无碳小车轨迹建模与参数优化_卞玉帅
无碳小车轨迹模拟及转向机构的优化

无碳小车轨迹模拟及转向机构的优化李杰;谢良喜;马昭;陈建文;章毅;田志翔【摘要】为了设计能自动绕障的无碳小车,建立了曲柄摇杆转向机构的数学模型,采用MATLAB进行小车轨迹模拟,发现转向机构的初始参数不尽合理.采用CAD模拟与数值分析相结合的方法,对转向机构参数进行了优化,最终设计出较优的曲柄摇杆转向机构,在此基础上设计、制作了无碳小车,取得了良好效果.【期刊名称】《机械工程师》【年(卷),期】2015(000)007【总页数】3页(P36-38)【关键词】无碳小车;曲柄摇杆机构;MATLAB;优化处理【作者】李杰;谢良喜;马昭;陈建文;章毅;田志翔【作者单位】武汉科技大学机械自动化学院,武汉430081;武汉科技大学机械自动化学院,武汉430081;武汉科技大学机械自动化学院,武汉430081;武汉科技大学机械自动化学院,武汉430081;武汉科技大学机械自动化学院,武汉430081;武汉科技大学机械自动化学院,武汉430081【正文语种】中文【中图分类】TP391.70 引言全国大学生工程训练综合能力竞赛命题中,有一项主题为“无碳小车越障竞赛”,要求小车利用重块的重力势能驱动,在前行时能够自动绕过赛道上按一定间隔设置的障碍物,以小车成功绕障数量和前行的距离和来综合评定成绩。
此命题对小车的运行轨迹有着很高要求,而转向机构设计是保证小车按最优轨迹运行的关键。
较好的转向机构方案的有4种,分别是曲柄摇杆机构、曲柄摆杆机构、空间四杆机构和正弦机构。
经过综合比较,我们选用曲柄摇杆机构作为小车转向机构。
为了提高设计质量,需要在设计阶段对小车运行轨迹进行模拟,并根据模拟结果,对转向机构进行参数化优化。
图1 曲柄摇杆机构模型图1 转向机构的数学建模如图1所示为该绕障小车曲柄摇杆转向机构示意图,将机构置于直角坐标系xoy 中,摇杆的固定铰链与坐标系原点重合,机架与x轴重合,其中曲柄长度a,连杆长度d,摇杆长度c,机架长度d,曲柄与机架的夹角记为θ,摇杆与机架之间的夹角为γ。
基于工程训练的无碳小车“变距行走”的创新优化设计

Abstract:The third college students engineering training com prehensive ability of design com petition in Jiangsu province is for the carbon—free car works,and puts forward higher requirements on the basis of the previous years,var iable·pitch.According to the principle of energy conversion,the use of the gravitational potential energy driver to drive the car walks the prescribed path with directional control functions.According to mechanical principles and basic knowledge of mechanical design ,selection and reasonable structure form,
标准直齿 圆柱齿轮。轮径的大小不直接影响绕
收稿 日期 :2015—07—07 基金 项 目 :江 苏 省第 三届 大学 生工 程训 练综 合能 力竞 赛二 等 奖 作者简介:张杰 (1992一),男,江苏宿迁人,本科生 ,主要研究方向为机械设计及 自动化 。
2016年第2期 总第43卷
新 产 品开发
“8”形轨迹无碳小车转向机构优化设计及运动仿真

“8”形轨迹无碳小车转向机构优化设计及运动仿真刘洋洋【摘要】针对第五届全国大学生工程训练综合能力竞赛无碳小车越障竞赛的题目要求,依据机械原理与机械设计相关基础知识及已有的实践经验,对往届的参赛小车进行优化设计与仿真分析,并根据所得数据重新制造无碳小车.实测表明,设计完全符合题目要求,后续竞赛中也验证了该小车结构的合理性和稳定性.【期刊名称】《现代制造技术与装备》【年(卷),期】2017(000)012【总页数】2页(P92-93)【关键词】无碳小车;优化设计;仿真分析【作者】刘洋洋【作者单位】沈阳航空航天大学工程训练中心,沈阳110136【正文语种】中文引言全国大学生工程训练综合能力竞赛是教育部高等教育司发文举办的全国性大学生科技创新实践竞赛活动,是基于国内各高校综合性工程训练教学平台,为深化实验教学改革,提升大学生工程创新意识、实践能力和团队合作精神,促进创新人才培养而开展的一项公益性科技创新实践活动第五届全国大学生工程训练综合能力竞赛竞赛命题“以重力势能驱动的具有方向控制功能的自行小车”。
具体要求:设计一种小车,驱动其行走及转向的能量需根据能量转换原理,由给定重力势能转换得到。
该给定重力势能由竞赛时统一使用质量为1kg的标准砝码(¢50×65mm,碳钢制作)来获得,要求砝码的可下降高度为400±2mm。
标准砝码始终由小车承载,不允许从小车上掉落。
图1为小车示意图。
要求小车在行走过程中完成所有动作所需的能量均由此给定重力势能转换而得,不可以使用任何其他来源的能量;要求小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地;要求小车为三轮结构。
其中,一轮为转向轮,另外二轮为行进轮,且允许二行进轮中的一个轮为从动轮。
具体设计、材料选用及加工制作均由参赛学生自主完成。
图1 无碳小车1 无碳小车总体优化方案根据大赛题目要求,无碳小车应具有传动机构、转向机构、行走机构、微调机构及车架等构成。
无碳驱动小车关键参数分析

科 技 创 新
无碳 驱动小 车 关键 参数分析
李 书 环 田 源 卢 增 元 刘 东 洋
( 天津农学院 工程技 术学院, 天津 3 0 0 3 8 4 )
摘 要: 从 力 求结 构 简 单 的 角度 出发 , 确 定 了小 车结 构 方案 , 并在 此基 础 上 , 对 一 些 关键 参数 如 驱 动 力 矩 、 驱 动轮 直径 、 传动 机 构 齿轮齿数比、 凸轮推杆位移及调节参数等进行 了分析。该分析对小车的设计具有一定的参考价值。 关键 词 : 无碳 小车 ; 参数 分 析 ; 驱动 力 矩 ; 轨 迹 设 计
2 ; 由此 可知 : 图2 ( b ) 滑轮 组 产生 的拉力 最 大 , 图2 ( c ) 产 生 的拉 力 最 小。在小车前行阻力 比较小 的情况下 , 使用图 2 ( c ) 滑轮组小车前行 最稳定 ; 不过, 由于产生的力矩也会最小 , 小车启动或有些 困难。另 外, 图2 ( a ) 中, L = H, 图2 ( b ) 中, L = H / 2 , 图2 ( c ) 中, L = 2 H, 因此 , 使 用 图2 ( c ) 滑 轮组 , 小 车行 走 的距离 最 远 。 1 . 2线 轴 直径 从 上 面分 析 可 以看 出 ,在其 他参 数 不变 的情况 下 ,线 轴直 径 d 越大 , 产生的驱动力矩越大 。通常 , 小车启动需要 比较大的启动力 矩, 而 在小 车 行驶 的过程 中 , 运 动 平稳 有 惯 性 , 产生 的驱 动力 矩 可 以 小 些 。因 此 , 线 轴 可 以做 成 变 直径 锥 形结 构 , 再 通 过合 理 缠 绕线 绳 , 就可以达到小车顺利启动且稳定行走的 目的柳 。 另外 , 小 车传 动 方案 不 同 , 产 生 的驱 动 力矩 也 将不 同。 具 体应 根 据 实 际摩 擦 力矩 大小 确 定 驱动 力 矩 大小 , 进 而 确 定 小车 结 构方 案 及 相关 参数 。 2小 车 运行 轨迹 小 车前 行 过 程 中必须 能够 周 期 性 转 向 , 因此 , 行 走 的轨 迹 对 小 车结 构 的设 计起 着 决 定性 作 用 。轨 迹 设计 的原 则是 , 在 速 度 一定 的 前提 下 , 小 车 的运 动轨 迹 曲率 尽 可 能是 连 续 变化 的 , 这样 , 小 车 才 能 平稳 拐 弯行 驶 。从 这 一 角度 出发 , 小 车运 行 轨 迹 可选 择 正 弦 曲线 。 但考 虑 到周 期 运行 距 离尽 量 短些 为 好 以及 设 计 方便 , 在速 度 很低 的 情况下 ,考虑到小 车结构的简化及 障碍物间距改变之后调 整的方 ( b) 便, 可 设 定 轨 迹在 一 个 周 期 内 由直 线 段 与 圆弧 组 成 , 直 线 与 圆 弧 相 切, 且 直 线 与 圆 弧长 度 在 障 碍物 间距 调 整 后保 持 不 变 , 只 是 为 适 应 图 1 小车 设计 方 案 l驱 动力 矩 间距 变化 , 圆弧半 径 P 将 发 生 变化 同时 所对 应 的 小车 前 轮 转 角 0也 小 车前 行 以及 转 向都 需要 有 驱动 力 驱动 。 该 项 目驱 动力 来 源 于 将 发 生变 化 。 重力 势 能转 化成 的动 能 。图 2为 能量 转化 用 滑轮 或 滑 轮组 , 其 中, G 3传 动机 构 齿数 比 由于 转 向系 统 和行 走 系统 的动 力来 自于一 个 动 力 源 , 两部 分 运 为 重 物 的 重量 , 重物系在线绳上 , 另有线绳绕在线轴( 如图 1 ) 上, F 为线 绳 的拉 力 ,同时 也是 驱 动线 轴转 动 的 驱动力 , T = F d / 2为 输入 力 动的协调性就需要通过传动系统来保证。以小车走过一个 S形计 , Q = s /  ̄ r D圈 ( s 为一个 s 形 的距 矩, d 为线轴直径 。对于小车来说 , 后轮为驱动轮 , 也是输入力矩 的 当驱动轮走过一个 s形 ,它即转过 n 主要 耗 用 者 , 因此 , 小 车能 不 能 行 走 以及 能 否 稳 定 行走 与驱 动后 轮 离 , D为驱动轮直径 ) ; 同时 , 转向系统完成左拐右拐一个周期 。 依据 选 择 以齿轮 机 构 来完 成 转 向 系统 与 行走 系统 的力 矩 T n 有 关 ,在 图 1 方 案 a中 , T Q = T / u , ( U - Z 2 / Z 为齿 轮 齿 数 比 ) , 能量 损失 最少 的原则 , 图1 方 案 b中 , T o = T 。可 见 , 驱 动 力矩 T 0 与 线 绳拉 力 F 、 线轴直径 d 之间的动力传递 。使用齿轮传动 , 传动系统需要的转速 比即齿数 比 u = n o 。 当驱 动 车轮 直 径 D足够 大 , n &l , 从 简 化 结构 的角 度 , 小 车 可 以及 传 动方 案 有关 。 为实现小车行走的稳定性要求 , 驱动力矩 T 0 大小要适中 , 既不 设 计 为无 传 动 系统 。 4小 车 驱动 轮 直径 能 因为 过 大导 致 小 车 倾 翻 , 或 重 块 晃动 影 响 正 常 行走 , 也 不 能 因 为 过 小导 致 小 车不 能启 动 。 下面, 针对 影 响驱 动力 矩 的 因素 进行 分 析 。 由于小 车 的前 进 路线 是 一 条 曲线 , 后 轮 在行 走 的 过程 中就会 产 1 . 1线 绳 拉 力 生差 速 。对 于后 轮 可 以采 用 单 轮驱 动 、 双 轮 同步 驱 动 或双 轮 差 速 驱
无碳小车数字化调试系统设计

无碳小车数字化调试系统设计刘秀清;卞玉帅;万书浩;李阳【摘要】全国大学生工程训练综合能力竞赛中,S 型转向运动无碳小车传统调试方法———轨迹划线法存在工作量大、效率低的缺点,为此设计了无碳小车数字化调试系统。
该系统由便携式无碳小车调试分析仪和计算机数据处理调试平台两大部分组成,两者之间进行数据传输,共同完成对无碳小车的周期调试和轨迹调试。
采用MC9S12XS128作为控制单元,采用冒泡排序法和格拉布斯(Grubbs)准则对采集数据进行处理,利用MALAB平台进行仿真优化。
实践证明,该系统使无碳小车的调试从“凭感觉,靠手感”的盲目调试方式,改变为“数字化,可视化”的调试方式,大大提高了无碳小车的性能。
%In National Contest of Engineering Training for Comprehensive Abilities for College Students,the traditional debugging methods of S type steering motion carbon-free car-track mark-ing method has many shortcomings,such as workload,inefficiency,so we design the carbon-free car digital debug system.It is composed of two parts:the portable debugging analyzer of the car-bon-free car and the computer data processing platform.They complete the cycle debugging and the trace debugging tasks together through data transmission between them.The hardware uses MC9S12XS128 as the control unit,the data are processed by bubble sort algorithm and Grubbs criterion,and the simulation optimization is based on MALAB platform.Practice has proved that it has revised the blind debugging mode with the feeling into digitized and visualized intelligent debugging,and it has improved the performance of carbon-free car greatly.【期刊名称】《山东理工大学学报(自然科学版)》【年(卷),期】2016(030)005【总页数】5页(P40-43,48)【关键词】无碳小车;数字化调试;MC9S12XS128;冒泡排序法;格拉布斯准则【作者】刘秀清;卞玉帅;万书浩;李阳【作者单位】山东理工大学交通与车辆工程学院,山东淄博 255049;山东理工大学交通与车辆工程学院,山东淄博 255049;山东理工大学交通与车辆工程学院,山东淄博 255049;山东理工大学交通与车辆工程学院,山东淄博 255049【正文语种】中文【中图分类】TP391.8全国大学生工程训练综合能力竞赛是旨在提升大学生工程创新能力、实践能力和团队合作精神的全国性大学生科技创新实践竞赛活动,无碳小车越障赛是历届大赛的主题.无碳小车是一种将重物下落的重力势能转换为小车前进的动能来实现小车行走的装置[1].小车结构采用三轮形式,具有转向控制机构,且该机构具有可调节功能[2].大赛中要求小车能沿S形曲线绕桩前行,自动避开赛道上设置的障碍物,运行距离越长,绕过的桩数越多,小车的性能就越优越.小车的设计、加工及调试对小车性能起决定性作用.实践证明,小车的调试环节对小车性能的影响更加明显,因此寻求一种高效率的调试方案,就显得尤为重要,为此设计了无碳小车数字化调试系统.数字化调试系统由便携式无碳小车调试分析仪和计算机数据处理调试平台两部分组成.便携式无碳小车调试分析仪通过数据的采集和计算实现对无碳小车运行周期的调试,同时将采集到的数据传输到数据储存系统,便于与计算机数据处理调试平台进行数据传输.当计算机数据处理调试平台接收到调试数据后,进行处理分析,给出最佳轨迹调试方案.两者之间通过数据传输,共同完成对无碳小车的调试任务,其总体开发框架如图1所示.无碳小车调试分析仪结构框图如图2所示,计算机数据处理调试平台如图3所示. 中央控制电路是整个系统的核心,本设计采用16位的MC9S12XS128单片机作为控制单元.对使用的各个基本模块进行了初始化配置,通过对相应数据寄存器或状态寄存器的读写,实现其相应的功能.在最小系统板中,将所有引脚通过排针引出,方便在扩展板上直接插拔,这样的设计有利于保护单片机,避免在调试电源模块时将单片机烧毁.同时最小系统板上包含了MCU正常工作的电路,如时钟电路、复位电路、电源指示灯、锁相环滤波电路和BDM调试接口等,实现了整个硬件电路的模块化.HC-SR04具有20~25 000mm的非接触式距离感测功能,测距精度可高达1mm,包括超声波发射器、接收器与控制电路模块.角速度传感器利用投射式光电传感器采集小车两后轮速度特性,利用超声波传感器采集运行周期误差[3-4].显示元件选用Nokia5510点阵型LCD,其引脚SDIN、SCLK、D/C、SCE直接与单片机连接,用来显示小车当前的运动状态和超声波所测得的距离.语音播报系统选用LMD102语音模块,具有稳定可靠、可重复录音的特点,其主要控制放音方式有两种:通过4组触点控制、单片机串行总线控制.由于需要处理的数据量较大,所以选用SD卡储存系统,采用SPI操作模式,接口简单,移植也方便,速度较快,使用高速的SPI模式1M/s很容易达到.本文采用冒泡排序法对采集数据进行排序[5],从而为格拉布斯(Grubbs)准则在程序上的实现提供了保障.在数据处理上采用格拉布斯(Grubbs)准则对坏值进行剔除,并根据最小二乘法输出数据的算术平均值.在软件设计上,结合MATLAB仿真平台进行了大量的底层处理,从而选出最合理的优化方案[6].轨迹调试主要是利用MATLAB软件将便携式调试分析仪的测量数据读取出来,作出两后轮的速度曲线进行分析,以排除打滑或急回等现象[7].测试时首先根据无碳小车机械结构和转向原理示意图(如图4所示)建立无碳小车运动数学模型[8].当前轮转角为θ时,可以根据前后轴距求出小车当前的转弯半径转向角速度为两后轮的速度为:利用MATLAB绘出两后轮的速度函数图像,如图5所示.本设计建立在图5理想运动函数图像的基础上,在小车运行过程中,通过光电式传感器采集两后轮的转速,并通过MATLAB绘制出实际运行时的速度函数图像,如图6所示.(1)若出现图6(a)中所示情况,则可判定小车在运行过程中右轮出现了打滑现象,并非车体结构出现问题,不需要进行调整.(2)若出现图6(b)中所示情况,则可判定小车驱动系统中的四杆机构存在急回现象,必须调试曲柄高度等来纠正小车运行轨迹.无碳小车在轨迹调试合理的同时还必须有合适的周期,这就需要对周期进行调试.本文通过测量8个周期计算偏差距离,然后根据此偏差值进行调试.另外,由于周期的测量需要有较高的精度,因此在测量时要使测量值尽可能接近真值.为提高测量的可靠性,每次测量,超声波传感器都采集100个数据,首先采用格拉布斯(Grubbs)准则剔除可疑数据[9-10],具体步骤如下:(1)对采集的100个数据从小到大排序.(2)计算算术平均值L与算术平均值标准误差的值.(3)选择α=0.05,查询.(4)计算最大与最小偏差ν1,ν2.将与进行比较,若,则l1为坏值.将与进行比较,若,则l2为坏值.(5)对以上剔除后的数据重复步骤(1)~(4),直到不再存在坏值时为止.求解剩余后的数据的最佳值方法如下:设等精度测量的测量值为l1,l2,…,ln,假设存在一个最佳值L,各值与最佳值之间的偏差为νi,则ν1=l1-L,ν2=l2-L,…,νn=ln-L.由或然率方程…根据概率论,测量值l1,l2,…,ln同时出现的概率密度为各测量值出现概率密度的乘积[11],即由误差正态分布可知,误差小的数值比误差大的数值出现的概率大,因此最佳值应为p取最大值,即最小.令,将ν1=l1-L,ν2=Q为最小值的条件为式(14)对L微分可得由此可知,对剔除坏值后的剩余数据取算术平均值即为最佳值.使用该系统进行周期测量,只需调试者在规定周期处手持分析仪面对发车点方向,利用超声波传感器进行距离测量,便携式调试分析仪中微控制器便会提取测量数据进行自动计算,并根据计算结果自动给出最佳调试方案,并进行语音播报,使调试者能在最短时间内将周期调整到合适大小.在无碳小车机械设计方面,改进了电路的搭建方式等,使得散热困难、耗电量大的问题基本解决.在硬件方面主要是对超声波传感器进行了改进,使用桥路补偿方法,提高了测量的精确度,通过建模和仿真,最终确定使用格拉布斯准则对超声波采集数据进行处理.在图像采集和图像处理方面,以MC9S12XS128单片机为核心,结合光电式传感器的安装设计了合理的采集方法,并对采集的图像进行处理,降低了干扰.无碳小车数字化智能调试系统的研究中还有许多需要改进的地方:(1)本文的无碳小车运动模型是在理想情况下建立的,其实际情况要复杂的多,由于所建立的模型过于简单,因此研究如何进一步改进算法是十分有必要的.(2)本设计中,在与计算机数据通讯时,需要插拔SD卡,过程没有做到最简化.在以后的研究中,还需考虑使用无线传输技术实现“便携式无碳小车调试分析仪”与“计算机数据处理调试平台”的数据通讯.。
8字无碳小车的结构设计
参考文献
[1] 张 玉 航,黄力,王凯.8字 绕 障无碳 小 车 转向系统 的设 计 [J]. 科 技创新导 报,2014,(13):88-89.
[2] 吴 新良,刘建 春,郑 朝阳.重力驱动的 避 障 小 车设 计与制 造 [J].机 械 设 计,2014,31(10):25-28.
[3] 濮良 贵,纪 名 刚.机 械 设 计 [ M ].8 版.北 京:高 等 教 育出 版 社,20 0 6.
科技创新导报 2017 NO.18 Science and Technology Innovation Herald
D OI:10.16 6 6 0/ j.c n k i.1674- 0 98X.2017.18.110
8字无碳小车的结构设计①
工业技术
任帅 高远 邵梦莹 (南昌航空大学飞行器工程学院 江西南昌 330063)
1 运动原理
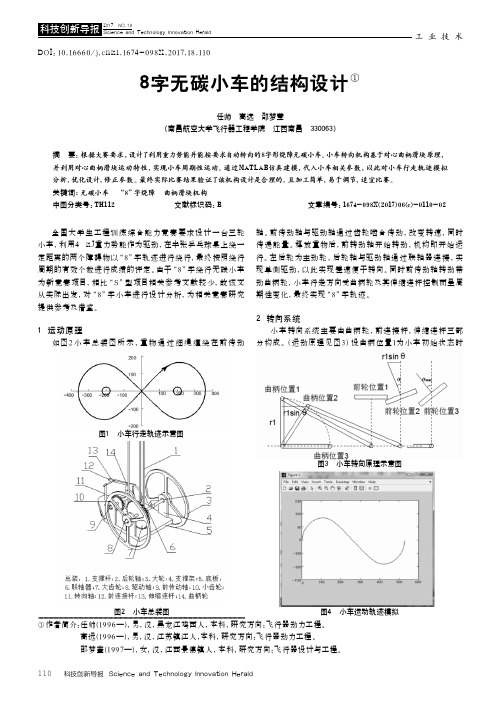
如 图 2 小 车 总 装 图 所 示 ,重 物 通 过 细 绳 缠 绕 在 前 传 动
轴。前传 动 轴 与 驱 动 轴 通 过 齿 轮 啮 合 传 动,改 变 转 速,同 时 传 递能 量。释 放 重 物后,前 转 动 轴 开始 转 动,机 构 即 开 始 运 行。左 后 轮 为主动 轮,后 轮 轴 与 驱 动 轴 通 过 联 轴 器 连 接,实 现 单侧 驱动,以 此实 现 差 速便于 转向。同 时 前传 动 轴 转 动 带 动曲柄 轮,小 车 行 走方向受曲柄 轮及其伸 缩 连 杆 控制 而呈周 期 性变化,最 终实现“8”字 轨 迹。
关键词:无碳小车 “8”字绕障 曲柄滑块机构
中图分类号:TH112
文献标识码:B
文章编号:1674-098X(2017)06(c)-0110-02
全国大学生工程训练 综 合能力竞赛 要求 设 计一台三轮 小 车,利用4 k J重力势能作为驱动,在半 张乒 乓球桌 上 绕 一 定 距离的两个 障碍 物以“8”字 轨 迹 进行 绕 行,最 终 按照绕 行 周期 的有 效个数 进行成 绩 的 评定。由于“8”字 绕 行 无碳 小 车 为 新 竞 赛 项目,相比“ S ”型 项目相 关参 考 文 献 较 少,故 该 文 从实 际出发,对“ 8”字小 车进 行 设 计 分 析,为 相 关 竞 赛 研 究 提 供 参 考及借鉴。
S型无碳小车的建模设计与运动仿真及试验
机床与液压MACHINE TOOL&HYDRAULICSApr.2019 Vol.47No.82019年4月第47卷第8期DOI:10.3969/j.issn.1001-3881.2019.08.020本文引用格式:黄志辉,宋天革,周志豪,等.S型无碳小车的建模设计与运动仿真及试验[J].机床与液压,2019,47(8):88-91.HUANG Zhihui,SONG Tiange,ZHOU Zhihao,et al.Modeling Design and Motion Simulation and Test for S Type Carbon-free Car[J].Machine Tool&Hydraulics,2019,47(8):88-91.s型无碳小车的建模设计与运动仿真及试验黄志辉,宋天革,周志豪,纪陈成,凌凯,黄国栋(无锡职业技术学院机械技术学院,江苏无锡214121)摘要:根据全国大学生工程训练综合能力竞赛的命题,设计一种可以将重力势能转化为机械能并能驱动小车行走的无碳小车。
先运用NX10.0软件对无碳小车进行建模设计、装配和运动仿真;接着根据设计的模型完成小车的零件加工和装配;最后对实物样机进行调试,记录轨迹数据,将试验结果与运动仿真的结果进行对比。
结果表明:运动仿真的轨迹基本符合小车实际情况下行走的轨迹,验证了设计方案的可行性;运动仿真小车能避开障碍物桩距范围为190-305mm,试验中小车能避开障碍物桩距范围为180-350mm,达到了预期设计要求的200-300mm,也为后期的结构优化提供了更便捷的方法。
关键词:无碳小车;建模设计;运动仿真;NX试验中图分类号:TH128Modeling Design and Motion Simulation and Test for S Type Carbon-free CarHUANG Zhihui,SONG Tiange,ZHOU Zhihao,JI Chencheng,LING Kai,HUANG Guodong(Mechanical Institute of Technology,Wuxi Institute of Technology,Wuxi Jiangsu214121,China) Abstract:According to the requirements of National College Students Comprehensive Ability Competition in Engineering Training,a carbon-free car was designed which converted gravity energy into mechanical energy and drove the car to walk.NX10.0software was applied for modeling design,assembling and motion simulation of the carbon-free car;the parts processing and assembly were finished according to the designed model;the prototype was tested,the track data were recorded and the results were compared with motion simulation.The results show that,the motion simulation basically confonns to the actual situation,which verify the feasibility of the design;the motion simulation results show the car can avoid the barrier pile spacing of190~305mm,and the test shows the car can avoid the barrier pile spacing of180-350mm,which meet the requirements of the design requirements200~300mm.It also provides a more convenient way for the later structural optimization.Keywords:Carbon-free car;Modeling design;Motion simulation;NX test0前言无碳小车具有经济、环保、便利等优点,它对传统能源的逐渐取代以及提高能量的利用率具有深远意义。
基于无碳小车的优化设计

基于无碳小车的优化设计作者:姜帅琦来源:《硅谷》2014年第10期摘要基于无碳小车的越障要求,设计一辆无碳小车,在设计、工艺、成本分析和工程管理等方面进行优化设计,通过给予一定的重力势能,依据能量转换的原理,将重力势能转换为动能等机械能来驱动小车行进。
关键词无碳小车;机械能转换;避障;工艺;成本分析中图分类号:TH22 文献标识码:A 文章编号:1671-7597(2014)10-0014-031 小车总体设计目标依据能量转换原理,给定重力势能,设计一套可将该铅垂的重力势能转换为小车动能等机械能来驱动小车行进的装置。
并且应使该小车在行进过程中能够自动避开道路上设置的障碍物。
设定给定重力势能,通过铅垂下降来获得,铅垂下落后,而且必须同小车一起运动,不允许掉落。
要求小车行进过程中完成的所有行动所需的能量均由此重力势能转换得到,不得使用任何其他形式的能量。
2 方案设计通过对小车的功能分析小车需要完成重力势能的转换、驱动自身行走、自动避开障碍物。
为了方便设计这里根据小车所要完成的功能将小车划分为六个部分进行模块化设计(车架、原动机构、传动机构、转向机构、行走机构、微调机构)。
为了得到令人满意方案,采用扩展性思维设计每一个模块,寻求多种可行的方案和构思。
在选择方案时应综合考虑功能、材料、加工、制造成本等各方面因素,同时尽量避免直接决策,减少决策时的主观因素,使得选择的方案能够综合最优。
3 车架车架既不能做得太大,又不能做的太小。
太大了,车转向不太容易控制;车架太小,小车不稳定,重块的平衡不易控制,在运行过程中,可能会出现倾倒。
车架要做的尽量轻,牢固,刚度要强,在重物的压力下变形小。
要做的轻,材料成本低且易加工,车架可选择木材加工成三角底板式,也可选择铝制成骨架式。
4 原动机构原动机构的作用是将铅垂的重力势能转化为使小车行走的动能。
多种方案都可以是实现这一功能,绳轮在效率和方便性方面是最佳的方案。
如果规则允许,采用滑轮组来将重物的重力势能转换为小车的动能,可以起到省力费距离的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者简介:卞玉帅(1990—),男,山东济宁人,本科,能源与动力工程专业,研究方向为内燃机方向。
无碳小车行走及转向的能量全部由给定重力势能转换而来,小车绕桩数量越多,前进距离越长,性能越好。
因此对无碳小车运动规律的研究对提高其性能具有重要意义。
1无碳小车整体结构为适应大赛赛题,无碳小车整体结构设计为三轮结构,前轮转向,后轮驱动,并且两后轮中一轮为主动轮,一轮为从动轮。
具体结构如图1所示。
图1无碳小车整体结构示意图2驱动系统建模分析小车行驶,当重物缓慢下落dh 时,通过牵引线带动绕线轴转动,绕线轴与后轮轴通过齿轮传动,传动比为i 12,则主动轮A 前进的距离:ds =Rdhr 1i 12绕线轴与转向系统的曲柄轴通过皮带传动,传动比为i 13,曲柄L1转过的角度:d β=dhr 1i 133转向系统的建模分析转向系统由空间RSSR 机构组成,建模求解曲柄L1的输入角β和摇杆L3的输出角θ之间的关系。
建立空间直角坐标系,具体如图2所示。
图2转向系统中空间RSSR 机构示意图铰接点坐标:A(0,0,z 0),D(x 0,0,0),B(x b ,y b ,z b ),C(x c ,y c ,z c )设计时特别要求:z c =z 0,并且当曲柄L1绕OZ 轴转动到YOZ 平面内时,摇杆L3与OZ 轴保持平行。
由几何原理得出:l 22=(x b -x c )2+(y b -y c )2+(z b -z c )2(1)根据三角关系可得:x by b z b =l 1cos βl 1sin βl 3 (2)x cy c z c=x 0+l 3cos θl 3sinθ(3)将式(2)(3)代入式(1)得:l 12-l 22+2l 32+x 02-2x 0l 1cos β=(2l 1l 3cos β-2x 0l 3)cos θ+2l 32sin θ设A=2l 1l 3cos β-2x 0l 3B=2l 32C=-(l 12-l 22+2l 32+x 02-2x 0l 1cos β)则原式可写为:Acos θ+Bsin θ+C=0求解上式得:θ=arcsinC A 2+B2姨姨姨-arcosA A 2+B2姨姨姨4小车行走轨迹4.1A 轮行走轨迹无碳小车前轮为转向轮,A 轮为主动轮,B 轮为从动轮。
当重物下落时,主动轮转动驱动小车前进,同时前轮做周期性摆动。
前轮转过的角度为θ时小车前进距离为ds ,整体转过的角度:d α=ds tan θd+a 1tan θ在地面坐标系中,小车转过的角度为α时,有:dx=-ds ·sin αdy=ds ·cos 姨α4.2小车其他轮的轨迹以轮A 为参考,在小车的运动坐标系中,轮B 的坐标B(-(a 1+a 2),0),C 的坐标C(-a ,d )在地面坐标系中,有:x B =x A -(a 1+a 2)·cos αy B =y A -(a 1+a 2)·sin 姨αx C =x A -a 1·cos α-d sin αy C=y A+d ·cos α-a 1sin 姨α在程序中给各参数赋初始值,通过不断地对各参数进行调整,最终得出较为合理的轨迹函数图像,如图3所示。
从函数图像中看出,曲线光滑、连续,没有较大的突变,此时的各参数值即为理论上的最优值,具体值为:齿轮传动比i 12为0.2,带传动比i 13为0.37,绕线轴半径i 1为6,后轮半径R 为150,曲柄L1为13.47,连杆L2为94.7,摇杆L3为74.5,a 1为60,a 2为60,d 为150。
(下转第173页)无碳小车轨迹建模与参数优化卞玉帅陈正强晁兴旺(山东理工大学交通与车辆工程学院,山东淄博255049)【摘要】无碳小车以“S ”形轨迹绕桩运行,轨迹曲线的平滑度和形状直接决定了小车的稳定性和绕桩数量。
通过建立数学模型,对无碳小车的运动过程进行分析,对模型中各参数进行不断地调整,最终获得了具体的分析结果和直观的轨迹函数图像,从而确定了影响小车运行轨迹的各参数最优值。
为无碳小车的调试和优化奠定了基础。
【关键词】无碳小车;轨迹曲线;数学模型得知识和技能,利于开发智力。
“摩尔庄园”是一个专门针对儿童的网上虚拟乐园,以“健康、快乐、创造、分享”为主题。
在摩尔庄园里,可以在农场里种植蔬菜,饲养动物,装扮自己,选择喜欢道具,跟伙伴一起玩游戏、打水仗、捉迷藏,玩滑雪比赛。
通过各种活动参与,增长知识与技能。
“游戏学堂”是由昱泉信息技术(上海)有限公司设计,游戏学堂注重做中学,学中玩,将学习与快乐创造性地结合在一起,不仅使学习的形式立体化、生动化和趣味化,而且更能激发学习者的兴趣和主动性,让学习者在游戏学堂中学会学习,学会创造、学会交流,有效提升学习效果。
“奥卓尔”是由珠海奥卓尔软件有限公司设计,游戏是以“快乐学习,健康成才”的理念,将教学内容融入故事和游戏中,教学内容与最新教材配套,游戏与教学内容同步,让学习者在“玩”中学习,从而充分调动学习兴趣,利于提高学习效果。
游戏主要是角色扮演+养成类的游戏模式,参与者通过扮演探险家,在探险的过程将学习到的知识,去解决所遇到的困难,利于提升学习者的综合素质。
《奥比岛》由广州百田信息科技有限公司研发运营,为中国6-14岁的儿童提供安全、健康、有趣的互联网服务,让儿童能够在绿色的虚拟世界中,充分发挥自己的想象力和创造力,满足自己的童年梦想,从而培养更加健康积极的人生观和世界观。
“赛尔号“是上海淘米公司发布的是一款专为中国儿童开发的科幻的社区养成类网页游戏。
专为7-14岁儿童开发的儿童虚拟社区游戏,以健康、快乐、探索、智慧理念,探寻太空新能源为主题,设计了安全健康的太空科幻探险虚拟飞船“赛尔号”。
“浪漫庄园”是由北京天成胜境科技有限公司(北京乐游网)基于Game3.0理念,自主研发的一款集娱乐、模拟、养成的大型社区类网游。
游戏集合了多种DIY 元素,以“建造”、“自由”、“开放”贯穿整个游戏架构。
4教育游戏发展及应用存在的困难与阻碍教育游戏的设计开发及应用尚处于尝试与探索阶段,教育游戏的潜力发展还面临较多困难和阻碍,比如,教育游戏的设计中,教育思路倾向严重,教育性与娱乐性的不平衡;游戏缺乏创新性,吸引力不足;教育游戏产品单一,风格单调;教育游戏的应用比较少,局限于个别学科上;教育人员与游戏开发人员的沟通度不够,教育游戏软产品不能满足实际的教学需要;教育游戏研发商业性比较强;社会各阶层尚未形成成熟的教育游戏观等,这些我们都需进一步的研究、探索与尝试。
5教育游戏应用的几点思考随着教育游戏应用广泛化的提高,必将使教育本身与新技术结合得更加密切,目前新技术的发展尤其是计算机技术,3G 、4G 技术为教育游戏开拓了应用广度,教育游戏的发展潜力将不断提高。
1)教育游戏作为新的学习资源可以更加丰富教学形式,可大胆尝试融于实际的课堂教学中,教育游戏的趣味性、挑战性、教育性、竞争性和交互性的特点在课堂教学或自主学习中,都有利于提高游戏者思的维能力,反应能力、解决问题能力及创造力。
2)教育游戏作为虚拟的学习环境,为学习者提供与现实世界一样的环境,容易引发兴趣。
在创造环境上,以接触、强化、应用为手段,反复的科学的强化对知识的记忆,在有效的应用过程中来使用知识,来帮助学生克服抽象和较少接触的学习内容,人为的创造环境来突出学习内容的应用环境。
3)教育游戏作为校本课程资源和网络课程资源,丰富教学方式及学习方式,在游戏过程中潜移默化的影响到学习者的知识建构。
4)“轻游戏”为教育游戏融于教学提供了一个较好的设计思路,可实现游戏与教育的可行性结合,就目前较好的可以解决“教育性”与“游戏性”的平衡问题,在实践教学中比较可行的解决教育游戏在教学中应用的问题,更有利于推动学习者进行探究学习。
【参考文献】[1]吕森林.教育游戏产业研究报告[J].中国远程教育,2004.[2]尚俊杰,李芳乐,李浩文.“轻游戏”:教育游戏的希望和未来[J].电化教育研究,2005.[3]方芳.教育游戏的理论基础及应用模式[D].上海:上海交通大学,2007.[4]朱玉萍.教育游戏发展前景调查与分析[J].枣庄学院学报,2010.[责任编辑:丁艳]S图3无碳小车运行轨迹函数图像5结论本研究针对影响无碳小车运行的主要机构进行建模分析,编制计算机程序,通过调整各参数来优化小车轨迹函数,并作出函数图像。
从函数图像中看出,曲线光滑、连续,没有较大的突变,从而确定出合理的参数。
【参考文献】[1]杨可桢,程光蕴,李仲生.机械设计基础[M].5版.北京:高等教育出版社,2006.[2]哈尔滨工业大学理论力学教研室.理论力学(Ⅰ)[M].7版.北京:高等教育出版社,2009,7.[责任编辑:丁艳]S(上接第136页)图1上海富士康大厦施工组织设计模拟截图马克思说过,制造和使用工具是人类进化的重要因素和人类诞生的重要标志。
可见工具的应用和工具的进步是推动人类历史和社会进步的正能量,它解放了生产力。
BIM 技术也是一种工具,无论是硬件的提升还是软件的飞跃,它势必不可忽略的改变这个世界和这个行业。
在人类历史上,任何一次工具、方法或理念的提升,都将带来新的产业革命。
也许,我在这里说BIM 会改变世界,不免夸张,但是立身于当今高度开放、高速发展的中国,直面汹涌而来的国际化大潮,我们无法逃避。
我相信通过循序渐进的引进,厚积薄发的积累,我们一定会寻找到一条符合中国国情的道路。
[责任编辑:曹明明](上接第171页)。