力矩式自整角机工作原理及应用ppt课件
自整角机原理和应用
控制电机5 章章第第 5自整角机5.1 自整角机概述5.2 自整角机的基本结构5.3 自整角机的工作原理和基本特点5.5 自整角机的应用举例5.4 自整角机主要性能指标和技术数据5.6 力矩式自整角机本章要求:熟练掌握控制式自整角机的工作原理及其工作特点。
掌握控制式自整角机接收机输出绕组的位置、输出绕组电势与失调角的关系。
掌握力矩式自整角机的工作特点、静态整步转矩与失调角的关系、比整步转矩等。
掌握自整角发送机与接收机成对使用的特点,了解自整角机的应用。
5.1 概概 述述自整角机是自动控制系统中的同步元件。
利用两台或多台自整角机在电路上的联系,可以使相隔一定距离、机械上互不连接的两根或多根转轴保持同步旋转或产生相同的转角变化。
与发送轴(即主动轴)耦合的自整角机称为发送机;与接收轴(即被动轴)耦合的自整角机称为接收机。
21变速器前置放大器信号处理直流放大器可控硅控制线路电源雷达雷达接收器测速发电机直流伺服电动机自整角机发送机手轮αβ功率变换器接收机自整角机按其使用要求不同,可分为控制式自整角机和力矩式自整角机。
控制式自整角接收机输出的是与两轴转角差成一定关系的电压,该电压控制交流伺服电动机去带动被动轴旋转,故能带动较大负载。
由于接收机工作在变压器状态,故通常称为自整角变压器。
力矩式接收机直接输出力矩并带动负载,但带载能力差,只能带动指针、刻度盘等轻负载,常用于角度传输精度要求不很高的指示系统中。
自整角机按结构形式不同可分为接触式和无接触式两大类。
雷达高低角自动显示系统原理图1. 自整角接收机2. 自整角发送机3. 交流伺服电动机4. 放大器5. 刻度盘6. 减速器<U~U j ~123456αβE 2雷达高低角系统是如何进行工作的?思考:自整角机工作录象控制电机θ1 ~U jZ 1 Z 2 D 1 D 2D 3 5.2 自整角机的基本结构自整角机的基本结构定子:铁心,三相对称绕组;接成Y 。
转子:铁心,单相绕组。
第5章-自整角机(力矩式自整角机讲)
失调角也是随动系统中常用术语之一)。 由图 5 - 18 明
显可见δ=90°-γ, 代入式(5 - 11)得
第5章 自整角机
E2=E2max cos(90°-γ)=E2max sinγ
(5 - 12)
上式说明自整角机变压器 (ZKB)的输出电势与失调 角γ的正弦成正比, 其相应曲线形状如图 5 - 21 所示。 图上若在0°<γ<90°的范围内, 失调角γ增加输出电势 E2也增大; 若90°<γ<180° 时, 输出电势E2将随失调 角 γ增大而减小; γ=180°时 , 输出电势E2 又变为零。 但是, 当失调角γ变负时, 输出电势E2的相位将变反。
也就是失调同样的角度所获得的信号电压大, 因此系统
的灵敏度就高。
第5章 自整角机
图 5 - 23 输出电压在γ=0时的切线
第5章 自整角机
5.4 带有“ZKC”的控制式自整角机
自整角机除了作成对 (ZKF 和 ZKB) 运行外 , 还可在 ZKF 和 ZKB 之间再接入控制式差动发送机即 ZKC 作控 制式运行。 其目的是用来传递两个发送轴的角度和或 角度差。 第 5.2 节已说明差动式自整角机的结构特点: 转子采用隐极式结构, 而且转子铁心的槽中放置有三相 对称分布绕组, 并通过三组集电环和电刷引出, 参考图 5 - 9; 定子和普通自整角机完全相同, 属三相对称绕组, 参考图 5 - 7(a)和图 5- 8。
第5章 自整角机
(4) ZKB的输出电势的有效值E2=E2max sinγ, 其中γ叫
失调角。 失调角γ=90°-δ,γ角 是实际ZKB转子绕组轴 线(从Z2′到Z1′方向)偏移(超前)协调位置( 方向)的角 X t 度(取正号)(图 5 - 20 所示)。 协调位置为输出电势等于 零的位置。 在失调角比较小时, U 2=U 2max γ, 这里γ的 单位取弧度(rad)。
力矩自整角机2009
3、力矩式差动发送机:串接于发送机和接收机之间,以扩大转 力矩式差动发送机:串接于发送机和接收机之间, 轴的转角信号。( 。(将发送机转子转角及其自身的转子转角之和 轴的转角信号。(将发送机转子转角及其自身的转子转角之和 或差)转变为电信号送接收机。 (或差)转变为电信号送接收机。 4、力矩式差动接收机:串接于两台发送机之间,接收它们输出 力矩式差动接收机:串接于两台发送机之间, 的电信号,使转子的转角为两台发送机转子转角之和(或差) 的电信号,使转子的转角为两台发送机转子转角之和(或差)。
如果发送机转子的位置角为θ 接收机的转子位置角θ 如果发送机转子的位置角为 1,接收机的转子位置角 2,为那 么由励磁绕组产生的主磁场在其各相整步绕组中感应的电势的 有效值分别为
E1a=Ecosθ1 E1b=Ecos(θ1-120°) ° E1c=Ecos(θ1+120°) ° E2a=Ecosθ2 E2b=Ecos(θ2-120°) ° E2c=Ecos(θ2+120°) °
当发送机的转子转角为θ 接收机转子转角为θ 当发送机的转子转角为 1,接收机转子转角为 2, 调角θ=θ1-θ2。θ=0时称为协调位置。 时称为协调位置 调角 时称为协调位置。 (一)电势、电流 电势、
失
Hale Waihona Puke 励磁绕组接入单相交流励磁电源,产生脉振磁场, 励磁绕组接入单相交流励磁电源,产生脉振磁场,大小随时间正弦 脉振磁场 变化。 在三相整步绕组中感应变压器电势 相位相同, 变压器电势, 变化。 在三相整步绕组中感应变压器电势,相位相同,大小与绕组 位置有关。 位置有关。 如果发送机三相整步绕组的某相( 如果发送机三相整步绕组的某相(如a相)与磁励绕组的轴线重合作 相 为起始位置,那么此时该相的感应电动势, 为起始位置,那么此时该相的感应电动势,其有效值为 E=4.44fNKωΦm 为励磁电源的频率即主磁通的脉振频率; 式中 f为励磁电源的频率即主磁通的脉振频率; 为励磁电源的频率即主磁通的脉振频率 N为整步绕组每一相的线圈匝数; 为整步绕组每一相的线圈匝数; 为整步绕组每一相的线圈匝数 Kω为整步绕组的基波绕组系数; 为整步绕组的基波绕组系数; Φm为自整角机主磁通的幅值。 为自整角机主磁通的幅值。
自整角机
31
华中科技大学电机教研室
4-6 差动自整角机的结构和运行原理
在随动系统中,有时需要两台发送机来控制同一台接收机,后者可以指 示前二者转子偏转角的和或者差。这种情况下就要使用差动自整角机。 它主要有三种类型:控制式差动发送机,力矩式差动发送机和力矩式差 动接收机 一、 差动自整角机的结构 差动自整角机皆为隐极式结构,与绕线式异步电动机相似。在定、转子 铁心的槽中放置两极、三相分布绕组,并结成星形。转子绕组通过三组 滑环和电刷引出。 二、 差动自整角机的运行原理 系统1: 当要求自整角接收机所指示的角度为两个已知转角之和或差时,可以在 两台力矩式自整角发送机之间接入一台力矩式差动接收机,如图3-18。
sm
相同型号成对的自整角机中,因 采用同一励磁电源,所以直轴磁 通 d 相同。又合成磁势交轴分 量 F1q 和 F2 q,它们大小相等方 向相反。因此可知,这时发送机 和接收机的静态整步转矩大小相 等方向相反。在整步转矩的作用 下,失调角逐渐减小,直至协调 位置。
22
华中科技大学电机教研室
4-4 力矩式自整角机的主要技术指标
24
华中科技大学电机教研室
2. 控制式自整角机的运行性能 其工作原理图如图3-15,控制式自整角发送机的励磁绕组由单相交流 电源励磁,其三相整步绕组和自整角变压器的整步绕组对应相接。 而自整角变压器的输出常接至 放大器的输入端,放大器的输 出再接伺服电机的控制绕组。 这样,由伺服电机驱动负载转 动,并同时通过减速器带动自 整角变压器转子构成机械反馈 连接。 下面进一步对自整角机系统整步 绕组回路的电势,电流及自整角 变压器的合成磁势和输出电势进 行分析。
由以上分析可知:
1. 发送机和接收机中的直轴磁势分量,交轴磁势分量和合成磁势大小, 与发送机和接收机位置角无关,仅为失调角 的函数。
力矩式自整角机工作原理及应用
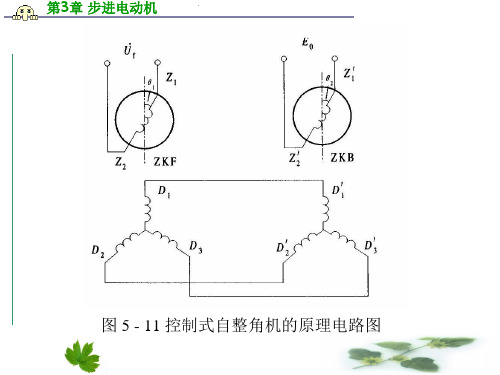
图 5 - 29为测量水塔内水位
5.6 自整角机的选用和技术数据
在自动控制系统中, 如果遇到要求能够“自动跟随”(或同步随动)、 远距离测量、 伺服机构的远距离控制等情况时, 理所当然应选用自整角机。 在选择自整角机时, 必然牵扯到自整角机本身的技术数据以及在选用中应注意的一些问题, 以下分别介绍。
4.空载电流和空载功率 空载电流和空载功率是指副边空载时, 励磁绕组的电流和消耗的功率。 例如“36ZKF01”的空载电流为92 mA; 空载功率不大于2 W。 5.开路输入阻抗 它是指副边开路, 从原边(即励磁端)看进去的等效阻抗。 对于发送机和接收机是指定子绕组开路, 从励磁绕组两端看进去的阻抗; 对于ZKB是指输出绕组开路, 从定子绕组两端看进去的阻抗。 例如“36ZKF01”的开路输入阻抗为1.25 kΩ。
图 5 - 25 火炮相对于罗盘方位角的控制原理图
5.5 力矩式自整角机的运行
5.5.1 力矩式自整角机的工作原理 ZLF-ZLJ的工作原理如图 5 - 26 所示。 图中这一对力矩式自整角机的结构参数、 尺寸等完全一样。 我们假定图 5 - 26中ZLF的转子励磁绕组轴线位置, 是当两机加励磁后, 由原来与ZLJ转子轴线相同的位置人为地逆时针方向旋转δ角的位置, 当忽略磁路饱和时, 我们可分别讨论ZLF和ZLJ单独励磁的作用, 然后进行迭加。
图 5 - 22 随动系统中的ZKF-ZKB
图 5 - 3 雷达俯仰角自动显示系统原理图
5.4 带有“ZKC”的控制式自整角机
自整角机除了作成对(ZKF和ZKB)运行外, 还可在ZKF和ZKB之间再接入控制式差动发送机即ZKC作控制式运行。 其目的是用来传递两个发送轴的角度和或角度差。
自整角机(第5章)
控制电机
6 接收机定子产生的合成脉振磁场轴线与输出 绕组轴线夹角为 。 o 5 自整角机控制式运行时, = 2 - 1 = 90 的位 置定义为协调位置。协调时,输出电势E0= 0。相 对协调位置的转角 叫做失调角或差角。 6 输出绕组的电势是变压器电势,其有效 值E0= E0max sin ,在小失调角时,可认为 E0= E0max 3
D’2
E0max是定子合成磁 场轴线与输出绕组轴 D’3线重合时的感应电势, 此时达到最大。
控制电机
自整角发送机的激磁电压是一定的,一对自 整角机的参数一定,因而E0max是一个常数。
E0 1 Z’1 2
Z’2
变压器输出绕组电势的有效值 与两转轴的差角 的余弦成正 比。 E0= E0max cos
~Uj 1 Z1 Z’1 E0 2 Z’2
E1 = E cos1 o E2 = Ecos (1 +120 ) o E3 = E cos (1 +240 )
I1 = I cos1 I2 = I cos (1 +120 ) I3 = I cos (1 +240 )
o o
Z2 D1
E 2
实际上,由于结构和工艺上的各种因素,即 使在协调位置 = 0 输出绕组中仍有电压U0存在。
D’1
B’
一般情况下,这个 电压U0的相位和基本 输出电压U0不一致。
1
Z’1
协调位置
=0
控制电机
U U 0
' 0
U
'' 0
第一个分量 U 将引起转角的 随动误差。这个误差用 表示。 '' 第二个分量称 U0为正交分量,它不能 引起转角的随动误差,但它使放大器和系统 B’ D’1 的工作恶化。
第3章 自整角机
x轴方向和y轴方向的总磁势的瞬时值
f FX ( FF 1 X FF 2 X FF 3 X ) sin t Fm [cos 2 1 cos 2 (1 120) cos 2 (1 120)] sin t f Fy 3 Fm sin t 2 ( FF 1 y FF 2 y FF 3 y ) sin t Fm [cos 1 sin 1 cos(1 120) cos1 120
3.3.1.1 整步绕组的电势、电流
发送机定子绕组感应电势
E F 1 E m cos 1 E F 2 E m cos(1 120) E F 3 E m cos(1 120)
接收机定子绕组感应电势
E J 1 E m cos 2 E J 2 E m cos( 2 120) E J 3 E m cos( 2 120)
I —— 相电流的最大有效值,I= Em / 2Z;
3.3.1.2 磁势
每相的磁势幅值分别为
FJ 1 F (cos 1 cos 2 ) FJ 2 F [cos(1 120) cos( 2 120)] FJ 3 F [cos(1 120) cos( 2 120)]
在x轴(d轴)及y轴(q轴)上的分量合成分别为
FJx FJ 1 cos 2 FJ 2 cos( 2 120) FJ 3 cos( 2 120) FJy FJ 1 sin 2 FJ 2 sin( 2 120) FJ 3 sin( 2 120)
3.2 控制式自整角机
在随动系统中广泛采用了由伺服机构和控制式自整 角机组合的结构
• 控制式自整角机的工作原理 • 带有差动发送机的控制式自整角机的工 作原理
chap05_自整角机
5.自整角机
1 2 sin Ea E2 A E1 A 2 E sin 2 2 1 2 120 sin Eb E2 B E1B 2 E sin 2 2 1 2 120 sin Ec E2C E1C 2 E sin 2 2
每相电流
E1a E Ia cos 1 I cos 1 2Z 2Z E2 b Ib I cos1 120 2Z E2 c Ic I cos1 120 2Z
5.自整角机
自整角变压器整步绕组磁势 4 4 F2 a 2I aWk w 2IWk w cos 1 F mcos 1 4 F2 b 2I bWk w Fm cos1 120 4 F2 c 2I cWk w Fm cos1 120 合成磁势幅值 合成磁动势位置
5.自整角机
发送机整步绕组磁势 4 4 1 2 F1a 2I aWk w 2IWk w sin sin 2 2 4 4 1 2 F1b 2I bWk w 2IWk w sin 120 sin 2 2 4 4 1 2 F1c 2I cWk w 2IWk w sin 120 sin 2 2
5.自整角机
A
T
A Ff
2
q-axis
1
F2
T
C F1 B
R
C
90
负载 d-axis 减速器 Motor
B
相敏整流
放大器
控制式自整角机(转子预转90度)
5.自整角机
此时的输出电压
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第3章 步进电动机
图 5 - 26 力矩式自整角机的工作原理图
第3章 步进电动机
图 5 – 27 载流线圈在合成磁场中所受到的力矩
第3章 步进电动机
图 5 - 22 随动系统中的ZKF-ZKB
第3章 步进电动机
图 5 - 3 雷达俯仰角自动显示系统原理图
第3章 步进电动机
5.4 带有“ZKC”的控制式自整角机
自整角机除了作成对(ZKF和ZKB)运行外, 还可在 ZKF和ZKB之间再接入控制式差动发送机即ZKC作控
制式运行。 其目的是用来传递两个发送轴的角度 和或角度差。
第3章 步进电动机
6.短路输出阻抗 它是指原边(励磁端)短路, 从副边绕组两端看进去 的阻抗值。 例如“36ZKF01”的短路输出阻抗为不大于 150 Ω。 7.副边绕组两端看进 去的阻抗。 例如“12ZKF02”的开路输出阻抗为60 Ω。
第3章 步进电动机
第3章 步进电动机
图 5 - 11 控制式自整角机的原理电路图
第3章 步进电动机
图 5 - 16 定子绕组中的电流
第3章 步进电动机
图 5 - 18 定子磁场的合成和分解
第3章 步进电动机
图 5 - 19 控制式自整角发送机、 变压器的定子合成磁场
第3章 步进电动机
以上所分析的内容就是控制式自整角机的工作原理。 简单归纳如下:
第3章 步进电动机
图 5 - 24 ZKF-ZKC-ZKB的工作原理
第3章 步进电动机
此磁场作为ZKB的励磁磁场, 它与输出绕组轴线的夹角
为90°-(θ1-θ2), 因此, 输出电势为 E2=E2max cos[90°-(θ1-θ2)]
=E2max sin(θ1-θ2)
(5 - 14)
第3章 步进电动机
5.6.1 自整角机的型号和技术数据 1.型号 选择某自整角机时, 一定要注意到该电机铭牌上的
型号, 根据型号就可大体了解这台电机的运行方式和尺 寸大小。 例如:
某一自整角机型号为“36ZKF01” 另一自整角机型号为“28ZKB02” 再一自整角机型号为“70ZLJ01”。
第3章 步进电动机
2.励磁电压 它是加在励磁绕组上的电压。 对于ZKF、 ZLF、 ZLJ而言, 励磁绕组就是转子绕组; 而对于ZKB, 励磁绕 组是相当于这里的定子绕组, 则励磁电压是指加在定子 绕组上的最大线电压, 其数值与所对接的ZKF定子绕组 的最大线电压一致, 例如“36ZKF01”的励磁电压为115 V。
4.空载电流和空载功率 空载电流和空载功率是指副边空载时, 励磁绕组的 电流和消耗的功率。 例如“36ZKF01”的空载电流为92 mA; 空载功率不大于2 W。 5.开路输入阻抗 它是指副边开路, 从原边(即励磁端)看进去的等效 阻抗。 对于发送机和接收机是指定子绕组开路, 从励磁 绕组两端看进去的阻抗; 对于ZKB是指输出绕组开路, 从定子绕组两端看进去的阻抗。 例如“36ZKF01”的开 路输入阻抗为1.25 kΩ。
第3章 步进电动机
3. 最大输出电压 它是指额定励磁时自整角机副边的最大线电压。 例如“36ZKF01”的最大输出电压为90 V。 对于发送机 和接收机均指定子绕组的最大线电势; 对于ZKB, 则指 转子输出绕组的最大电势, 此时它的定子绕组连接如图 5 - 32或图 5 - 33所示。
第3章 步进电动机
此课件下载可自行编辑修改,供参考! 感谢您的支持,我们努力做得更好!
(5 - 15)
第3章 步进电动机
图 5 - 28 整步转矩与失调角的关系
第3章 步进电动机
图 5 - 29为测量水塔内水位
第3章 步进电动机
5.6 自整角机的选用和技术数据
在自动控制系统中, 如果遇到要求能够“自动跟 随”(或同步随动)、 远距离测量、 伺服机构的远距离 控制等情况时, 理所当然应选用自整角机。 在选择自整 角机时, 必然牵扯到自整角机本身的技术数据以及在选 用中应注意的一些问题, 以下分别介绍。
(1) ZKF的转子绕组产生的励磁磁场是一个脉振磁场, 它在发送机定子绕组中感应变压器电势。 定子各相电 势时间上同相位, 其有效值与定、 转子间的相对位置有 关。
(2) ZKF定子合成磁场的轴线与转子励磁磁场的轴 线重合, 但方向恰好相反。
(3) ZKF和ZKB的定子三相绕组对应联接, 两机定子 绕组的相电流大小相等、 方向相反,因而两机定子合成 磁场相对自己定子绕组位置的方向也应相反。
第3章 步进电动机
5.5.2 力矩式自整角机的失调角和协调位置
力矩式自整角机的接收机ZLJ转子在失调时能产生 转矩T来促使转子和发送机ZLF转子协调, 这个转矩是 由电磁作用产生的, 我们称之为整步转矩。 由于磁密 Bq=B sinδ起了关键作用, 故整步转矩与sinδ成正比, 即
T=KB sinδ
第3章 步进电动机
5.6.1 自整角机的型号和技术数据 1.型号 选择某自整角机时, 一定要注意到该电机铭牌上的
型号, 根据型号就可大体了解这台电机的运行方式和尺 寸大小。 例如:
某一自整角机型号为“36ZKF01” 另一自整角机型号为“28ZKB02” 再一自整角机型号为“70ZLJ01”。
第3章 步进电动机
第3章 步进电动机
(4) ZKB的输出电势的有效值E2=E2max sinγ, 其中γ叫 失调角。 失调角γ=90°-δ,γ角 是实际ZKB转子绕组轴 线(从Z2′到Z1′方向)偏移(超前)协调位置( 方向)的Xt 角 度(取正号)(图 5 - 20 所示)。 协调位置为输出电势等于 零的位置。 在失调角比较小时, U 2=U 2max γ, 这里γ的 单位取弧度(rad)。
图 5 - 25 火炮相对于罗盘方位角的控制原理图
第3章 步进电动机
5.5 力矩式自整角机的运行
5.5.1 力矩式自整角机的工作原理 ZLF-ZLJ的工作原理如图 5 - 26 所示。 图中这一
对力矩式自整角机的结构参数、 尺寸等完全一样。 我们假定图 5 - 26中ZLF的转子励磁绕组轴线位置,