混合型三维减振平台主体机构的运动及动力分析
机械设计中的结构减振技术论文素材

机械设计中的结构减振技术论文素材机械设计中的结构减振技术一、引言机械工程领域的结构减振技术是一门关键的技术,可以有效减少机械系统中的振动干扰。
在现代工业生产环境中,减振技术的应用已经成为一项重要的任务。
本文将探讨机械设计中常见的结构减振技术,并分析其在实际应用中的优势和局限性。
二、动力学分析在机械系统设计中,动力学分析是结构减振技术的基础。
首先,需要明确机械系统的振动模态和频率响应。
通过对系统的自由度进行建模和计算,可以得到系统的振动模态,并确定主要的振动频率。
三、质量平衡设计质量平衡设计是一种常见的结构减振技术。
通过在机械系统中增加平衡质量,可以有效抵消系统在运行过程中的振动。
常见的质量平衡设计方法包括静态平衡和动态平衡。
静态平衡通过在机械系统特定位置添加平衡质量,使得系统在静态状态下达到平衡。
动态平衡则是在系统运行时根据振动响应进行调整,以消除振动。
四、结构刚度优化结构刚度优化是另一种常见的结构减振技术。
通过在机械系统中优化结构的刚度分布,可以有效改善系统的振动性能。
结构刚度优化可以通过材料选择、截面设计和连接方式改进来实现。
例如,在某些情况下,可以通过增加杆件的截面面积来提高机械系统的整体刚度,从而减小系统的振动。
五、减振器应用减振器是机械设计中常用的结构减振技术之一。
减振器的原理是利用一定的机械装置或技术手段,将振动能量转化为其他形式的能量,实现振动的减小或消除。
常见的减振器包括阻尼器、弹性元件和液压减振器等。
减振器的应用可以有效降低机械系统的振动干扰,提高系统的稳定性和精度。
六、实例分析为了更好地了解机械设计中结构减振技术的应用,我们以某机械系统为例进行实例分析。
分析该系统的振动模态、频率响应以及结构刚度分布,确定主要的振动问题,并针对性地采取上述结构减振技术进行优化。
通过实例分析,可以验证结构减振技术在实际应用中的可行性和效果。
七、结论结构减振技术在机械设计中具有重要的应用意义。
通过动力学分析、质量平衡设计、结构刚度优化和减振器应用等技术手段,可以有效减小机械系统的振动干扰,提高系统的工作稳定性和精度。
三维隔震结构摇摆动力模型及振动台试验验证
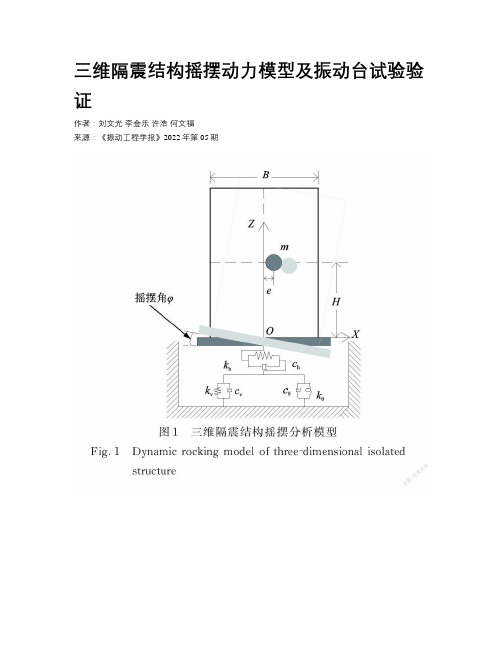
三维隔震结构摇摆动力模型及振动台试验验证作者:刘文光李金乐许浩何文福来源:《振动工程学报》2022年第05期摘要:建立了三维隔震结构的平动⁃摇摆耦联动力分析模型,给出了结构动力方程,得到了三维隔震层的摇摆响应理论表达式,并进行了结构水平、竖向、摇摆频率比以及隔震层阻尼比等参数的影响分析,发现摇摆响应随水平、竖向、摇摆频率比的增大存在峰值区间,但总体上均呈减小趋势,且摇摆运动的激励频率由输入地震主频和水平运动频率共同控制。
完成了三维隔震模型的振动台试验,对比验证了摇摆响应随竖向频率比的变化规律。
最后进行了不同高宽比算例结构的地震响应分析,发现三维隔震结构的摇摆频率易接近摇摆激励主频造成共振,其摇摆响应随高宽比变化存在峰值区间,总体呈增大趋势。
关键词:三维隔震;摇摆响应;频率比;阻尼比;高宽比中图分类号: TU352.1;TU311.3 文献标志码: A 文章编号:1004-4523(2022)05-1200-11DOI:10.16385/j .cnki .issn .1004-4523.2022.05.018引言基础隔震技术具有优异的减震效果,可显著提升结构抗震能力,自1994年洛杉矶Northridge 地震以来已在世界范围内得到了广泛应用[1]。
传统的抗震设计中重视水平地震作用,认为竖向地震作用不会对结构造成严重影响[2]。
然而地震是一项复杂的三维运动,多次强震记录也显示,地震动竖向加速度峰值超过水平加速度峰值,竖向地震作用对结构的影响不容忽视[3⁃4],因此对结构进行三维隔震设计是非常必要的。
国内外学者进行了大量三维隔震系统研发和结构分析理论研究。
Lee 等[5]设计了一种由弹簧和楔形摩擦块组成的竖向隔震装置,通过楔形摩擦块将竖向荷载转化为水平荷载,从而起到竖向减震的效果。
Chen 等[6]提出了一种利用组合液压油缸的变刚度隔震装置,并在一大跨结构中验证了其减震效果。
Walaa等[7]提出了以磁流变阻尼器为竖向元件的半主动三维隔震装置。
车辆座椅三维减振平台的运动学分析及参数优化

车辆座椅三维减振平台的运动学分析及参数优化
吴伟光;马履中
【期刊名称】《中国机械工程》
【年(卷),期】2011(022)012
【摘要】针对车辆座椅的三维减振问题,提出一种新型三平移并联机构减振平台,对减振平台进行了运动学分析,利用MATLAB搜索机构的工作空间及其工作空间的奇异位形和操作灵活度,分析了机构结构参数与工作空间以及操作灵活度之间的关系,对该并联减振平台的结构参数进行了优化,且在MATLAB/Simulink中建
立了该减振平台的仿真模型。
仿真结果表明:在随机激励下减振平台具有较小的振动传递特性,适合作为车辆座椅三维减振平台。
【总页数】5页(P1503-1507)
【作者】吴伟光;马履中
【作者单位】江苏大学,镇江,212013;江苏大学,镇江,212013
【正文语种】中文
【中图分类】TH112
【相关文献】
1.车辆座椅减振隔振性能及其人体响应的实验研究 [J], 王苡丞;邱毅
2.车辆并联机构座椅三维减振研究 [J], 吴伟光;马履中;杨启志;陈修祥
3.基于Stewart双三角型机构多维减振座椅的参数优化设计 [J], 丁雯江;朱思洪
4.采用3-RCC型并联机构的车辆座椅悬架多维减振 [J], 王杰;毕凤荣;XU Wang;
马腾;孙浩轩
5.2-SPS+SR多维减振工程车辆座椅悬架运动学分析 [J], 燕碧娟;张杰;梁慧君;刘泽坤
因版权原因,仅展示原文概要,查看原文内容请购买。
三维隔震研究与应用

三维隔震试验的研究现状
•试验小结: 试验小结: 试验小结
研究结果表明: 研究结果表明 : 该三维隔震支座具有合适的刚度和 阻尼,三向阻尼比可以达到15 30% 15阻尼 , 三向阻尼比可以达到 15-30%, 三维隔震支座 的静载刚度和承载力与理论计算吻合得较好。 的静载刚度和承载力与理论计算吻合得较好 。 研究 还表明:动静刚度之比大约为1 还表明:动静刚度之比大约为1.3;随着加载频率增 三维隔震支座的屈服力、 加 , 三维隔震支座的屈服力 、 屈前刚度和阻尼均增 但对的屈后刚度影响不明显。 加,但对的屈后刚度影响不明显。
三维隔震试验的研究现状
•竖向性能试验 竖向性能试验 三维隔震支座的竖向性能试验研究采 静载和动载试验两种方法 首先, 试验两种方法。 用 静载和动载 试验两种方法 。 首先 , 对隔震支座的竖向刚度试验采用五次 反复加载试验获得:以设计荷载P为基 反复加载试验获得:以设计荷载P 荷载在( 70% 130% 准 , 荷载在 ( 70% - 130% ) P 范围内变 反复加载5 测量荷载— 化,反复加载5次,测量荷载—位移曲 线 , 由此获得橡胶隔震支座的竖向刚 然后, 度 。 然后 , 对三维隔震支座进行动载 试 验 : 采 用 0.1Hz 、 0.2Hz 、 0.5Hz 、 Hz的加载频率 的加载频率, 1Hz 和2Hz的加载频率,位移幅值分别 mm、 mm、10mm 为5mm、7mm、10mm 进行三维隔震支座 竖向刚度和阻尼比试验 试验。 的竖向刚度和阻尼比试验。
二、数值分析研究
1988年 RW通过对 通过对LMR 1988 年 ,Wu T,Chang YW,Seidensticker RW 通过对 LMR 核反应堆 进行水平和竖向隔震理论分析研究 。 1991 对一座RC RC公路桥 年 ,Saadeghvaziri M , Foutch D A 对一座 RC 公路桥 在水平和竖向地震分量共同作用下的动力反应进行了 分析。 ,SYa2 分析。2000 年,SYa2bana 等对叠层厚橡胶支座的力学 性能作了进一步理论研究。 性能作了进一步理论研究。2000 年,Lu L-Y,Chang WN数值模拟研究了水平和竖向地面运动对摩擦滑移隔震 结构的影响。 结构的影响。
三维隔震系统振动台实验研究_孟庆利

第27卷第3期2007年6月地 震 工 程 与 工 程 振 动JOURNAL OF E ART HQUAKE E NGI N EER I N G AND E NGI N EER I N G V I B RATI O N Vol .27No .3Jun .2007收稿日期:2006-12-15; 修订日期:2007-02-28 基金项目:地震科学联合基金项目(B07012);中国地震局工程力学研究所预研究项目 作者简介:孟庆利(1974-),男,副研究员,博士,主要从事结构动力试验技术结构振动控制研究.文章编号:100121301(2007)0320116205三维隔震系统振动台实验研究孟庆利,林德全,张敏政(中国地震局工程力学研究所,黑龙江哈尔滨150080)摘要:针对目前隔震体系尚不能减小竖向地震反应的缺陷,提出并研制了采用碟形弹簧的竖向半主动隔震装置。
竖向半主动隔震装置是由碟形弹簧和外套油缸组成的,且由电磁阀控制油缸内油体与外接蓄油箱内油体间的油路,可实现竖向半主动隔震控制,提出了竖向隔震控制的半主动策略,结合水平隔震支座可实现三维隔震。
通过振动台地震模拟实验,验证了三维隔震体系的效能,该研究对高烈度地区隔震技术的改善具有应用参考价值。
关键词:基底隔震;半主动竖向隔震;三维隔震;振动台实验中图分类号:P315.972 文献标志码:AStudy on three 2d i m en si ona l isol a ted syste m i n shak i n g t able testME NG Q ingli,L I N Dequan,ZHANG M inzheng(I nstitute of Engineering Mechanics,China Earthquake Adm inistrati on,Harbin 150080,China )Abstract:I n this paper,in vie w of the li m itati on that the p reset base is olati on syste m can not decrease the vertical seis m ic res ponse,a kind of vertical se m i 2active is olated device with disk s p ring was devel oped .The vertical se m i 2active is olated device is made up of oil cylinder within disk s p ring and electr omagnetic valve that contr ols the oil r oute bet w een the oil cylinder and oil box,then achieves the vertical se m i 2active is olati on,and dra ws up a se m i 2ac 2tive contr ol strategy suited t o vertical se m i 2active is olated contr ol .Combining vertical se m i 2active is olated device with horiz ontal is olated bearing can achieve three 2di m ensi onal is olati on .The contr ol efficiency of three 2di m ensi onal is olati on syste m was validated thr ough the shaking table tests,this research is a hel p t o ref or m the is olati on tech 2nique in a high seis m ic intensity z one .Key words:base 2is olati on;se m i 2active vertical is olati on;three 2di m ensi onal is olati on;shaking table test引言 近20年来,现代隔震技术在土木工程中得到了较大规模的应用,隔震结构以其优良的减振效果、安全性、耐久性、经济性、适用性,得到地震工程界的认可。
惯性测量组合减振系统动力学分析及实验研究_郑玲

图 2 振动系统动力学模型 Fig.2 The model of vibration system
无阻尼情况下, 系统的动力学方程为:
(1)
式中: [ M ] , [ K ] 分别为系统的质量矩阵和刚度矩阵:
·24·
第 12 卷 第 3 期
郑玲等: 惯性测量组合减振系统动力学分析及实验研究
·23·
the energy decoupling rate of each order modal were all above 80% ; through the frequency response simulation analysis,the magnification in X, Y, Z of IMU vibration system was 3.072, 3.12, and 3.17, respectively; through the shock response simulation analysis, the maximum amplitude of IMU vibration system was 70.1g. Conclusion The experiment verifies that the finite element model is correct and the design of vibration isolation is effective. KEY WORDS: Inertial Measuring Unit; finite element model; dynamic characteristics; shock response
(3) 在理想状态下, IMU 的质心和隔振器的刚度中心 完全重合, IMU 在 6 个自由度上的振动完全解耦。对 于初始设计的结构, 系统的质心和隔振器的刚度中心 之间具有 3.2 mm 的偏差。因而, 需要通过调整陀螺仪 和加速度计的位置以及支架结构尺寸, 使 IMU 的质心 与隔振器的刚度中心基本重合, 进而使 IMU 在各自由 度上的振动都具有很高的解耦率。 在三维软件 Catia 中, 输入各个部件的材料参数, 对陀螺仪和加速度计的位置以及支架的结构尺寸进 行调整。文中使用的 4 个隔振器的规则相同, 并且每 个隔振器在空间三向具有相同的刚度, 所以 4 个隔振 器安装点坐标的平均值即是刚度中心坐标。调整后 IMU 质心的坐标为 (104.87, 97.173, -96.15) , 4 个隔振 器刚度中心的坐标为 (105, 97, -96) , 两坐标的差值为 (0.13, 0.173, 0.15) 。可以看出, 装配体的质心和隔振 器的刚度中心基本实现了完全重合。
消能减震结构的动力分析及优化设计的开题报告
消能减震结构的动力分析及优化设计的开题报告一、研究背景与意义近年来,随着城市化进程的不断加快,高层建筑和大型桥梁等重要工程的建设日益增多,对工程结构的稳定性和安全性提出了更高要求。
在地震等自然灾害的情况下,建筑和桥梁结构往往会受到严重的损坏。
为了应对这种情况,人们通常采用一些消能减震结构来减轻结构受到的冲击力,从而起到减震和减少结构受损的效果。
消能减震结构是指在建筑和桥梁结构中引入一些专门设计的消能器,通过吸收地震时产生的能量来减少结构的振动幅度,从而保证结构的安全运行。
在消能减震结构中,消能器的参数设置和结构的动力特性密切相关,需要采用有效的分析方法和优化设计来保证结构的稳定性和安全性。
二、研究内容在本文中,主要研究消能减震结构的动力分析及优化设计。
具体包括以下几个方面:1. 研究消能减震结构的工作原理和结构特点,深入分析消能器与结构的耦合作用,探讨消能器参数对结构动力响应的影响。
2. 建立消能减震结构的动力学模型,采用有限元软件进行数值求解,通过分析结构在地震作用下的动力响应,评估结构的安全性和稳定性,为优化参数设计提供依据。
3. 针对消能减震结构参数优化问题,提出一种基于优化算法的设计方法,通过对能量衰减、振动幅度和结构成本等多个指标进行优化,得到最优的消能器参数配置。
4. 对设计结果进行计算机模拟和实验验证,评估该方法的有效性和可行性。
三、研究计划本文的研究计划分为以下几个阶段:第一阶段:文献调研和理论研究主要从已有文献中了解消能减震结构的研究现状和进展情况,深入分析消能减震器与结构的耦合作用,以及消能器参数对结构动力响应的影响。
第二阶段:数值分析和仿真研究建立消能减震结构的动力学模型,使用有限元分析软件进行数值求解,分析结构在地震作用下的动力响应和结构的稳定性和安全性。
通过比较不同消能器参数配置下的结构响应,选取最优参数配置作为优化设计的初始值。
第三阶段:参数优化设计针对消能减震结构的参数优化问题,提出一种基于优化算法的设计方法,通过对能量衰减、振动幅度和结构成本等多个指标进行优化,得到最优的消能器参数配置。
2-PRC-PR(C)并联机构减振平台及其动力学特性

2-PRC-PR(C)并联机构减振平台及其动力学特性刘乃军;牛军川【摘要】为满足工程中机械设备对多维振动和冲击的隔离要求,设计一种新型2-PRC-PR(C)并联机构减振平台.该平台是在3-PRC并联机构的基础上,通过把一支链和上平台连接处的圆柱副改为一复合运动副,使该机构实现三自由度3-PRC并联机构与四自由度2-PRC-PR^C并联机构之间的切换,并在主动副处辅以弹簧阻尼,使该机构能够实现三维隔振与四维隔振.对该机构进行运动学和动力学分析,在此基础上将系统参量分类,并对参数较多类别采用正交试验法,分析各参数对系统固有频率的影响规律和贡献量.研究结果表明:多维减振平台中有关参量对系统固有频率的影响具有不同于单自由度减振装置的特性.%In order to meet the requirement to reduce the multi-dimensional vibration and shock from equipment and machines, a vibration isolation platform was proposed based on a 2-PRC-PR(C) parallel mechanism. This mechanism came from a 3-PRC parallel mechanism by replacing one of the cylindrical pairs at the moving platform with a combined pair. Thanked to the combined pair, the proposed platform could be switched between 3-PRC parallel mechanism with 3 degrees of freedom and 2-PRC-PR^C parallel mechanism with 4 degrees of freedom. 3 or 4 dimensional vibration isolation could be realized when spring damping were put on the active motion pairs. The kinematics and dynamics of the system were studied, and then the influence principle and contribution of the platform's parameters on its natural frequency were analyzed by orthogonal experiment method. The results show that therelevant parameters effects on the natural frequency of the system are different from the single degree of freedom vibration reduction device.【期刊名称】《中南大学学报(自然科学版)》【年(卷),期】2017(048)004【总页数】11页(P925-935)【关键词】并联机构;减振平台;固有频率;正交试验法【作者】刘乃军;牛军川【作者单位】山东大学机械工程学院,高效洁净机械制造教育部重点实验室,山东济南,250061;山东大学机械工程学院,高效洁净机械制造教育部重点实验室,山东济南,250061【正文语种】中文【中图分类】TH112精密仪器仪表、车载、船载、航空航天等机械设备在工作时都会受到大量的多维振动和冲击,成为影响设备性能和使用寿命的主要因素[1−3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
减振的 研究还不多见。 多维减振的 方法据国内外资料检索结 果, 仅有以下几种: 1 以 () 特殊橡胶或塑料为主体实现多维 减振, 缺点为易老化, 易失去弹性, 技术性能指标及寿命有 限, 性能不稳定。 2 用机械方法实现多自由 () 度减振。 如日
本藤田悦则, 坂本丰, 千柄一义在中国申 专利“ 请的 救护车用
其 l y州 + 一 T, B] 中A二 p 5 几 1 1一( x 一O) (nz . 考 2 R一 _ ) C
A. .‘ A I C
减振的衰减。 实践及仿真表明这种结构的减振性能优于原全
部采用通常转动副的减振效果。 机构的初始平衡位置应考虑 其运动范围, 既要满足减振运动量要求, 又要满足机构实际 运动工作空间的范围。
Tn u v s , jn, g 1 3C i ) sU irt Ze i gJns221, a i g n ei h a i u 0 h a y n a n
A s atT e O v r i r utn t r ue 3 O t st nl ll hn m R C i bs bt c h 3 F ao e co p f m d F li apr em cai 3 R a t a c r : - D i tn i l o s - b d a D r ao a a a e s - s i s
本文针对三维 ( 三平移) 减振平台进行分析研究, 采用 三平移并联机构作为减振平台的主体机构, 从三维减振平台 机构的具体结构、运动学及动力学等方面进行分析研究。
1 .三维减振平台的主体机构结构
三维减振平台的主体结构如图 l) a 所示。图l) a 表示 该并联机构由 3 R 组成。其中 C副在具体实现时用 - C R R 4 平行四边形机构来代替。 .R 因此该机构实际由3 R P - R R (R 机构来实现。三条支路都采用相同结构。以 4) 第一条
Z =qn m, =qm n・ p s (一 )pa s (+ ) m i r n zm c r
3 .三维减振平台的动力学分析
由于减振需要, 要求该平台机构在正向运动与反向 运动 中均不自 具有较高效率, 锁, 这就应对该机构进行动力分析,
= 竺1
式中 K为柔性关节的刚度值,八为柔性关节上作用力
w rsae okpc
前言
传统的有关单自由度的各种典型机械设备的减振理论 和方法都比较成熟, 诸如金属橡胶减振、 气弹簧减振、 复合
钢板减振等技术。 近年来还出现一些新的阻尼减振技术: 如 粉体阻尼技术, 可控电流变、 磁流变阻尼技术等。 , 但刘多维
层各自 实现独立方向减振的结构,使结构十分复杂。
混合型三维减振平台主体机构的运动及动力分析X
马履中 尹小琴 杨启志 吴伟光 沈惠平
( 江苏大学智能机器人研究所 江苏镇江 221) 103
摘 要 采用三 平移并联机构 3RC -R 作为三维减振平台主 体机构, 论文论述采用柔性关节与普通关节混合型的 主 体机构的 结构, 对原机构主动副 采用常 用转动副 加扭簧 装置外, 其余转动副 采用簧片结 构消除了 运动副间隙, 提高了 减振灵敏度。 论文对该机构进行了 位置正 反解分析动力学分析, 论了 解、 并讨 运动学工作空间, 动力学 工作空间及弹性关节最大允许变 形量, 动平台的实际工作空间 应为上述三者的交集, 论文对该机构的 整体力平 衡进行了 讨论, 提出了 解决整机力平衡的 方法。
动空间分析结果表述如下。 口位置逆解方程为:
2 + 口位置正解方程为:
一s 2, T2 2 ( y一 )/ 一 )
x一 s( 一 , f ) 1 ’( 一) , e m z 2 q r
Y =r+ . o ,l cs 1内 s,n a + oa,一 n cs ) 、 T 2 , 12 Z =一 sr a) 〔 士 g(‘ 4c /a p b - JZ
fr biVba o R d co Pa om o H r irt n ut n t r y d i e i l f
Ma hn Y Xag Yn qzi We un Se Lzog m oi ag h v i n Wu i ag hn g (tinRbt te c ooM c na nie g Ieg t IttS ol e ac Egei, nl e oo ni , f h il n r l su h n
远离该死区位置,一旦靠近该死区位置时机构效率将迅速下
' S 1 ' 4 ' s
。R 1 6 , 3 2
朋R a ‘么1 _
降 当 BAB = “ , 构 于 点 置 这 就 , L i 0时 机 处 死 位 。 也 是 22
机构的动力学工作空间 应避开的区域。 若不计运动副中摩擦 ( 若考虑摩擦情况下机构平衡时总合力反力应切于摩擦图)
. ‘塔.—B士 r3考一 ) , ,- ,s( + 心) _.1 gB ) r .L( i "l一 」
- 20 5-
xm =R )Ipa m n Q一, = + pi (一 n xm x
ym (一 2 pe二 十 pm=S 乃/., m n m 1 x Y
L3 " A +C 3
p s t . k e ac r pc, dnmc rsae t m x u df m tn t e sc t r e e T e m t w k aet ya iw kpc, ai m o ao o h l t ji a end h i n i os h e o h e m e r i f a i o r e n e
d cs d . pa il kpc ot m v g tr it m t l s h e v a. di nt ius t T e cc w r ae h oi p f m h u apr ot e aoe Iadi , s e o h r ta o s o f e n l o s u a f b l n t h a e t r l o e
m t d o e ne t hbiv r i r utn t r ip s t . e o o f c bl c f h yr i ao e co p f m r e e h f a r a o e d tn i l o s n d r b d a e
K y od: O v ri r utn tr, r em cai , nm t aa s, nmc l i ew rs3 F ao e co p f m p a l hn m k e ac l i d a iaa s, - D i tn i l o b d a al e s i i nys y n ys
关键词 三维减振平台, 并联机构, 运动学分析, 动力学分析, 工作空间
中5号aH fnem:2 } T6 类 tc 4 Ki i
文献标识码:
a d n mc a s ote O B s m cai n D a iA l i f 3 F i ehn m y n y s h - D a c s
m cai . sut e t hbd i m cai aot fx lj n ad e l t Whn e n m T e c r o h yr bs e n m p d ie t n gnr jn . e t h s h t u f r e i ac h s d e l b o s e a o s e i i h e raoaji ia e i ut p i s i . e i , raoajnir l e f s i l f o tnl t dvr t s u a n p n Ohr s t o tnl t p cd pn e i ti o s i , s e n r m t s g g t w e h ti o s a o rg n w r e i e r a o et r oe gp o tad r s s sit Te e e de k e ac, a i aa s i r r e v t a ojis i e e i i. i r ad c i m tsdnmc nl i s d o m h e f n n a e t y h n s n i t i y n c n v v r n s y s
能由C , 向B A 方向传递。这就要求每条支路不能工作在死
点或死区范围之内。
该力为主动力,此时该机构的死区为图 3 ) ( 所示,在 g
L i 范 之 , 构 作 应 开 区 。 实 这 BAB 围 内 机 工 时 避 该 间 事 上 2:
与机构的初始平衡位置有关,机构的初始平衡位置应尽可能
防 振架”幻 及坂本 〔 ,以 丰的日 专 “ 振担 床” 3 均采 本 利 防 架 1 ,
用多层 ( 二层或三层) 常规单自 由度弹性阻尼减振装置, 分
X 国家自 然基金项目 5356 0707 中国人民解放军军事科学院卫生装备研究所资助项目
支路为例, 该机构中 某条支路的结构如图l 所示, b 该支路 中除原来主动副 A 为通常形式的主动副加上扭簧 s外, : t 其余转动副B, R, R, 1 R, R, R副均采用板 1 2 3 a , 簧片 ( 图 l)联接来代替转动副。这种结构的优越性是明显的:首 b
其目 的在于使该机构具有良 好的吸振能力, 即具有良 减 好的
振效果, 亦即动平台上下、 左右、 前后都能自 如运动, 无卡 滞现象,或者说运动能从 A向B C , 方向传递,同时运动也
与力偶的合力作用下关节两端的 最大相对变形量, 为作用 F
于当量转动副外力的合力,为柔性关节点两端面间的距离。 1 由图3 可知,当该并联机构上平台 ( 动平台)由于惯性 力及重力作用下上平台有一向下的负载,机构振动时相当 -一
图2 R 第二支路的 3 C中 R 机构死点及死区分析
C3
() b
图1 C 3R 减振平台主体并联机构的 R 演化机构
先它克服了各转动副的间隙及累加误差, 可提高减振平台的
灵敏度, 其次可有利于各副恢复原来平衡位置状态, 有利于