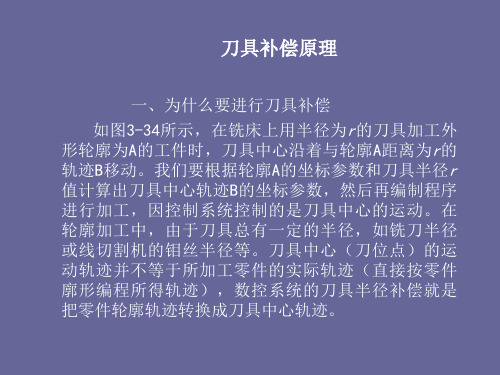
3_TPS混联机床刀具长度补偿算法
数控加工刀具的补偿

数控加工刀具的补偿发布时间:2023-01-17T01:39:52.059Z 来源:《中国科技信息》2022年18期作者:高杨[导读] 使用数控车床进行编程与加工工件时,必须真正地理解和掌握好刀具补偿功能的原理及分类高杨32090219851003****摘要:使用数控车床进行编程与加工工件时,必须真正地理解和掌握好刀具补偿功能的原理及分类。
才能合理地将刀具补偿功能应用于数控车床的编程与加工中。
加工出符合零件技术要求的工件。
关键词:数控机床;刀具补偿;一、刀具补偿概述目前大多数数控机床都具备刀具自动补偿的功能。
编程人员只需将需要补偿的数值输入NC系统中,数控系统便以自动进行刀具补偿?。
编程人员可以将更多的精力分配给如何加工出符合设计轮廓的程序,刀尖圆弧半径、刀具的磨损情况及刀具的坐标变化都无需编程人员的考虑。
大大提高了编程效率与加工精度。
数控加工中主要有四种补偿方式:刀具长度补偿、刀具半径补偿、夹具偏置补偿、夹角补偿(主要用于加工中心和数控铣床)。
二、刀具长度补偿。
使用刀具长度补偿是通过执行含有G43(刀具位置正补偿)、G44(刀具位置负补偿)和H指令来实现的,同时我们给出一个Z坐标值,这样刀具在补偿之后移动到离工件表面距离为Z的地方。
另外一个指令G49(取消刀具位置补偿)是取消G43(G44)指令的,其实我们不必使用这个指令,因为每把刀具都有自己的长度补偿,当换刀时,利用G43(G44)H指令赋予了自己的刀长补偿而自动取消了前一把刀具的长度补偿。
刀具长度的概念刀具长度是一个很重要的概念。
我们在对一个零件编程的时候,首先要指定零件的编程中心,然后才能建立工件编程坐标系,而此坐标系只是一个工件坐标系,零点一般在工件上。
长度补偿只是和Z坐标有关,它不象X、Y平面内的编程零点,因为刀具是由主轴锥孔定位而不改变,对于Z坐标的零点就不一样了。
每一把刀的长度都是不同的,例如,我们要钻一个深为50mm的孔,然后攻丝深为45mm,分别用一把长为250mm的钻头和一把长为350mm的丝锥。
如何用好加工中心刀具长度补偿功能

如何用好加工中心刀具长度补偿功能第一篇:如何用好加工中心刀具长度补偿功能如何用加工中心刀具长度补偿功能刀具补偿功能,是数控机床的一项重要功能,在准备功能中用G43、G44、G49表示,但是若使用得不好恨容易造成撞车和废品事故。
下面以加工中心为例,介绍生产实践中常用的机种刀具长度补偿方法。
1、刀具长度补偿功能的执行过程典型的指令格式为G43 Z_H_;或G44 Z_H_。
其中G43指令加补偿值,也叫正向补偿,即把编程的Z值加上H代码的偏值寄存器中预设的数值后作为CNC实际执行的Z坐标移动值。
相应的G44指令减去预设的补偿值,也叫负向补偿。
当指令G43时,实际执行的Z坐标值Z’=Z_+(H_);当指令G44时,实际执行的Z坐标值为Z’=Z_-(H_);这个运算不受G90绝对值指令或G91增量值指令状态的影响。
偏值寄存器中可预设正值或负值,因此有如下等同情况。
1)指令G43、H设正值等同于指令G44、H设负值的效果; 2)指令G43、H设负值等同于指令G44、H设正值的效果因此一般情况下,为避免指令输入或使用错误时失误,可根据操作者习惯采用两种方式: 1)只用指令G43,H设正值或负值; 2)H 只设正值,用指令G43或G44。
以下介绍使用较多的第一中情况:指令格式中Z值可以为0,但H0或H00将取消刀具长度补偿,与G49效果等同,因为0号偏值寄存器被NC永远置0.一般情况下,为避免失误,通过设定参数使用刀具长度补偿只对Z轴有效。
例如当前指令为G43X_H_;时,X轴的移动并没有被补偿。
被补偿的偏置值由H后面的代码指定。
例如H1设20.、H2-30.,当指令“G43 Z100.H1;”时,Z轴将移动至120处:而当指令“G43 Z100.H2;”时,Z轴将移动至70.处。
G43(G44)与G00、G01出现在一个程序段时,NC将首先执行G43(G44)。
可以在固定循环的程序段中指令G43(G44),这时只能指令一个H代码,刀具长度补偿同时对Z值和R值有效。
数控机床刀具补偿原理
A
r1 N11 r2 P Q N12
G42
B r2 G41
N
M
r1
图3-43 刀补方向改变的切削实例
图3-44 刀补半径改变的实例
2. 改变刀具半径值 在零件切削过程中刀具半径值改变了,则新的补偿 值在下个程序段中产生影响。如图3-44所示,N10段补 偿用刀具半径r1 ,N11段变为r2 后,则开始建立新的刀 补,进入N12段后即按新刀补r2进行补偿。刀具半径的 改变可通过改变刀具号或通过操作面板等方法来实现。 3. 过切问题 (1)刀具半径补偿可使刀具中心轨迹在走刀平面 (如xy面)内偏移零件轮廓一个刀具半径值。在刀补 建立后的刀补进行中,如果存在有二段以上没有移动 指令或存在非指定平面轴的移动指令段,则可能产生 过切。 如图3-45所示,设刀具开始位置距工件 表面上方50mm, 切削深度为8mm。z轴垂直于走刀平 面(xy面),则按下述方法编程,会产生过切。
y A(X,Y) ΔY α K A′(X′,Y′) r K ΔX x
y
B′(Xb′,Yb′)
O
α O′
ΔY B(Xb,Yb) K ΔX R r A′(Xa′,Ya′) A(Xa,Ya) x
β O
图3-37 直线刀具补偿
图3-38 圆弧刀具半径补偿
2. 圆弧刀具半径补偿计算 对于圆弧而言,刀具补偿后的刀具中心轨迹是一个 与圆弧同心的一段圆弧。只需计算刀补后圆弧的起点 坐标和终点坐标值。如图3-38所示,被加工圆弧的圆 心坐标在坐标原点O,圆弧半径为R,圆弧起点A,终 点B,刀具半径为r。 假定上一个程序段加工结束后刀具中心为A′,其坐 标已知。那么圆弧刀具半径补偿计算的目的,就是计 算出刀具中心轨迹的终点坐标B′ X b ,Y。设BB′在两个坐 b X 为则 , Y 标上的投影 X b X b X Yb Yb Y (3-49)
数控车床刀具补偿ppt课件
⑸刀具半径补偿过程
刀具半径补偿由补偿开始、补偿进行、补偿撤销三 个步骤组成,要注意补偿开始点和撤消点的位置, 本示例中均为点(X0,Y0),通常补偿开始点与 第一个补偿点(或撤消点与最后一个补偿点)间的 距离大于刀具半径,以保证补偿的正常进行,并且 不会损伤到加工的轮廓。
刀具半径补偿的过程
25
N4 G00 X40.0 Z5.0
N5 G00 X0.0
N6 G42 G01 Z0 F60 (加刀补)
O N7 G03 X24.0 Z-24 R15
N8 G02 X26.0 Z-31.0 R5
N9 G40 G00 X30 (取消刀补)
N10 G00 X45 Z5
N11 M30
29
30
0001; N10 M03 S600; N20 T0101; N30 G42 G00 X26.0 Z2.0; N40 G01 Z0 F150; N50 X56.0; N60 X60.0 W-2 .0; N70 Z-12.0; N80 G02 X80.0 Z-22.0 I10.0 K0; N90 G01 X84.0 W-2.0; N100 Z-35.0; N110 X115 .0; N120 G40 G00 X150.0 Z200.0; N130 M05; N140 M30;
可以使加工程序不随刀尖位置的不同 而改变.
3
图3-2 刀位偏差和刀具偏置补偿 a) 无刀位偏差 b) 有刀位偏差
4
❖为什么需要刀具补偿?
➢刀具使用一段时间后会磨损,会使加工
尺寸产生误差.
解决:
•将磨损量测量获得后进行补偿.
可以不修改加工程序.
5
为什么需要刀具补偿?
➢数控程序一般是针对刀位点,
刀具的长度补偿功能
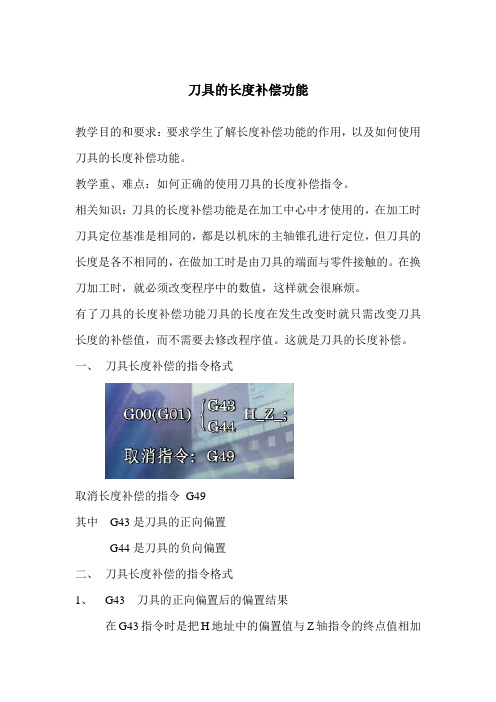
刀具的长度补偿功能教学目的和要求:要求学生了解长度补偿功能的作用,以及如何使用刀具的长度补偿功能。
教学重、难点:如何正确的使用刀具的长度补偿指令。
相关知识:刀具的长度补偿功能是在加工中心中才使用的,在加工时刀具定位基准是相同的,都是以机床的主轴锥孔进行定位,但刀具的长度是各不相同的,在做加工时是由刀具的端面与零件接触的。
在换刀加工时,就必须改变程序中的数值,这样就会很麻烦。
有了刀具的长度补偿功能刀具的长度在发生改变时就只需改变刀具长度的补偿值,而不需要去修改程序值。
这就是刀具的长度补偿。
一、刀具长度补偿的指令格式取消长度补偿的指令G49其中G43是刀具的正向偏置G44是刀具的负向偏置二、刀具长度补偿的指令格式1、G43 刀具的正向偏置后的偏置结果在G43指令时是把H地址中的偏置值与Z轴指令的终点值相加做为Z轴的最终指令值。
例:G00 G43 H01 Z50 其中设H01的设定值为-100(Z轴的指令值)+(H01的设定值)=50+(-100)=-502、G44 刀具负向偏置后的偏置结果在G44指令时是把Z轴指定的终点值减去H地址中的偏置值做为Z轴的最终指令结果。
例:G00 G44 H01 Z50 其中设H01的设定值为100(Z轴指定的值)—(H01的设定值)=50—100=-50注意:可以发现在G43中负的和在G44中用正值偏置结果是相同的。
三、刀具长度补偿的方法刀具长度补偿的补偿方法通常有两种。
1、刀具的补偿值即为刀具的长度值这种方法必须在有对刀仪的前提下才能使用,这种方法只需要对刀仪测出长度后,输入相对的H地址栏中即可。
但工件坐标系中Z 轴的偏置值应为在机床坐标系中的实际值。
如图那么A刀G00 G43 H01 Z0的偏置结果就是如B图所示。
如方法不正确或没有偏置,即G00 Z0的位置则如图中C刀所示与工件发生了碰撞。
2、刀具的补偿值为刀尖到Z向零点的距离没有对刀仪的情况下常用这种方法。
即把工件坐标系中Z轴的偏置值设为0,用对刀的方法测出刀具的刀尖到Z向零点的距离,并输入H地址中如图。
刀具位置补偿和半径补偿综述
第四章 第三节 计算机数控(CNC)系统 刀具位置补偿和半径补偿
刀具补偿是数控中的重要组成部分,当采用不同 尺寸的刀具加工同一轮廓尺度的零件,或同一名义尺 寸的刀具因换刀重调或磨损而引起尺寸变化时,为了 编程方便和不改变已制备好的穿孔带(或程序),数 控装置常备有刀具补偿机能。
一、刀具的位置补偿 当采用不同尺寸的刀具加工同一轮廓尺寸的零 件,或同一名义尺寸的刀具因换刀重调或磨损而引 起尺寸变化时,为了编程方便和不改变已制备好的 穿孔带,数控装置常备有刀具位置补偿机能,将变 化的尺寸通过拨码开关或键盘进行手动输入,便能 自动进行补偿。
由前所述,可见要实现刀具半径补偿,数控系 统除了有直线、圆弧插补功能外,还须具有处理刀 具半径矢量的能力,这种处理能力表现在补偿矢量 偏移的计算和补偿矢量的旋转两个方面。
上述对刀具补偿矢量的处理,通称为“刀具偏移 计算”。实现的方法有r² 法、矢量法、比例法等。
这些方法的刀具半径补偿只能计算出直线或圆 弧终点的刀具中心坐标值,两个程序段之间轮廓的 转接(又称拐角或过渡)是以圆弧方式进行的,没 有考虑连接的各种实际情况,故称其为一般刀具半 径补偿,或称B机能刀具补偿(简称B刀补)。
r S a)缩短型直线→直线
r S b)缩短型直线→圆弧
r S
r S S
r S
r S S
c)伸长型直线→直线
d)伸长型直线→圆弧
S r S r S e)插入型直线→直线 S r S f)插入型直线→圆弧 S r S
下面以一个实例来说明刀具半径补偿的工作过 程,数控系统完成从O点到E点的编程轨迹的 加工步骤如下:
三、刀具的长度补偿 刀具的长度补偿指令一般用于刀具轴向(Z 方向)的补偿。 它可使刀具在Z方向上的实际位移大于或小 于程给定值。即:
数控机床刀补参数设置
数控机床刀补参数设置随着工业自动化的不断发展,数控机床在现代制造业中扮演着越来越重要的角色。
数控机床的刀具补偿参数设置是其正常运行的关键之一,合理设置刀具补偿参数能够保证加工精度和效率。
本文将介绍数控机床刀具补偿参数的设置方法及其影响因素。
1. 刀具补偿概述刀具补偿是数控机床加工中常用的一种技术手段,通过在程序中设置刀具补偿值,来补偿刀具的实际尺寸偏差,以保证加工零件的尺寸精度。
刀具补偿通常包括半径补偿、长度补偿和刀尖半径补偿等。
2. 刀具补偿参数设置方法2.1 刀具半径补偿设置刀具半径补偿是在数控机床中常见的一种补偿方式。
具体设置方法如下:- 定义刀具半径补偿的序号;- 设置补偿数值,根据实际情况调整;- 选择切削方向,确定补偿方向。
2.2 刀具长度补偿设置刀具长度补偿主要用于控制刀具与工件接触的位置,避免刀具碰撞。
设置方法如下:- 定义刀具长度补偿的序号;- 设置补偿数值,根据实际情况调整;- 确定刀具路径,避免与工件干涉。
2.3 刀尖半径补偿设置刀尖半径补偿常用于弥补刀具的圆弧轮廓误差。
设置方法如下:- 定义刀尖半径补偿的序号;- 设置补偿数值,根据实际情况调整;- 确定刀具轮廓路径,保证加工精度。
3. 刀具补偿参数影响因素刀具补偿参数的设置需考虑以下因素:•刀具材质和尺寸;•工件材料和形状;•加工精度要求;•切削速度和进给速度。
综上所述,数控机床刀具补偿参数设置是保证加工精度和效率的重要步骤,正确设置补偿参数可以提高机床加工的稳定性和质量。
在实际操作中,操作人员需要根据具体情况灵活调整参数,不断优化加工过程,以获得更好的加工效果。
希望本文对数控机床刀具补偿参数的设置有所帮助,并能引发更多关于数控机床加工技术的讨论与思考。
3-TPS混联机床数控系统功能开发

3-TPS混联机床数控系统功能开发
数控系统的功能开发对混联机床的进一步发展是有利的,过于繁琐复杂的操作面板及冗杂的程序结构不利于非专业编程人员对混联机床的功能利用,基于Clipper的3-TPS混联机床数控系统的搭建为其功能的继续拓展开发提供了可能。
本文针对东北大学自主研制的3-TPS混联机床开发了与传统机床类似的数控功能,在基于PMAC硬件平台的基础上,主要对以下几个方面进行了深入的研究:(1)以3-TPS混联机床为研究对象,推导了 3-TPS混联机床逆运动学位置反解及由笛卡尔空间到驱动杆关节空间的速度雅阁比矩阵,(2)针对3-TPS混联机床分析比
较了各个插补算法的优劣,利用数据采样插补法研究了直线插补与圆弧插补算法,并编写了混联机床的直线与圆弧插补程序;(3)开发了执行G代码指令功能的含
有运动学位置反解的子程序;(4)基于Turbo PMAC硬件平台,开发了与传统数控系统相同的数控程序自动运行及混联机床手动操作等功能,实现了进给倍率修调、搜索回零、正负软硬件限位、五轴联动点动操作,同时,可实时监控坐标位置及电机位置。
最后,利用Visual Basic 6.0和PMAC32位通讯驱动PcommServer开发了混联机床的人机界面;(5)利用建立的标准G代码进行了加工实验,验证了 3-TPS运动学逆解子程序及G代码解释程序编写的正确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
908Leabharlann 东北大学学报 (自然科学版) 第 27 卷
时具有立式和卧式两种加工状态 , 四坐标加工时 只具有卧式加工状态) ,在动平台回转轴 A 3 A 6 里 有一对蜗轮蜗杆 , 即动平台回转轴上附加了一个 转动θ4 ,当 θ4 = - θ1 时 , 可以保证刀头始终处于 垂直状态加工 , 或蜗轮蜗杆顺时针旋转使 θ4 = 180°,此时为卧式加工·而五坐标加工时 , 0 ≤θ4 ≤ 180°·安装时要尽量保证刀尖点的位置始终处于 动平台上动系的 y′轴的延长线上·当三杆根据加 工要求分别伸长或缩短时 , 由于平行机构 、θ4 、θ1 的共同作用 ,使动平台具有沿 x , y , z 轴的 3 个移 动自由度和绕 y′轴的转动自由度·若再在旋转刀 具的下方安装一个数控回转工作台 (回转角度为 θ5) ,此机床即可以实现五面五坐标加工·
坐标加工所不同的是它在三坐标加工的基础上又 附加了两个转动坐标 ,即 B 轴和 C 轴的转动 ,在 此情况下 ,其刀具长度补偿的计算远不是三坐标 加工时刀具长度补偿时的简单计算 ,而是涉及了 在加工过程中 ,刀具根据加工表面的变化情况而 与加工表面的法线间具有一定的角度后的刀具长 度补偿·
32TPS混联机床在实现五坐标加工时 ,当刀
L i = b′ixsθ1 s45°- b′izcθ1 s45°+ Y C ±Δcosαcos C1 + l dcosα - B 1 Y ·
(9)
- b′ixsθ1 c45°+ b′izcθ1 c45°+ ZC ±Δsinα + l dsinα - B iZ
3 结 论
32TPS 混联机床是在成熟并联机构基础上进 行的变异设计 ,该机床具有多坐标联动加工功能· 本文根据 32TPS 混联机床的特殊结构 ,对该机床 在实现三坐标立式 、卧式加工 、四坐标加工及五轴 联动加工时刀具长度补偿算法进行了研究 ,给出 了各种加工情况下的刀具补偿算法 ,建立了刀心 点与刀具长度补偿值之间 、三根杆的伸长量与刀 具补偿值之间的关系·其算法简单 、方程为显式 , 满足控制系统的速度要求·
XD = XC ,
YD = YC ,
(3)
ZD = ZC ±Δ ·
由式 (2) 、式 (3) ,可以得到杆的伸长量与刀补值之 间的关系 :
Li =
b′ixcθ1 + b′izcθ1 + X C - B iX b′ixsθ1 s45°- b′izcθ1 s45°+ Y C + l dcosα - B 1 Y · - b′ixsθ1 c45°+ b′izcθ1 c45°+ ZC + ldsinα ±Δ - BiZ
心点与刀具长度补偿值之间 、三根杆的伸长量与刀具补偿值之间的关系· 关 键 词 : 混联机床 ;立卧转换 ;五轴联动 ;长度补偿 中图分类号 : TP 24212 文献标识码 : A
并联机床是具有革命性的机床设计的突破 , 它代表了 21 世纪机床发展的方向·自 1994 年美 国 G &L 公司在芝加哥展览会上推出 VAR IAX 六条腿并联机床以来 ,这类新概念机床在国际上 发展得很快·现在并联机床不仅用于切削加工 ,还 可当作试验平台 、工业机器人 、机械装配等来使 用[1 ,2 ]·随着并联机床的发展 ,在并联机构基础上 进行的变异设计成了并联机床发展的又一个热 点[3 ,4 ] ,目前基于并联机构的混联机床是其中的 一个主要变异设计·
2 3 2TPS 混联机床刀具长度补偿原 理及算法
为了简化数控编程 ,方便加工操作 ,在数控系 统中一般都具有刀具补偿功能 ,简称刀补 ,即用垂 直于刀具轨迹的位移来修正刀具实际半径或长度
与其程序规定的值之差·因此 ,数控机床应具备刀 具补偿功能 ,它既可以降低对刀具制造 、安装的要 求 ,又可以简化程序编制·刀具补偿一般包括刀具 半径补偿和刀具长度补偿·刀具半径补偿可以使 刀具在走刀平面内相对编程偏移一个刀具半径修
第27卷第8期 2006 年 8 月
东北大学学报 (自然科学版) Journal of Nort heastern University (Nat ural Science)
文章编号 : 100523026 (2006) 0820907204
Vol127 ,No. 8 Aug. 2 0 0 6
32TPS 混联机床刀具长度补偿算法
(4) 式中 , ( X C , Y C , ZC) 为刀心点在机床坐标下的位 置 ,也即是刀心轨迹的位置·
通过式 (4) 也可以解得 θi ( i = 1 , 2 , 3) 与刀补 值之间的关系·
第 8 期 石 宏等 : 32TPS 混联机床刀具长度补偿算法
909
图 3 D 点处于不同位置时的刀具长度补偿 Fig. 3 The length compensation of cutting2tool when point D lie s in different po sitions
坐标系 D2X′Y′Z′的姿态与机床坐标系 O2X Y Z 的
姿态相同 ,并将坐标系 D2X′Y′Z′看成是由坐标系
O2X Y Z 沿三个坐标轴平移得到的·
由图 5 有
X C = XD - ΔcosαsinθC ,
Y C = Y D + ΔcosαcosθC ,
(7)
ZC = ZD + Δsinα·
(a) —D 点与刀心点 C 重合 ; (b) —D 点在 C 点之上 ; (c) —D 点在 C 点之下·
图 4 刀具结构尺寸 Fig. 4 Cutting2tool dimensions
2. 2 32TPS 混联机床五坐标加工时刀具长度补 偿原理及算法 32TPS 混联机床在实现五坐标加工时 ,与三
2 所示 ,图中 L 0 , H , Δ 分别为刀具的实际长度 、
程序给定的刀具长度和补偿量·
L 0 = H ±Δ ·
(1)
图 2 三坐标加工时刀具长度补偿 Fig. 2 The length compensation of cutting2tool
during 32axis proce ssing
正值 ;刀具长度补偿使刀具垂直于走刀平面偏移 一个刀具长度修正值·
在数控编程中 ,刀具长度一般是无需考虑的· 程序中假定机床主轴相对工件运动 ,在加工之前 , 采用刀具测量仪测量刀具基准点 (刀尖或刀心) 到
刀具长度基准点的长度 ,并将刀具长度数据 (刀库 或刀具补偿参数) 输入到数控系统的刀具数据寄 存器中·在数控系统加工程序中使用该刀具时 ,数 控系统自动计算 ,使刀具基准点沿程序要求的轨 迹运动· 2. 1 32TPS 混联机床三坐标加工时刀具长度补
双十字轴的回转轴 A 1 A 4 平行 , 从而使动平台具 有 θ1 ,θ2 ,θ3 回转角度[5~7 ]·
图 1 32TPS 混联机床结构简图 Fig. 1 Schematic of 32TPS hybrid machine tool
当进行三坐标或四坐标加工时 , 为了保证加 工中刀头始终处于垂直或卧式状态 (三坐标加工
(a) —程序给定位移量大于刀具实际长度 ; (b) —程序给定位移量小于刀具实际长度·
按照设计要求 ,安装时要尽量保证刀尖点 (刀 心点) 的位置始终处于动平台上动系的 y′轴的延 长线上 ,如图 1 所示·但由于刀具的长度不同 , y′轴 的延长线与刀具轴线的关系就有三种可能 :刚好与 刀心点相交如图 3a ,与刀具轴线相交如图 3b ,与刀 具轴线的延长线相交如图 3c ,设交点为 D·对于第 一种情况 , D 为刀心点 ,即 D = C , C 为刀心点·设 FD = l0 , F 为刀具安装时的上端点 ,如图 4 所示 , D 点坐标与 3 根伸缩杆的杆长之间的关系为
XD = X C + ΔcosαsinθC , YD = Y C - ΔcosαcosθC , ZD = ZD - Δsinα·
由式 (2) ,式 (7) ,可以得到五坐标加工时杆的伸长 (8) 量与刀补之间的关系 :
b′ixcθ1 + b′izsθ1 + X C ×Δcosαsin C1 - B iX
偿原理及算法
根据前述机构描述可知 ,32TPS 混联机床可 以实现三坐标 、四坐标和五坐标的加工 ,并可以实 现立卧转换加工·当该机床在实现三坐标立式或 卧式加工及四坐标卧式加工时 ,其刀具长度补偿 原理相同·
32TPS 混联机床在实现三坐标端铣加工时 , 通常不仅需要进行刀具的半径补偿 ,而且还需要 控制刀具的轴向位置 ,因此当刀具实际长度尺寸 与编程所设定的长度尺寸不一致时 ,就应相应地 增加 (或减少) 一个位移量 ,这就是长度补偿·如图
图 5 五坐标加工时的刀具长度补偿 Fig. 5 The length compensation of cutting2tool during 52axis proce ssing
(a) —五坐标加工时刀具摆动角度 ; (b) —五坐标加工时刀具长度补偿算法图解·
910
东北大学学报 (自然科学版) 第 27 卷
·
(5)
θB
= arcsin
ax
acos (λ)
,
(6)
θC = arcsin
ax
a sin (λ)
·
式中 , a 为刀轴单位矢量 , a x 为 a 在 X′轴上的投
影·
图 5b 为五坐标加工时的刀具长度补偿算法
图解 ,图中 p 点 、D 点的意义同上 , c′, c″分别为
两把不同刀具的刀心点 , T 为刀具的方向矢量 ;
Li =
b′ixcθ1 + b′izcθ1 + XD - B iX b′ixsθ1 s45°- b′izcθ1 s45°+ Y D + l dcosα - B 1 Y · - b′ixsθ1 c45°+ b′izcθ1 c45°+ ZD + l dsinα - B iZ