11基于车辆稳态动力学特性的汽车动态轨迹规划
车路协同环境下的轨迹级交通控制

06
结论与展望
研究成果总结
1 2
轨迹级交通控制技术的提出
针对传统交通控制方法在车路协同环境下的不足 ,提出了轨迹级交通控制技术,为交通控制提供 了新的思路和方法。
算法设计与实现
设计了基于轨迹预测的交通控制算法,实现了对 车辆轨迹的精确预测和交通流的有效控制。
考虑多源异构数据融合和决策优化
在决策过程中,需要考虑到多源异构数据融合和决策优化技术,以提高决策的准确性和效 率。
05
车路协同环境下轨迹级交通控 制实验验证
实验场景设计与搭建
01
02
03
实验场地选择
选择合适的实验场地,包 括道路类型、交通状况等 ,以模拟真实的交通环境 。
实验设备部署
部署车路协同设备,包括 车辆、路侧单元、交通信 号灯等,以实现车路协同 通信和控制。
轨迹级交通控制是智能交通系统中的 一种重要控制方式,能够实现对车辆 轨迹的精确控制。
车路协同技术
车路协同技术是智能交通系统的重要 组成部分,能够实现车与路之间的信 息交互和协同控制。
研究现状与问题
研究现状
目前国内外学者在车路协同技术 和轨迹级交通控制方面已经取得 了一定的研究成果,但仍存在一 些问题需要解决。
通控制。
车路协同关键技术
传感器技术
无线通信技术
利用各种传感器,如雷达、摄像头、超声如5G、C-V2X 等,实现车辆与车辆、车辆与道路基础设 施之间的信息传输和共享。
协同决策技术
控制执行技术
根据感知层获取的信息和通信层传输的数 据,进行轨迹级交通控制和协同决策。
基于Attention机制和递归思想的LSTM车辆轨迹预测

基于Attention机制和递归思想的LSTM车辆轨迹预测作者:张恒陈焕明党步伟王继贤来源:《青岛大学学报(工程技术版)》2024年第02期摘要:针对现有车辆轨迹预测模型在长时预测方面准确性不足的问题,基于Attention机制和递归思想的长短时记忆网络(long short-term memory, LSTM)构建了一种新型的车辆轨迹预测模型,即ATT-LSTM(RE)模型,使用编码器–解码器架构更精确地预测车辆未来的行驶轨迹。
研究结果表明,模型意图识别的准确率为91.7%,F1分数、召回率、精确率均在0.872 ~0.977之间;1 s、2 s、3 s、4 s、5 s的终点轨迹预测的均方根误差为0.52 m、1.07 m、1.69 m、2.58 m、3.31 m,优于同类型模型。
关键词:车辆轨迹预测;意图识别;长短时记忆网络; Attention机制;递归思想中圖分类号:TP391.41文献标识码: A文章编号: 10069798(2024)02007409; DOI: 10.13306/j.10069798.2024.02.011收稿日期: 20240402; 修回日期: 20240515基金项目:山东省高等学校科技计划项目(J18KA048)第一作者:张恒(1998 ),男,硕士研究生,主要研究方向为车辆系统动力学仿真与控制。
通信作者:陈焕明(1978 ),男,博士,副教授,主要研究方向为车辆系统动力学仿真与控制。
Email:*************.cn随着科技的进步和人们生活水平的提高,汽车已成为日常生活中不可或缺的交通工具。
为了提升驾驶安全性和稳定性,准确识别驾驶员的驾驶意图及精确预测车辆行驶轨迹变得至关重要。
对车辆轨迹的预测方法有两种:基于模型建模和基于数据驱动。
基于模型建模的轨迹预测方法多通过建立车辆运动学或动力学模型,依托各种参数间的数学关系来预测车辆的行驶轨迹[1],如利用恒定角速度和加速度模型并结合意图识别的多项式轨迹规划来预测车辆轨迹[2]。
基于最优预瞄和模型预测的智能商用车路径跟踪控制
J Automotive Safety and Energy, Vol. 11 No. 4, 2020462—469基于最优预瞄和模型预测的智能商用车路径跟踪控制李耀华,刘 洋,冯乾隆,南友飞,何 杰,范吉康(长安大学汽车学院,西安710064,中国)摘要:为解决智能商用车路径跟踪问题,采用一种最优预瞄控制策略。
根据商用车航向角与路径曲率的关系,引入航向角偏差反馈控制;根据车速与预瞄距离的关系,提出了变权重因数的多点预瞄距离确定方法。
为了保证商用车路径跟踪的稳定性,采用模型预测控制策略,对车轮侧偏角进行约束。
通过TruckSim与Simulink联合仿真,对比分析了侧向偏差、横摆角速度和前轮侧偏角变化情况。
结果表明:最优预瞄控制策略对车速变化具有较好的适应性,但当路面附着因数较低时,车辆会失去稳定性;模型预测控制策略对车速和路面附着因数变化都具有较好的适应性,行驶稳定性更好,且比最优预瞄控制策略具有更精确的路径跟踪效果。
关键词:智能商用车;路径跟踪;路面附着因数;最优预瞄控制;模型预测控制中图分类号: U 471.15 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2020.04.005Path tracking control for an intelligent commercial vehicle based on optimal preview and model predictiveLI Yaohua, LIU Yang, FENG Qianlong, NAN Youfei, HE Jie, FAN Jikang(School of Automobile, Chang’an University, Xi’an 710064, China)Abstract: An optimal preview control strategy was adopted to solved path tracking problem of intelligent commercial vehicles. According to the relationship between the heading angle and the curvature of the path,the heading angle deviation feedback control was introduced. According to the relationship between the speedand the preview distance, a multi-point preview distance determination method with variable weight coefficientwas proposed. In order to ensure the stability of path tracking, the model predictive control was used to restrictthe wheel sideslip angle. Through co-simulation of TruckSim and Simulink, the lateral deviations, the yaw ratesand the front wheel slip angles were compared. The results show that the optimal preview control has good adaptability to the speed, but when the road adhesion factor is low, the vehicle will lose stability; The model predictive control has better adaptability to speeds and road adhesion factors, and has better driving stability,and has more accurate path tracking effect than the optimal preview control.Key words:i ntelligent commercial vehicles; path tracking; road adhesion factors; optimal preview control;model predictive control收稿日期 / Received :2020-07-18。
自动驾驶汽车的路径规划与控制策略研究

自动驾驶汽车的路径规划与控制策略研究随着科技的不断发展和人们对出行安全和便利性的需求增加,自动驾驶汽车逐渐成为现实中的一种交通选择。
自动驾驶汽车的核心技术之一是路径规划与控制策略。
在本文中,我们将探讨自动驾驶汽车的路径规划和控制策略的研究现状、挑战以及未来发展方向。
路径规划是自动驾驶汽车系统中至关重要的一个环节,其目标是确定车辆在道路上的最佳行驶路径。
首先,路径规划需要获取车辆周围的环境信息,如道路地图、交通流量、障碍物信息等。
这些信息可通过传感器、卫星定位、摄像头等手段获取。
其次,路径规划需要考虑到多个因素,如车辆的速度、安全距离、车辆动态特性等。
同时,还需要综合考虑行驶效率和乘客的舒适度。
最后,路径规划需要通过算法和模型,将这些信息整合起来,生成一条最佳路径,使得车辆能够安全、高效地到达目的地。
路径规划算法的选择是自动驾驶汽车研究中的一个重要问题。
目前,研究者们提出了多种路径规划算法,如基于搜索算法的A*算法、Dijkstra算法,以及基于优化的遗传算法、模拟退火算法等。
其中,A*算法是一种常用的路径规划算法,它通过估计目标距离和启发式函数来快速搜索最佳路径。
遗传算法则是一种基于进化的优化算法,通过模仿生物进化的过程,不断优化路径规划结果。
这些算法各有优劣,如何选择合适的算法取决于具体的应用场景和需求。
与路径规划相对应的是控制策略,在路径规划的基础上,控制策略负责将车辆实际驾驶轨迹与规划轨迹相匹配。
控制策略需要考虑到车辆的动力学特性、环境因素以及驾驶员的操作意图。
传统的控制策略包括PID控制器、模糊控制器等。
PID控制器根据车辆的误差、偏差和积分来调整方向盘、刹车和油门等控制输入。
模糊控制器则基于模糊逻辑推理来调整控制输入。
近年来,深度学习技术的发展为控制策略提供了新的思路。
例如,卷积神经网络(CNN)和循环神经网络(RNN)可以用于实现端到端的控制,将传感器输入直接映射到控制输出。
这种端到端的控制策略可以减少路径规划和控制之间的耦合,并提高车辆的自主性。
基于车辆稳态动力学特性的汽车动态轨迹规划_孙浩

{
[
]}
( 10 ) θ t = θ0 ± ( 11 )
该解析表达式表达的是汽车在给定速度下, 对应于不同的转角输入其运动学的响应 , 可以较 为准确地反映车辆的运动轨迹, 而且数值计算效 率高、 实时性好。 2. 2. 2 模型参数识别 k2 , 稳态动力学模型存在参数 k1 、 在实车以及 k2 不仅仅是前轮、 k1 、 后轮的 主流动力学模型中, 侧偏刚度, 通常无法直接给出, 需要经过参数识别 得出。 本文利用 Carsim 稳态转向实验数据, 通过
Illustration of traffic vehicle trajectory prediction
第6 期
等: 基于车辆稳态动力学特性的汽车动态轨迹规划 孙浩,
· 173·
获得。 首先, 通过“采样 ”将不同时刻交通车的位 置投影到道路网格中。 则未来任意时刻交通车在 该坐标系下的坐标均可以由式 ( 4 ) 确定。 式 ( 4) 得出该交通车在未来任意时刻所占据的空间 位置。
· 172·
国防科技大学学报
第 35 卷
1
整体方案描述
2
2. 1
车辆动态轨迹规划
交通车轨迹预估以及搜索空间建立
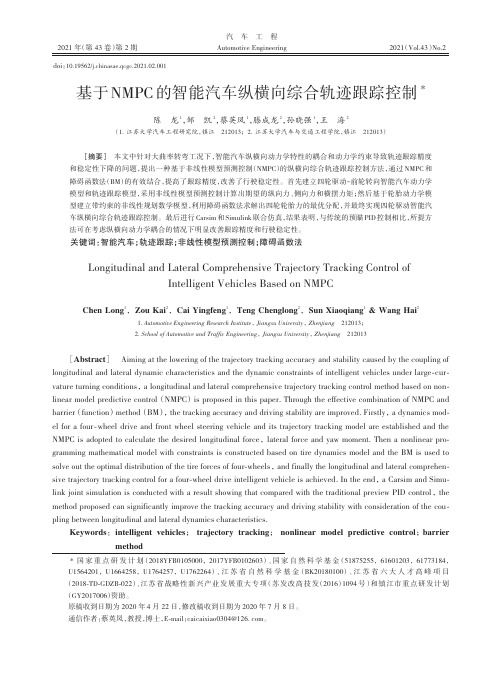
设 本文介绍的轨迹规划方法采用“模块化 ” 计思想, 根据功能进行模块划分和设计, 如图 1 所 。“汽车行驶环境模块 ” 示 包含道路信息, 如车道 ; “交通车辆模块 ” 宽度、 车道数目、 路面附着系统 ; “轨迹规划模块 ” 预估交通车状态 在每次规划周 期开始时获得当前时刻下的主车以及相关交通信 ; “轨迹跟随控制模块 ” 息并进行轨迹规划 接受规 划轨迹并产生方向盘转角、 油门开度、 制动踏板角 ; “车辆动力学模块 ” 度等控制信号 接受到控制信 号后产生相应的响应, 即实际轨迹; 主车状态在规 划周期开始时实时更新。
基于NMPC的智能汽车纵横向综合轨迹跟踪控制
2021年(第43卷)第2期汽车工程Automotive Engineering2021(Vol.43)No.2 doi:10.19562/j.chinasae.qcgc.2021.02.001基于NMPC的智能汽车纵横向综合轨迹跟踪控制*陈龙1,邹凯2,蔡英凤1,滕成龙2,孙晓强1,王海2(1.江苏大学汽车工程研究院,镇江212013;2.江苏大学汽车与交通工程学院,镇江212013)[摘要]本文中针对大曲率转弯工况下,智能汽车纵横向动力学特性的耦合和动力学约束导致轨迹跟踪精度和稳定性下降的问题,提出一种基于非线性模型预测控制(NMPC)的纵横向综合轨迹跟踪控制方法,通过NMPC和障碍函数法(BM)的有效结合,提高了跟踪精度,改善了行驶稳定性。
首先建立四轮驱动-前轮转向智能汽车动力学模型和轨迹跟踪模型,采用非线性模型预测控制计算出期望的纵向力、侧向力和横摆力矩;然后基于轮胎动力学模型建立带约束的非线性规划数学模型,利用障碍函数法求解出四轮轮胎力的最优分配,并最终实现四轮驱动智能汽车纵横向综合轨迹跟踪控制。
最后进行Carsim和Simulink联合仿真,结果表明,与传统的预瞄PID控制相比,所提方法可在考虑纵横向动力学耦合的情况下明显改善跟踪精度和行驶稳定性。
关键词:智能汽车;轨迹跟踪;非线性模型预测控制;障碍函数法Longitudinal and Lateral Comprehensive Trajectory Tracking Control ofIntelligent Vehicles Based on NMPCChen Long1,Zou Kai2,Cai Yingfeng1,Teng Chenglong2,Sun Xiaoqiang1&Wang Hai21.Automotive Engineering Research Institute,Jiangsu University,Zhenjiang212013;2.School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang212013[Abstract]Aiming at the lowering of the trajectory tracking accuracy and stability caused by the coupling of longitudinal and lateral dynamic characteristics and the dynamic constraints of intelligent vehicles under large‑cur‑vature turning conditions,a longitudinal and lateral comprehensive trajectory tracking control method based on non‑linear model predictive control(NMPC)is proposed in this paper.Through the effective combination of NMPC and barrier(function)method(BM),the tracking accuracy and driving stability are improved.Firstly,a dynamics mod‑el for a four‑wheel drive and front wheel steering vehicle and its trajectory tracking model are established and the NMPC is adopted to calculate the desired longitudinal force,lateral force and yaw moment.Then a nonlinear pro‑gramming mathematical model with constraints is constructed based on tire dynamics model and the BM is used to solve out the optimal distribution of the tire forces of four‑wheels,and finally the longitudinal and lateral comprehen‑sive trajectory tracking control for a four‑wheel drive intelligent vehicle is achieved.In the end,a Carsim and Simu‑link joint simulation is conducted with a result showing that compared with the traditional preview PID control,the method proposed can significantly improve the tracking accuracy and driving stability with consideration of the cou‑pling between longitudinal and lateral dynamics characteristics.Keywords:intelligent vehicles;trajectory tracking;nonlinear model predictive control;barrier method*国家重点研发计划(2018YFB0105000,2017YFB0102603)、国家自然科学基金(51875255,61601203,61773184,U1564201,U1664258,U1764257,U1762264)、江苏省自然科学基金(BK20180100)、江苏省六大人才高峰项目(2018‑TD‑GDZB‑022)、江苏省战略性新兴产业发展重大专项(苏发改高技发(2016)1094号)和镇江市重点研发计划(GY2017006)资助。
考虑车辆运动约束的最优避障轨迹规划算法
2021年(第43卷)第4期汽车工程Automotive Engineering2021(Vol.43)No.4 doi:10.19562/j.chinasae.qcgc.2021.04.014考虑车辆运动约束的最优避障轨迹规划算法*杨彬,宋学伟,高振海(吉林大学,汽车仿真与控制国家重点实验室,长春130022)[摘要]无人驾驶车辆进行障碍物规避时,须考虑车辆的运动特性以保证避障过程的安全性、舒适性、操纵稳定性等。
本文中提出了一种在车辆运动约束下的避障轨迹规划算法。
该算法结合障碍物的运动状态和位姿信息,在局部环境地图中对超越障碍物的期望位置进行局部采样组成离散终端状态点集,将复杂道路环境中的避障轨迹搜索问题转换为自车与状态点集之间的轨迹拟合和寻优问题。
轨迹的拟合通过基于车辆侧向动力学模型的Bézier 曲线规划器实现,而寻优过程则考虑到了车辆进行轨迹跟随过程中的行驶平顺性和操纵稳定性。
通过与常规State Lattice算法和MPC算法在多种测试环境中进行避障效果的对比,结果表明本文中提出的规划方法在测试场景中能够使车辆安全、合理地规避障碍,同时在轨迹平顺性、操纵稳定性等方面有较好的表现。
关键词:车辆侧向动力学模型;离散终端状态点集;Bézier曲线;避障轨迹规划Optimal Obstacle Avoidance Trajectory Planning Algorithm ConsideringVehicle Motion ConstraintsYang Bin,Song Xuewei&Gao ZhenhaiJilin University,State Key Laboratory of Automobile Simulation and Control,Changchun130022[Abstract]The motion characteristics of the autonomous vehicle should be taken into account to ensure safety,comfort and stability when avoiding obstacles.An obstacle avoidance trajectory planning algorithm with the constraints of vehicle motion is proposed in this paper.Firstly,combining with the motion state and position informa⁃tion of obstacles,the algorithm derives the derivative status region where the vehicle can safely avoid obstacles from the local environment map.Then,the terminal state points are sampled in the derivative status region to form a dis⁃crete terminal state point set.The obstacle avoidance trajectory search problem in complex road environment is trans⁃formed into the problem of trajectory fitting and optimization between the vehicle and the state point set.Trajectory fitting is realized by Bézier curve planner based on vehicle lateral dynamics model while the optimization process takes into consideration of driving smoothness and operation stability in the process of vehicle trajectory following. By comparing the obstacle avoidance effect in multiple scenarios with the conventional State Lattice algorithm and MPC algorithm,the results show that the proposed algorithm can make the vehicle avoid obstacles safely and reason⁃ably in the test scenarios,and has better performance in the aspects of trajectory smoothness and vehicle handling stability.Keywords:vehicle lateral dynamic model;discrete terminal state points set;Bézier curve;obstacle avoidance planning*国家自然科学基金(U1564214、51775236)和国家重点研发计划(2017YFB0102600)资助。
基于车辆动力学混合模型的智能汽车轨迹跟踪控制方法

基于车辆动力学混合模型的智能汽车轨迹跟踪控制方法方培俊;蔡英凤;陈龙;廉玉波;王海;钟益林;孙晓强【期刊名称】《汽车工程》【年(卷),期】2022(44)10【摘要】基于机理分析的车辆动力学建模过程通常进行简化及假设,无法准确计算实际车辆在不同道路条件下的动力学变化,进而导致智能汽车轨迹跟踪控制精度低、不稳定等问题。
鉴于此,本文中提出了一种基于混合建模技术的非线性建模与控制方法,构建机理分析-数据驱动的车辆动力学串联混合模型,车辆状态与控制数据经机理模型实现计算处理,级联合并后作为数据驱动模块的输入,长短时记忆网络作为主干网络实现时序数据的非线性关联特征提取和最终的模型输出计算。
测试结果表明,该模型可以补充计算机理模型中的部分未建模动态并提高模型计算精度,且具有隐式理解不同路面附着条件的能力。
其次,使用Euler积分完成对预测模型的离散化并设计模型预测控制轨迹跟踪算法,设计前馈反馈控制算法在实现车辆的纵向控制的同时提供横向控制中预测模型所需的外部输入,最终实现更符合实际行驶环境且更精准的轨迹跟踪控制效果。
CarSim/Simulink联合仿真结果表明,该方法实现了不同道路附着系数下控制量精确输出,同步提升了智能汽车轨迹跟踪控制精度和稳定性,具有良好的横纵向协调控制效果。
【总页数】16页(P1469-1483)【作者】方培俊;蔡英凤;陈龙;廉玉波;王海;钟益林;孙晓强【作者单位】江苏大学汽车工程研究院;比亚迪汽车工业有限公司;江苏大学汽车与交通工程学院【正文语种】中文【中图分类】TP3【相关文献】1.基于跟踪误差模型的智能车辆轨迹跟踪方法2.基于模型预测控制的智能汽车轨迹跟踪方法比较3.基于模型预测和遗传算法的智能车辆轨迹跟踪控制4.基于模型预测控制的智能车辆轨迹跟踪研究5.智能车辆横向轨迹跟踪的显式模型预测控制方法因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
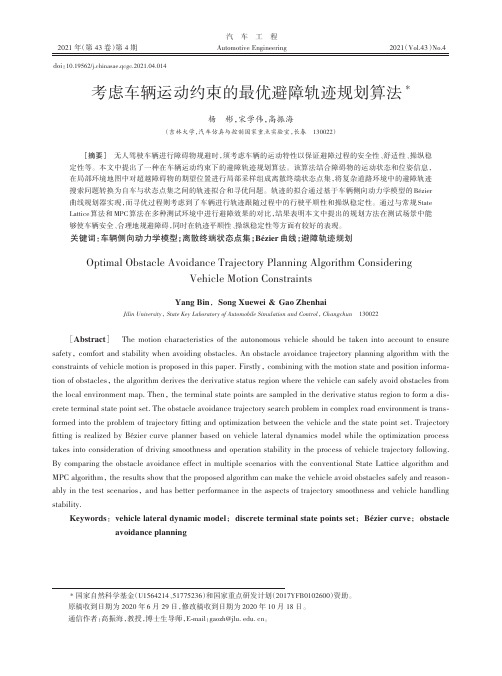
基于此假设进行交通车轨迹预估, 如图 3 所 示, 以主车规划时刻质心为坐标原点, 主车行驶方 向为 x 轴的笛卡尔坐标系下, 进行交通车轨迹预 估。 交通车的轨迹估算基于简单的物体运动模型
图2 Fig. 2
轨迹规划模块 Fig. 3
图3
交通车轨迹预估示意图
Trajectory planning block
态轨迹规划算法。该算法在交通车轨迹预估基础上建立搜索空间, 利用车辆稳态动力学模型作为轨迹发生 器, 在搜索空间中对轨迹发生器产生的轨迹进行评价, 根据驾驶意图和优化条件选择最优轨迹 。采用基于最 优加速度预瞄理论的轨迹跟踪算法, 建立了七自由度车辆动力学模型, 并在 Simulink 环境下搭建仿真平台, 进 行超车仿真实验。实验结果表明该算法可行 、 有效。 关键词: 驾驶辅助系统; 动态轨迹规划; 车辆动力学; 轨迹决策; 轨迹跟踪 中图分类号: U461. 99 文献标志码: A 文章编号: 1001 - 2486 ( 2013 ) 06 - 0171 - 06
汽车轨迹规划技术是实现汽车智能辅助系统 的关键技术之一, 具有重要的研究价值和意义。 汽车轨迹规划的目的是找到一条从初始点到目标 [1 ] 点的安全轨迹, 并满足所有约束条件 。 从轨迹 规划的角度来看, 汽车属于轮式机器人的一种, 因 此机器人领域的轨迹规划方法具有一定的借鉴意 义。但是, 与移动机器人相比, 汽车轨迹规划问题 具有很多不同。 第一, 汽车行车环境的主要参与 物是车辆, 速度较高, 所以汽车轨迹规划是在高动 态环境下的动态规划, 并且每个规划周期的终点 状态无法预知。 第二, 汽车行车环境多为结构化 环境, 车道线与道路边界线均为汽车轨迹规划的 。 约 束 第 三,汽 车 转 向 几 何 关 系 必 须 满 足 Ackerman 转向约束, 使得汽车本身为非完整约束 系统, 且由于汽车速度较高, 车辆动力学特性对轨 迹规划产生的影响也不可忽视。 第四, 汽车作为 交通参与物的组成部分, 规划轨迹必须满足交通 法规的要求。
· 172·
国防科技大学学报
第 35 卷
1
整体方案描述
2
2. 1
车辆动态轨迹规划
交通车轨迹预估以及搜索空间建立
设 本文介绍的轨迹规划方法采用“模块化 ” 计思想, 根据功能进行模块划分和设计, 如图 1 所 。“汽车行驶环境模块 ” 示 包含道路信息, 如车道 ; “交通车辆模块 ” 宽度、 车道数目、 路面附着系统 ; “轨迹规划模块 ” 预估交通车状态 在每次规划周 期开始时获得当前时刻下的主车以及相关交通信 ; “轨迹跟随控制模块 ” 息并进行轨迹规划 接受规 划轨迹并产生方向盘转角、 油门开度、 制动踏板角 ; “车辆动力学模块 ” 度等控制信号 接受到控制信 号后产生相应的响应, 即实际轨迹; 主车状态在规 划周期开始时实时更新。
( 4) Y t = Y0 ± u
同理, 可以将所有感兴趣交通车未来任意时 刻的位置投影到该坐标系下, 如图 4 , 所有预估轨 “时间”与 “空间 ”信息的主 迹共同组成同时包含 车轨迹规划搜索空间。 通过这样的方式, 在一个规 划周期内, 将动态环境的时间变量转化为静态环 境的空间变量。
L( 1 + Ku ) uδ 1 - sin t uδ L( 1 + Ku2 ) uδ t L( 1 + Ku2 )
对汽车行驶交通环境中交通参与物位置和运 动状态的估计是进行汽车轨迹规划的前提 , 也是 保障汽车安全行驶的关键。交通车的动力学可用 下式表达: = f( x( t) , x u( t) ) ( 1) u 为交通车的连续输入, 上式中 x 是状态变量, 所 以在 t = r 时刻下, 车辆状态为 x( r) = x( 0 ) + u( τ) ) dτ ∫ f( x( τ) ,
0 r
( 2)
虽然通过适当传感可以获取交通车当前时刻 u( t) ) 也 且状态方程 f( x( t) , 的初始状态值 x( 0 ) , 可通过经验获得, 但状态方程的输入 u( t) ∈ U( U 所以未来的行驶轨 为外界输入集合 ) 无法确定, 迹并不确定, 因此估算交通车的行驶轨迹只有概 率和统计上的意义。 然而在实际情况下, 大多数车 在大多数时候遵循基本的交通行驶模式 , 因此本 文中合理地假定交通车保持当前状态 ( 速度和方 向) 不变, 并在此前提下对其未来轨迹进行估算 , 如式( 3 ) 。 很显然轨迹估算的周期越短, 该假设也
Illustration of traffic vehicle trajectory prediction
第6 期
等: 基于车辆稳态动力学特性的汽车动态轨迹规划 孙浩,
· 173·
获得。 首先, 通过“采样 ”将不同时刻交通车的位 置投影到道路网格中。 则未来任意时刻交通车在 该坐标系下的坐标均可以由式 ( 4 ) 确定。 式 ( 4) 得出该交通车在未来任意时刻所占据的空间 位置。
图4 Fig. 4
安全轨迹示意图
最小二乘辨识方法获得。 k2 ) = v err ( k1 , k2 ) = ω err ( k1 , k1 , k2 ) δ, ∑ ( f( u, k1 , k2 ) δ, ∑ ( g( u, - f carsim )
2
Illustration of safe trajectory
第 35 卷 第 6 期 2013 年 12 月
国 防 科 技 大 学 学 报 JOURNAL OF NATIONAL UNIVERSITY OF DEFENSE TECHNOLOGY
Vol. 35 No. 6 Dec. 2013
基于车辆稳态动力学特性的汽车动态轨迹规划 *
孙 浩, 张素民
( 吉林大学 汽车仿真与控制国家重点实验室, 吉林 长春 130022 ) 摘 要: 针对高动态环境下驾驶辅助系统( ADAS ) 的轨迹规划问题, 提出基于车辆稳态动力学特性的动
Dynamic trajectory planning based on vehicle steady dynamics
SUN Hao ,ZHANG Sumin
( State Key Laboratory of Automobile Simulation and Control ,Jilin University,Changchun 130022 , China) Abstract: A dynamic trajectory planning algorithm based on vehicle steadystate dynamics for driver assistance systems ( ADAS ) under high dynamic environment is proposed. The algorithm built a 'search space'on the basis of traffic vehicle trajectory prediction and used the vehicle steadystate kinetic model as a trajectory generator. Every trajectory produced by the generator was evaluated in the search space and the optimal trajectory under optimal conditions was selected. In order to realize the closedloop dynamic simulation ,the corresponded trajectory tracking algorithms and vehicle dynamics model were also proposed. A simulation platform under Simulink environment was built for simulation tests. The results show that in the intelligent overtaking test case,the proposed algorithm is able to overtake safely and to meet the needs of intelligent assistance systems. Key words: ADAS; dynamic trajectory planning; vehicle dynamics; trajectory decision making; trajectory tracking
若任意时刻、 任意交通车, 对于规划轨迹 L, 均有 HL ( ti ) ∩ Tj ( ti ) = O ( 5)
R =
u ωr
( 8)
Y0 , 若车辆初始位置为 X0 , θ0 , 那么在 t 时刻 后, 车辆的状态可以解析地表达为: X t = X0 + u L( 1 + Ku2 ) uδ cos t uδ L( 1 + Ku2 )
2
{y
x ti = x t0 + v tx × t i
ti
(
)
( 9)
= y t0 + v ty × t i
收稿日期: 2013 - 04 - 02 基金项目: 国家自然基金资助项目( 51175215 ) Email: sunhao0913@ gmail. com; 作者简介: 孙浩( 1988 —) , 男, 山东聊城人, 博士研究生, Email: suminzhang@ 163. com 张素民( 通信作者) , 男, 讲师, 博士,
{
[
]}
( 10 ) θ t = θ0 ± ( 11 )
该解析表达式表达的是汽车在给定速度下, 对应于不同的转角输入其运动学的响应 , 可以较 为准确地反映车辆的运动轨迹, 而且数值计算效 率高、 实时性好。 2. 2. 2 模型参数识别 k2 , 稳态动力学模型存在参数 k1 、 在实车以及 k2 不仅仅是前轮、 k1 、 后轮的 主流动力学模型中, 侧偏刚度, 通常无法直接给出, 需要经过参数识别 得出。 本文利用 Carsim 稳态转向实验数据, 通过