基于DSP的永磁同步电机控制系统
基于DSP无轴承永磁同步电机控制系统设计

3 .南 京 西 门子 有 限公 司 , 苏 南 京 江
摘要 : 了控 制 无轴承 永磁 同步 电机的旋 转和 转子 的 稳 定 悬浮 , 为 设计 出 了以 T 3 0 F 4 7 为微 处理 Ms 2 L 2 O A 器核 心的无 轴承 永磁 同步 电机控 制 系统 , 充分利 用 T 3 0 F4 7 的 中断 系统设计 出能 同时控 制 电机 MS 2 L1 0 A 2
无轴 承永磁 同步 电机 的控 制必须 同时实 现转矩 控 制 和径 向力控 制 , 且还 是一个 强实 时控制 系统 , 并 控制 软件不仅 要保 证执 行 过程 和 结 果 的正 确 , 同时 还必 须 保 证在 数字控 制 系统允许 的 时间范 围 内完 成控制 量 的
是通 过控 制气 隙磁场 产 生 的 , 电机 带有 负 载 时转 矩 当 绕组 中 电流 L不 为 0 径 向力绕 组 电流 与径 向力之 间 ,
t l l t mant ru ,h t oio nl i ce kdb E n A 6N . t attecmm n r e r g e ct q e temo rp si ag s h c e yQ P ad C P I T A s h o ad oe co i o o tn e l ,・ Nhomakorabea4 8・
《 测控技 术} 0 0年 第 2 第 9期 21 9卷
基 于 D P无轴 承 永 磁 同 步 电机控 制 系统设 计 S
张
( .南京信息职业技 术学 院 , 1 江苏 南 京
磊 ,李 同华
201 106;
2 04 ) 10 6
2 04 ; .南京航空航天大学 自动化学院 , 106 2 江苏 南京
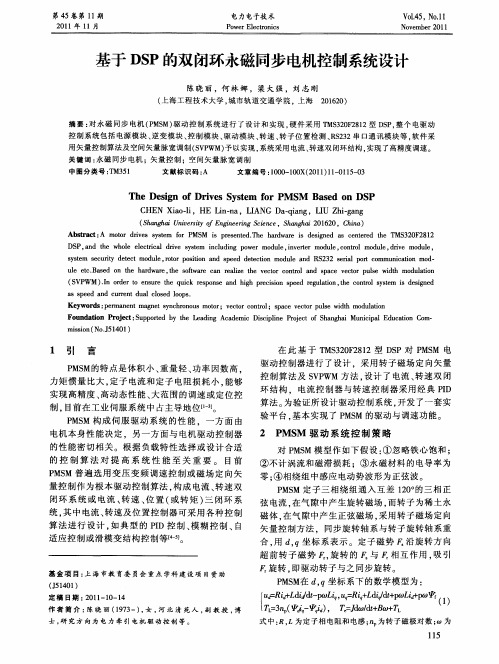
存在 一个 由电机负 载引 起 的 电角 度 , 时 的数 字 控制 此 系统构成 如 图 1所示 。 图中 , 为无 轴承永磁 同步 电动机 角速 度 的命令 值( 单位 为 rd , 子实 际 的角 速度 由光 电编 码 器检 a)转
基于DSP的磁场定向控制永磁同步电动机系统
白 弢 1977年5月生,2002年毕业于清华大学自动化系控制理论与控制工程专业,获硕士学位。
现在北京通信有限责任公司从事自动化控制方面的工作。
控制与保护基于D SP 的磁场定向控制永磁同步电动机系统清华大学(100084) 白 弢 李旭春 李鹤轩 摘要 本文提出了一套基于T I 公司的TM S 320F 240D SP 芯片对永磁同步电动机进行调速以及精确定位的解决方案,利用磁场定向的控制方法设计了一套双闭环调速系统,并介绍了此方法的算法实现。
叙词 D SP 永磁同步电动机 磁场定向控制New Solution Ba sed on D SP for P M S MT singhua U n iversity Ba i Tao ,L i Xuchun ,L i Hexuan Abstract :T h is docum en t p resen ts a so lu ti on to con tro l a p erm anen t m ag 2net synch ronou s m o to r u sing the TM S 320F 240.T he con tro l m ethod p resen tedrelies on the field o rien ted con tro l.W ith th is m ethod ,a system of doub le clo se 2loop on cu rren t and sp eed is p resen ted .T he i m p lem en t of th is con tro l strategy w as elabo rated . Key words :D igital signal p rocesso r Perm anen t m agnet synch ronou s m o 2to r F ield o rien ted con tro l 1 概述电机调速系统一直是电气传动的一个重要方面。
基于DSP的永磁同步电动机控制系统的研究
了开关频 率 ; 自行 设 计 了 自举 驱 动 电 路 , 证 了 保 IB G T能 够 安全 可 靠地 运 行 ; 外 还 设 计 了键 盘 和 此
显 示 电路 , 系统 具 有 良好 的 人机 交互 性 能 . 用 使 采
c语 言进 行 了软 件 设 计 , 实现 了 系 统 速 度 、 电流 双
,
wa e p o r mm ig, o d c se p rm e t lr s a c r rga n c n u t x e i n a e e r h. T e e p rme tlr s lss o t y tm h x e i n a e u t h w he s se h sm a y a a a e u h a niue h r wa e d sg a n dv ntg s s c s u q a d r e in e c le ta t—ne f r n e t c n q e x e ln n ii tre e c e h i u
一
t P M) ss m,an vl MS o t l ytm i it d c d i ti p p r A u l o r( MS yt e oe P M cnr s s nr u e n hs ae os e o do be
.
co e l o o to y t m t u r n nd s e d lo sa p id wih DS a o e0 h y l s d—o p c nr ls se wi c re ta p e o p i p le t P sc r ft e s s hvI4N 3 2 o 0 _。 (8 x 】.
基 于 D P的 永 磁 同步 电 动 机 控 制 系 统 的 研 究 S
基于DSP的双闭环永磁同步电机控制系统设计
1 引 言
P M的特 点是 体 积 小 、 量 轻 、 率 因数 高 . MS 重 功 力 矩 惯 量 比大 , 子 电流 和 定 子 电 阻损 耗 小 . 够 定 能 实 现 高 精 度 、 动 态 性 能 、 范 围 的 调 速 或 定 位 控 高 大 制, 目前 在 工 业 伺 服 系 统 中 占主 导 地 位 [ 1 - P M 构 成 伺 服 驱 动 系 统 的性 能 。一 方 面 由 MS
第4 5卷 第 1 期 1
21 0 1年 1 1月
电 力 电子技 术
P w rE e t n c o e l cr i s o
V1 5 o. ,No1 4 .1
No e e 0 v mb r2 1 1
基于 D P的双 闭环永磁 同步 电机控制系统设计 S
陈 晓 丽 ,何 林 娜 ,梁 大 强 ,刘 志 刚
T e De in o ie y tm o h sg fDrv s S se f r PM S s d o P M Ba e n DS
C HEN Xi o l ,HE L n n a —i i — a,L ANG — i n I Da q a g,L U Z ig n I h —a g
式 中: L为 定子相 电阻和 电感 ; p R, n 为转 子磁 极对数 ; t o为
第4 5卷 第 1 期 1
21 0 1年 1 1月
电力 电子技 术
P we lc r nc o rE e to i s
Vo .5,No 1 1 4 .1 No e e 0 v mb r2 1 1
在 此 基 于 T 30 2 1 MS 2 F 8 2型 D P对 P M 电 S MS
基于DSP的永磁同步电动机直接转矩控制系统研究

cnrl yt r P M bsdo d a cde t d dK l a l r( K )hdbe rp sd o t s m f MS ae na vne x n e am nft E F a enpo oe .A c os e o I e ie na —
A b t a t Ma n y su i d a o tte d r c o q e c n r ls se f ri t ro e ma e tm a n t s n h o sr c : i l t d e b u h ie ttr u o to y tm o n e r p r n n g e y c r — i
卡 尔曼 滤 波 应 用 于 永 磁 同步 电机 转 速 和 转 角 的估 计 ,实 现 将 定 子 磁 链 给 定 值 限 制 在 一 定 范 围 内 , 在基 速 范 围 内通 过 改 变 定 子 磁 链 给 定 幅值 以达 到 最大 转 矩/ 链 运 行 的 目 的。 设 计 的 实 验 平 台 证 磁
P r me e si ai n; Ex e m e t a a tr e t to s m p r i n
0 引 言
18 9 5年 ,德 国学 者 M ・ e e bok率 先 提 出 D p n rc
棒 性 的 自适 应 控 制算 法 。 文 针对 传 统 控 制 策 本
略 对 定 子磁 链 观 测 误 差 较 大 的 缺 陷 ,提 出将 扩 展
cr n l t i ) t faiit advl i eev ri ys ua o n x ei e t u e t i a o .I s ly n a dt w r e f db i l inade pr n. mi t n s e bi i y ie m t m
基于DSP的永磁同步电动机矢量控制系统研究 电气工程及其自动化专业毕业设计 毕业论文

诚信声明本人声明:1、本人所呈交的毕业设计(论文)是在老师指导下进行的研究工作及取得的研究成果;2、据查证,除了文中特别加以标注和致谢的地方外,毕业设计(论文)中不包含其他人已经公开发表过的研究成果,也不包含为获得其他教育机构的学位而使用过的材料;3、我承诺,本人提交的毕业设计(论文)中的所有内容均真实、可信。
作者签名:日期:年月日湖南工程学院毕业设计(论文)任务书————☆————设计(论文)题目:基于DSP的永磁同步电动机矢量控制系统研究姓名周琳系别应用技术学院专业电气工程及其自动化班级0786 学号200713010616指导老师颜渐德教研室主任谢卫才一、基本任务及要求:1)掌握矢量控制的基本原理。
2)掌握永磁同步电动机矢量控制系统。
3)利用MATLAB软件仿真,分析。
4)硬件设计及软件设计二、进度安排及完成时间:2月20日:布置任务,下达设计任务书2月21日——3月10日:查阅相关的资料(总参考文章15篇,其中2篇以上IEEE的相关文章)。
3月13日——3月25日:毕业实习、撰写实习报告3月27日——5月30日:毕业设计、4月中旬毕业设计中期抽查6月1日——6月7日:撰写毕业设计说明书(论文)6月8日——6月10日:修改、装订毕业设计说明书(论文),并将电子文档上传FTP。
6月11日——6月12日:毕业设计答辩目录摘要 (I)ABSTRACT (II)第1章概述 (1)1.1永磁同步电动机的发展概况及应用前景 (1)1.1.1 永磁同步电动机发展概况 (1)1.1.2 永磁同步电动机特点及应用 (2)1.2永磁同步电动机控制系统的发展现状与趋势 (3)1.3课题研究的背景及本文的主要研究内容 (4)1.4本课题的研究意义 (5)第2章永磁同步电动机的结构及其数学模型 (7)2.1永磁同步电动机的结构 (7)2.2永磁同步电动机的数学模型 (8)2.2.1 永磁同步电机在静止坐标系(UVW)上的模型 (8)α-)上的模型方程 (10)2.2.2 永磁同步电机在两相静止坐标系(β2.2.3 永磁同步电机在旋转坐标系(d q-)上的数学模型 (12)第3章永磁同步电机矢量控制及空间矢量脉宽调制 (16)3.1永磁同步电机的控制策略 (16)3.1.1永磁同步电机外同步控制策略 (16)3.1.2 永磁同步电机自同步控制策略 (16)3.1.3 永磁同步电动机的弱磁控制 (19)3.2空间矢量脉宽调制(SVPWM) (19)3.2.1 空间矢量脉宽调制原理 (19)3.2.2 空间矢量脉宽调制实现 (22)3.3PI控制器的设计 (24)3.3.1 电流环PI控制器的设计 (24)3.3.2 速度环PI控制器的设计 (25)第4章系统仿真模型 (26)4.1MATLAB仿真工具箱简介 (26)4.2闭环控制系统仿真 (27)4.3仿真结果及分析 (31)第5章永磁同步电机控制器的硬件设计 (34)5.1功率变换单元的设计 (34)5.1.1 三相桥式主电路 (35)5.1.2 IR2130驱动器 (36)5.1.3 信号隔离电路 (38)5.2检测单元的设计 (38)5.2.1位置检测单元的设计 (38)5.2.2 电流检测电路 (40)5.2.3 电压检测电路 (40)5.3控制器的设计 (41)5.3.1 DSP的特点和资源 (42)5.3.2 系统设计中所用的DSP硬件资源 (43)5.4电平转换 (44)5.5保护电路的设计 (45)5.5.1 过流保护电路 (45)5.5.2 过压保护电路 (46)5.5.3 上电保护电路 (46)5.5.4 系统保护电路 (47)第6章永磁同步电机控制器的软件设计 (48)6.1DSP软件一般设计特点 (48)6.1.1 公共文件目标格式 (48)6.1.2 Q格式表示方法 (49)6.2控制系统软件的总体结构 (50)6.3控制系统子程序设计 (53)6.3.1 位置和速度计算 (53)6.3.2 速度、电流PI控制 (55)6.3.3 电流的采样与滤波 (56)6.3.4 坐标变换软件实现 (58)6.3.5 正余弦值的产生 (58)6.3.6 空间矢量PWM程序 (59)结束语 (60)参考文献 (61)致谢 (62)附录 (63)基于DSP永磁同步电动机矢量控制系统研究摘要:本论文在分析了PMSM的结构、数学模型的基础上采用弧公司专用于电机控制的TMS320F2407A型数字信号处理器作为核心,开发了全数字化的永磁同步电机矢量控制调速系统,主要完成了以下几个方面的工作:(1)本文查阅大量的文献资料,阐述了永磁同步电机的发展概况及应用以及其控制系统的发展现状,讨论了此课题的研究意义。
基于DSP的电梯永磁同步电机的DTC控制系统

稳 调 速 和 实 时 控 制 。 给 出 了 系 统 硬 件 和软 件 设 计 方 案 。
关 键 词 :数 字 信 号 处 理 器 ;永 磁 同 步 电机 ;直 接 转 矩 控 制 ;空 间 电 压 矢 量
中 图分 类 号 :T 2 3 P7 文 献标 识 码 :A 文 章 编 号 :10 — 4 2(0 l 1- 0 8 0 0 9 9 9 2 11 10 2 — 4
的应 用 。
转 矩 的控 制 。
在 D C控 制 过程 中对控 制 策略 快 速响 应 的要 T
求 较 高 ,本 文讨 论 了采用 数 字信 号处 理器 ( i— Dg i
tl in l rc s r a Sg a P oes ,简称 D P o S )作 为 核 心处 理 器 ,
L U Yi ba HEN— u I — io .C Jn
( . a ut fAuo t n, Gu n d n c t n l olg fId s ya dC mmec 1 F c l o tmai y o a g o gVoai a l eo u t n o o C e n r re,Gu n zo 0 a gh u 5 5 0,Chn ; 1 1 ia
D பைடு நூலகம்) T T ,D C控制 是在 定 子坐 标 系下 分 析交 流 电机
的数学 模 型 ,通过 动 态 调整 定 子 磁 链 超 前 或滞 后 转 子 磁 链 的 转 矩 角 来 获 得 所 需 的 转 矩 ,强 调 对 电 机 转 矩 进 行 直 接 控 制 _ ,从 而 对 电 梯 的拽 1 ] 引 电 机 而 言 ,无 论 是 在 动 态 还 是 稳 态 ,都 将 对 电 梯 运 行 的 平 稳 性 及 平 层 精 度 的控 制 转 换 为 对
基于DSP的永磁同步电机控制系统硬件设计

基于DSP的永磁同步电机控制系统硬件设计胡宇;张兴华【摘要】以小功率永磁同步电机(PMSM)为研究对象,结合数字信号处理器TMS320F2812功能特点,给出了一套PMSM驱动控制系统硬件设计方案.详细阐述了功率驱动主电路、反馈信号检测电路以及供电电路的设计,介绍了主要元器件选型和参数计算方法.基于设计的硬件平台,对PMSM调速控制系统进行了测试.试验结果表明,所设计的控制系统硬件设计可靠、性能稳定、控制精度高.%Based on the controlled object of small power permanent magnet synchronous motor (PMSM),combined with the main features of digital signal processor TMS320F2812,an overall hardware design scheme had been put forward for the PMSM drive control system.Design of the power driven main circuit had illustrated,signal detection circuit and power supply circuit in detail,meanwhile introduced the main components selection and parameters calculation method.Based on the designed hardware platform,the control system of PMSM had been performed a functional test.Experimental results showed that the hareware design of control system had good reliability with stable performance and high control precision.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)012【总页数】7页(P19-24,80)【关键词】永磁同步电机;功率驱动主电路;信号检测电路【作者】胡宇;张兴华【作者单位】南京工业大学电气工程与控制科学学院,江苏南京211816;南京工业大学电气工程与控制科学学院,江苏南京211816【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因其体积小、损耗低、功率密度高和效率高等优点,在机械制造、工业控制、航空航天等领域得到广泛应用[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
制 的片 内资 源 。本 文 作者 在简 要叙 述 直接 转矩 控 制 系统
原理 的基 础上 ,提 出 了基 于 T 3 o 2 0 芯片 的永 磁 同 MS 2 F 4 步 电机 D C系统 实现 方案 ,并通 过实 验证 明 了该 方 案的 T 可行 性 和系统 较高 的动静 态性 能 。
维普资讯
第2 0卷 第 1期
20 0 7年 1月
De eo me t& I n v t n o c ie y & ee t c l p o u t v lp n n o ai fma h n r o lcr a r d cs i
机 电产品开簋与刨新
V 1 0 N . o. 。o1 2 J n.0 7 a . 0 2
基于 D P的永磁 同步 电机控制 系统 S
李 铁 ‘
( 连海 事 大 学 ,辽 宁 大 连 大 16 2 ) 10 6
摘
要 :直接 转矩 控制 ( c)是 一种 高性 能 的 电机 控制 方法 , DT 它根据磁 通 和转距 的要 求, 直接 选择 逆 变器 的开 关顺序 , 电机 在 最佳 状 态下运 行 。本 文作 者设 计 了一 套基 于 T 3 0 2 0 DS 芯 片的 永 使 MS 2 F 4 P 磁 同步 电机 直接 转距控 制 系统, 绍 了其原 理 、软 硬件 结构 及 工作流 程 。实验 结果证 明 了设 计方 介
学 家 进 一 步 提 出 。 它 摒 弃 了矢 量 控 制 中解 耦 的控 制 思 想 ,采 用 空 间矢 量 的 概念 ,通 过检 测定 子 电压 和 电流 ,
障信号。
( )短 路保 护 :I M 监 视每 一 个 I B 3 P G T的集 电极 电 流 ,一旦 发现 I T出现 短路 电流 ,则短路保 护 动作 ( GB 通 过 流保护) ( )过热 保 护 :IM 检测 模 块 温 度 ,一 旦 发 现模 块 4 P 温 度 超过 了允许 值 ( 1 。,IM 立 即关 断 下桥 臂 的所 有 1 8) P I B ,直至模 块 温度 降下来 为止 ,并在 整个 过热 期 间封 GT 锁 IB G T的驱动 信号 ,同时通 过 F 0输 出故 障指示 。 ( )欠压 保 护 :IM 检 测 每一 桥 臂 的控 制 电压 ,一 5 P 旦 发 现控 制 电压 在 一定 的 时 间 内 降 到 了允 许 值 IV 以 2 下 ,则 I M 立 即关 断 相应 的 I B , 在 整个 欠 压 期 间 内 P G T并 封锁 I B G T的 驱 动 信 号 。如 果 是 下 桥 臂 发 生 欠 压 保 护 ,
封 锁 IB 的驱 动 信 号 。 如 果是 下 桥臂 I B GT G T发 生 过 电
流 。IM 还 将 通 过 F P 0端 口输 出一 脉 冲宽 度 为 2 ms的故
1 PMS 直 接 转 矩 控 制 理 论 M
直 接 转矩 控 制 (T )作 为 一 种 新 型 的高 性 能 交 流 DC 调 速传 动 控制 技术 ,2 纪 8 O世 O年代 由德 国 和 E本 的科 t
直 接在 定子 坐标 系下 观测 、计 算 和控 制 交流 电机 的磁链
和转 矩 ,将 观测值 与 给定 值 进行 比较 ,其差 值经 滞 环控 制 器调 节得 到相 关 的控 制信 号 ,通 过控 制逆 变器 的开关
直 接转矩 控制 ( 称 D C 简 T )是德 国学 者 M.e ebo k d p n re
D C控制技 术首 先是 在异 步 电动 机控 制 系统 中提 出 和发 T 展 起来 的 。近年 来 ,在永 磁 同步 电机 调 速系 统 中得 到了 广泛 关注 和深入研 究 阁 。
于 18 年 提 出 的一种 新 的电 机控 制 理论 。与传 统 的矢 95 量 控 制 不 同 ,这 种 理论 着 眼于 转 矩 和 磁通 的直 接 控 制 ,
也就是 在维 持磁链 幅值 不变 的情况 下 , 用定子 磁通 定 向 采
2 主 回路硬 件 系统
硬 件 系统 的结 构如 图 1所示 。其 中 .主 回路 硬件 部 分 采 用 智 能型 功 率 模块 I M,该 模 块将 功率 管 I T及 P GB
的方 法 ,通 过 调整定 子磁通 在空 间 的旋 转速 度来 控 制转 矩 ,进 而控 制 电机 的转 速 。 由 于 它 取 消 了旋 转 坐 标变 换 ,因而 具有结 构 简单 、手段 直接 、易 于实现 全数 字化
案 的 可 行 性 和 系 统 的 优 良性 能 。
关键 词 :永磁 同步 电机 ;直接 转 矩控 制 :DS P 中图 分类号 :T 8 M3 文献标 识码 :A 文 章编 号 :10 — 6 3 (0 7 1 13 0 0 2 6 7 2 0 )0 - 5 - 3
0 引 言
( )驱 动 功能 :当输 入 驱动 信号 电平 大 于最 小关 断 1
电压 ( )时 ,功 率开关管 I B 4 V G T关断; 当输入驱动电平
小 于最 大开启 电压 08 .V时 ,功 率 开关 管关 断 。 ( )过 流保 护 :IM 监 视 每 一 个 I B 的集 电极 电 2 P GT 流 ,一 旦 发 现 I T过 电流并 超过 允 许 时间 ( t ) GB 1  ̄ ,则 Os 过 电流保 护立 即关 断 相应 的 I B , G T 并在 故障 时间 内 (m ) 2s
的优点 【 l J 。 T 3 0 2 0 芯 片专 门面 向 电机 控 制领 域 的数 字 信 MS 2 F 4 号处 理 器 ,具有 通 用 D P 的快 速 性 特点 和便 于 电 机控 S
其驱动、保护等电路都集成在一起 ,从而使系统设计简
单 、结 构紧凑 、工作 更加可靠 ,IM 具 有 以下 功能: P