智能灭火机器人的控制系统设计与实现
智能机器人灭火功能的实现

毕业设计(论文)题目智能机器人灭火功能的实现系别专业班级学生姓名学号指导教师年月智能机器人灭火功能的实现摘要:智能灭火机器人系统控制器模块以嵌入式微处理器ARM9为核心,传感器模块主要由红外测距传感器和远红外火焰传感器组构成,驱动器模块由大功率伺服直流电机和普通直流电机组成.依据沿墙行进规则和程序设计模块来完成机器人遍历房间、寻找火源并将其熄灭的程序编程.通过该设计完成的智能机器人系统可在8 s内完成任意房间的灭火,达到了国际先进水平,同时还提高了机器人运行的可靠性.我国科学家对机器人的定义是:"机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器"。
智能机器人是 21 世纪新的热点,也是一个国家整体实力的显示。
智能机器人是一个多学科的综合,涉及机械设计和制造、传感器、控制与规划、电子电气、计算机与信息处理、通讯、能源、材料、系统工程。
AS-UII 是面向教育的新一代智能移动机器人。
AS-UII 有一个功能强大的微处理系统和传感器系统,而且它还能扩展听觉、视觉、和触觉,成为真正意义上的智能机器人。
关键词:智能机器人、灭火、AS-UIIThe realization of the function of intelligent robot fire Abstract:intelligent fire-extinguishing robot system controller module ARM9 processor with embedded microcontroller as the core, and sensor module mainly consists of infrared range-finding sensors and far-ir flame of sensor, the drive module by a high-power constitutes a servo dc motor and ordinary dc motor. According to travel along the wall design module rules and procedures to complete the robot to traverse the room, looking for fire and its out of the programming. Through the design of intelligent robot systems can be completed in August finish any room s. extinguishing, have reached the international advanced level, but also improve the operation reliability of the robot.The definition of Chinese scientists for robots is: "robot is a kind of automatic machines, what is different this machine has some of people or biological similar intelligence capabilities, such as perception and planning skills, action ability and synergy, is a kind of highly flexible automation machine". Intelligent robot is the 21st century new hot spot, also is a country overall strength display. Intelligent robot is a multidisciplinary integrated, involving mechanical design and manufacturing, sensor, control and planning, electrical and electronic, computer and information processing, communications, energy, materials, systems engineering.AS the UII is an education - a new generation of intelligent mobile robot. AS UII have a powerful - the micro processing system and sensor system, and it also can expand hearing, vision and touch, became a true sense of intelligent robot.Keywords:intelligent robot、put out the fire、AS UII目录前言 (6)第1章智能机器人AS-UII (7)1.1AS-UII的内部结构 (7)1.2AS-UII的控制按键部分 (7)1.3对AS-UII进行编程 (9)第2章传感器、微处理器与驱动器 (11)2.1智能机器人的三大要素 (11)2.2能力风暴的传感器及其处理电路 (12)2.2.1碰撞传感器 (12)2.2.2红外传感器 (15)2.2.3光敏传感器 (17)2.2.4麦克风 (17)2.2.5光电编码器 (18)2.2.6其他传感器 (19)第3章能力风暴编程 (21)3.1 让机器人动起来 (21)3.1.1在 VJC1.5 开发版窗口中编写流程图 (21)3.1.2保存源代码程序 (22)3.1.3程序下载 (22)3.1.4运行程序 (22)3.2让机器人感知环境信息 (22)3.2.1编写流程图 (23)3.2.2保存程序 (24)3.2.3程序下载 (24)3.2.4运行程序 (24)第4章能力风暴编程 (25)4.1 让机器人动起来 (25)4.2让机器人动起来 (26)4.3让机器人动起来 (27)致谢 (29)参考文献 (30)前言最近几十年中,大量的高层、地下建筑与大型的石化企业不断涌现。
智能灭火机器人的设计与实现毕业论文

目录前言 (3)1 绪论 (4)1.1 选题的背景及意义 (4)1.2 国外发展 (4)1.3 国内发展 (4)2 灭火机器人相关理论与技术基础 (5)2.1 灭火机器人相关理论 (5)2.2 基本特征 (5)2.2.1 可行性 (5)2.2.2 有效性 (6)2.2.3 国家主导 (6)2.2.4 必要性 (6)3 灭火机器人体系结构与系统组成 (6)3.1 电源模块 (7)3.2 驱动模块 (7)3.3 光电传感器模块 (7)3.4 火焰传感器模块 (7)3.5 主控制模块 (8)3.6 灭火风扇模块 (8)4 灭火机器人安全技术 (9)4.1 报警技术 (9)4.2 火源探测技术 (9)4.3 安全可靠性 (9)5灭火机器人的设计与实现 (9)5.1 灭火机器的设计 (9)5.2 材料的收集与功能 (10)5.3 灭火机器人电路图的设计 (11)5.4 电路焊接 (12)5.5 灭火机器人的组装 (13)5.6 灭火机器人的调试 (13)参考文献目录 (17)致谢 (18)智能灭火机器人的设计与实现摘要:在我国乃至世界经济发展的今天,机器人成为不可缺少的人类好帮手。
而智能灭火机器人是一种新型的机器人。
而本文就是针对灭火机器人制作与研究,机器人以AT89C52单片机为控制核心。
主要以电源模块、电机驱动模块、避障传感器模块、火焰传感器模块、灭火风扇模块等电路组合而成。
用电机驱动芯片驱动通过避障传感器控制小车前进、后退、左右转。
火焰传感器对火焰探测实现风扇对准火源。
来实现灭火风扇进行灭火。
本设计制作的灭火机器具有准确、有效、简易的灭火功能,从而实现了现场灭火的目的。
关键词:灭火;传感器;电机驱动前言在经济高速发展的时代社会,现在城市到处都是高楼大厦。
如果在几十层或更高层出现火灾或无法接近的火灾现场,这都给消防队员带来了巨大的救援工作。
这个时候消防部门需要一种特殊的灭火与救援设备,而智能灭火机器人正是两者兼具的设备。
基于单片机的灭火机器人控制系统设计与实1

超声波传感器
超声波传感器可以测量 3~200cm 范围内的物体的距离, 并通过模拟信号连接到 控制器上。精度高达1cm,并且非 常稳定。直观易与使用。机器人的启动我们是用声音启动。 通过超声波传感器进行启动,当声音达到一定的分贝的时 候,控制器通过超声波感性到的声音进行寻火。
超声波传感器参数:
致谢
在毕业设计期间,我很感谢宋老师的耐心指导和细心教导, 这使我对灭火机器人有了新的认识和更系统的学习,也感 谢我们学校给我提供这么好的机会进行学习,并提高自己 的专业能力和心理素质。感谢大家的帮助。让我能够如期 完成毕业论文。
软件介绍
我们在编程的时候使用c语言编程,用的软件是VJCstudio 进行程序的编写和修改,这款软件是在 VC6.0基础 上进行修改的。在 c程序进行编写的时候软件可以现实错 误说在地址和原因,我们可以有目的的去修改和改进。软 件具有简单易懂,易学好用的特点。
调试
先将底盘上的电机位置固定,连接控制器,在给固定的直 流电源,使底盘能够向直线行走和转弯,分别调试红外寻 线板和红外避障电路,使有反射光接收到后使信号输出为 一个高电平,供控制器进行检测。在安装好以上模块后, 再检查一次,保证位置合理,能正常得检测到外部情况。
2015 基于单片机的灭火机器人控制系统设计与 实现
指导老师:
姓 专 名 :
王亦军
于德春
业 :电气工程及其自动化
主要内容
设计来源背景说明
研究目的与意义 硬件介绍 软件介绍 调试
课题来源
在人类文明的悠久长河中,对机器人的梦想和追
求已有 3000 多年的历史。今天人类已经步入信息
基于单片机系统的无人环境灭火机器人的设计与实现

基于单片机系统的无人环境灭火机器人的设计与实现一、背景介绍随着现代化城市的建设,大量高楼大厦的发展已经成为了城市化进程中的一个重要标志,但与此同时,高楼大厦在建筑结构方面的设计复杂度也随之增加,这就给防火工作带来了极大的挑战。
当前,传统的火灾处理方式主要由消防员进行,但由于高楼的高度和结构的复杂性,人工防火存在着一定的缺陷和局限性。
如今,随着无人技术的发展,无人环境灭火机器人越来越受到人们的关注,它可以解决高楼防火难题,为人们的生命安全提供切实的保障。
二、设计方案无人环境灭火机器人系统主要采用基于单片机的控制器实现智能控制,其中包括雷达传感器、控制器、电池等组件。
在机器人的底部安装有两个轮子和一个悬挂支架,支架上安装有一种消防喷洒器械,当机器人探测到火焰时,机器人会自动移动到火灾现场并开始进行灭火。
机器人底部材料应该由具有良好散热性和高强度的金属制成,以确保机器人的稳定性和使用寿命。
三、实现流程1. 雷达传感器探测到火灾场景信号2. 控制器接收到输入信号进行信号处理3. 控制器根据处理结果控制机器人移动至火灾场景进行灭火4. 机器人利用喷洒器械进行喷洒,将消防液体喷洒至火场上以达到灭火的目的5. 当火场被消灭后,机器人自动返回基地并待机四、关键技术1. 火灾场景的探测技术:机器人所使用的探测技术必须能够精准地探测到火灾位置和范围。
此处可以采用红外线、热成像和光学技术,使机器人可以迅速准确地找到并灭火火源。
2. 智能控制技术:基于单片机实现智能控制,包括机器人方向控制、喷洒控制等功能的实现。
3. 机器人结构设计技术:机器人底部的材料应该具有良好的散热性和高强度,机器人的重量、体积、稳定性等方面都需要进行充分考虑和设计。
4. 喷洒器械设计技术:喷洒器械需要具备高效喷洒、均匀喷洒等特点,同时需要考虑机器人悬挂装置的稳定性和支撑能力。
五、总结此设计可以有效地替代传统的人工消防灭火,为高层建筑提供更好的消防保障。
智能灭火机器人的设计与实现
第18卷第3期电子设计工程2010年3月V01.18No.3ElectronicDesignEngineeringMar.2010智能灭火机器人的设计与实现李小燕,陈帝伊,马孝义(西北农林科技大学水利与建筑工程学院电气系,陕西杨凌712100)摘要:根据国际灭火机器人的比赛规则,给出灭火机器人的软硬件设计。
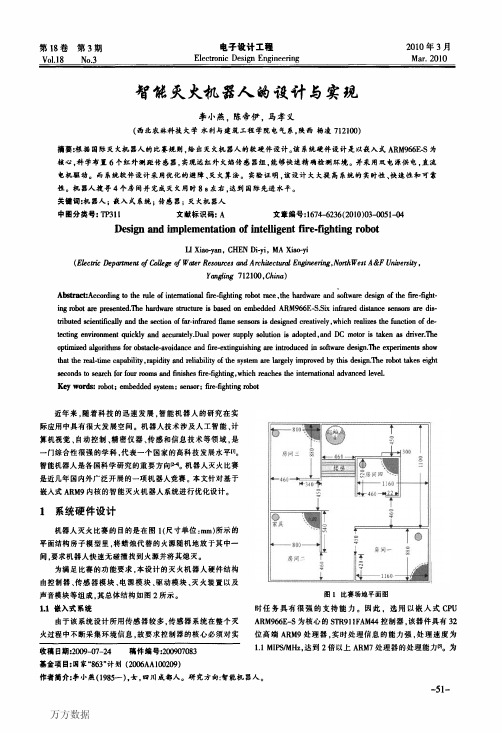
该系统硬件设计是以嵌入式ARM966E.S为核心,科学布置6个红外测距传感器,实现远红外火焰传感器组.能够快速精确检测环境。
并采用双电源供电,直流电机驱动。
而系统软件设计采用优化的避障、灭火算法。
实验证明.该设计大大提高系统的实时性、快速性和可靠性。
机器人搜寻4个房间并完成灭火用时8S左右.达到国际先进水平。
关键词:机器人;嵌入式系统;传感器;灭火机器人中图分类号:TP31l文献标识码:A文章编号:1674-6236(2010)03—005l—04Designandimplementationofintelligentfire-nghtingrobotLIXiao-yan。
CHENDi-yi,MAXiao-yi(ElectricDepartmentofCollegeofWaterResourcesandArchitecturalEngineering,NorthWestA&FUniversity,Yansting712100,China)Abstract:Accordingtotheruleofinternationalfire—fightingrobotrace.theha”dw呲andsoftwaredesignofthefire-fight-ingrobota地presented.’nlehlLrdwal陀structureisbasedembeddedARM966E-S.Sixinfrareddistancesen¥ol暗a弛dis—tributedscientificallyandthesectiOHoffar-infraredflamesensolt篙isdesignedcreatively,whichrealizesthefunctionofde-teetingenvironmentquicklyandaccurately.Dualpowersupplysolutionisadopted,andDCmotoristakendriver.Theoptimizedalgorithmsforobstacle-avoidanceandfire·extinguishingintroducedinsoftwaredesign.Theexperimentsshowthatthereal-timecapability,rapidityandreliabihtyofthesystemlargelyimprovedbythisdesign.Therobottakeseightsecondstosearchforfourandfinishesfire.fighting.whichreachestheintemationaladvancedlevel.Keywords:robot;embeddedsystem;sensor;fire-fightingrobot近年来。
基于单片机的智能灭火报警机器人设计和实现

基于单片机的智能灭火报警机器人设计和实现摘要随着科技的发展、社会的进步,人类不断创造着奇迹,工业的生产跟管理一步一步的前进,不断的创新。
多数控制和管理走进了自动化、信息化、智能化,智能化已经变成了科技发展的主要技术。
在很多工厂车间、工作现场环境比较恶劣的时候,人工不能完成的任务像货物的运输,寻找火源,灭火等,可以采用智能机器人来完成相应的任务,不但省时间,而且省人力。
根据工厂车间的实际日常需要,维持车间的正常运转,研究跟开发智能灭火报警机器人便具有了重大的意义。
本设计主要研究了智能的消防技术,智能机器人以AT89C52单片机为MCU,加上电源电路、驱动电路、火焰传感电路、红外传感器、灭火风扇、蜂鸣器以及其他电路组成。
电源电路为机器人正常工作提供了所需要的电能,驱动电路为机器人提供了可控制的移动,火焰传感电路是发现火源的主要硬件,红外传感器主要判断路况,灭火风扇完成灭火,蜂鸣器用来报警。
本作品对硬件组成进行了设计,并编写了软件程序框图,设计的机器人具有简单的灭火功能,实现了现场灭火。
关键词:AT89C52,驱动模块,单片机,火焰传感器IAbstractDesign of Intelligent of Elimination of FlameAlarm Robot on MCUAbstractWith the development of science and technology, social progress, human beings continue to create miracles with the management of industrial production forward step by step , and constant innovation . Most of the control and management into the automation, information, intelligence , intelligence has become a major technical technological development. In many factory workshop, job site environment is bad , I can not complete the task as artificial transport of goods , looking for the source of fire , fire , etc. , you can use intelligent robots to accomplish the task , not only save time, but also the provincial manpower. According to the actual needs of the factory floor daily to maintain the normal operation of the plant , with the development of intelligent fire alarm research robot will have a great significance.The intelligent design of the main study fire protection technology , intelligent robots to AT89C52 microcontroller MCU, plus the power supply circuit , driver circuit, flame sensing circuit , infrared sensors, fire fans, buzzers , and other circuit components. Providing the power to work the robot needs, provides the driving circuit of the mobile robot can be controlled , the flame sensing circuit hardware is found primarily an ignition source , the main infrared sensor to judge the road, the fire extinguishing power supply circuit for the fan to complete , with the buzzer to the police. The work on the hardware components were designed and prepared a block diagram of a software program to design robots with simple extinguishing function to achieve a live fire.Key words: The AT89C52,Driver Module,MCU,Flame sensor目录摘要 (I)ABSTRACT (II)第1章 绪论 (1)1.1智能灭火报警机器人的设计背景和意义 (1)1.2智能灭火报警机器人的目标 (1)1.3主要内容 (1)第2章 智能灭火机器人系统设计介绍 (2)2.1智能报警灭火机器人系统功能概述 (2)2.2系统工作原理 (2)2.3系统整体方案选择 (3)2.3.1 MCU的选择 (3)2.3.2 传感器的选择 (4)2.3.3 电源模块的选择 (5)2.4系统硬件总体设计 (6)2.5系统软件总体设计 (6)2.6本章小结 (6)第3章 系统硬件设计 (7)3.1电源模块 (7)3.2AT89C52与核心模块 (7)3.2.1AT89C52单片机介绍 (7)3.2.2 AT89C52最小系统硬件电路 (9)3.3电机驱动电路的设计 (9)3.4循迹与控制电路 (12)3.5.1红外测温传感器 (14)3.5.2红外测温传感器引脚 (15)3.6蜂鸣器报警电路 (16)3.7灭火风扇设计 (17)第4章 系统软件设计 (18)4.1软件开发平台介绍 (18)4.2PWM(脉宽调制) (18)4.3软件设计思路 (19)4.4系统主程序流程图 (20)4.5循迹程序流程图 (20)4.6电机驱动模块流程图 (21)4.7报警及灭火控制程序 (23)4.8避障程序流程图 (24)4.9本章总结 (25)第5章 系统功能调试 (26)5.1测试仪器及设备 (26)5.2功能测试 (26)5.2.1电源线路连接测试 (26)5.2.2 循迹功能测试 (26)5.2.3 避障功能测试 (27)5.2.4 灭火及报警功能测试 (27)5.3调试心得 (27)第6章 系统部分模块代码 (28)6.1初始化程序代码 (28)6.3延迟函数代码 (29)第7章 结 论 (30)参考文献 (31)致谢 (32)附录A (33)附录B (35)第1章 绪论1.1 智能灭火报警机器人的设计背景和意义在现实生活中,火灾是非常普遍的,被称作是三大自然灾害之一。
灭火机器人的设计与实现

型钢混凝土柱确定轴压 比限值的方法 和钢筋混凝土柱确定轴压 比限 值的方法不 同在于考虑了钢骨含量对轴压比的影响。推导轴压 比时 ,为 推导公式方便 ,同样把外包钢骨转化为连续 的钢板 ,利用平截面假定和 外包钢的连续化 。
轴压力限值的试验值
l+ g y +Sa 1 L +L
+
2£
2×O.0O3
,
]=d(1 6 +l 27{ ·等 等 +o.34等 ·P )
…
式中:cL为抗震等级影 响系数 ,一 、二和三级分别取O.8、0.9和1.O; b,^为柱截面的宽和高 ;d为考虑钢骨腹板 的计算厚度 ,按文献 中公 式计算 ;p 为配钢管率。
2 采 用控 制轴 压 力 限值 (即 《型 钢 混凝 土 柱 》 轴 压 比 限值 )的 方法
图4 灭火 实 验 场地
参 考 文献 [1]刘海成 .AVR单 片机原理 及测控 工程应 用.北京航 空航天大 学 出版社 ,2008 [21朱玉 玺,崔如春 .等 .计 算机控 制技术 .电子工业 出版社 ,2005 【3惆 荷 琴,吴秀清 .微 型计算 机原理 与接 口技 术_中国科 学技术 大学出版社 ,2008 (4】杨恢先 ,黄辉先 .单 片机原 理与应用 .人民邮 电出版社 ,2006. [51郭天 祥-新概念 5l单 片机C语 言教程 .电子工业 出版社 ,2008.
巍霸
应 用科 学
107
钢 骨钢 管 混凝土 柱轴压 比限值 的讨论
蔡洪 洲 ,赫 芳 (1.中地海外辽 宁建 筑1-程有限责任公 司 ,辽宁沈阳 1 10034;2.辽 宁天维纺织研究建筑设计集 团有限公司 ,辽宁沈 阳 1 10015)
摘 要 提m界 限破坏时钢骨 一钢管混凝 土组 合柱轴压 比和轴力 比限值 。 关键 词 钢管 一钢骨混凝 土组合柱 ;界限破坏 ;轴 压 比限值 中 图分 类号 Tu 文 献标 识码 A 文章 编 号 1673~9671一(2010)081—0107—0l
可精准灭火的智能机器人设计
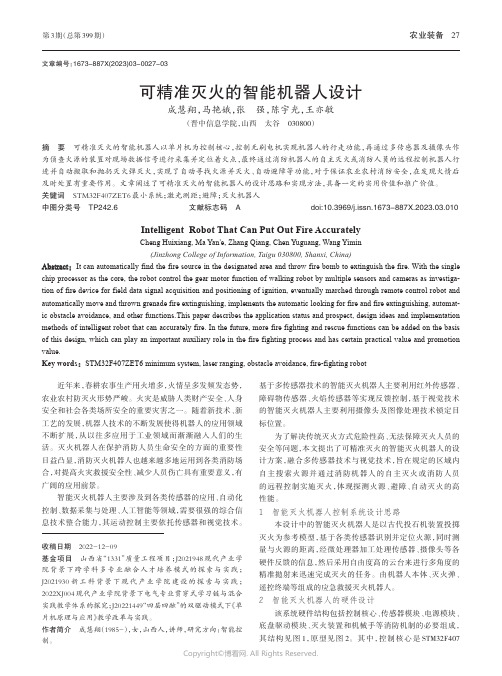
文章编号:1673-887X(2023)03-0027-03可精准灭火的智能机器人设计成慧翔,马艳娥,张强,陈宇光,王亦敏(晋中信息学院,山西太谷030800)摘要可精准灭火的智能机器人以单片机为控制核心,控制无刷电机实现机器人的行走功能,再通过多传感器及摄像头作为侦查火源的装置对现场数据信号进行采集并定位着火点,最终通过消防机器人的自主灭火或消防人员的远程控制机器人行进并自动搬取和抛扔灭火弹灭火,实现了自动寻找火源并灭火、自动避障等功能,对于保证农业农村消防安全,在发现火情后及时处置有重要作用。
文章阐述了可精准灭火的智能机器人的设计思路和实现方法,具备一定的实用价值和推广价值。
关键词STM32F407ZET6最小系统;激光测距;避障;灭火机器人中图分类号TP242.6文献标志码A doi:10.3969/j.issn.1673-887X.2023.03.010Intelligent Robot That Can Put Out Fire AccuratelyCheng Huixiang,Ma Yan'e,Zhang Qiang,Chen Yuguang,Wang Yimin(Jinzhong College of Information,Taigu030800,Shanxi,China)Abstract:It can automatically find the fire source in the designated area and throw fire bomb to extinguish the fire.With the single chip processor as the core,the robot control the gear motor function of walking robot by multiple sensors and cameras as investiga‐tion of fire device for field data signal acquisition and positioning of ignition,eventually marched through remote control robot and automatically move and thrown grenade fire extinguishing,implements the automatic looking for fire and fire extinguishing,automat‐ic obstacle avoidance,and other functions.This paper describes the application status and prospect,design ideas and implementation methods of intelligent robot that can accurately fire.In the future,more fire fighting and rescue functions can be added on the basis of this design,which can play an important auxiliary role in the fire fighting process and has certain practical value and promotion value.Key words:STM32F407ZET6minimum system,laser ranging,obstacle avoidance,fire-fighting robot近年来,春耕农事生产用火增多,火情呈多发频发态势,农业农村防灭火形势严峻。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Design and Realization of Intelligent Fire Fighting Mobile Robot
LI Xi, DU Gang, YUAN Yin, WEI Li-zhuo, YUAN Yin
(School of Information Engineering, China University of Geosciences, Beijing 100083, China)
Key words: intelligent fire-fighting; mobile robot; control system Abstract: Based on characteristics of Autonomous Mobile Robot, the hardware and software for intelligent fire fighting mobile robot were designed with EXP ATmega 128 as the controller. Moreover, the intelligent fire fighting mobile robot was assembled and tested. In the test, the actions of intelligent fire fighting mobile robot are easily controlled, which is of stable gesture during walking, can avoid the obstacle promptly and can detect the site of fire sources accurately.
四轮式自主移动机器人具有良好的稳定性、较
快的移动速度等优点;四轮式自主机器人能够在保
持车体姿态不变的情况下沿平面任意方向做直线 运动,理论上可在机器人所在的平面上以任意的角 度和速度运动,机动性增强,非常适合在空间有限、 狭窄、对机器人的机动性要求高的场所[7-8]。
在分析自主机器人特点的基础上,设计了四轮 驱动的智能灭火机器人。在模拟室内火场的试验 中,智能灭火机器人通过传感器来感知外部环境和 自身状态,自主运动,准确探测火源的位置并成功 灭火。
EXP Atmega128 控制器
灭火装置
ISP 下载模块
图1 控制原理框图
EXP ATMEGA128适配器板是以ATMEL公司 的ATMEGA128为核心器件的开发板。为方便程序 下载和调试提供ISP和JTAG接口,总线接口部分分 为P1、P2、P3、P4。电源模块LM1117-3.3将+5.0 V 电源降压为+3.3 V. +5.0 V电源为单片机提供电源, 选择D1发光二极管作为电源的指示。
计结构,以机器人左右方向作为X轴,5个红外接收 障碍物,准确探测火源的位置并成功扑灭火源。
230
辽宁工业大学学报(自然科学版)
第 32 卷
[2] Thorpe C, Hebert M, Kanade T, et al. Toward Autonomous
Driving: The CMU Navlab. Part I: Perception[J]. IEEE
句,判断I/O口返回值为低电平时,表明遇到障碍物,
灭火机器人的控制系统的主程序由下面几个
执行相应的避障语句,从而成功地躲避障碍物,否 主要的子程序构成:前进子程序模块、转向子程序
则继续检测。
模块、后退子程序模块、传感器子程序模块和停止
多通道的红外接收器组成的火焰传感器主要 子程序模块。灭火机器人的主程序流程图如图4所
避障传感器。左右两侧的避障传感器主要是用作机 入到房间后,火焰传感器的5个通道分别检测火焰
器人在走廊巡视时避免与左右墙壁相距太近而发 的强度,并将其转换成1~1024中的一个数值,同时
生碰撞;前方安装的避障传感器主要是用作配合左 保存在预先声明过的数组中。比较数组中保存的5
右传感器判断走廊拐角处,并且在机器人转弯时检 个数值,找到最小值并得到相应的通道序号;若最
5 通道 火焰传感器
数码管
继续工作;掉电模式时振荡器停止工作,所有的功 能都被禁止,即寄存器内容得到保留[9]。
EXP ATmega128 作为控制处理器,外围的控制 电路包括电源的稳压电路、4 个 LMD18200 直流电 机驱动电路、L298N 风扇驱动电路、传感器接口电 路等自主设计制作的电路板。
ATMEGA128是基于AVR的RISC结构的较低 功耗、CMOS 8位的一款单片机。通过在1个时钟周 期内执行一条指令,能获得接近1 M IPS/MHz的性 能,优化了功耗和执行速度。ATMEGA128具备如 下特点:8 K字节的FLASH. 512字节的EEPROM, 512字节的SRAM,53个通用I/O口。32个通用的工 作寄存器,具有比较模式的、灵活的定时器/计数器, 8通道10位ADC,内外中断源,可编程的UART,可 编程的看门狗定时器,SPI口以及6种可通过软件选 择的省电模式。工作于空闲模式时,CPU将停止运 行,而寄存器、定时器/计数器、看门狗和中断系统
自主移动机器人的研究开始于20世纪60年代。 斯坦福研究院的Nilsson[1]研究出名为Shakey的自主 移动机器人。
20世纪70年代后期,由于计算机技术和人工智 能技术的发展,自主移动机器人的研究取得显著的
成果,主要用于军事目的的室外移动机器人平台也 随之诞生。20世纪80年代以来,自主移动机器人逐 渐走向民用,一批装备有雷达、超声波、视觉、GPS 等多种传感器的室外自主移动机器人系统相继问 世,具有代表性的有美国CMU的Navlab系列[2-3]、 德国UBM的VAMP和VaMoRs系统[4-5],以及国内的 清华大学的THMR系列[6]等。
杜刚(1964-),男,北京人,副教授,博士。
228
辽宁工业大学学报(自然科学版)
第 32 卷
较低的能量消耗;机器人行走时具有较好的姿态稳 定性、合适的速度、较高的定位精度和较小的转弯 半径等。
通常情况下,动力系统采用比较简单的单电源 供电电路。因电动机起动瞬间电流很大,会造成电 源电压不稳,影响单片机和输入电路工作的稳定性 和可靠性,因此本文中的智能灭火机器人采用电机 电源和单片机电源完全隔离的多电源供电方案。
智能灭火机器人采用自动控制运行模式。智能 灭火机器人通过传感装置自动识别,自主采取动作 避开前进方向的障碍物,持续地探测火源相对机器 人的方位,并及时调整机器人运动的方向。智能灭 火机器人能沿着正对火源方向运动,最终顺利到达 火源附近位置并进行灭火。
3 软件设计
智能灭火机器人具有自由巡视走廊,能安全地 由走廊进入室内探测是否存在火源,并能确定房间 内的火源的确切位置并成功扑灭等功能。
测墙壁以确保机器人顺利地转入另一条走廊。
小值对应的通道序号不为2时,灭火机器人转动;
避障算法:根据传感器环路安装的结构,以机 当最小值对应的通道序号为2时,灭火机器人停止
器人左右方向作为X轴,5个光电传感器分别位于 转动,此时机器人刚好正对着火源方向,向前移动
0°、45°、90°、135°、180°的位置。程序开始执行 并接近火源灭火。
LMD18200驱动接口电路如图2所示。
R7 5.G1NKD GND
C16 103
L5
1 BOOYCAP OUT1 2
PB7 3 PD7 5
7 9
DIR PWM GND OVER
/ENABLE V+
I_SNS
ห้องสมุดไป่ตู้
4 6 8
PB1 V+
11 BOOTCAP OUT2 10
LMD18200
P15
1 2
Header 2H
第 32 卷第 4 期 2012 年 8 月
辽宁工业大学学报(自然科学版)
Journal of Liaoning University of Technology(Natural Science Edition)
Vol.32, No.4 Aug. 2012
智能灭火机器人的控制系统设计与实现
李 茜,杜 刚,魏利卓,袁 银
后,与5个光电传感器相连接的I/O口均初始化为输
与汇编语言相比,虽然高级语言具有生成代码
入状态,并将其设置为高电平。当障碍物进入到光 长、执行速度慢等缺点,但是为了提高程序的可读
电传感器的探测范围时,传感器指示灯发光,并返 性和可移植性,使用C语言开发智能灭火机器人的
回相对应的I/O口低电平。单片机通过执行循环语 控制系统。
用来判断房间内是否存在火源、火源的强弱,根据 示。
火源的强弱可以判定机器人与火源的距离,使用安 装在机器人身上的7段数码管显示模块将火源最强
4 结束语
的通道号显示出来,并且使机器人转到正对火源方
智能灭火机器人系统控制核心采用高性能、低
向,并沿着该方向接近火源后停止,然后启动风扇 功耗的AVR的EXP ATmega128,对光电传感器的电
1 智能灭火机器人的结构
本文设计的智能灭火机器人由移动系统、动力 系统、控制系统、作业系统和显示系统5部分组成。 移动系统主要有以下特点:具有一定的承载能力、
收稿日期:2012-06-23 基金项目:中国地质大学(北京)大学生创新创业训练计划项目 作者简介:李茜(1990-),女,辽宁锦州人,本科生。
C22 103
图2 LMD18200驱动接口电路
智能灭火机器人可以通过火焰传感器来判断 前方是否存在火源。火焰传感器主要由5个红外接 收管和若干电阻、电容组成,电路原理图如图3所 示。火焰传感器可以检测火焰或者波长在760~1 100 nm范围内的光源,水平探测范围约为60º. 火焰传感 器直接与单片机的I/O口相连,当机器人前方有火源 时,红外接收管阻值变小,I/O口返回的电压变低, 将测量结果显示到数码管上,数值在1~1024.