基于数字摄像头的商标激光自动切割系统的设计
基于视觉识别的核桃切分机结构设计
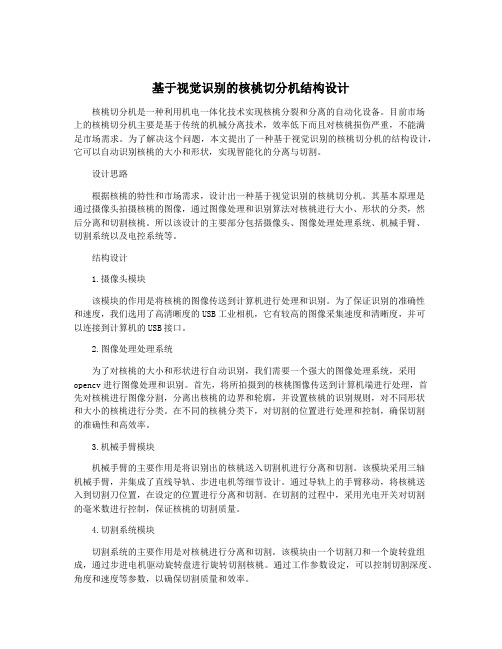
基于视觉识别的核桃切分机结构设计核桃切分机是一种利用机电一体化技术实现核桃分裂和分离的自动化设备。
目前市场上的核桃切分机主要是基于传统的机械分离技术,效率低下而且对核桃损伤严重,不能满足市场需求。
为了解决这个问题,本文提出了一种基于视觉识别的核桃切分机的结构设计,它可以自动识别核桃的大小和形状,实现智能化的分离与切割。
设计思路根据核桃的特性和市场需求,设计出一种基于视觉识别的核桃切分机。
其基本原理是通过摄像头拍摄核桃的图像,通过图像处理和识别算法对核桃进行大小、形状的分类,然后分离和切割核桃。
所以该设计的主要部分包括摄像头、图像处理处理系统、机械手臂、切割系统以及电控系统等。
结构设计1.摄像头模块该模块的作用是将核桃的图像传送到计算机进行处理和识别。
为了保证识别的准确性和速度,我们选用了高清晰度的USB工业相机,它有较高的图像采集速度和清晰度,并可以连接到计算机的USB接口。
2.图像处理处理系统为了对核桃的大小和形状进行自动识别,我们需要一个强大的图像处理系统,采用opencv进行图像处理和识别。
首先,将所拍摄到的核桃图像传送到计算机端进行处理,首先对核桃进行图像分割,分离出核桃的边界和轮廓,并设置核桃的识别规则,对不同形状和大小的核桃进行分类。
在不同的核桃分类下,对切割的位置进行处理和控制,确保切割的准确性和高效率。
3.机械手臂模块机械手臂的主要作用是将识别出的核桃送入切割机进行分离和切割。
该模块采用三轴机械手臂,并集成了直线导轨、步进电机等细节设计。
通过导轨上的手臂移动,将核桃送入到切割刀位置,在设定的位置进行分离和切割。
在切割的过程中,采用光电开关对切割的毫米数进行控制,保证核桃的切割质量。
4.切割系统模块切割系统的主要作用是对核桃进行分离和切割。
该模块由一个切割刀和一个旋转盘组成,通过步进电机驱动旋转盘进行旋转切割核桃。
通过工作参数设定,可以控制切割深度、角度和速度等参数,以确保切割质量和效率。
激光切割视觉系统单目摄像机快速标定方法
第48卷第7期2018年7月激光与红外LASER&INFRAREDVol.48,No. 7July, 2018文章编号:1001-5078 (2018)07-0880-05 •光电技术与系统-激光切割视觉系统单目摄像机快速标定方法杨煜俊,陈洵凛,许征波(广东工业大学机电工程学院,广东广州510006)摘要:针对目前激光切割机结合视觉切割行业中现有的张正友一般圆点标定算法中存在计算量大、结果不稳定的问题。
提出一种基于九圆点的摄像机自标定算法。
算法首先计算出图像和定义在世界坐标系X-F平面上的模板之间的单应性矩阵,利用该单应性矩阵线性求解出摄像机内参,然后考虑非线性畸变因素,求解出畸变系数。
最后在矫正后的模板中求出内外共八个仿射投影矩阵,并取其均值做为最终投影矩阵来求解出世界坐标。
实验结果表明:该算法比现有的基于圆点的摄像机自标定算法更快速、更稳定,达到精度更高。
关键词:九圆点;摄像机自标定;单应性矩阵;仿射投影矩阵中图分类号:TP391. 41 文献标识码:A D O I:10. 3969/j.issn.1001-5078.2018.07.015Monocular camera fast calibration mettiod for lasercutting vision systemY A N G Y u-j u n,C H E N Xun-lin,X U Z h e n n-b o(School of Electromechanic Engineering,Guangdong University of Technology,Guangzhou 510006,China)Abstract :As the existing Zhang Zhengyou general dot calibration algorithm has a large amount of calculation and theunstable results in the current visual cutting industry with laser cutting machine,a self-calibration algo nine-dotted camera i s proposed. The homography matrix bet^veen the image and the template defined on t of the world coordinate system i s calculated. The homography matrix i s used t o linearly solve the the camera,and then t he distortion coefficient i s solved considering the nonlinear distortion fac t o r. Finally,eight afineprojection matrices are obtained in the corrected template,and the mean value i s taken as the solve the world coordinates. The experimental results show that the algorithm i faster and more stable than the e dot-based camera self-calibration algorithm.K e y words:nine dot;camera self-calibration;homography matrix;affine projection matrix1引言相机标定是计算机视觉领域中的一项重要研究 课题,是实现3D重建、视觉测量的基础。
基于机器视觉的便携式激光切割系统设计

三部分构成。为保证设备便携,激光器系统由多个可拆解和组合的模块组成,设计并实现了将多束
小功率激光器进行合束,从而达到大功率输出,实现高能量切割径规划,以实现在地面完成对高塔上切割过程的监控和引导伺服系统完
成自动切割。实验结果表明,机器视觉算法准确性高,切割效果较为理想。
C H N ;©School of Electrical and Information Engineering, Tianjin University, Tianjin 300072, C H N )
Abstract :In the process of power tower installation, the position of the preset holes of the two angle steels is often misplaced,causing the bolts can ’t pass through.To solve this problem,the laser cutting machine is needed for reaming and cutting.In this paper, a portable laser cutting and drilling system based on the machine vision is proposed, which realizes the cutting and drilling of the displaced holes in the long dis tanced and high iron tower.The system consists of three parts :laser system, control and execution sys tem , transmission cable.In order to make the device portable, the laser system is composed of several detachable and combined modules.Multiple low-power lasers are designed to combine beams, so as to achieve high-power output and high-energy cutting operation.The control and execution system uses machine vision for image capturing and cutting path planning, in order to complete the monitoring of cutting process on the tower and guide the servo to automatic cut on the ground.The experimental results show that the machine vision algorithm has achieved higher accuracy and better cutting effect.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运 动 控制 模块 编程 用 到 了 D Ldi r需 要包 含 两个 头 文件 : L v , re
将 机器视 觉和 运动控 制有 机结 合 ,在 激光 头上 安装 一个 贴 片发光 di r r e. O.。为使编 程逻 辑 清 晰 以及程 序 功 能模 块化 , 定 义 v h和 S h 又
图 1 基 于 步 进 电机 的 运 动控 制 模块 原 理 图
V
D0 l 8
因 为最终 要实现 激光 头恰 好沿着 商标 轮廓 切割 而 不能 损坏 商 标 ,所 以在激 光头进 行切 割之 前必 须得 到商标 轮廓 点 以及 切割 前
激 光头 在激光 切割 工作 台坐标 系 中的坐标 。 为实现 此 目的, 本系 统
高 、 本低 。该系统 集光 学 、 CD摄像 机 标定 技术 、 成 C 图像处 理技 术 、
图 2 L D 第 一位 置 E 图 3 L O 第二 位 置 E
可 以求 出空 间坐标 系和 激光 切割 工作 台标系 的夹 角 。同 时把第 二 点 的坐标 保存 下来 以求 当前 激光 头 的实际位 置 。因计 算步 进 电机 驱动 器脉 冲 的数 目用相 对坐标 ,所 以只对 经过 图像 矫 正后 的商 标 图像 轮廓 点坐标 及 当前 激光 头坐标 进行 旋转 坐标 变换 即可 ,旋 转 角度 即 为利 用 L D 求 出 的空 间坐 标 系和 激 光 切割 工 作 台坐 标 系 E 的夹 角 。得 到 了商标 图像 轮廓 点及 当前激 光头 在激 光切 割 工作 台 中 的坐标 ,就可 以利用 数控 中的直线 插补 算法 编程 驱动 步进 电机 完 成 商标 图像 的 自动 切割任 务 。
基础 。
本 商标 激光 自动 切割 系 统 中用 到 x Y两 个 步进 电机 带动 激 、
光 头完 成切割 任 务 。 驱动 步进 电机 需要 一个驱 动 电路 , 动 电路接 驱
1 模 块 功 能 的 具 体 实 现
本 商标激 光 自动切 割系 统中 没有用 位移 传感 器 ,其运 动控 制
即 空 间坐 标 系 和 激 光 切 割 工 作 台坐 标 系 夹 角和 当前 激 光 头 的 位 置 。
关 键 词 : 光 自动 切 割 ; 动 拧 制 ; 光 二 极 管 激 运 发
0 引 言
商标 切割是 指把 已经织 出或 者绣 出 的一组或 一 批商 标 图案从 坯布 上一 个个地 分离 出来 。 目前 在 国 内制造 业 中采 用的 商标 切割 方法 主要 有: 工裁 剪、 剪 、 用进 口机 器视觉 系统 的激 光切 割 。 手 冲 采
D I o
DO3 DO5 Do7 DI Do
U兀 r w
PUL
DO 4
步 进 电机 驱 动 器
DO 6
D 8 o
步进 电机
Dn PUL
D 1 0 0
机械执行机构 ( 光头) 激
Do l 4 Do l 6
D01 5
D0 I 7 Do l 9
前两 种方 法劳动 强度 大、 效率低 , 后一 种方法 效率 高 、 劳动 强度 小 ,
但进 口成 套的机 器视 觉系 统需要 几 百万 , 本 高昂 。 成 采 用一 般的 U B数 位 摄像 头 的商标 激 光 自动 切 割系 统 , 用 S 利 软件控 制 , 实现 商标 的 自动 切割 , 自动 化程度 高 、 劳动 强度 小 、 效率
运动控 制技 术等 多种技 术于 一体 , 是典 型 的光机 电一体 化设 备 。
运 动控 制模 块 是 商标 激光 自动切 割 系统 中 的必 要 组成 部分 ,
此模块 把运 动控 制技术 与机 器视 觉技 术有机 结合起 来 ,即用 到 了 基于机器 视 觉的运 动控 制技 术 。对 于基 于机 器视觉 的运 动控 制 技 术的研 究 , 国 内外 尚处 于起 步阶段 。 在 通过对 基 于机器 视觉 的运 动
人 机 交 瓦 界面
本 商标 激 光 自动 切割 系 统 采 用 P L 8 8 C - 1 L板 卡 给 x和 Y 向
的 两个步 进 电机驱 动器 及 L D发控 制信 号和 脉冲 信号 。 线必 须 E 接
兼顾 编程 的方 便 , 线示 意 图如 图 4所示 。 接
D 00
D 2 O
控 制技术 作进 一步深 入应 用性研 究 和开 发 ,将 有助 于 改造传 统 数 控装 备制造 业 , 并为 许多 高科技 产 品的开 发奠 定关键 技术 基础 。 此
外, 还可 实现 巨大的 技术跨 越 , 底打 破发 达 国家对运 动控 制 技术 2 步 进 电 机 控 制 彻
的垄 断 ,为 我 国基于机 器视 觉的运 动控 制技 术 的深层 次应 用 奠定
羹
sj z hyh。 eui iza
ห้องสมุดไป่ตู้
基于数字摄像 头的商标激光 自动切 割系统 的设 计
刘 祥燕 吴 世 林
( 武汉纺织大学机 电工程学院, 湖北 武汉 4 0 7 ) 30 3
摘 要 : 绍 了基 于机 器 视 觉 的 商 标 激 光 自动 切 割 系 统 中 的 运 动控 制 模 块 的设 计 , 述 了如 何 用发 光 二 极 管 确 定 用 于 坐 标 转 换 的 旋 转 角 度 介 论
受 两路信 号 :指示 电机转 向的方 向信号 和控 制 电机 转 动 的控制 脉 冲 信号 。 方 向信号 为高 电平 时 若 电机正 转; 则为 低 电平 时 , 否 电机
反转 。控 制脉 冲信 号 由 1变成 0时 步进 电机走 一步 。
模块 要实现 以下 3 个功 能: 定用 于坐标 转换 的旋 转 角度 : 定当 确 确 前激 光头 的位 置 ; 制激 光 头完 成商 标 切割 任 务 。x、 两 个步 进 控 Y 电机是 此模 块的核 心 , 模块 是基 于步 进 电机 的运 动控 制模 块 , 此 其 原理 图如 图 l 示 。 所