IO口模拟SPI口
使用MCU的GPIO模拟SPI
使用MCU的GPIO模拟SPI在树莓派等单片机(MCU)上,可以使用GPIO模拟SPI(串行外设接口)来与其他设备进行通信。
SPI是一种同步串行数据传输协议,通常用于连接MCU和传感器、显示器、存储器等外设。
以下是使用MCU的GPIO模拟SPI的详细步骤。
1.了解SPI的基本原理:SPI使用四根信号线进行通信,包括时钟(SCLK)、主机输出从机输入(MOSI)、主机输入从机输出(MISO)和片选(SS)。
-SCLK:时钟信号,由主机产生,用于同步数据传输。
-MOSI:主机输出从机输入,主机将数据发送到从机。
-MISO:主机输入从机输出,从机将数据发送到主机。
-SS:片选信号,用于选择从机。
2.确定所需GPIO引脚:根据所连接的设备的要求,选择合适的GPIO引脚作为SCLK、MOSI、MISO和SS。
3. 配置GPIO引脚:在MCU上,使用相应的编程语言和库函数来配置GPIO引脚。
例如,在树莓派上使用Python编程,可以使用RPi.GPIO库进行配置。
4.编写SPI传输函数:编写一个函数来模拟SPI传输。
该函数应包括以下步骤:a.设置SS为低电平,选中从机设备。
b.发送数据比特串:逐位发送MOSI数据,同时接收并保存MISO数据。
c.设置SS为高电平,取消从机设备的选中。
假设我们要发送8位数据,可以使用以下Python代码实现SPI传输函数:```pythonimport RPi.GPIO as GPIOdef spi_transfer(data):GPIO.output(SS, GPIO.LOW) # 选中从机received_data = 0for bit in range(7, -1, -1): # 逐位传输数据#发送MOSI数据GPIO.output(MOSI, (data >> bit) & 0x01)#接收并保存MISO数据received_bit = GPIO.input(MISO)received_data = (received_data << 1) , received_bit#在SCLK上升沿发送和接收数据GPIO.output(SCLK, GPIO.HIGH)GPIO.output(SCLK, GPIO.LOW)GPIO.output(SS, GPIO.HIGH) # 取消从机选中return received_data```5. 通过调用SPI传输函数与从机通信:在应用程序中,根据需要调用SPI传输函数。
SPI、I2C、UART三种串行总线的原理、区别及应用
简单描述:SPI 和I2C这两种通信方式都是短距离的,芯片和芯片之间或者其他元器件如传感器和芯片之间的通信。
SPI和IIC是板上通信,IIC有时也会做板间通信,不过距离甚短,不过超过一米,例如一些触摸屏,手机液晶屏那些很薄膜排线很多用IIC,I2C能用于替代标准的并行总线,能连接的各种集成电路和功能模块。
I2C 是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。
总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。
多路微控制器能在同一个I2C总线上共存这两种线属于低速传输;而UART是应用于两个设备之间的通信,如用单片机做好的设备和计算机的通信。
这样的通信可以做长距离的。
UART和,UART就是我们指的串口,速度比上面三者快,最高达100K左右,用与计算机与设备或者计算机和计算之间通信,但有效范围不会很长,约10米左右,UART优点是支持面广,程序设计结构很简单,随着USB的发展,UART也逐渐走向下坡;SmBus有点类似于USB设备跟计算机那样的短距离通信。
简单的狭义的说SPI和I2C是做在电路板上的。
而UART和SMBUS是在机器外面连接两个机器的。
详细描述:1、UART(TX,RX)就是两线,一根发送一根接收,可以全双工通信,线数也比较少。
数据是异步传输的,对双方的时序要求比较严格,通信速度也不是很快。
在多机通信上面用的最多。
2、SPI(CLK,I/O,O,CS)接口和上面UART相比,多了一条同步时钟线,上面UART 的缺点也就是它的优点了,对通信双方的时序要求不严格不同设备之间可以很容易结合,而且通信速度非常快。
一般用在产品内部元件之间的高速数据通信上面,如大容量存储器等。
3、I2C(SCL,SDA)接口也是两线接口,它是两根线之间通过复杂的逻辑关系传输数据的,通信速度不高,程序写起来也比较复杂。
一般单片机系统里主要用来和24C02等小容易存储器连接。
运用4个普通IO口模拟SPI程序等
运用 4 个普通 I/O 口模拟 SPI 程序源代码
/******************************************************************** 函 数 名:uchar SpiReadWrite(uchar dat) 功 能:SPI 发送接收一个数据 说 明: 调 用: 入口参数: 出口参数: ***********************************************************************/ uchar SpiReadWrite(uchar dat) { uchar i,temp; temp=0; SCK=0; _nop_(); for(i=0;i<8;i++) { if(dat & 0x80) { MOSI=1; }
单片机IO口介绍

单片机IO口介绍单片机(microcontroller)是一种集成电路芯片,具有运算、存储和控制功能。
它是嵌入式系统中最常用的处理器之一、在单片机中,IO (Input/Output)口是用来进行输入输出操作的接口。
IO口通常包括数字IO口和模拟IO口两种类型。
下面将详细介绍单片机IO口的功能和应用。
1.数字IO口:数字IO口是单片机与外部设备进行数字信号交换的接口。
数字IO口可以进行输入和输出操作,具有以下特点:-输入功能:可以通过读取外部设备的状态或信号,并将其转换为数字信号输入到单片机中进行处理。
例如,传感器的信号输入和按键的输入等。
-输出功能:可以通过将数字信号输出到外部设备,控制其工作状态。
例如,LED的控制、驱动电机或继电器等。
数字IO口通常以引脚(pin)的形式存在于单片机芯片上。
一个引脚包括输入端和输出端,可以根据需要进行配置。
数字IO口操作简单、速度快、精度高,常用于控制和通信等方面。
2.模拟IO口:模拟IO口是单片机与外部设备进行模拟信号交换的接口。
模拟IO口可以进行模拟输入和输出操作,常用于采集和控制模拟信号。
-模拟输入功能:可以从外部信号源中获取模拟信号,并将其转换为数字信号输入到单片机中进行处理。
例如,温度传感器、声音传感器等。
-模拟输出功能:可以将数字信号转换为模拟电压、电流等形式,输出到外部设备中。
例如,通过PWM(脉冲宽度调制)信号控制电机的转速。
模拟IO口通常通过ADC(模数转换器)和DAC(数模转换器)实现。
ADC将模拟信号转换为数字信号,DAC将数字信号转换为模拟信号。
模拟IO口的使用相对复杂,需要进行模数转换和数模转换,但在一些需要对模拟信号进行处理和控制的应用中起到关键作用。
3.应用场景:IO口在单片机系统中广泛应用于各种应用场景。
以下是一些常见的应用场景:-传感器接口:通过IO口连接传感器,读取传感器的输出信号,进行数据采集和处理。
例如温度、湿度、光照等传感器的接口。
单片机IO口模拟SPI四种模式的程序
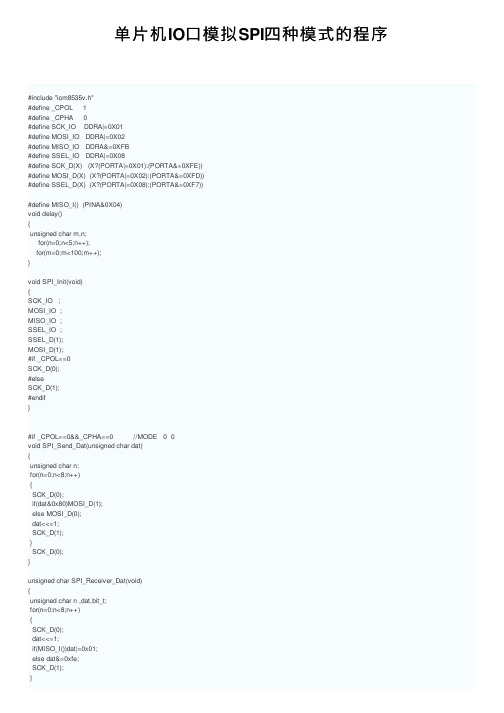
单⽚机IO⼝模拟SPI四种模式的程序#include "iom8535v.h"#define _CPOL 1#define _CPHA 0#define SCK_IO DDRA|=0X01#define MOSI_IO DDRA|=0X02#define MISO_IO DDRA&=0XFB#define SSEL_IO DDRA|=0X08#define SCK_D(X) (X?(PORTA|=0X01):(PORTA&=0XFE))#define MOSI_D(X) (X?(PORTA|=0X02):(PORTA&=0XFD))#define SSEL_D(X) (X?(PORTA|=0X08):(PORTA&=0XF7))#define MISO_I() (PINA&0X04)void delay(){unsigned char m,n;for(n=0;n<5;n++);for(m=0;m<100;m++);}void SPI_Init(void){SCK_IO ;MOSI_IO ;MISO_IO ;SSEL_IO ;SSEL_D(1);MOSI_D(1);#if _CPOL==0SCK_D(0);#elseSCK_D(1);#endif}#if _CPOL==0&&_CPHA==0 //MODE 0 0void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}SCK_D(0);}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(0);return dat;}#endif#if _CPOL==1&&_CPHA==0 //MODE 1 0 void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}SCK_D(1);}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(1);return dat;}#endif#if _CPOL==0&&_CPHA==1 //MODE 0 1 void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(0);for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(0);return dat;}#endif//////////////////////////////////////////////////////////////////////////////////////////////////////////////#if _CPOL==1&&_CPHA==1 //MODE 1 1 void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(1);for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}}unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;SCK_D(0);for(n=0;n<8;n++){ SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(1);return dat;}#endifvoid main(){SPI_Init();DDRB = 0XFF;//#if _CPOL//SCK_D(0);//#endifwhile(1){//SSEL_D(0);//SPI_Send_Dat(0x01);//SPI_Send_Dat(0x31);//SSEL_D(1);SSEL_D(0);SPI_Send_Dat(0x81);PORTB =SPI_Receiver_Dat();SSEL_D(1);//delay();}}。
SPI、I2C、UART三种串行总线协议的区别和SPI接口介绍(转)

SPI、I2C、UART三种串⾏总线协议的区别和SPI接⼝介绍(转)SPI、I2C、UART三种串⾏总线协议的区别第⼀个区别当然是名字:SPI(Serial Peripheral Interface:串⾏外设接⼝);I2C(INTER IC BUS)UART(Universal Asynchronous Receiver Transmitter:通⽤异步收发器)第⼆,区别在电⽓信号线上:SPI总线由三条信号线组成:串⾏时钟(SCLK)、串⾏数据输出(SDO)、串⾏数据输⼊(SDI)。
SPI总线可以实现多个SPI设备互相连接。
提供SPI串⾏时钟的SPI设备为SPI主机或主设备(Master),其他设备为SPI从机或从设备(Slave)。
主从设备间可以实现全双⼯通信,当有多个从设备时,还可以增加⼀条从设备选择线。
如果⽤通⽤IO⼝模拟SPI总线,必须要有⼀个输出⼝(SDO),⼀个输⼊⼝(SDI),另⼀个⼝则视实现的设备类型⽽定,如果要实现主从设备,则需输⼊输出⼝,若只实现主设备,则需输出⼝即可,若只实现从设备,则只需输⼊⼝即可。
I2C总线是双向、两线(SCL、SDA)、串⾏、多主控(multi-master)接⼝标准,具有总线仲裁机制,⾮常适合在器件之间进⾏近距离、⾮经常性的数据通信。
在它的协议体系中,传输数据时都会带上⽬的设备的设备地址,因此可以实现设备组⽹。
如果⽤通⽤IO⼝模拟I2C总线,并实现双向传输,则需⼀个输⼊输出⼝(SDA),另外还需⼀个输出⼝(SCL)。
(注:I2C资料了解得⽐较少,这⾥的描述可能很不完备)UART总线是异步串⼝,因此⼀般⽐前两种同步串⼝的结构要复杂很多,⼀般由波特率产⽣器(产⽣的波特率等于传输波特率的16倍)、UART接收器、UART发送器组成,硬件上由两根线,⼀根⽤于发送,⼀根⽤于接收。
显然,如果⽤通⽤IO⼝模拟UART总线,则需⼀个输⼊⼝,⼀个输出⼝。
第三,从第⼆点明显可以看出,SPI和UART可以实现全双⼯,但I2C不⾏;第四,看看⽜⼈们的意见吧!wudanyu:I2C线更少,我觉得⽐UART、SPI更为强⼤,但是技术上也更加⿇烦些,因为I2C需要有双向IO的⽀持,⽽且使⽤上拉电阻,我觉得抗⼲扰能⼒较弱,⼀般⽤于同⼀板卡上芯⽚之间的通信,较少⽤于远距离通信。
IO口模拟SPI主从机例程
IO口模拟spi主从机通讯例程下面这两幅图是,关于SPI数据读取或发送的时序图。
1、主机io口模拟spi通讯例程//**spi io 口初始化**//void SPI_init(void){gpio_configure_fpin(SPI_MISO, IO_TYPE_INPUT);//配置成输入模式gpio_configure_fpin(SPI_MOSI, IO_OUTPUT_1);//配置成输出模式gpio_configure_fpin(SPI_SCK, IO_OUTPUT_1); //配置成输出模式gpio_configure_fpin(SPI_CS, IO_OUTPUT_1); //配置成输出模式clr_spi_GPIO(SPI_SCK);//拉低SPI_SCKset_spi_GPIO(SPI_CS);//拉高SPI_SCKclr_spi_GPIO(SPI_MOSI);//拉低SPI_MOSI}//**主机spi读取一字节api**//unsigned char SPI_ReadByte(void){unsigned char i,rByte=0;clr_spi_GPIO(SPI_CS);for(i=0;i<8;i++){clr_spi_GPIO(SPI_SCK);//clr_spi_sck;delay_us(3);rByte<<=1;if(MISO_is_status())////M16 MISO---PB6rByte|=1;set_spi_GPIO(SPI_SCK);//set_spi_sck;delay_us(3);}clr_spi_GPIO(SPI_SCK);set_spi_GPIO(SPI_CS);return rByte;}//** 读取miso 的电平**//char MISO_is_status(void){if(red_spi_GPIO(SPI_MISO))//return 1;elsereturn 0;}//**主机spi写入一字节api**//void SPI_WriteByte(unsigned char wByte){unsigned char i;clr_spi_GPIO(SPI_CS);for(i=0;i<8;i++){clr_spi_GPIO(SPI_SCK);//delay_us(3);//if(wByte&0x80){set_spi_GPIO(SPI_MOSI);//}else{clr_spi_GPIO(SPI_MOSI);//}wByte=wByte<<1;set_spi_GPIO(SPI_SCK);//set_spi_sck;delay_us(3);//}clr_spi_GPIO(SPI_SCK);set_spi_GPIO(SPI_CS);}////////////////////////////////////////////////////////////////////////////////////注意,我写的主从机的io口对接如下主机io 从机ioSPI_MISO ------------------------- SPI_MISOSPI_MOSI --------------------------- SPI_MOSISPI_SCK --------------------------- SPI_SCKSPI_CS -------------------------- SPI_CS可能有的人对上面的io口对接的方式感到奇怪,请仔细看我对这几个io口做的初始化设置就可以明白。
I2C,SPI,UART和CAN的区别
I2C,SPI,UART和CAN的区别(转)SPI--Serial Peripheral Interface,(Serial Peripheral Interface:串行外设接口)串行外围设备接口,是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
I2C--INTER-IC(INTER IC BUS:意为IC之间总线)串行总线的缩写,是PHILIPS公司推出的芯片间串行传输总线。
它以1根串行数据线(SDA)和1根串行时钟线(SCL)实现了双工的同步数据传输。
具有接口线少,控制方式简化,器件封装形式小,通信速率较高等优点。
在主从通信中,可以有多个I2C总线器件同时接到I2C总线上,通过地址来识别通信对象。
能用于替代标准的并行总线,能连接的各种集成电路和功能模块。
I2C是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。
总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。
多路微控制器能在同一个I2C总线上共存。
最主要的优点是其简单性和有效性。
它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
UART(Universal Asynchronous Receiver Transmitter:通用异步收发器):单端,远距离传输。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信的概念非常简单,串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
I2C,SPI,UART和CAN的区别
I2C,SPI,UART和CAN的区别(转)SPI--Serial Peripheral Interface,(Serial Peripheral Interface:串行外设接口)串行外围设备接口,是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
I2C--INTER-IC(INTER IC BUS:意为IC之间总线)串行总线的缩写,是PHILIPS公司推出的芯片间串行传输总线。
它以1根串行数据线(SDA)和1根串行时钟线(SCL)实现了双工的同步数据传输。
具有接口线少,控制方式简化,器件封装形式小,通信速率较高等优点。
在主从通信中,可以有多个I2C总线器件同时接到I2C总线上,通过地址来识别通信对象。
能用于替代标准的并行总线,能连接的各种集成电路和功能模块。
I2C是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。
总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。
多路微控制器能在同一个I2C总线上共存。
最主要的优点是其简单性和有效性。
它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
UART(Universal Asynchronous Receiver Transmitter:通用异步收发器):单端,远距离传输。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信的概念非常简单,串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
STM32之IO口模拟SPI
STM32之IO⼝模拟SPI本⽂介绍如何使⽤STM32标准外设库的GPIO端⼝模拟SPI,本例程使⽤PA5、PA6和PA7模拟⼀路SPI。
SPI有4种⼯作模式,模拟SPI使⽤模式0,即空闲时SCK为低电平,在奇数边沿采样。
本⽂适合对单⽚机及C语⾔有⼀定基础的开发⼈员阅读,MCU使⽤STM32F103VE系列。
1. 简介SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串⾏外围设备接⼝,是⼀种⾼速全双⼯的通信总线。
它被⼴泛地使⽤在要求通讯速率较⾼的场合。
SPI⽤于多设备之间通讯,分为主机Master和从机Slave,主机只有⼀个,从机可以有多个,通过⽚选信号对从机进⾏选择,⼀次只能选择⼀个从机。
通讯只能由主机发起,⽀持的操作分为读取和写⼊,即主机读取从机的数据,以及向从机写⼊数据。
SPI⼀般有4根线,分别是⽚选线SS、时钟线SCK、主设备输出\从设备输⼊MOSI、主设备输⼊\从设备输出MISO,其中除MISO对于主机为输⼊引脚外,其他引脚对于主机均为输出引脚。
因为有独⽴的输⼊和输出引脚,因此SPI⽀持全双⼯⼯作模式,即可以同时接收和发送。
2. 总线传输信号空闲状态:⽚选信号SS低电平有效,那么空闲状态⽚选信号SS为⾼。
开始信号及结束信号:开始信号需要将⽚选信号SS拉低,结束信号需要将⽚选信号SS拉⾼。
通讯模式:SPI有4种通讯模式,分别为0、1、2、3,根据时钟极性和时钟相位确定,时钟极性分别为空闲低电平和空闲⾼电平,时钟相位分别为SCK奇数边沿采样和偶数边沿采样。
常⽤的模式为模式0和模式3。
SPI模式时钟极性(空闲时SCK时钟)时钟相位(采样时刻)0低电平奇数边沿1低电平偶数边沿2⾼电平奇数边沿3⾼电平偶数边沿3. 时序说明以模式0举例说明:空闲状态:⽚选信号SS为⾼,SCK输出低电平。
开始信号:⽚选信号SS变低,SCK输出低电平。
结束信号:⽚选信号SS变⾼,SCK输出低电平。