遥控飞机使用常见故障
揭秘为什么遥控飞机飞不稳?
文件来源于:
揭秘为什么遥控飞机飞不稳?
很多新手朋友买了遥控飞机回去就会发现一个问题,飞机飞不稳?不是原地打转就是左右平移。
怎么回事?酷吧简尚生活网现在为你揭秘为什么遥控飞机会出现飞不稳的原因。
------关键就在飞机是不是内置陀螺仪。
遥控飞机陀螺仪是什么?简单的说,是一种定向器。
遥控飞机陀螺仪与一般陀螺仪用途效果完全不一样,是一个旋转物体的旋转轴所指的方向在不受外力影响时。
用它来保持方向,制造进去的东西就叫遥控飞机陀螺仪。
高速旋转的主桨像一个旋转中的陀螺,由主旋翼 ( 主桨 ) 发生升力。
带有飞机陀螺效应
1 定轴
同时反抗任何改变转子轴向的力量,当陀螺转子极高速旋转时产生的惯性使陀螺转子的旋转轴保持指向固定的方向。
这种物理现象称为遥控飞机陀螺仪的定轴性。
转子的质量、旋转半径、速度越大,定轴性越大。
2 逆动
旋转轴并不会沿施力方向运动,如有外力作用在旋转中的陀螺转子旋转轴上。
而是顺着转子旋转方向顺延 90 度垂直于施力方向不会改变。
3 操控
装备了遥控飞机陀螺仪元件的飞行玩具或航模,在控制和飞行功能上,具有非常稳定逼真效果,可与真机堪比。
所以当遥控飞机出现原地打转就是左右平移(比较轻微的,不太稳定那种)的情况时,只要试试看遥控器上面的微调,一般都是按键式的或是滚轮式的小按钮。
向飞机旋转相反的方向调整,左右微调一下到飞机不旋转了就可以了。
文件来源于:。
遥控类基本知识
遥控飞机、遥控车基本知识玩具遥控飞机:遥控飞机目前最常见的大概分类两种,一种是红外线遥控的,另一种是无线电遥控的,一、红外线遥控飞机(遥控距离大概在10米左右,也就是三层楼高)目前我们这里的红外线遥控飞机大概分两种,一种是带“陀螺仪”的,还有不带“陀螺仪”的。
陀螺仪是装在电路板上的一个小配件,主要起到平衡飞机的作用,初学者一般都建议买带陀螺仪的。
不带陀螺仪的飞机一般我们称为3通道遥控飞机,这种在空中会打转,前进、后退、左转、右转初学者不容易操作。
带陀螺仪的飞机一般称为3.5通道,此种遥控飞机在空中可悬停(简单理解就是停在空中某个地方飞行),前进、后退、左转、右转对初学者来说都是比较容易上手的。
红外线飞机还有一种是4通道的,4通道具备有3.5通道飞机的所有功能以外,还多了一个侧飞的功能。
功能区别:2.5通道只能上下左右3.5通道:上下左右前后4.5通道:上下左右前后侧飞红外线遥控飞机的特点:小巧轻便,在室内随便操作都不会对家具、家电等造成损坏。
外出方便携带,飞机没电的时候,还可用遥控器直接给飞机充电。
红外线遥控飞机的缺点:白天的时候不能在室外飞行,会受到光线的干扰而导致无法遥控到飞机或是信号中断等…在来抗风能力小,稍微有点会影响到飞机的前进后退。
二、无线电遥控飞机(遥控距离大概在25-30米左右)我们这里的无线电遥控飞机目前有两种.一种是双浆的,也就是有两层机翼。
另外一种是单浆的只有一层机翼。
无线电遥控飞机现在大多都是带陀螺仪的,个头一般都比红外线遥控飞机大些,长度有30多厘米的、40多厘米的、60多厘米的还有80厘米左右的,抗风能力稍微强一点。
在室外不会受到光线的干扰,可在室外飞机,不过有风的情况下也是不容易操控的。
而单浆的遥控飞机特别说明下:此种飞机抗风能力较强,在室外一般风力下都是可以来去自如的操作的,无论是反应速度快慢或是前进后退、左右侧飞等都是相当给力的。
遥控飞机的遥控器:遥控飞机的遥控器分两种,一种是可脱控悬停的,一种是不带脱控悬停的。
新舟-60飞机APS-85自动驾驶仪系统典型故障
设备管理与维修2019翼10(上)新舟-60飞机APS-85自动驾驶仪系统典型故障王跃菲(海军航空兵某团机务大队三中队,北京102443)摘要:新舟-60飞机自动飞行控制系统依靠驾驶员的指令和方式选择输出信号,提供给驾驶员完整的自动驾驶和飞行指引功能。
对APS-85自动驾驶仪系统在飞行中出现的一起典型故障进行分析与探讨,通过相关的经验总结分析,以期对该系统的维修保障工作提供借鉴。
关键词:自动驾驶仪;典型故障;维修保障中图分类号:V267文献标识码:B DOI :10.16621/ki.issn1001-0599.2019.10.160引言新舟-60飞机采用的APS原85自动飞行控制系统是数字化的自动驾驶仪系统,能够以良好的性能控制飞机。
当使用自动驾驶仪系统时,它能操纵飞机,并且驾驶员依靠电子飞行仪表系统的显示可以监控飞机飞行轨迹;当解除自动驾驶仪系统时,驾驶员还可以根据EADI 上的指令杆的指令,利用驾驶盘和驾驶杆进行人工操纵飞机,该系统可以满足域类进场的要求。
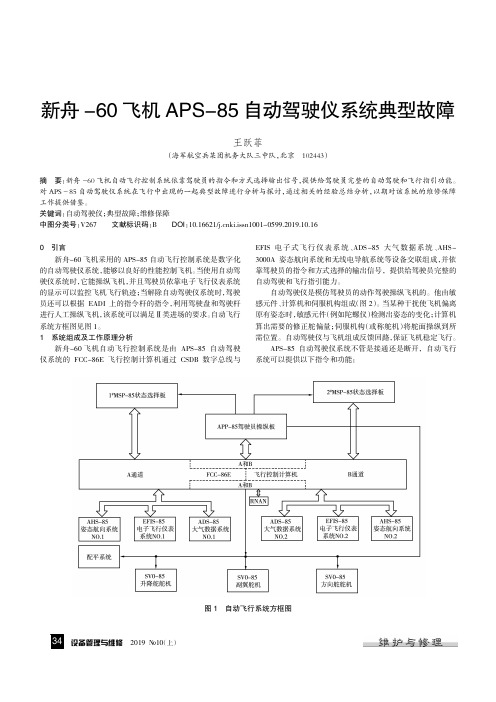
自动飞行系统方框图见图1。
1系统组成及工作原理分析新舟-60飞机自动飞行控制系统是由APS原85自动驾驶仪系统的FCC原86E 飞行控制计算机通过CSDB 数字总线与EFIS 电子式飞行仪表系统、ADS原85大气数据系统、AHS原3000A 姿态航向系统和无线电导航系统等设备交联组成,并依靠驾驶员的指令和方式选择的输出信号,提供给驾驶员完整的自动驾驶和飞行指引能力。
自动驾驶仪是模仿驾驶员的动作驾驶操纵飞机的。
他由敏感元件、计算机和伺服机构组成(图2)。
当某种干扰使飞机偏离原有姿态时,敏感元件(例如陀螺仪)检测出姿态的变化;计算机算出需要的修正舵偏量;伺服机构(或称舵机)将舵面操纵到所需位置。
自动驾驶仪与飞机组成反馈回路,保证飞机稳定飞行。
APS原85自动驾驶仪系统不管是接通还是断开,自动飞行系统可以提供以下指令和功能:图1自动飞行系统方框图设备管理与维修2019翼10(上)·保持希望的姿态·航向方式可以截获和保持选择的航向·导航方式可以截获和跟踪选择的无线电航道(VOR 、LOC 、GS )和横向导航航道(GPS )·进场方式可以截获和跟踪确立域类进场最低量的信标台和下滑道·半倾斜(1/2BANK )方式可以减少正常横滚极限的50%·性能选择方式·爬升方式·下降方式·保持气压高度·保持垂直速度·保持指示空速·截获和保持预选高度·复飞方式可以给出机翼水平和俯仰上仰姿态·喘流方式(TURB )可以在喘流状态下减小自动驾驶仪的增益·同步方式(仅仅飞行指引系统)可以使任一驾驶员可操纵飞机改变垂直方式基准或同步到飞机的现行垂直基准·具有俯仰自动配平功能·计算操纵显示输出·系统完整的警旗输出·具有故障诊断功能并显示输出2故障现象新舟-60飞机在某次飞行中按计划爬升至1000英尺后接通自动驾驶仪系统,系统工作正常。
遥控直升机飞行常见问题分析及解决方法
遥控直升机飞行常见问题分析及解决方法遥控直升机飞行常见问题分析遥控直升机能飞多高,多远?取决于爬升率和电池容量和飞机的飞行高度与飞行距离是由遥控设备的安全遥控距离和目视距离所决定的。
为什么直升机起飞时会向左或其他地方偏移,而不是笔直的起飞?那是由于陀螺效应与主桨下洗气流的影响,所以一般直升机在起飞时向左倾斜是正常的!需要略微的向右打些副翼控制杆(右手水平控制杆),而不能通过副翼微调修正,等观察稳定悬停后机体的左右侧移的情况再调整副翼微调。
如果向其他的方向偏移可以在地面上时通过微调进行修正。
模型直升机能在空中飞多久?通常飞行的时间(留空时间)多少主要是由动力系统决定的。
(如电动直升机使用的电动机功率大小和携带的电池的电压与容量);充满电正常飞行时间为8-10分钟左右;做特技飞行的话只能飞4-5分钟左右。
遥控直升机飞行操作难的原因?遥控直升机的飞行操作难主要是由于两大原因造成的:一、直升机的自稳定性是不能与固定翼飞机相比的。
除了共轴双桨结构的直升机之外,还没有任何一款直升机可以在不控制状态下可以较长时间稳定的漂浮在空中,都必须时刻保持高度集中的精神控制;二、初学者在一开始还未在大脑中形成对控制方向的一种条件反射,往往会在飞机处于某种飞行姿态下,给直升机发布错误的动作指令,而直升机却不能给操控者足够的时间去更正,而造成坠地。
遥控直升机起飞倾斜的原因?受陀螺效应与主桨下洗气流的影响,遥控直升机在起飞时倾斜是正常的,需要略微的向右打些副翼控制杆(右手水平控制杆),而不能通过副翼微调修正,等观察稳定悬停后机体的左右侧移的情况再调整副翼微调。
如果向其他的方向偏移可以在地面上时通过微调进行修正。
遥控直升机能在空中悬停吗?机型有能在空中悬停这个功能的都可以的。
切记一定要在遥控器控制的范围内!遥控飞机尾部锁不住,往一边转怎么办?1)检查遥控飞机陀螺仪看是否调到最佳的位置,没有调好会出现两种情况,分别是大副度左右摆动与小副度左右摆动。
遥控飞机维修

遥控飞机维修
大家在玩遥控飞机的时候可能会遇到某种情况,如果是初玩者,遇到问题可以先在网上进行查找,看解决方法,今天,我就给大家介绍一些问题的维修方法。
孩之乐玩具,买的放心,玩的开心。
如果飞机总是偏到一个方向,飞不起,那么是没有小错误也可以微调键,根据飞机调整遥控器的遥控方向在相反的方向微调按钮以上。
当全电飞机,还不能飞,所以请注意检查,是否平衡梁上下面的连杆折断,在叶片内侧断了。
身体不是飞得很直,总是在一个方向上的偏差,如果飞机总是偏了方向,请确保不受影响的情况下的空气,可以调整微调键,可以调整远程控制根据飞机上的微调按钮相反的方向。
一、当飞行时身体会颤抖,飞的有点偏
1、平衡梁的不平衡,很好的改变平衡梁。
2、请检查平衡梁上面的8个按钮,如果有好的,两边的扣不扣内,只要是好的安装按钮就变成一架飞机,不要挂在里面)如果边扣边只是成为一架飞机,飞机将有点不平衡。
3、在螺旋麻花两侧的叶片不是很均匀,对汽车钢板的螺钉,撕下叶片周围的螺钉松动,
二、飞机供电电开了,但灯不亮
1、飞机是关机的,请关掉飞机的电源开关
2、电池线以上了,可以去除头看,检查线头,焊好了!
三、新上手的飞机还是没有转弯
1、请检查上叶连接的齿轮,如果它运行,或破碎,可以从飞机的底部的机器下面分开,再次确定或更好的齿轮。
2、检查电机,看线是否松动,否则电机出了问题,找修理焊接,或者你可以换电机。
孩之乐遥控飞机,买的放心玩的开心,在你开心玩耍的同时,不要忘记分享给大家哦!。
无人飞行器技术操作中的常见问题及解决方案

无人飞行器技术操作中的常见问题及解决方案随着无人飞行器技术的快速发展,越来越多的人开始使用无人机进行各种任务。
然而,在无人飞行器的操作过程中,常常会遇到一些问题。
本文将探讨无人飞行器技术操作中的常见问题,并提供相应的解决方案。
一、飞行器飞行稳定性问题在飞行器的操作过程中,很多人会遇到飞行不稳定的情况。
这可能是由于飞行器的重心不平衡、风的干扰或操控技术不熟练等原因所致。
为了解决这个问题,首先需要确保飞行器的重心平衡,可以通过调整电池位置或增加配重来实现。
其次,应该选择飞行环境较为稳定的天气条件,避免在强风天气中飞行。
最后,提高操控技术的熟练度,可以通过多次练习和参加培训课程来提升。
二、飞行器遥控信号干扰问题在一些复杂的环境中,例如城市或人口密集区域,无人飞行器的遥控信号可能会受到干扰,导致飞行器失去控制。
为了解决这个问题,可以采取以下措施。
首先,选择频率稳定的遥控器和接收器,以减少外界信号对飞行器的影响。
其次,避免在人口密集区域或大型建筑物附近飞行,以减少信号干扰的可能性。
最后,定期检查和维护飞行器的遥控设备,确保其正常工作。
三、飞行器电池寿命问题无人飞行器的电池寿命是一个常见的问题,特别是在长时间飞行任务中。
为了延长飞行器的电池寿命,可以采取以下措施。
首先,选择高质量的电池,以提高充电和放电效率。
其次,避免在极端温度下使用电池,因为极端温度会影响电池的性能。
此外,合理规划飞行任务的时间,避免长时间飞行,以充分利用电池的容量。
四、飞行器安全问题无人飞行器的安全问题是一个需要高度重视的问题。
为了确保飞行器的安全操作,可以采取以下措施。
首先,了解并遵守当地的无人机法规和规定,避免违反相关规定。
其次,选择合适的飞行环境,避免在人口密集区域或禁飞区飞行。
此外,定期检查和维护飞行器的各个部件,确保其正常工作。
最后,购买适当的保险,以应对意外情况。
总结:无人飞行器技术的快速发展为我们提供了许多便利和机会。
然而,在操作无人飞行器时,我们也会遇到一些常见问题。
米—8直升机自动驾驶仪常见故障的分析

米 8 直升机自动驾驶仪常见故障的分析
曹 栋 徐 道 琦 费 景 荣
海军飞行学院
摘 要 米 8 直升机飞行时 自动驾驶仪的工作使用能改善飞机性能 方
便飞行员的操作 同时 自动驾驶仪的 疲劳
即故障 又是影响飞行
训练的重要因素 因此 飞行员如何全面了解自动驾驶仪的使用特点 熟 练
飞行员为制止冲动而操纵的动作量要适当 动作量太小 不能有效地制止冲动 动作量太大将会引起反冲动 根据自动驾驶仪舵机权限 20 特点 飞行员的动 作 量应在全程的 20 30 之间 即驾驶杆向前 或后 移动 34 51 毫米 向 左 或 右 移 动 27 40 毫米 脚蹬向前 或 后 移动 18 障特征及原因
图 操纵运动过程
故 障 型 式 及 原 因 自动驾驶仪故障根据其外部表现归纳为四种 1.直升机稳定性和操纵性变差 2.直升机缓慢地偏离预定状态 3.直升机摆动 4.操纵机构急剧单方向偏转到极限位置 自动驾驶仪的故障主要来自三个方面 1.自动驾驶仪各部件故障 如线路老化 短路 断路 元件损坏等 2.交联部件故障 如左地平仪 航向系统故障等 3.人为使用不当 如自动驾驶仪工作时使用 航向给定 开关 按压左地平仪 起
使 用 特 点 自动驾驶仪的俯仰和倾斜通道可以在起飞到着陆所有的飞行过程都接通工作 为
了不影响飞行员的操纵效能 采用了补偿传感器 在飞行员操纵时 补偿传感器发出 相应信号使操纵机构发生位移 开始时效能略高 操纵机构的总位移 S 等于杆操 纵的位移 Sn 加补偿传感器操纵的位移 S An 即
S Sn + S An 直升机偏转后 自动驾驶仪信号也使操纵机构发生位移 S An 则操纵机构的 总位移为 S Sn + S An S An 选 S An S An 则 S Sn 最终的操纵效能不变 方向通道也可以在起飞到着陆的飞行全过程接通 但当飞行员操纵时 蹬脚蹬 方向通道自动断开 松脚蹬后方向通道自动接通工作 高度通道必须在 50 米以上高度才能接通 飞行员在需要操纵直升机改变高度时
飞机电子线路的常见故障及维修

飞机电子线路的常见故障及维修飞机电子线路是现代航空器中不可或缺的组成部分。
它们向飞行员提供必要的信息和指令以确保航行的安全和有效性。
然而,电子线路也会遇到故障。
以下是一些常见故障及其维修方法。
1. 故障短路故障短路指的是两条电子线路之间产生了非预期的连接。
这种故障可能是由电线间的绝缘材料被切割或磨损导致的,也可能是由电线间的插头未正确插入而导致的。
这种故障可能导致电子设备过热或电源短路,因此必须立即修复。
维修方法:使用短路探测器来检测故障是否发生于两条电子线路之间。
在发现故障点后,必须修复电线间的任何损坏并重新连接插头。
如果问题不能很快解决,必须更换受影响的电子部件。
2. 电线磨损长时间的使用和摩擦可能会导致电线磨损。
这种问题可能会导致电线的绝缘材料受损甚至短路。
有时,磨损可能是由电线被钢丝、管道或其他航空器零件磨损导致的。
维修方法:必须更换任何出现磨损的电线。
在更换电线时,必须使用同样规格的电线,并确保连接器正确连接以防止未来的问题。
3. 膨胀或收缩有时,航空器中的温度变化会导致电线或连接器的膨胀或收缩,导致电线松动或连接器分离。
这种问题可能在飞机从寒冷的高海拔区域飞往热带的时候发生。
维修方法:必须重新连接电线和连接器。
在重新连接电线之前,必须先对连接器和插头进行清洁和检查。
确保它们没有任何的老化或损坏,如果出现问题,必须对其进行更换。
4. 涉及软件的问题电子设备的软件是确保其正常工作的关键。
然而,软件出现问题可能会导致设备不可用。
这种问题可能是由数据损坏、缺失的文件、不兼容的软件版本或人为错误导致的。
维修方法:要解决软件问题,必须首先进行诊断,找出问题发生在哪个程序或哪个阶段。
然后,必须尝试恢复文件或数据,安装正确版本的软件或重新编写软件代码。
在修复软件问题之前,必须将设备从系统中断电或关闭,以防止产生更多的问题。
总结。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
22)、上/下螺旋桨转动速度太慢(飞不起来) 电池没电,电机坏,接收板坏 23)、前进/后退反 24)、接收距离近 25)、左/右方向反 26)、无微调功能 27)、拨杆功能接触不良 28)、指示灯暗 29)、充电插头接触不良 30)、电源开关失灵 电机线焊反
遥控器没电,操作空间内光线太强或太落 换电池 换场地 主电机负级线焊反 遥控器坏 电微器没焊到位,拨杆未装到位 遥控器没电 充电插头坏 开关坏 焊好线 换发射板 换板 换电池 换充电插头 换板 装好拨动杆
主电机掉线,电压低,接收板坏
充电插座假焊,开关坏,电以满,充电器坏 焊板 换板 测电压 换充电器
电机配对不良,电池坏,螺旋桨变形 发射头坏,电压低,天线未锁好 接收头坏,电压低,接收板坏 平衡杆紧,拉环变形,主轴断裂, 电压低,发射板坏
换电机 换电池 换螺旋桨
换板 测电压 查看天线是否接触好
换板测 电压 换胶件 换电池 换发射板 换场地
遥控飞机常见故障 问题描述
1)、不能启动飞行 2)、飞不高 3)、失去转向、不向左或向右 4)、飞机指示灯不亮 5)、飞行晃动 6)、飞行转圈 7)、尾螺旋桨不转ቤተ መጻሕፍቲ ባይዱ 8)、上/下螺旋桨不转动 9)、充不进电 10)、飞行时间短 11)、遥控器没发射功能 12)、飞机没接收功能 13)、斜飞 14)、指示灯闪烁 15)、遥控失控 16)、自动发射/接收 17)、无陀螺功能 18)、识别定向时间长 19)、带陀螺飞行时不平稳(打转) 20)、飞行时发抖 21)、无前进/后退
原因
接收板坏,电压低 飞机电压低,电机配对不良 接收板烧坏/摔坏 电压低,接收板坏
平衡杆紧,拉环变形,主轴断裂 1电机配对不良 2螺旋桨变形 3牙仔卡死
解决方法
先充电册测试后换板 充电,测试电机 换板 充电,换板 更换胶件 1换电机 2换螺旋桨3试调牙仔 换电机 焊线 换家收板 焊线 充电 换板
电机坏,掉线,接收板坏
电量不足,操作空间内光线太强或太落 换电池 发射板坏 线焊错,接收板坏 接收板坏 电机配对不好,牙仔卡,主轴弯 主轴弯,螺旋桨没琐好,螺旋桨变形 尾电机坏,尾电机掉线,接收板坏 换发射板
焊好线 换接收板 换接收板 换电机 试调牙仔 换主轴 换主轴 锁好螺旋桨 换螺旋桨 换电机 焊好线 换板 充电 换电机 换板 焊好线