飞行时间法PPT课件
合集下载
JEPPSEN飞行计划ppt课件

据包,由Jeppesen确定对应机型的数据库 中机型代号。
CFP的数据维护
• 新增飞机 引进新机后,性能室根据新飞机相关手册和机务工程部提 供的称重报告,及时录入该机的各种重量数据(最大着陆 重量、最大零油重量、操作空重、最大业载)、最大载油 量、选呼号及机载导航设备、能力等数据。
• 飞机重量数据的变更 飞机定检后,性能室根据机务工程部提供的称重报告,及 时修改对应的飞机重量数据。
Jet planner软件总体介绍
该软件主要是由JEPPSEN公司为航空公司进行签派 放行设计的软件,其中包含了计算机飞行计划、签派放行、 机型性能、气象资料、航行情报等相关内容,是一款综 合功能的软件,能够实时的查询相关的资料,限制,并 根据数据后台提供的数据,进行实时的计算机飞行计划 的制作。
CFP阅读
• I CERTIFY THAT THIS FLIGHT IS
RELEASED/DISPATCHED IN
ACCORDANCEWITH ALL APPLICABLE ICAO REGULATIONS我证明此次飞行签派 放行符合国际民航组织相关规则。
• DISPATCHER . . .签派员
滑行油量
• 不记入航段耗油 • 由签派室根据QAR数据分析设定,并在
QAR数据基础上增加相应机型1小时APU耗 油,在每年航班换季时根据QAR数据分析 更新。由于运行条件变化需临时改变时, 由签派室临时更改。
额外油量
• 不记入航段耗油 • 由签派室根据以下运行情况设定: • a、性能限制需要考虑的油量,例如部分单
CFP阅读
油量设置
备降航路的选择: 分为:国内,国际, 岛屿。此处我们选择 Domestic.
公司根据自己的不同航线的需求,将 制定不同的油量政策,我们公司是拉 萨,西昌,攀枝花,迪庆,丽江,九 寨等地,以固定油量为准。就会在此 处设置。
CFP的数据维护
• 新增飞机 引进新机后,性能室根据新飞机相关手册和机务工程部提 供的称重报告,及时录入该机的各种重量数据(最大着陆 重量、最大零油重量、操作空重、最大业载)、最大载油 量、选呼号及机载导航设备、能力等数据。
• 飞机重量数据的变更 飞机定检后,性能室根据机务工程部提供的称重报告,及 时修改对应的飞机重量数据。
Jet planner软件总体介绍
该软件主要是由JEPPSEN公司为航空公司进行签派 放行设计的软件,其中包含了计算机飞行计划、签派放行、 机型性能、气象资料、航行情报等相关内容,是一款综 合功能的软件,能够实时的查询相关的资料,限制,并 根据数据后台提供的数据,进行实时的计算机飞行计划 的制作。
CFP阅读
• I CERTIFY THAT THIS FLIGHT IS
RELEASED/DISPATCHED IN
ACCORDANCEWITH ALL APPLICABLE ICAO REGULATIONS我证明此次飞行签派 放行符合国际民航组织相关规则。
• DISPATCHER . . .签派员
滑行油量
• 不记入航段耗油 • 由签派室根据QAR数据分析设定,并在
QAR数据基础上增加相应机型1小时APU耗 油,在每年航班换季时根据QAR数据分析 更新。由于运行条件变化需临时改变时, 由签派室临时更改。
额外油量
• 不记入航段耗油 • 由签派室根据以下运行情况设定: • a、性能限制需要考虑的油量,例如部分单
CFP阅读
油量设置
备降航路的选择: 分为:国内,国际, 岛屿。此处我们选择 Domestic.
公司根据自己的不同航线的需求,将 制定不同的油量政策,我们公司是拉 萨,西昌,攀枝花,迪庆,丽江,九 寨等地,以固定油量为准。就会在此 处设置。
第三章 飞机的飞行原理ppt课件
(1)飞机结冰增加机体重量;
(2)机翼机尾结成冰壳,损坏其流线外形;
(3)喷射发动机进口结冰,发动机丧失发动能力;
(4)天线结冰,致使无线电精选雷课件达ppt信号失灵等。
13
二、大气与飞行安全
乱流——飞机飞入对流性云区,如积云、积雨云、层积云, 由于空气发生上下对流垂直运动,使机身起伏不定,会使乘 客感觉不舒服、晕机呕吐、颠伤,严重时导致飞机结构损坏, 造成飞机失事。
精选课件ppt
6
一、大气的结构和气象要素
气压就是大气压强,度量气压的单位为帕斯卡,符号是 Pa。气压的大小和高度、温度、密度有关。一般情况下随 高度的升高而降低,依此规律可测量飞行高度。因而气压 也就成了重要的大气资料。
精选课件ppt
7
一、大气的结构和气象要素
能见度是指正常视力者能看清目标轮廓的最大水平距离。对 飞行员来说,最重要的是跑道能见度(着陆能见度),它是指飞 机在下降着陆过程中飞行员能看清跑道近端的最远距离。影响能 见度的因素很多,主要的是受大气透明度(如云、雾、烟、沙尘 及水滴等直接影响着大气的透明状况因素),夜间的灯光强度等。
17
三、大气飞行环境
平流层位于对流层顶的上面,其顶界由地面伸展到35一 40公里。由于这一层受地球表面影响较小,所以气温基本上 保持不变,大约为-56.51℃,故又称同温层。平流层中,几 乎没有水蒸气,所以没有雪、雾、云等气象现象;且空气比较 稀薄,风向稳定,空气主要是水平流动。
飞行器的飞行的理想环境是平流层。
精选课件ppt
10
一、大气的结构和气象要素
降水是云雾中的水滴或冰晶降到地面的现象。降水通常 指雨、雪、冰、雹等。
降水对飞行的影响: 1.降水使能见度减小。 2.过冷雨滴会造成飞机结冰。 3.降水影响了跑道的正常使用。
《飞行时间计算》课件
《飞行时间计算》PPT课 件
飞行时间计算是航空领域中一项重要的技术,本课件将介绍飞行时间计算的 概述、公式、影响因素、实际案例分析以及如何优化飞行效率。
概述
什么是飞行时间计算
飞行时间计算是通过各种因素的综合分析,确定航班预计的飞行时间。
飞行时间的重要性
飞行时间的准确计算对航空公司的航班调度、乘客的行程规划以及燃料消耗的预估都至关重 要。
1
飞行时间计算实际应用
飞行时间计算在实际航班调度过程中起着重要的作用,保证航班的准时到达。
2ቤተ መጻሕፍቲ ባይዱ
案例1 :国内航班的飞行时间计算
国内航班涉及的因素较为简单,飞行时间计算主要基于航程和飞行速度。
3
案例2 :长途国际航班的飞行时间计算
长途国际航班的飞行时间计算需要考虑更复杂的因素,如航线优化和燃料消耗预 估。
飞行时间计算公式
1 简单的飞行时间计算公式
简单的飞行时间计算公式通常基于航程、飞行速度和飞行历史数据,用来估计飞行时间。
2 更复杂的计算公式及应用场景
更复杂的计算公式会考虑气象因素、飞行器型号及性能、飞行路线以及燃料消耗等因素。
影响飞行时间的因素
气象因素
天气状况如风速、 温度和降水等对飞 行时间有直接影响。
总结
1 飞行时间计算的
重要性
准确计算飞行时间对 航空公司和乘客都至 关重要,可以提高航 班的准时性和旅客的 舒适度。
2 对航空公司和乘
客的影响
飞行时间计算影响着 航空公司航班调度和 乘客行程规划,同时 也关系到燃料消耗和 成本控制。
3 如何提高飞行效
率及节约时间
通过航线优化、飞行 器性能提升和燃料消 耗控制等方式可以提 高飞行效率,节约时 间和成本。
飞行时间计算是航空领域中一项重要的技术,本课件将介绍飞行时间计算的 概述、公式、影响因素、实际案例分析以及如何优化飞行效率。
概述
什么是飞行时间计算
飞行时间计算是通过各种因素的综合分析,确定航班预计的飞行时间。
飞行时间的重要性
飞行时间的准确计算对航空公司的航班调度、乘客的行程规划以及燃料消耗的预估都至关重 要。
1
飞行时间计算实际应用
飞行时间计算在实际航班调度过程中起着重要的作用,保证航班的准时到达。
2ቤተ መጻሕፍቲ ባይዱ
案例1 :国内航班的飞行时间计算
国内航班涉及的因素较为简单,飞行时间计算主要基于航程和飞行速度。
3
案例2 :长途国际航班的飞行时间计算
长途国际航班的飞行时间计算需要考虑更复杂的因素,如航线优化和燃料消耗预 估。
飞行时间计算公式
1 简单的飞行时间计算公式
简单的飞行时间计算公式通常基于航程、飞行速度和飞行历史数据,用来估计飞行时间。
2 更复杂的计算公式及应用场景
更复杂的计算公式会考虑气象因素、飞行器型号及性能、飞行路线以及燃料消耗等因素。
影响飞行时间的因素
气象因素
天气状况如风速、 温度和降水等对飞 行时间有直接影响。
总结
1 飞行时间计算的
重要性
准确计算飞行时间对 航空公司和乘客都至 关重要,可以提高航 班的准时性和旅客的 舒适度。
2 对航空公司和乘
客的影响
飞行时间计算影响着 航空公司航班调度和 乘客行程规划,同时 也关系到燃料消耗和 成本控制。
3 如何提高飞行效
率及节约时间
通过航线优化、飞行 器性能提升和燃料消 耗控制等方式可以提 高飞行效率,节约时 间和成本。
AOPA飞行原理ppt课件

第二章 第 页
完整版PPT课件
12
翼型的选择
• 翼型的升力特性; • 翼型的阻力; • 翼型的使用范围; • 平面形状的影响; • 足够的空间和刚度; • 翼型选择的一般规律;
第二章 第 页
完整版PPT课件
13
第三节 机翼的平面形状
第二章 第 页
完整版PPT课件
14
机翼的展弦比: 机翼的梢根比: 机翼的后掠角: 机翼的平均气动弦长:
完整版PPT课件
9
第二章 第 页
完整版PPT课件
10
四、起降装置
第二章 第 页
完整版PPT课件
11
第二节 翼型
中弧线:翼型的上下表面的等距离的曲线。 前缘、后缘:机翼上下表面的外形线在前后的交点。 前缘半径:翼型前缘曲率圆的半径 。 弦线:前缘和后缘端点的连线。 弦长:弦线被前缘和后缘所截长度。
第一章 飞机的基本结构
第一节:固定翼飞机的主要组成部分
小型固定翼飞机的主要部件: 机体、起落架、动力装置
主要组成部分-机体: 机身、机翼、尾翼
第二章 第 页
完整版PPT课件
1
固定翼无人机第二章 第 页来自完整版PPT课件2
一、机身
装载
飞行控制系统、动力系统、通讯系 统、燃料系统、任务系统等。
将机翼、尾翼、发动机、起落架连 在一起,形成完整的飞行平台
1 2
v2
PP0
1 2
v 2 —动压,单位体积空气所具有的动能。这是一种附加的压
力,是空气在流动中受阻,流速降低时产生的压力。
P —静压,单位体积空气所具有的压力能。在静止的空气中, 静压等于当时当地的大气压。
P —总压(全压),它是动压和静压之和。总压可以理解为 0 ,气流速度减小到零之点的静压。 完整版PPT课件
质谱基础知识-飞行时间质谱仪原理及应用 PPT
直线式VS反射式
直线型飞行时间质谱仪的 主要缺点:分辨率低。
离子初始能量不同,使得 具有相同质荷比的离子达 到检测器的时间有一定分 布,造成分辨能力下降。
改进的方法
在线性检测器前面的加上 一组静电场反射镜,将自 由飞行中的离子反推回去, 初始能量大的离子由于初 始速度快,进入静电场反 射镜的距离长,返回时的 路程也就长,初始能量小 的离子返回时的路程短, 这样就会在返回路程的一 定位置聚焦,从而改善了 仪器的分辨能力。
质量精度(mass accuracy):衡量质谱仪器测量物质 成分的准确度;ppm
质量范围(mass range ):质谱仪器测量物质成分的 质量大小范围;1~ ∞
灵敏度(sensitivity):质谱仪器所能测量物质成分 的最低含量;单分子检测
飞行时间质谱仪TOF-MS的构成
离子源:
电喷雾电离源(ESI)
大家应该也有点累了,稍作休息
大家有疑问的,可以询问和交流
飞行时间质谱仪TOF-MS的构成
质量分析器
TOF-MS分辨率低的原因
时间分散 空间分散 能量分散
改进方法
脉冲电离 离子延迟引出 反射器技术
目前, TOF -MS大都装有反射器,使离子 经过多电极组成的反射器后沿V型或W 型路线飞行到达检测器,使得分辨率可 达20 000 以上, 最高检测质量可超过 300 000 Da,且具有很高的灵敏度。
+ +
++ + ++
+
+++ +++
+++ +++
+
神舟1-6号的资料和发射时间PPT课件

1、飞船的重量
火箭起飞重量479吨,火箭加上飞船重量 约44吨,其它的都是液体推进剂。因此, 火箭的90%都是液体,比人体含水量还 大。 飞船重量为8吨多,占船箭组合体起飞重 量的六十二分之一:要把一公斤的东西 送入轨道,就得消耗62公斤的火箭重量。 神舟六号飞船比神舟五号在重量上有所 增加,因此发射神六的火箭也重了不少。
除了中国飞天第一人杨利伟外神舟五号载人飞船返回舱内还搭载有一面具有特殊意义的中国国旗一面北京2008年奥运会会徽旗一面联合国国旗人民币主币票样中国首次载人航天飞行纪念邮票中国载人航天工程纪念封和来自祖国宝岛台湾的农作物种子等
神舟1~6号的资料和发射时间
神舟一号:横空出世
1999年11月20日6时30分7秒,中国第一艘不载人的试验飞船——神舟一 号,从酒泉卫星发射中心发射升空。在完成预定的科学试验后,于11月 21日3时41分在内蒙古中部地区成功着陆,中国人成功实现了天地往返 的重大突破!飞行时间/圈数:21小时11分/14圈。 神舟一号飞船座舱内放置有一个高1.70米左右、身着航天服的男性模拟 人。这个模拟人是一个感应器,用于收集返回舱在太空中的温度、湿度、 氧气等各种试验数据。 搭载物品:一是旗类,中华人民共和国国旗、澳门特别行政区区旗、奥 运会会旗等;二是各种邮票及纪念封;三是各10克左右的青椒、西瓜、 玉米、大麦等农作物种子,此外还有甘草、板蓝根等中药材。 1992年,载人航天工程列入国家计划。在全国各有关部门和科技人员的 大力协同下,航天科技人员仅用7年的时间就攻克了载人航天的三大技术 难题,即研制成功了可靠性很高的大推力火箭,掌握了载人飞船的安全 返回技术,建造了载人太空飞行良好的生命保障系统。 “我们的飞船比美、苏的晚40年才发射,但飞船技术水平要和他们现在 的相当,要体现技术进步,不能照抄,要迎头赶上。”王永志说。 短短七八年的时间,中国航天人走完了发达国家三四十年所走过的路。 中国第一艘神舟号无人飞船的发射升空,揭开了中国载人航天技术发展 新的一页。
无人机飞行训练课件PPT
第10章 无人机飞行训练
多旋无人机场外飞行训练
飞行前检查及安全飞行原则1.飞行前检查(1)飞行前要对飞机进行全面检查,确保飞机能够正常工作。(2)飞行前要对飞行场地周围环境进行检查,如遇恶劣天气或飞行场地周围有高大建筑物都不适合飞行。2.安全飞行原则(1)军事管制区、机场静空区等禁飞区不能飞;(2)人员密集区不飞;(3)复杂气象条件不飞;(4)高层建筑密集区不飞。
第10章 无人机飞行训练
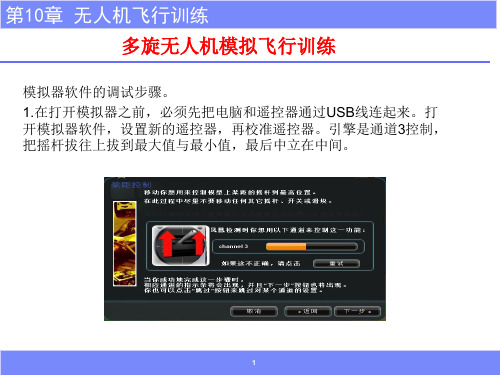
多旋无人机模拟飞行训练
多旋无人机模拟飞行基本动作(3)自转1周要求:悬停悬转时高度不变,旋转速率90°∕s,停止时无提前或滞后现象,过程中无错舵发生,不能超过直径2m的圆,掉高不超过0.5m。(4)水平8字要求: 在画八字时不能掉高度;在画八字时,点到航线到。飞机到点时航向也要到点;注意航向和速度要保持一致;在画八字时,飞机尽量往外飞,但是不能太超过度。
第10章 无人机飞行训练
多旋无人机场外飞行训练
多旋无人机飞行动作训练3.自传1周方法:飞行器在2米高度悬停,然后绕自身重心点纵轴旋转一周360°(左右均可)。要求:悬停悬转时高度不变,旋转速率90°∕s,停止时无提前或滞后现象,过程中无错舵发生,不能超过直径2m的圆,掉高不超过0.5m。
第10章 无人机飞行训练
第10章 无人机飞行训练
多旋无人机场外飞行训练
多旋无人机飞行动作训练1.起飞/悬停/降落方法:飞行器由1米高度悬停开始,垂直上升至4米高度,转入悬停2秒后转入垂直下降过程,在1米高度上停止下降并转入悬停,如图10-11所示。要求:上升、下降匀速,速率为1米/s,悬停时间为2秒,飞行器不能超过直径2米的圆,无明显的大幅修正动作。
第10章 无人机飞行训练
多旋无人机场外飞行训练
多旋无人机飞行动作训练1.起飞/悬停/降落方法:飞行器由1米高度悬停开始,垂直上升至4米高度,转入悬停2秒后转入垂直下降过程,在1米高度上停止下降并转入悬停。要求:上升、下降匀速,速率为1米/s,悬停时间为2秒,飞行器不能超过直径2米的圆,无明显的大幅修正动作。
飞行程序设计ppt课件

1
第一节 直线离场
一、直线离场对航迹设置的要求 起始离场航迹与跑道中线方向相差在 15°以内为直线离场。离场航迹应尽量 与跑道中线延长线一致。当起始离场航 迹不经过跑道起飞末端(DER)时,在 正切跑道起飞末端处的横向距离不得超 过300m。直线离场航线必须在20.0km (10.8NM)以内取得航迹引导。
OIS面必须定期测量(每年一次即可)以证实障碍物是否 发生变化,从而保证最小超障余度和这些程序的整体性。 无论何时,如果有新增障碍物穿透OIS面时,应立即通知 主管部门。
12
四、最小超障余度(MOC)和 最小净爬升梯度(Gr)
1. 最小超障余度
在主区DER处的最小超障余度等于零(即航空器的最 低高度可以等于OIS面的起始高度—5m),此后最小 超障余度按照在飞行方向水平距离的0.8%增加。在有 陡峭地形的机场,应考虑增加最小超障余度。最小超 障余度最大可增加一倍。
14
第二节 转弯离场
一、航迹设置 1.当离场航线要求大于15°的转弯时我们称之为转弯离场。 2.航空器起飞离场在达到DER标高之上120m之前不允许转
弯。 3.如果因障碍物的位置和高度不能使转弯离场满足最低转
弯高度的准则,则离场程序应根据当地情况与有关飞行 单位协商进行设计。 4.转弯可规定在一个高度/高(指定高度转弯),一个定 位点或在一个电台上空进行(指定点转弯)。 5.当采用转弯离场时,航空器必须在转弯之后10km
第二节 转弯离场
三、在指定高度转弯离场 为了避开直线离场方向上的高大障碍物,或受空
域等条件限制,程序要求航空器在规定的航向 或由航迹引导,上升至一个规定的高度再开始 转弯的离场程序称为指定高度转弯离场,该高 度称为转弯高度。 转弯高度要保证航空器能够避开前方的高大障碍 物,同时有足够的余度飞越位于转弯保护区内 的所有障碍物。 指定高度转弯离场程序设计的基本任务就是选择 适当的离场航线,确定转弯高度。
第一节 直线离场
一、直线离场对航迹设置的要求 起始离场航迹与跑道中线方向相差在 15°以内为直线离场。离场航迹应尽量 与跑道中线延长线一致。当起始离场航 迹不经过跑道起飞末端(DER)时,在 正切跑道起飞末端处的横向距离不得超 过300m。直线离场航线必须在20.0km (10.8NM)以内取得航迹引导。
OIS面必须定期测量(每年一次即可)以证实障碍物是否 发生变化,从而保证最小超障余度和这些程序的整体性。 无论何时,如果有新增障碍物穿透OIS面时,应立即通知 主管部门。
12
四、最小超障余度(MOC)和 最小净爬升梯度(Gr)
1. 最小超障余度
在主区DER处的最小超障余度等于零(即航空器的最 低高度可以等于OIS面的起始高度—5m),此后最小 超障余度按照在飞行方向水平距离的0.8%增加。在有 陡峭地形的机场,应考虑增加最小超障余度。最小超 障余度最大可增加一倍。
14
第二节 转弯离场
一、航迹设置 1.当离场航线要求大于15°的转弯时我们称之为转弯离场。 2.航空器起飞离场在达到DER标高之上120m之前不允许转
弯。 3.如果因障碍物的位置和高度不能使转弯离场满足最低转
弯高度的准则,则离场程序应根据当地情况与有关飞行 单位协商进行设计。 4.转弯可规定在一个高度/高(指定高度转弯),一个定 位点或在一个电台上空进行(指定点转弯)。 5.当采用转弯离场时,航空器必须在转弯之后10km
第二节 转弯离场
三、在指定高度转弯离场 为了避开直线离场方向上的高大障碍物,或受空
域等条件限制,程序要求航空器在规定的航向 或由航迹引导,上升至一个规定的高度再开始 转弯的离场程序称为指定高度转弯离场,该高 度称为转弯高度。 转弯高度要保证航空器能够避开前方的高大障碍 物,同时有足够的余度飞越位于转弯保护区内 的所有障碍物。 指定高度转弯离场程序设计的基本任务就是选择 适当的离场航线,确定转弯高度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/11/18
18
最 新 技 术
2020/11/18
双向回波法是一种对测量系统的电路延迟进行标定
的方法,他能得到待测时间间隔的起点。超声波传感器 A与B面对面放置。假定A为发射头,其发射信号传播到 B端被接收。同时B将超声波反射后传到A被接收。图中 上方的波形为外部介质中传播的真实超声波信号,分别 为A刚发射的波形、传到B处的波形和返回至A端的波形。
所以不同的实验环境,误差大小也不同。
2020/11/18
17
四 超声波TOF影响因素 及最新技术
时钟偏移问题 为了实现时钟同步,TOF测距方法采用了时钟偏移 量来解决时钟同步问题。但由于TOF测距方法的时间 依赖于本地和远程节点,测距精度容易受两端节点中 时钟偏移量的影响。为了减少此类错误的影响,采用 反向测量方法,即远程节点发送数据包,本地节点接 收数据包,并自动响应,通过平均在正向和反向所得 的平均值,减少对任何时钟偏移量的影响,从而减少 测距误差。
当它的两极外加上固有振荡频率的脉冲电压时压电晶片会发生
共振并产生超声波。如果共振板接收到超声波时,也会迫使压
电晶片产生振动,反过来将机械能转换为电信号,成为超声波
接收器。 在超声波测距电路中,发射端连续输出一系列脉冲
方波,然后判断接收端,实现超声测距一般有以下两种方
法: ① 读取输出端脉冲电压的平均值,该电压 (其幅值基本
s=v*t/2
s—待测距离; v-信号飞行速度; t—飞行时间;
2020/11/18
3
一 简介
s=v*t/2
2020/11/18
4
二 应用
飞行时间法质谱仪
2020/11/18
5
二 应用
倒车系统(激光、超声波等)
2020/11/18
6
二 应用
核物理领域
核碰撞的物理 研究
2020/11/18
7
二 应用
时钟偏移:是指时钟信号到达数字电路各个部分所 用时间的差异。
2020/11/18
14
超声波测距系统 几种常用的信号 脉冲
2020/11/18
15
触发信号:门阀值法 矩形波法
2020/11/18
16
四 超声波TOF影响因素 及最新技术
温度上升,空气分子的密集程度就变化,而声波 传播速度与介质有关,试想下在水里和在空气中声波 传播速度的差异。介质物质分子越密集,声波传播速 度就越快,到真空中就没法传播了。
22
最 新 技 术
2020/11/18
23
最 新 技 术
2020/11/18
24
五 TOF与三维图像成型
2020/11/18
25
五 TOF与三维图像成型
2020/11/18
26
五 TOF与三维图像成型
随着科技的发展,传感器技术会愈发敏感,新 的信息采集技术以及处理系统误差的方法也会被应 用,会大大提高图像的分辨率,包含更多的图像信 息。
2020/11/18
9
二 应用
测速仪: 雷达 激光 红
外线 声波等
2020/11/18
10
二 应用
警用的测速仪分固定和流动两种
2020/11/18
11
三 超声波TOF测距
超声波测距主要应用于倒车雷达、建筑施工工地以及一些 工业现场,例如:液位、井深、管道长度等场合。
超声波发生器的内部结构有两个压电晶片和一个共振板,
19
最 新 技 术
为方便起见,将波形的峰值点作为发射和到达时刻,则 图中两波形间t0为超声波真实的传播时间。由于电路延 迟的影响,发出激励脉冲的起始时刻与发射时刻之间存 在固定电路延迟δ 1,B接收端接收到波形时刻与到达时 刻存在接收延迟σ1 ,A接收端存在接收延迟时间误差σ1. 以激励脉冲的起始时刻为时间零点。 则B端接收到波形的时刻为δ 1+t0+ σ2,A端接收到回波 的时刻为δ1+2t0+ σ1。两者差值∆t1=t0+ σ1- σ2 。
2020/11/18
20
基于双向回波法的超声波飞行时间距离测量
系统由硬件平台和软件模块构成。硬件平台包括
进行声电信号转换的超声波探头、超声波发射电
路、超声波接收放大电路、带通滤波器、Arm控
制和AD采集;软件模块包括采集卡设置、采集
2020/11/18
显示、数据处理等。
21
最 新 技 术
2020/11/18
飞行时间法
2020/11/18
1
飞行时间法
一 简介 二 应用 三 超声波TOF测距 四 超声波TOF影响因素及最新技术 五 TOF与三维图像行时间测量法(Time Of Flight)通过 确定测量发射信号与接收信号的飞行时 间间隔来实现距离测量。因此被测距离 可表示为:
三维成像技术
采用TOF技术的相机,其发射器通过向 目标发出振幅经过调制的出射光信号, 再通过探测器接受到目标反射的入射光, 通过出射光与入射光的相位差可以计算 出飞行的时间,结合光速,算出相机到 目标的距离。摄像机上每个像素都接收 到相应的距离信号,得出三维图像。
2020/11/18
8
二 应用
三维相机
由于不同的接收板延迟存在差异, σ1-σ2 不一定为0.此 时,选B为发射端,上述方法二次测量,则A接收到波形 的时刻为δ 2+t0+ σ1,δ 2为发射延迟。B接收回波信号时 刻为δ 2+2t0+ σ2 。两者差值为∆t2=t0+ σ2-σ1。
两探头之间超声波真实的飞行时间t0=(∆t1+∆t2)/2 两探头接收延迟的差值为∆ σ12= σ1- σ2= (∆t1-∆t2)/2
TOF三维图像将来可以应用在3维扫描,电子沙 盘,城市街道规划等领域。个人认为可以研究TOF 3D扫描仪,并将3D扫描仪与3D打印机连接,将扫 描到的信息可以快速的转化为实际的模型。
2020/11/18
27
2020/11/18
28
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
固定 )与距离成正比,测量电压即可测得距离; ② 测量输出
脉冲的宽度,即发射超声波与接收超声波的时间间隔 t,故被
2020/11/18
测距离为 S=v*t/2。
12
超声波TOF测距系统 原理图
2020/11/18
13
四 超声波TOF影响因素 及最新技术
信号:调制信号的频率、波长、波形等 计时:计时器触发的方式、时钟偏移、计时器误差等 环境:温度、机械系统振动噪声、空气传播介质等