无约束优化方法程序
(05)第四章-无约束优化方法(梯度法-牛顿法和变尺度法)
第四章
第四章
无约束优化问题标准形式:
无约束优化问题标准形式:
§
§
§
§
§
§
图最速下降法的收敛过程
αα
2
2
例4-1 求目标函数
取初始点
[2,2]
=
x
例4-2 求目标函数解取初始点[2,2]
=x
算出一维搜索最佳步长
§
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
梯度法的特点
x
给定0,ε
一般迭代式:
§4.3
§4.3
§4.3
§4.3
α0
d 0
x
x 1
x*
1
α1d 1
1()
f −∇x d 1
4-4 共轭方向法
假设目标函数f (x ) 在极值点附近的二次近似函数为
沿某个下降方向
如果能够选定这样的搜索方向,那么对于二
α
0d0
x0x1x*
1
α
1
d1
1
()
f
−∇x d
1。
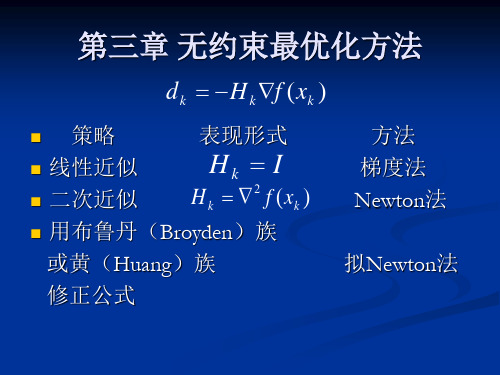
第三章 无约束最优化方法

f x f x
*
所以函数f(x)在 x * 处取得局部极小值,称x *为
局部极小点。 而优化问题一般是要求目标函数在某一区域内 的全局极小点。 函数的局部极小点是不是一定是全局极小点呢?
5
第三章 无约束最优化方法
下凸的一元函数
可以证明凸规划问题的局部最小点就是其全局最小点。
6
第三章 无约束最优化方法
f x 0
x Rn
的问题。一般地,这是一个非线性方程组, 17 可对其采用迭代法求解之。
第三章 无约束最优化方法
下降迭代算法
算法:给定目标函数 f x 的极小点的一个初始估计点 x0 , 然后按一定的规则产生一个序列 xk ,这种规则通常称 为算法。如果这个序列的极限恰好是问题(3-1)的极 小点 x* ,即
正定矩阵 设 Q是n×n 阶对称矩阵。
若 x Rn 且 x 0 都有 x T Q x 0 ,则称矩阵Q 是正定的 若 x R
n n
T x 都有 Q x 0 ,则称矩阵Q 是半正定的
若 x R 且 x 0 都有 xT Q x 0 ,则称矩阵Q 是负定的 若 x Rn 都有 x T Q x 0 ,则称矩阵Q 是半负定的
为正定的定义是:若对任何向量d (d!=0),有
d T 2 f x* d 0
对称正定方阵 2 f x* 的检验方法是所有主子式均大于零。 二、迭代方法 求解 无约束最优化问题 T f x min x x1, x2 , , xn 的问题可以转变为求解n 元方程组
26
3-2
一维搜索(0.618法)
设给定一个较小的步长δ,从α=0开始,先计算φ(0),然 后计算在 (1.618)0 的函数值φ(δ);如果φ(δ)<φ(0), 则讲步长δ增大1.618倍,得到一个新点 1.618 2.618 , 计算φ(2.618δ);如果φ(2.618δ)仍小于φ(δ),再继续增加 步长为原步长的1.618倍,如下图所示,从而得到一系列 j 点的αj的值为 '
实验二 无约束最优化
实验二、 无约束最优化【实验目的】1.了解无约束最优化方法的一些基本概念。
2.熟悉掌握用相关的命令来求解无约束最优化问题。
【实验内容】把题目和相应的完整命令写在实验报告上。
1:无约束最优化问题实际上是什么问题?求这类问题的最优解的基本思路是什么?2:求()5x f x e x =-在区间[1,2]内的极小值点和极小值。
3:已知22212312123(,,)3sin f x x x x x x x x =+-。
(1) 求123(,,)f x x x 在点(1,1,0)-附近的极小值;(2) 求123(,,)f x x x 在点(1,1,0)-附近的极小值点和极小值,要求优化算法用高斯-牛顿法,搜索方向用拟牛顿法的DFP 公式。
【相关知识说明】无约束最优化是指在没有约束条件下,求多变量实值函数极值。
无约束最优化问题的数学表达式为12min (),(,,,)n n f x x x x x R =∈。
一般f 为非线性函数,x 是n 维实变量,实际上这是一个多元函数无条件极值问题。
由于求极大值问题,可以用添加负号的方式转化为求极小值问题,因此通常只讨论求极小值问题。
应该注意的是,极值问题的解,即极值点,都是局部最优解,全局最优解只能从局部最优解的比较中得到。
如何求解无约束最优化问题的最优解呢?一般是采用迭代法,即先选择一个初始点,再寻找该点处的下降方向(我们称为搜索方向),在该方向上求极小点,得到一个新的点,然后在新点处再寻找下降方向和在该方向上的求极小点,……,如此下去,最终得到最优解。
我们先来看求一元函数y=f(x)在[x1,x2]内的极小值的命令:说明:其中'fun'是函数f(x)的表达式,当然也可以是关于f(x)的函数M-文件名。
返回值x 是极小值点。
现在我们来回答问题1。
问题1:求()2sin x f x e x -=在区间[0,6]内的极小值点和极小值.命令如下f='2*exp(-x)*sin(x)';x=fminbnd(f,0,6) %极小值点fval=2*exp(-x)*sin(x) %对应x 的极小值大家得到的结果是什么呢?这些是一元函数求极值,那么怎么求多元函数的极值呢?可以用下面的最简形式的命令:如果还必须满足更苛刻的要求,可以用下面的命令说明:(1) 返回值中,x 是极小值点。
第3章 无约束最优化方法 3-1 最速下降法 3-2 牛顿法
1
u f ( x)u m u
T 2
2
u R
n
则从任意的初始点 x 0 出发,阻尼牛顿法产 生的迭代点列 满足: (1)当 x k 为有穷点列时,其最后一个点 为 f ( x) 的唯一极小点。 (2)当 x k 为无穷点列时,收敛到 f ( x) 的
第3.2节 Newton法及其改进
第3.1节 最速下降法(Steepest Method)
对于最速下降法的几点说明 (1)第2.6节中介绍的关于下降算法的收敛 性定理对最速下降法都是成立的 。 (2)目标函数在负梯度方向下降得最快只 是局部性质。 (3)锯齿现象 (4)改进策略:在计算的开始阶段使用最 速下降法,在迭代数次后,改用其他算法。
本节的主要内容:
(1)牛顿法的基本思想
(2)阻尼牛顿法
(3)带保护措施的阻尼牛顿法
(4)吉尔-默里稳定牛顿法
(5)信赖域方法(一)
第3.2节 Newton法及其改进
(1)牛顿法的基本思想: * 在目标函数f ( x)的极小点 x 的近似点 x k 附近将 f ( x) 二阶Tayler展开,用展开的二次 函数去逼近 f ( x),将这个二次函数的极小点 * x 作为 的一个新的近似点 x k 1 ,依次下去, 用一系列二次函数的极小点 xk 1 去逼近 f ( x) 的极小点 x * 。
第3.2节 Newton法及其改进
设 f ( x)二次连续可微,则 f ( x) 在 x k 处的二次 近似为: 1 T f ( x) qk ( x) f ( xk ) f ( xk ) ( x xk ) ( x xk )T 2 f ( xk )( x xk ) 2 令
无约束常用优化方法

步长 ,作前进(或后退)试探.如试探成功(目
标函数值有所减小),则按步长序列
,加
大步长(注意每次加大步长都是由初始点算起),直
至试探失败(目标函数值比前一次的有所增加)时,
则取其前一次的步长作为沿这个坐标轴方向搜索的最
优步长,并计算出该方向上的终止点,而后以这个终
止点为始点再进行下一坐标轴方向的搜索,并重复上
处
显然 是二次函数,并且还是正定二次函数,所以 是凸函数且存在唯一全局极小点.为求此极小点,令
即可解得
即
(5.9)
对照基本迭代公式,易知,式(5.9)中的搜索方向
步长因子
方向
是直指点 处近似二次函数
的极小点的方向.此时称此方向为从点 出发的
Newton方向.从初始点开始,每一轮从当前迭代点出发,
沿Newton方向并取步长 的算法称为Newton法.
另外,共轭梯度法不要求精确的直线搜 索.但是,不精确的直线搜索可能导致迭代 出来的向量不再共轭,从而降低方法的效 能.克服的办法是,重设初始点,即把经过 n次迭代得到的Xn作为初始点重新迭代.
五、坐标轮换法
在坐标轮换法中,沿各个坐标轴方向进行一维搜索
时,常选用最优步长法或加速步长法.加速步长法从
初始点出发,沿搜索(坐标轴)方向先取一个较小的
三、共轭方向法
1、概念
通常,我们把从任意点
出发,依次沿某组共轭
方向进行一维搜索的求解最优化问题的方法,叫做共
轭方向法.
2、特点
• 一般地,在n维空间中可以找出n个互相共轭的方向,对于n元正 定二次函数,从任意初始点出发,顺次沿这n个共轭方向最多作n 次直线搜索就可以求得目标函数的极小点.这就是共轭方向法的 算法形成的基本思想.
凸优化之无约束优化(一维搜索方法:二分法、牛顿法、割线法)

凸优化之⽆约束优化(⼀维搜索⽅法:⼆分法、⽜顿法、割线法)1、⼆分法(⼀阶导)⼆分法是利⽤⽬标函数的⼀阶导数来连续压缩区间的⽅法,因此这⾥除了要求 f 在 [a0,b0] 为单峰函数外,还要去 f(x) 连续可微。
(1)确定初始区间的中点 x(0)=(a0+b0)/2 。
然后计算 f(x) 在 x(0) 处的⼀阶导数 f'(x(0)),如果 f'(x(0)) >0 , 说明极⼩点位于 x(0)的左侧,也就是所,极⼩点所在的区间压缩为[a0,x(0)];反之,如果 f'(x(0)) <0,说明极⼩点位于x(0)的右侧,极⼩点所在的区间压缩为[x(0),b0];如果f'(x(0)) = 0,说明就是函数 f(x) 的极⼩点。
(2)根据新的区间构造x(1),以此来推,直到f'(x(k)) = 0,停⽌。
可见经过N步迭代之后,整个区间的总压缩⽐为(1/2)N,这⽐黄⾦分割法和斐波那契数列法的总压缩⽐要⼩。
1 #ifndef _BINARYSECTION_H_2#define _BINARYSECTION_H_34 typedef float (* PtrOneVarFunc)(float x);5void BinarySectionMethod(float a, float b, PtrOneVarFunc fi, float epsilon);67#endif1 #include<iostream>2 #include<cmath>3 #include "BinarySection.h"45using namespace std;67void BinarySectionMethod(float a, float b, PtrOneVarFunc tangent, float epsilon)8 {9float a0,b0,middle;10int k;11 k = 1;12 a0 = a;13 b0 = b;14 middle = ( a0 + b0 )/2;1516while( abs(tangent(middle)) - epsilon > 0 )17 {18 #ifdef _DEBUG19 cout<<k++<<"th iteration:x="<<middle<<",f'("<<middle<<")="<<tangent(middle)<<endl;20#endif2122if( tangent(middle) > 0)23 {24 b0 = middle;25 }26else27 {28 a0 = middle;29 }30 middle =( a0+b0)/2;31 }3233 cout<<k<<"th iteration:x="<<middle<<",f'("<<middle<<")="<<tangent(middle)<<endl;34 }1 #include<iostream>2 #include "BinarySection.h"345float TangentFunctionofOneVariable(float x)6 {7return14*x-5;//7*x*x-5*x+2;8 }910int main()11 {12 BinarySectionMethod(-50, 50, TangentFunctionofOneVariable, 0.001);13return0;14 }1th iteration:x=0,f'(0)=-52th iteration:x=25,f'(25)=3453th iteration:x=12.5,f'(12.5)=1704th iteration:x=6.25,f'(6.25)=82.55th iteration:x=3.125,f'(3.125)=38.756th iteration:x=1.5625,f'(1.5625)=16.8757th iteration:x=0.78125,f'(0.78125)=5.93758th iteration:x=0.390625,f'(0.390625)=0.468759th iteration:x=0.195312,f'(0.195312)=-2.2656210th iteration:x=0.292969,f'(0.292969)=-0.89843811th iteration:x=0.341797,f'(0.341797)=-0.21484412th iteration:x=0.366211,f'(0.366211)=0.12695313th iteration:x=0.354004,f'(0.354004)=-0.043945314th iteration:x=0.360107,f'(0.360107)=0.041503915th iteration:x=0.357056,f'(0.357056)=-0.001220716th iteration:x=0.358582,f'(0.358582)=0.020141617th iteration:x=0.357819,f'(0.357819)=0.0094604518th iteration:x=0.357437,f'(0.357437)=0.0041198719th iteration:x=0.357246,f'(0.357246)=0.0014495820th iteration:x=0.357151,f'(0.357151)=0.0001144412、⽜顿法(⼆阶导)前提:f 在 [a0,b0] 为单峰函数,且[a0,b0] 在极⼩点附近,不能离的太远否则可能⽆法收敛。
最优化方法第六讲 无约束(多维)最优化
step4. 若 || f ( xk1) || ,停止,x* xk1 ;
否则,令 k : k 1, 转step 2 。
14
➢算法框图
给定初始点x0和精度 || f ( x0 ) ||
停止,输出x1
否
是
| x1 x0 |
是 停止,输出x0
否 否
2 f (x0) 0
计算x1
x0
f ( x0 ) 2 f (x0)
1
13 62
x2
x1
1d 1
(
36 , 31
8 31
)T
7
三、最速下降法的特点
1.性质. 设 f ( x) 有一阶连续偏导数,若 步长 满足 k
f ( xk d k ) min f ( xk d k )
k
则有 f ( xk d k )T d k 0。 k
证明:令 ( ) f ( xk d k ),所以
5
一、梯度法(最速下降法):
1. 搜索方向:d k f ( xk ) ,也称为最速下降方向;
2. 搜 索 步 长: k 取 最 优 步 长, 即 满 足
f (xk
kd k )
min
f
(xk
d k ) 。
二、梯度法算法步骤:
1. 给定初始点 x1 Rn ,允许误差 0, 令k 1。
2. 计算搜索方向 d k f ( xk ) ;
Step3. 令 xk 1 xk kd k , 其中tk : f ( xk kd k ) min f ( xk d k )。
24
Step 4. 判断 xk 1 是否满足终止准则: yes: 计算 stop, 则x* : xk1
No : 转 step 5 。
运筹学第16讲 无约束最优化方法 (2)
k=k+1 d(k)=-H(k) ▽ f(x(k)) 一维搜索得λk x(k+1)=x(k)+ λk d(k)
修正H(k)产生H(k+1)
N
||x(k+1)-x(k)||<
ε?
y
Stop. x(k+1)----解
第五章4 变尺度法
下面构造H(k) ,要求H(k) 是▽2f(x(k))的近似且能逐次迭
第五章 2 Newton法
二、 Newton法的改进: (1)为减小工作量,取m(正整数),使每m次迭代使用同一个 Hesse阵,迭代公式变为: x(km+j+1)=x(km+j)-[▽2f(x(km))]-1 ▽f(x(km+j)) j=0,1,2, …,m-1 , k=0,1,2, … 特点:收敛速度随m的增大而下降 m=1时即Newton法, m→∞ 即线性收敛。 (2)带线性搜索的Newton法: 在Newton迭代中,取d(k)= -[▽2f(x(k)) ]-1 ▽f(x(k)) , 加入线性搜索:min f(x(k)+λk d(k)) 求得λk , x(k+1)=x(k)+λkd(k) 特点:可改善局部收敛性,当d(k)为函数上升方向时,可向负方 向搜索,但可能出现± d(k)均非下降方向的情况。
第五章4 变尺度法
二、DFP法: (续)
令修正公式为 ( 秩 2 公式 )。满足拟 则 H = H + α UU Newton 条件
T
+ β VV
T
u,v ∈ R n
S = H y.
S = Hy + α ( u T y ) u + β ( v T y ) v v = Hy 1 ST y ,
无约束最优化问题的求解算法和应用
无约束最优化问题的求解算法和应用随着科技的发展和应用领域的扩大,无约束最优化问题已经越来越成为一种关注的研究领域。
在现实生活中,无约束最优化问题的求解可以应用在多个方面,比如金融、医学、机械工程等等。
然而,在实际应用中,我们往往需要利用已经发展的优秀算法进行求解。
本文将会介绍无约束最优化问题的求解算法及其应用。
一、无约束最优化问题的概念无约束最优化问题指的是在一定的条件下,通过调整某些变量来最大或最小化指定的目标函数。
这些变量的调整需遵守一定的限制条件,并且通过各种数值分析方法,比如数值解析和计算机数值算法等技术来求解这样的问题。
无约束最优化问题的数学形式一般为:$$ \min_{x \in \mathbb{R}^n} f(x) $$其中,$x \in \mathbb{R}^n$ 是 $n$ 维空间中的一个向量,$f(x)$ 则是目标函数,该函数需要满足一定的条件,比如连续、可微、凸等等。
当函数连续、可微的情况下,就能有效地应用求导法来求解这个问题。
二、基于梯度下降的算法在求解无约束最优化问题时,最常用的算法就是基于梯度下降的算法。
该算法通过沿着负梯度的方向一步步得逼近全局极小值。
算法的主要流程如下:1、初始化变量$x$,比如$x=0$;2、计算目标函数$ f(x)$ 的梯度 $\nabla f(x)$;3、计算下降方向 $p$,$p=-\nabla f(x)$;4、选择步长 $\alpha$,更新$x$ $x_{k+1} = x_{k} + \alpha p$;5、重复执行步骤2-4 进行更新,直到满足一定的终止条件为止。
这种方法的收敛性非常好,同时也比较容易实现。
在实际应用中,通常会将其与其他迭代方法组合使用,比如牛顿、拟牛顿等方法来提升其求解精度。
三、基于共轭梯度的算法基于梯度下降的算法虽然求解精度较好,但是当求解目标函数具有高度弱凸性质时,算法的收敛速度会相对较慢。
为了克服这类问题,研究人员往往会采用共轭梯度法。
第三章无约束问题的最优化方法
赋以0.618。
2 ,
;并计算其对应
的函数值。 3)根据区间消去法原理缩短搜索区间。为了能用原来的 坐标点计算公式,需进行区间名称的代换,并在保留区间 中计算一个新的试验点及其函数值。
如果
令 b , , f f 记N0=0; 2 2 1 2 1 如果 ,则新区间= ,
2
2
图2-5 黄金分割法
• 黄金分割法要求插入两点: a1 a (1 )(b a), f1 f (a1 )
a2 a (b a), f 2 f (a2 )
黄金分割法的搜索过程:
1)给出初始搜索区间及收敛精度 2)按坐标点计算公式计算 1
,将
在搜索区间内[a,b] 任取两点a1、b1,令f1=f(a1), f2=f(b1) • (1)如f1<f2, 则缩小的新区间为[a,b1]; • (2)如f1>f2, 则缩小的新区间为[a1,b]; • (3)如f1=f2, 则缩小的新区间为[a1,b1]
f(b1) f(a1) f(a1) f(b1) f(a1) f(b1)
a
a1
b
a
a1
b1 b
a
a1
b1
b
§3.2 一维搜索方法
黄金分割法: • 黄金分割法适用于[a,b]区间上的任何单谷函数求极小值问题。对 函数除要求“单谷”外不作其他要求,甚至可以不连续。因此,这种 方法的适应面相当广。 • 黄金分割法也是建立在区间消去法原理基础上的试探方法。 • 在搜索区间内[a,b]适当插入两点,将区间分成三段;利用区间消 去法,使搜索区间缩小,通过迭代计算,使搜索区间无限缩小,从而 得到极小点的数值近似解。 •
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无约束优化方法---鲍威尔方法本实验用鲍威尔方法求函数f(x)=(x1-5)2+(x2-6)2 的最优解。
一、简述鲍威尔法的基本原理从任选的初始点x⑴o出发,先按坐标轮换法的搜索方向依次沿e1.e2.e3进行一维搜索,得各自方向的一维极小点x⑴ x⑵ x⑶.连接初始点xo⑴和最末一个一维极小点x3⑴,产生一个新的矢量 S1=x3⑴-xo⑴再沿此方向作一维搜索,得该方向上的一维极小点x⑴.从xo⑴出发知道获得x⑴点的搜索过程称为一环。
S1是该环中产生的一个新方向,称为新生方向。
接着,以第一环迭代的终点x⑴作为第二环迭代的起点xo⑵,即 Xo⑵←x⑴弃去第一环方向组中的第一个方向e1,将第一环新生方向S1补在最后,构成第二环的基本搜索方向组e2,e3,S1,依次沿这些方向求得一维极小点x1⑵,x2⑵,x3⑵.连接Xo⑵与x3⑵,又得第二环的新生方向S2=x3⑵-xo⑵沿S2作一维搜索所得的极小点x⑵即为第二环的最终迭代点二、鲍威尔法的程序#include "stdafx.h" /* 文件包含*/#include <math.h>#include <stdio.h>#include <stdlib.h>#define MAXN 10#define sqr(x) ((x)*(x))double xkk[MAXN],xk[MAXN],sk[MAXN];int N,type,nt,et; //N--变量个数,type=0,1,2,3 nt,et--不等式、等式约束个数double rk;double funt(double *x,double *g,double *h){g[0]=x[0]; g[1]=x[1]-1; g[2]=11-x[0]-x[1];return sqr(x[0]-8)+sqr(x[1]-8);}double F(double *x){double f1,f2,ff,fx,g[MAXN],h[MAXN];int i;fx=funt(x,g,h);f1=f2=0.0;if(type==0 || type==2)for(i=0; i<nt; i++) f1+=(fabs(g[i])>1.0e-15)?1.0/g[i]:1.0e15;else for(i=0; i<nt; i++) f1+=(g[i]>0)?0:g[i]*g[i];for(i=0; i<et; i++) f2+=h[i]*h[i];if(type==0 || type==2)ff=fx+rk*f1+f2/sqrt(rk);else ff=fx+rk*(f1+f2);return ff;}double f(double x){int i;for (i=0; i<N; i++) xkk[i]=xk[i]+x*sk[i];return F(xkk);}void find_ab(double x0,double h0,double *a,double *b) {double h,x1,y1,x2,y2,x3,y3;h=h0;x1=x0; y1=f(x1); x2=x1+h; y2=f(x2);if (y2>=y1) {h=-h0; x3=x1; y3=y1;x1=x2; y1=y2; x2=x3; y2=y3;}for (;;) {h*=2.0; x3=x2+h; y3=f(x3);if (y2<y3) break;x1=x2; y1=y2; x2=x3; y2=y3;}if (h>0) {*a=x1; *b=x3;}else {*a=x3; *b=x1;}}void search_gold(double a,double b,double e,double *x,double *y) {double x1,x2,y1,y2;x1=a+0.382*(b-a); y1=f(x1);x2=a+0.618*(b-a); y2=f(x2);do {if (y1<y2) {b=x2; x2=x1; y2=y1;x1=a+0.382*(b-a); y1=f(x1);} else {a=x1; x1=x2; y1=y2;x2=a+0.618*(b-a); y2=f(x2);}} while ((b-a)>e);*x=0.5*(a+b); *y=f(*x);}double nc_powell(double *x0,double e1,double e2){int i,j,k=1,m;double a,b,ax,ay,d;doubless[MAXN][MAXN],s1[MAXN],ff[MAXN],x[MAXN],xn[MAXN],xn 1[MAXN],f0,f1,f2,f3;for (i=0; i<N; i++) for (j=0; j<N; j++) if (j==i) ss[i][j]=1; else ss[i][j]=0;for (;;) {for (j=0; j<N; j++) xk[j]=x0[j];for (i=0; i<N; i++) {for (j=0; j<N; j++) sk[j]=ss[i][j];find_ab(0,1,&a,&b);search_gold(a,b,e2,&ax,&ay);for (j=0; j<N; j++) xk[j]=xkk[j];ff[i]=F(xk);}for (j=0; j<N; j++) xn[j] = xkk[j];for (j=0; j<N; j++) { sk[j]=xkk[j]-x0[j]; s1[j]=sk[j];}find_ab(0,1,&a,&b);search_gold(a,b,e2,&ax,&ay);for (j=0; j<N; j++) x[j]=xkk[j];d=0;for (j=0; j<N; j++) d+=(x[j]-x0[j])*(x[j]-x0[j]);d=sqrt(d);printf("k=%d;",k);for (j=0; j<N; j++) printf("x[%d]=%lf;",j+1,x0[j]);printf("d=%lf\n",d);if (d<=e1) {for (j=0; j<N; j++) x0[j]=x[j];break;}f0=F(x0);d=f0-ff[0]; m=0;for (j=1; j<N; j++) if (d<ff[j-1]-ff[j]) {m=j; d=ff[j-1]-ff[j];} for (j=0; j<N; j++) xn1[j]=2*xn[j]-x0[j];f1=F(x0); f2=F(xn); f3=F(xn1);if (0.5*(f1-2*f2+f3)>=d) {if (f2<f3) for (j=0; j<N; j++) x0[j]=xn[j];else for (j=0; j<N; j++) x0[j]=xn1[j];} else {for (i=m+1; i<N; i++) for (j=0; j<N; j++) ss[i-1][j]=ss[i][j];for (j=0; j<N; j++) ss[N-1][j]=s1[j];for (j=0; j<N; j++) x0[j]=x[j];}k++;}for (j=0; j<N; j++) x0[j]=xkk[j];return F(xkk);}main(){double fk,fkk,ck,d1,d2,e1,e2;double g[MAXN],h[MAXN],x1[MAXN],x0[MAXN];int i;N=2;nt=3;et=0;type=1;e1=0.0001;e2=0.0001;rk=0.001; ck=2;x0[0]=8; x0[1]=8;printf("=========\n");fk = nc_powell(x0,0.01,0.001);for(i=0; i<N; i++) x1[i]=x0[i];printf("rk=%lf\n",rk);for (i=0; i<N; i++) printf("x[%d]=%lf;",i+1,x0[i]);printf("%lf\n",fk);for(;;) {rk*=ck;fkk = nc_powell(x0,0.01,0.005);printf("rk=%lf\n",rk);for (i=0; i<N; i++) printf("x[%d]=%lf;",i+1,x0[i]); printf("%lf\n",fkk);d1=0; for(i=0; i<N; i++) d1+=(x1[i]-x0[i])*(x1[i]-x0[i]); d1=sqrt(d1);d2=fabs((fkk-fk)/fk);printf("d1=%lf d2=%lf\n",d1,d2);if(d1<=e1 || d2<=e2) break;for(i=0; i<N; i++) x1[i]=x0[i];fk=fkk;}fk=funt(x0,g,h);printf("**********************\n");for (i=0; i<N; i++) printf("x[%d]=%lf;",i+1,x0[i]);printf("F* = %lf\n",fk);for (i=0; i<nt; i++) printf("g[%d]=%lf;",i+1,g [i]); return 1;}。