了三维虚拟海战场环境的生成,主要体现在海洋球面生成、LOD 球面高度网格生成和海面光照效果模拟等方面[2]。
2.1 海洋球面生成由于地球的球体特性,要构建基于数字地球的海洋表面模型必须在三维球面上进行。
这需要求解海洋表面各点(x , y ,z )的值,同时考虑时间因素t ,生成动态海洋表面 h (x , y , z , t ),转换为经纬度坐标即h (a , β, t ),该点的实际高度值为surface surface (,)(,)(cos ,)h h f αβαβαββ=+⋅⋅N 其中,cos β为修正值;surface N 为(a ,β)切平面的法向量。
得到某时刻t 海洋表面各点的高度值就可以实现某时间点t i 海洋表面的生成,如图1所示。
图1 海洋表面点的高度值与对应的效果图作者简介:曾 鹏(1978-),男,博士,主研方向:虚拟现实,计算机仿真;陈长征,高级工程师;李苏军,博士研究生 收稿日期:2008-09-20 E-mail :zengpeng_chsh@2.2 海洋场景的球面高度网格生成数字地球的一个重要特点是支持多视点、多视角的场景无级缩放和无缝漫游,数字地球球面上的海洋水体同样必须满足以上特点[1]。
海洋表面的水体是无限连续的,在使用计算机图形技术时需要用多边形表现,因此,必须把表面离散化。
网格采样是一种常用的表面离散化方法,决定对高度场中的哪些点采样。
LOD是数字地球地形渲染普遍采用的高度场绘制方法,其思想可以用于海洋球面高度网格的生成,但用于动态的海洋表面绘制时,必须考虑以下问题:(1)LOD海洋表面高度网格的生成对静态地形数据进行预处理时,其每一小块可以是任意的多边形,从而满足边缘的紧密衔接。
但水体在渲染时需要动态生成,因此,不能依赖预处理。
为此,需要对传统地形LOD的方法进行改进:在静止状态时,球面海洋的每一个网格都覆盖同样大小的屏幕区域,然后将屏幕上显示的海面区域均匀细分成四边形网格,将每格后向透视投影到静止海面,就可获得海面上对应的非均匀分布的球面瓦片位置,如图2所示。
图2 不同视点和视距的LOD球面高度网格(2)海洋边界的判断与绘制对海洋表面进行绘制时,一个很重要的问题是对海洋与陆地边界的交汇判断,这对于港口、岛屿毗邻地区目标的分析和判断具有重要意义。
一种方法是利用卫星影像数据实现海洋边界的判断,其基本思想与利用矢量数据类似,区别在于:它根据计算得到的球面点坐标,依据卫星影像确定该点处于海洋区域或陆地区域。
该方法的局限主要在于卫星影像数据的精度制约,这在面向战术级别的高分辨率场景绘制中尤为重要。
另一种方法是利用海洋边界矢量数据确定屏幕上所需绘制的海洋区域,将绘制区域细分为网格,计算各网格点对应的可视球面点的世界坐标;利用该坐标确定该网格点的可见性,对于一个面片,只要4个网格点中有一个可见,则面片可见。
利用矢量数据的缺点在于其可视地球边界处海洋表面会存在明显的“锯齿”现象,如图3所示,面向视点的某个面片组成点中可能存在部分点背向视点,这将导致生成的场景中出现“锯齿”,因此,必须设计“点剔除算法”予以解决。
图3 利用矢量数据绘制海洋场景的“锯齿”现象(3)海洋场景的动态背面剔除背面剔除用来剔除背向视点的多边形。
通常采用几何测试方法决定一个三角形是否背离视点。
先计算三角形的法向量N p和视线向量N,然后计算两者夹角。
当N p·N <0时,根据需要,将背离视点的面片剔除,只绘制符合需要的三角形面片。
2.3 海面光照效果模拟由于海战本身涉及作战海域的广度和范围交大,因此基于数字地球的海洋表面场景绘制通常考虑一定数量级以上的较大范围海区,由此避免使用基于物理模型的方法计算高度真实感的海水表面颜色,从而在绘制真实感海洋表面的颜色和明暗度时,仅考虑来自于天空和周围自然环境的光线反射和折射[1]。
根据以上思想,可以考虑用立方体纹理图的方法计算海面光线的反射。
这种方法只考虑一次光线追踪,能在计算量较小的情况下生成具有一定真实感的画面。
折射效果的表现主要考虑水体颜色和海底地形地物的合成。
通常在实际的绘制过程中,为减小场景绘制的复杂度,水体颜色主要考虑某几种典型情况下的颜色,而海底地形地物只在特定的情况下加以考虑。
3 虚拟海战场中的三维实体嵌入基于数字地球的虚拟海战场环境以多视点多视距的无缝集成方式实现了传统二维数字海图向三维虚拟海战场环境的转化。
三维作战实体的嵌入同样将取代传统的二维军标,从而实现完整的二维作战视图向三维视场的转变。
(1)实体的三维建模与导入实体的三维建模与导入过程为:1)根据实际的战场实体尺寸建立相应的三维模型,将该模型文件转换为系统所需要的文件格式。
2)加载实体三维模型,并进行纹理与材质的设定。
3)建立实体的局部坐标系,通常以实体重心为原点、正(反)向为x轴、向上(下)方向为z轴,如图4所示。
y图4 三维实体模型的导入与局部坐标系(2)作战实体的运动建模与绘制作战实体的运动建模与绘制过程主要包含动力学模型和运动轨迹表现模型,如图5所示。
图5 作战实体的运动建模与绘制(下转第273页)—270——273—果,并提取机器码传输给客户端。
客户端通过Socket 接口接收机器码并置入RTL 模型和SystemC 模型,2个模型分别产生各自的结果,并实现第1次比对。
比对正确后将一致的结果传输到服务端的软件测试接口与软件模型生成的结果实现第2次比对,该次比对验证的结果被记录入Log 文件用于核查。
图4给出验证平台的软硬件模型生成结果的例子。
图4 软硬件验证过程的具体实现4 运行与测试为对验证平台的性能做一个评估,采用2台主频为 1.8 GHz 的计算机分别做客户端与服务端,客户端模型在VCS 环境下运行,服务端的仿真模型用高级编程语言C++编写并在Linux 环境下运行。