第9讲 自适应线性元件
《自适应滤波器原理》课件
自适应滤波器原理:通过调整滤波 器的参数,使滤波器的输出接近期 望输出
减小稳态误差的方法:调整滤波器 的参数,使其更接近期望输出
添加标题
添加标题
添加标题
添加标题
稳态误差:滤波器在稳态条件下的 输出误差
性能优化:通过减小稳态误差,提 高自适应滤波器的性能
调整滤波器参数,如调整滤波 器阶数、调整滤波器系数等
军事领域:用于 雷达信号处理, 提高探测精度
工业领域:用于 机器故障诊断, 提高生产效率
深度学习算法:利用神经网络进行自适应滤波 强化学习算法:通过强化学习实现自适应滤波器的优化 遗传算法:利用遗传算法进行自适应滤波器的参数优化 模糊逻辑算法:利用模糊逻辑进行自适应滤波器的决策和控制
FPGA实现:利用FPGA的灵活性和并行性,实现自适应滤波器 ASIC实现:利用ASIC的高性能和低功耗,实现自适应滤波器 专用芯片实现:设计专用芯片,实现自适应滤波器 云计算实现:利用云计算平台的计算资源,实现自适应滤波器
特点:全局搜索能力强,收 敛速度快
原理:通过模拟鸟群觅食行 为,寻找最优解
应用:广泛应用于自适应滤 波器、神经网络等领域
优缺点:优点是简单易实现, 缺点是容易陷入局部最优解
采用快速傅里叶变 换(FFT)算法, 减少计算量
利用并行计算技术, 提高计算速度
采用稀疏矩阵算法 ,减少存储需求
采用低复杂度算法 ,如LMS算法,减 少计算量
挑战:如何提高自适应滤波器的性能和稳定性,降低成本,提高可靠性,以及如何应对新的应 用场景和需求。
汇报人:
,
汇报人:
01
02
03
04
05
06
添加标题
自适应滤波器:一种能够根据输入信号的变化自动调整滤波器参数 的滤波器
(word完整版)自适应滤波器原理-带图带总结word版,推荐文档

第二章自适应滤波器原理2.1 基本原理2.1.1 自适应滤波器的发展在解决线性滤波问题的统计方法中,通常假设已知有用信号及其附加噪声的某些统计参数(例如,均值和自相关函数),而且需要设计含噪数据作为其输入的线性滤波器,使得根据某种统计准则噪声对滤波器的影响最小。
实现该滤波器优化问题的一个有用方法是使误差信号(定义为期望响应与滤波器实际输出之差)的均方值最小化。
对于平稳输入,通常采用所谓维纳滤波器(Wiener filter)的解决方案。
该滤波器在均方误差意义上使最优的。
误差信号均方值相对于滤波器可调参数的曲线通常称为误差性能曲面。
该曲面的极小点即为维纳解。
维纳滤波器不适合于应对信号和/或噪声非平稳问题。
在这种情况下,必须假设最优滤波器为时变形式。
对于这个更加困难的问题,十分成功的一个解决方案使采用卡尔曼滤波器(Kalman filter)。
该滤波器在各种工程应用中式一个强有力的系统。
维纳滤波器的设计要求所要处理的数据统计方面的先验知识。
只有当输入数据的统计特性与滤波器设计所依赖的某一先验知识匹配时,该滤波器才是最优的。
当这个信息完全未知时,就不可能设计维纳滤波器,或者该设计不再是最优的。
而且维纳滤波器的参数是固定的。
在这种情况下,可采用的一个直接方法是“估计和插入过程”。
该过程包含两个步骤,首先是“估计”有关信号的统计参数,然后将所得到的结果“插入(plug into)”非递归公式以计算滤波器参数。
对于实时运算,该过程的缺点是要求特别精心制作,而且要求价格昂贵的硬件。
为了消除这个限制,可采用自适应滤波器(adaptive filter)。
采用这样一种系统,意味着滤波器是自设计的,即自适应滤波器依靠递归算法进行其计算,这样使它有可能在无法获得有关信号特征完整知识的环境下,玩完满地完成滤波运算。
该算法将从某些预先确定的初始条件集出发,这些初始条件代表了人们所知道的上述环境的任何一种情况。
我们还发现,在平稳环境下,该运算经一些成功迭代后收敛于某种统计意义上的最优维纳解。
自适应线性元件

3.1自适应线性神经元模型和 结构
图5. 1 自适应线性神经网络的结构
3.2 W-H学习规则
W—H学习规则是由威德罗和霍夫提出的用 来修正权矢量的学习规则
采用W—H学习规则可以用来训练一定网络 的权值和偏差使之线性地逼近一个函数 式而进行模式联想(Pattern Association)。
防止产生振荡现象。 1 自适应பைடு நூலகம்性神经网络的结构
(5. 3)
由威德罗(Widrow)和霍夫(Hoff)首先提出的
在一般的实际运用中,实践表明,η通常取一接近1的数,或取值为:
它采用的是W—H学习法则,也称最小均方差(LMS)规则对权值进行训练
感知器和自适应线性网络而言,结构上的主要区别在
3.2 W-H学习规则
定义一个线性网络的输出误差函数为:
我们的目的是通过调节权矢量,使E(W,B)达到最小值。 所以在给定E(W,B)后,利用W—H学习规则修正权矢量 和偏差矢量,使E(W,B)从误差空间的某一点开始,沿 着E(W,B)的斜面向下滑行。
感知器仅能够进行简单的分类。
(1)网络模型结构上
3(1.)网2络W模-型H学结习构规上根则 据梯度下降法,权矢量的修正值正比于当前位
3)学习:采用W—H学习规则计算新的权值和偏 差,并返回到1)。
3.4对比与分析
感知器和自适应线性网络 (1)网络模型结构上
感知器和自适应线性网络而言,结构上的主要区别在 激活函数:一个是二值型的,一个线性的。
当把偏差与权值考虑成一体时,自适应线性网络的输 与输出之间的关系可以写成A=W*P。如果P是满秩 话,则可以写成AP-1=W,或W=A/P。
第9讲 自适应线性元件

9.1自适应线性神经元模型和结构
这个神位元有一个线性激活函数, 被称为Adaline.
9.2W-H 学习规则
W-H 学习规则是由威德罗和霍壳提出的用来 修正权矢量的学习规则. 采用W-H 学习规则可 以用来训练一层网络的权值和偏差使之线性地 逼近一个函数式而进行模式联想( Pattern Association ) . 定义一个线性网络的输出误差函数为
• 例3. P = [1.0 1.5 3.0 -1.2]; T = [0.5 1.1 3.0 -1.0] 此时,所要解决的问题相当于用四个方程解w 和b 两个未知数. 因为 方程数大于未知数,所以用代数方程是无解的. 但仍可以用自适应 线性网络来对此问题求解. – 由上面的例于可以看出,自适应线性网络仅可以学习输入/输出矢 量之间的线性关系,所以对某些问题, 自适应线性网络是不能得 到满意的结果的. 然而, 当一个完美的结果不存在,但只要选择 足够小的学习速率,自适应线性网络将总是可以使其误差平方和 为最小。网络对其给定的结构, 总可得到一个尽可能接近目标的 结果. 这是因为一个线性网络的误差表面是抛物线型的,既然抛物 线只有一个最小值,基于梯度下降法的W-H 规则肯定在其最小值 处产生结果.
通常取一接近1的数或取值为wh学习规则的函数为learnwhm来实现另外加上线性自适应网络输出函数purelinm可以写出wh学习规则的计算程序learnwhbones1q采用wh规则训练自适应线性元件使其能够得以收敛的必要条件是被训练的输入矢量必须是线性独立的且应适当地选择学习速率以防止产生振荡现象
• R=3,s=4,q=4
• • • • • • • • •
• • • • • • • • • • • • •
% wf2.m clear; P = [1 1.5 1.2 -0.3; -1 2 3 -0.5;2 1 -1.6 0.9]; T = [0.5 3 -2.2 1.4 ; 1.1 -1.2 1.7 -0.4 ;3 0.2 -1.8 -0.4; -1 0.1 -1.0 0.6]; [S,Q]=size(T); max_epoch=100; err_goal =0.001; lr = 0.9 *maxlinlr(P); W0 = [ 1.9978 -0.5959 -0.3517; 1.5543 0.05331 1.3660;1.0672 0.3645 -0.9227; 0.7747 1.3839 -0.3384]; B0 = [0.0746; -0.0642;-0.4256;-0.6433]; net=newlin(minmax(P),S,[0],lr); net.iw{1,1}=W0; net.b{1}=B0; A=sim(net,P); e=T-A; SSE= (sumsqr(e))/(S*Q); fprintf('Before training, sum squrared error=%g.\n',SSE); net.trainParam.epochs=400; net.trainParam.goal=0.001; [net tr]=train(net,P,T); W=net.iw{1,1} B=net.b{1}
自适应线性自抗扰控制器的设计

自适应线性自抗扰控制器的设计奚静思;刘品宽;丁汉【摘要】自抗扰控制器对于抑制不确定的扰动有良好的效果,但其控制器参数较多且整定困难.为了实现自适应的线性自抗扰控制器,对线性自抗扰控制器的参数整定策略展开了研究.首先,设计了基于观测误差的线性扩张观测器参数自适应整定算法.接着,设计了自抗扰控制器线性反馈环节的参数的自适应整定算法.最后,利用李雅普诺夫方法,证明上述自适应整定算法得到的参数可以保证扩张状态观测器的观测误差和被控系统最终输出误差都收敛至零.实验结果表明:精密气浮运动平台低速工况下,自适应线性自抗扰控制器的参数在0.8s内即可迅速完成整定计算;线性扩张观测器观测误差绝对值小于2 nm;被控精密气浮运动平台的速度波动不大于5%.自适应线性自抗扰控制器实现了控制器参数在线整定,控制器的性能表现满足要求.【期刊名称】《光学精密工程》【年(卷),期】2018(026)007【总页数】9页(P1749-1757)【关键词】自抗扰控制;自适应控制;参数整定;直线电机【作者】奚静思;刘品宽;丁汉【作者单位】上海交通大学机械与动力工程学院 ,上海200240;上海交通大学机械与动力工程学院 ,上海200240;上海交通大学机械与动力工程学院 ,上海200240【正文语种】中文【中图分类】TP394.1;TH691.91 引言针对不确定系统的控制器设计是自动控制研究领域的重要组成部分。
自抗扰控制器(Active Disturbance Rejection Controller, ADRC)抗干扰性能好且控制器结构简单[1-3],近年来已被广泛研究和应用于诸多领域[4-10]。
其特点是通过扩张状态观测器实时、主动地估计和补偿总的不确定性(或总干扰),并利用反馈控制器将所有的不确定干扰在系统中整合补偿[11-12]。
然而,传统的自抗扰控制器中包含了很多非线性元件,其参数整定过程十分复杂,成为自抗扰控制算法被广泛应用的主要障碍。
线性元件

线性元件:
在电子电路中,线性元件是一种电子元件,与电流和电压有线性的关系。
电阻是最普遍的线性元件范例,其他的例子如电容、电感、变压器和运算放大器。
线性元件是指输出量和输入量具有正比关系的元件.例如在温度不变的情况下金属电阻元件的两端电压同电流的关系就可以认为是线性的.电子元器件具有这种关系的很多.质量差的元器件会出现"线性失真".非线性元器件其输入输出不呈"线性"关系.
当信号通过一个元器件后,信号的波形没有改变,我们就称之为线性器件;比如电阻、电容。
当信号通过一个元器件后,信号的波形被改变了,我们就称之为非线性器件;比如二极管,交流信号通过它以后,只剩下半边了。
线性电路与非线性电路也是这样;当信号通过一个电路后,信号的波形没有改变,我们就称之为线性电路;当信号通过一个电路后,信号的波形被改变了,我们就称之为非线性电路。
即输入值与输出值的函数曲线为直线,就是我们所说的线性;否则就是非线性。
《自适应信号处理》课件

自适应信号处理技术可用于雷达跟踪系统,通过实时调整滤波器参数,提高目标跟踪的准确性和稳定性。
雷达在复杂环境中工作时,常常受到杂波干扰,自适应信号处理能够自适应地调整滤波器,有效抑制杂波干扰,提高目标检测能力。
杂波抑制
雷达跟踪
超声成像
在医学超声成像中,自适应信号处理能够优化图像质量,提高分辨率和对比度,有助于医生准确诊断。
优化算法性能
通过简化算法、采用低精度计算等方法,降低计算成本,提高算法的实用性。
降算法在某些情况下可能会出现不稳定的现象,如收敛速度过快或发散等。
改进稳定性
可以采用约束条件、正则化方法等手段,提高算法的稳定性,保证算法能够可靠地处理各种信号。
动态调整参数
根据信号的特性和处理需求,动态调整算法的参数,以获得更好的处理效果。
02
快速收敛
RLS算法具有快速收敛的特点,适用于实时处理和快速变化的环境。
自适应偏置消除
APA算法通过自适应偏置消除技术,提高了算法的稳定性和收敛速度。
性能优化
APA算法在某些情况下可以获得更好的性能表现,尤其是在处理非线性信号时。
计算复杂度
APA算法的计算复杂度相对较高,需要更多的计算资源和存储空间。
01
02
03
自适应信号处理算法
最小均方误差
LMS算法是一种最小均方误差算法,通过不断调整滤波器系数,使得输出信号与期望信号之间的误差的均方值最小化。
03
计算复杂度
RLS算法的计算复杂度较高,需要更多的计算资源和存储空间。
01
递归最小二乘法
RLS算法采用递归最小二乘法,通过迭代更新滤波器系数,使得输出信号与期望信号之间的误差的平方和最小化。
线性元件和非线性元件
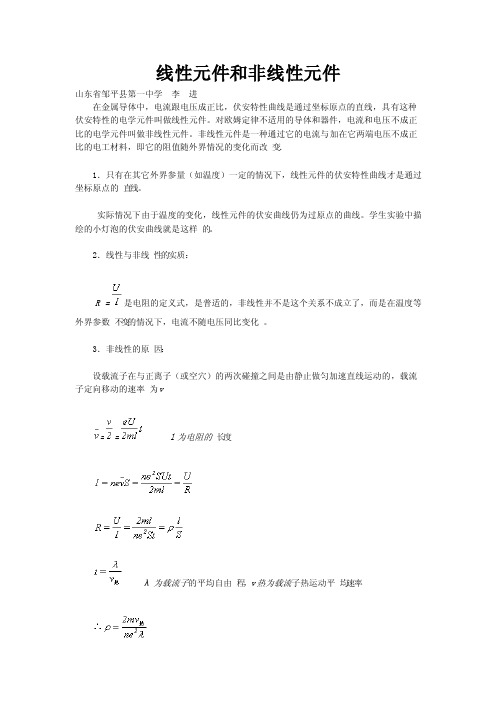
线性元件和非线性元件山东省邹平县第一中学李进在金属导体中,电流跟电压成正比,伏安特性曲线是通过坐标原点的直线,具有这种伏安特性的电学元件叫做线性元件。
对欧姆定律不适用的导体和器件,电流和电压不成正比的电学元件叫做非线性元件。
非线性元件是一种通过它的电流与加在它两端电压不成正比的电工材料,即它的阻值随外界情况的变化而改变.1.只有在其它外界参量(如温度)一定的情况下,线性元件的伏安特性曲线才是通过坐标原点的直线。
实际情况下由于温度的变化,线性元件的伏安曲线仍为过原点的曲线。
学生实验中描绘的小灯泡的伏安曲线就是这样的。
2.线性与非线性的实质:R =是电阻的定义式,是普适的,非线性并不是这个关系不成立了,而是在温度等外界参数不变的情况下,电流不随电压同比变化。
3.非线性的原因:设载流子在与正离子(或空穴)的两次碰撞之间是由静止做匀加速直线运动的,载流子定向移动的速率为v==l为电阻的长度λ为载流子的平均自由程,v热为载流子热运动平均速率对于线性元件,在温度一定的情况下,载流子体密度n,载流子热运动平均速率v热,载流子的平均自由程λ均为定值,ρ、R为定值,因此I与U的正比关系成立。
对于非线性元件,影响载流子体密度n的因素不仅仅是温度,外加电场的强度也会影响载流子的数量(如气体导电过程,随着电压的增大,越来越多的空气分子被电场力“撕裂”成离子,成为载流子),因此即便在温度一定的情况下,I与U的正比关系也是不成立的。
公式也可以用来解释半导体与金属导体的导电特性的差异。
对金属导体,温度升高后,λ减小(正离子运动加剧)、v热增大,n几乎不变(由于金属正离子结构稳定,自由电子浓度受电场影响极小),电阻率升高,电阻增大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这个简单的例题存在一个精确解, 且可以用解二元一次方程的方式将P 和T 值分别对应地代人方程T= W*P+B 得
可解出e=T-A=0 的解为 W = -0.2273; B = 0.7273 由此看出,对于特别简单的问题,采用自适应线性网络的训练不一定能够 得到足够精确的解. 因为当训练误差达到期望误差值后,训练即被终止.
• • • • • • • • • • • • • •
%训练权值 disp_freq=1; max_epoch=30; err_goal=0.001; if LR==1 lp.lr=1.7*maxlinlr(P,'bias'); else lp.lr=2.5*maxlinlr(P,'bias'); end a=W*P+B; A=purelin(a); E=T-A; SSE=sumsqr(E); errors=[SSE];
• 例4.以不同的学习速率训练网络 • 结论:应选择较小的学习速率以保证网络 收敛。
• • • • • • • • • • • • •
%wf4.m clear; P=[1 -1.2]; T=[0.5 1]; [R,Q]=size(P); [S,Q]=size(T); [W,B]=rands(S,R); %画误差曲面图 Wrange=-2:0.2:2; Brange=-2:0.2:2; ES=errsurf(P,T,Wrange,Brange,'purelin'); mesh(ES,[60,30]); pause;
• R=3,s=4,q=4
• • • • • • • • •
• • • • • • • • • • • • •
% wf2.m clear; P = [1 1.5 1.2 -0.3; -1 2 3 -0.5;2 1 -1.6 0.9]; T = [0.5 3 -2.2 1.4 ; 1.1 -1.2 1.7 -0.4 ;3 0.2 -1.8 -0.4; -1 0.1 -1.0 0.6]; [S,Q]=size(T); max_epoch=100; err_goal =0.001; lr = 0.9 *maxlinlr(P); W0 = [ 1.9978 -0.5959 -0.3517; 1.5543 0.05331 1.3660;1.0672 0.3645 -0.9227; 0.7747 1.3839 -0.3384]; B0 = [0.0746; -0.0642;-0.4256;-0.6433]; net=newlin(minmax(P),S,[0],lr); net.iw{1,1}=W0; net.b{1}=B0; A=sim(net,P); e=T-A; SSE= (sumsqr(e))/(S*Q); fprintf('Before training, sum squrared error=%g.\n',SSE); net.trainParam.epochs=400; net.trainParam.goal=0.001; [net tr]=train(net,P,T); W=net.iw{1,1} B=net.b{1}
• • • • • • • • • • • • • • • • •
%wf1.m P=[1 -1.2]; T=[0.5 1]; [R,Q]=size(P); [S, Q] = size (T); lr=0.4*maxlinlr(P); net=newlin(minmax(P),S,[0],lr); net.inputWeights{1,1}.initFcn='rands'; net.biases{1}.initFcn='rands'; net=init(net); W0=net.iw{1,1} B0=net.b{1} net.trainParam.epochs=20; net.trainParam.goal=0.001; [net tr]=train(net,P,T); W=net.iw{1,1} B=net.b{1}
• 例3. P = [1.0 1.5 3.0 -1.2]; T = [0.5 1.1 3.0 -1.0] 此时,所要解决的问题相当于用四个方程解w 和b 两个未知数. 因为 方程数大于未知数,所以用代数方程是无解的. 但仍可以用自适应 线性网络来对此问题求解. – 由上面的例于可以看出,自适应线性网络仅可以学习输入/输出矢 量之间的线性关系,所以对某些问题, 自适应线性网络是不能得 到满意的结果的. 然而, 当一个完美的结果不存在,但只要选择 足够小的学习速率,自适应线性网络将总是可以使其误差平方和 为最小。网络对其给定的结构, 总可得到一个尽可能接近目标的 结果. 这是因为一个线性网络的误差表面是抛物线型的,既然抛物 线只有一个最小值,基于梯度下降法的W-H 规则肯定在其最小值 处产生结果.
• 线性网络具有抛物线型误差函数所形成的 误差表面,所以只有一个误差最小值。通 过W-H 学习规则来计算权值和偏差的变化 并使网络误差的平方和最小化,且能够训 练一个网络的误差趋于这个最小值.
根据梯度下降法,权矢量的修正值正比于当前位置上E(W,B)的 梯度, 对于第i个输出节点有
η为学习速率. η 通常取一接近1 的数,或取值为
9.5对比与分析
• 感知器和自适应线性网络这两类网络在其结构和学习算法 上都没有什么太大的差别,不过就是从它们细小的区别上, 能够看到它们之间功能的不同点,而这些不同点在其它各 种神经网络中表现得更加突出。 • ( 1 )网络模型结构 • 一种网络有一种结构. 感知器和自适应线性网络 几乎具有 相同的结构,但其他网络如Hopfield网络就完全是另外种 结构. • 就感知器和自适应线性网络而言,结构上的主要区别在于 激活函数一个是二值型的,一个线性的。 仅此点,就使 得感知器仅能做简单的分类工作,而自适应线性网络除了 有分类功能外,还可以进行线性逼近。当输入与输出之间 是非线性关系时,通过对网络的训练, 可以得出线性逼 近关系。
W.H 学习规则的函数为learnwh.m 来实现, 另外,加 上线性自适应网络输出函数purelin.m ,可以写出W-H 学习规则的计算程序 A =purelin(W*P+B); E=T- A; dW = learnwh ([],P,[] ,[] ,[] ,[],E, [] ,[] ,[],lr,[]); dB = learnwh (B,ones(1,Q) ,[] ,[] ,[] ,[], E, [] ,[] ,[],lr,[]); W=W +dW: B=B+ dB;
• 同样,利用创建线性网络函数newlin.m,再 利用工具箱中的train.m可以替代上述整个 训练过程。调用 net=newlin(minmax(P),S,[0],lr)时已默认其 权值的学习法则为W-H.
• 例1.设计自适应线性网络实现从输入矢量到 输出矢量的变换关系.其输入矢量和输出矢 量分别为:P = [1.0 -1.2]; T= [0.5 1.0] • 解:用自适应线性网络求解问题时,设计者 要确定期望误差值以及最大循环次数.对此 题可分别选0.001和20.
9.1自适应线性神经元模型和结构
这个神位元有一个线性激活函数, 被称为Adaline.
9.2W-H 学习规则
W-H 学习规则是由威德罗和霍壳提出的用来 修正权矢量的学习规则. 采用W-H 学习规则可 以用来训练一层网络的权值和偏差使之线性地 逼近一个函数式而进行模式联想( Pattern Association ) . 定义一个线性网络的输出误差函数为
• 对于具有零误差的自适应线性网络,即输 入输出矢量对存在着严格的线性关系,此 时的自适应线性网络的设计可以采用工具 箱中newlind.m 的函数. • net=newlind(P,T); • W=net.iw{1,1} • B=net.b{1} • 可立即得到精确解 • 然后可用sim.m来检测所设计的网络: • A=sim(net,P) • SSE=sumsqr(T-A);
• • • • • • • • • • • • • • • • • • • • • • •
for epoch=1:max_epoch if SSE<err_goal epoch=epoch-1; break end LW=W;LB=B; dw=learnwh([],P,[],[],[],[],E,[],[],[],lp,[]); db=learnwh(B,ones(1,Q),[],[],[],[],E,[],[],[],lp,[]); W=W+dw;B=B+db; a=W*P+B; A=purelin(a); E=T-A;SSE=sumsqr(E); errors=[errors SSE]; if rem(epoch,disp_freq)==0 plot([LW W],[LB B],'r--'); drawnow end end hold off figure(3); m=W*P+B; a=purelin(m); plot(errors);
第二篇 神经网络
7.神经网络简介 8.感知器 9.自适应线性元件 10.反向传播网络
9 自适应线性元件
自适应线性元件(Adaptive Linear Element, 简称 Adaline )也是早期神经网络模型之一,它与感知器的 主要不同之处在于其神经元有一个线性激活函数, 这 允许输出可以是任意值, 而不仅仅只是像感知器中那 样只能取0或1. 另外它来用的是W-H 学习法则, 也称最小均方差 (LMS)规则对权值进行训练, 从而能够得到比感知器 更快的收敛速度和更高的精度. 自适应线性元件的主要用途是线性逼近一个函数式而 进行模式联想。另外,它还适用于信号处理滤波、预 测、模型识别和控制.
• • • • • • • •
end dW = learnwh ([],P,[] ,[] ,[] ,[],E, [] ,[] ,[],lr,[]); dB = learnwh (B,ones(1,Q) ,[] ,[] ,[] ,[], E, [] ,[] ,[],lr,[]); W=W +dW: B=B+ dB; A=purelin(W*P+B); %网络输出 E=T-A; SSE=sumsqr( E );