基于电感测量无位置传感器无刷电机实验研究
无刷直流电机无位置传感器的启动研究

通顺 序确定一个相应通 电状态 ,从而使转子转动到
一
法、 升频升压 同步起动法 、 短时检测脉 冲转子定位起 个 预 知 的位 置 。由于在 启动 过 程 中 , 反 电势 法 的三 动 法 等等 f 1 1 。文献 [ 3~8 ] 应 用 了 三段 式 启 动 方 法并 对 路转子位置信号无法有效检测 ,可 以通过信号发生 此 方 法 做 了深 入 的分 析 与研 究 ,本 文 针 对 无位 置传 器产生一系列与三路转子位置信号相对应的同步信 感器无刷直 流电机 三段式启动方 法存在 的问题 , 采 号 , 这三路 同步信号存在有六种组合状态。因此采用 用改进的三段式启动方法 ,以此实现对无位置传感 给 电机预先设定好的某一组合状态通 电一段 时间使 器无刷直流电机平滑、 可靠 的启动 。
一
2 . 2 强 推 加速
强推加速属于外 同步运行 ,其通过 电机外部施 加的同步信号进行换相的运行状态。信号发生器按 预先设 定好的顺 序改变三路 同步信号 的组合 状态 ,
般 是 三 相 六 状 态 星 型连 接 方 式 ,并 采 用 两 两 相 通 各相绕组 的导通 时间逐渐缩短 ,与此同时通过提高 的工作状态 , 其 电枢绕组采用三相形式 , 经由逆变器 电机外施电压改变 P WM 占空比, 从而确保在 电机不
息, 以触发导通相应的功率开关器件 , 从而驱动 电机 2 三段 式启动方 法 正 常 运转 。 对 无 位 置 传 感 器无 刷 直 流 电机 的研 究 主 要 有 反 基 于反 电势 检测 法 的三段 式 起 动 方 法包 括 转 子 电动 势 过 零 点 检测 法 、 反 电 动 势 三次 谐 波 检 测 法 、 电 预定 位 、 加 速和 运行 状 态切 换三 个 阶段 。先 以它控式 感法 、 续流二极管法 、 人 工智 能法 等方 法 【 卜2 J , 目前 应 外 同 步 的方 法从 静 止 开 始 加 速 ,直 到无 刷 直 流 电 机
无位置传感器无刷直流电机转子位置检测的研究
Abtat T ed s n o h osa t rsuewae up ss m ae nPL a en ito u e src : h ei f tecntn— esr t sp y t b sd o C h sbe rd cd,a d h s g p r e n n a
了 1种位 置检 测 电路 的 设 计 方 案 及 其 仿 真 和 实 验 结 果 。 实验表 明 , 系统 可 以 实现 电 机 的 大 范 围 可 调 速 运 转 。 本
关 键 词 : 位置传感 器; 无 无刷 直 流 电机 ; 三段 式起 动 ; 电势 反
中 图 分 类 号 : M 3 T 3
维普资讯
第 2 卷 第 3期 5 20 年 6 07 月
轻 I 执 缀
li htI u ly M a h n r g nd s r c S e y
Vo. 5NO 3 12 .
J n 2 0 u.07
[ 控 ・ 测] 自 检
无位 置传感 器无刷直 流 电机 转子位 置检 测 的研 究
是 由于在 电机 转 子静 止 和低 速 运行 阶段 , 定子 绕 组
根 本不 存在 反 电势 或者 反 电 势信 号 十分 微 弱 , 导致 检 测 电路 很难 检测 到 有效 的反 电势 过零 点 ; 有就 是 在 还
收 稿 日期 : 0 6 0 — 5 2 0 — 9 2
作者简介: 刘
在 总结 上述 研 究方 法 以及 所存 在 问题 的基础 上 ,
号 。反 电势 波形 信号 严格 地反 映无刷 直流 电机转 子 的
本 文提 出了 1种 基 于 T Ms 2 L 2 1 3 0 F 8 2型 号 D P芯 片 S 的全新 控 制方 法 , 制 电机 由零 转 速逐 渐 加 速 至合适 控
无刷直流电机无位置传感器控制系统仿真及试验研究

4 1 0 0 1 2)
要: 建立 了无刷直流电机( B L D C M) 的数学模 型, 设计 了基 于 MA T L A B的 B L D C M无位置传感器仿真
系统 。运用三段位起 动法 实现 电机 的 自起动 , 采用线 反 电动势 过零点检测 法实现 电机换相 。最后 基于 T I 公
0 引 言
传 统 直流 电机 采用 电刷 以 机 械方 式 换 向 , 因
而存 在噪声 、 火花 和无 线 电干扰等 问题 , 而且 制造 成本 高 、 维修 比较 困难 。无 刷 直流 电机 ( B r u s h l e s s D C Mo t o r , B L D C M) 用 电子 换 向替 代 传 统 直 流 电 机 的机械换 向装 置 , 使其 同时 具 有 了传 统 直 流 电 机易 于控 制 , 以及 异步 电机 结构简 单 、 成 本低 的优 点, 从 而在 航空航 天 、 数控机 床 、 机 器人 、 办公 自动
Ke y wo r d s : b r u s h l e s s D C mo t o r ( B L D C M) ; p o s i t i o n s e n s o r l e s s ; b a c k - E MF; t h r e e - s t e p s t a r t i n g p r o c e s s
控制与应用技术 E M 1 3 , 4 0( 1 0 )
无 刷 直 流 电机 无 位 置 传 感 器 控 制 系统 仿 真 及 试 验 研 究
焦 晓雷’ , 高 延丽 , 潘 劲
( 1 .南瑞 集 团公 司, 江 苏 南京
摘
2 1 0 0 0 3 ; 2 .湖 南 电力公 司 检 修 分公 司 , 湖 南 长沙
无位置传感器直流无刷电机控制的研究
护程 序 ,旁路 电阻 R 7主要 用来 对 电路 电流 进行 采
作吉简介:庄乾成 (9 7 17 一) ,男,讲 师,硕士研究生 ,研究方向为智能仪器与测控技术 。 [ 8 第3 卷 91 3 第8 期 2 1— ( ) 01 8下
l
匐 化
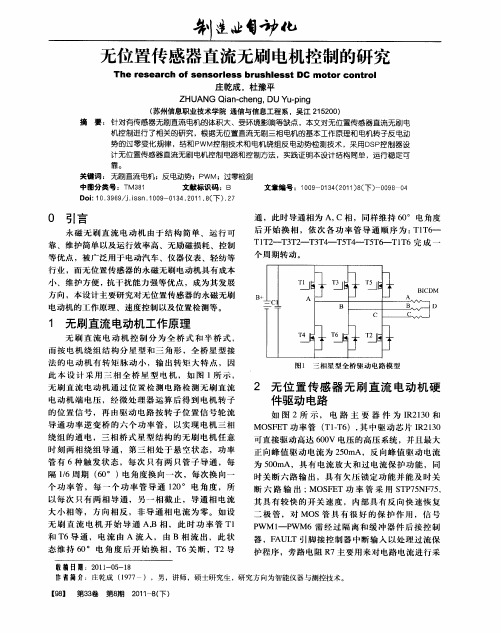
图 2 无刷 直 流 电机 驱 动 电路 示 意 图
个 周期 转动 。
B
1 无刷直流 电动机 工作原理
无 刷 直 流 电动 机 控 制 分 为 全 桥 式 和 半 桥 式 , 而按 电机 绕 组 结 构 分星 型 和三 角形 ,全桥 星型 接 法 的 电动 机 有 转 矩 脉 动 小 ,输 出转 矩 大 特 点 , 因 此 本 设 计 采 用 三 相 全 桥 星 型 电 机 ,如 图 l所 示 ,
为 50 0 mA,具 有 电流 放 大 和过 电流 保 护 功 能 ,同
管 有 6种 触 发 状 态 ,每 次 只 有 两 只 管 子 导通 ,每
隔 1 / 期 (0 6周 6 。)电角度 换 向一 次 ,每 次换 向一
个 功 率 管 ,每 一 个 功 率 管 导 通 10 电 角度 ,所 2。
样 ,阻值 为 4 Q, 转 化为 电压 信 号后 需 经过 放大 8 其
一
无 刷 直 流 电 动机 通 过 位 置 检 测 电 路 检 测无 刷 直 流
图 1 三 相 பைடு நூலகம் 型 全桥 驱动 电路 模 型
电动 机端 电 压 ,经 微 处 理 器 运 算 后得 到 电机 转 子 的 位 置 信 号 ,再 由驱 动 电 路 按 转子 位 置 信 号 轮 流 导 通 功 率逆 变桥 的六 个 功 率 管 ,以实 现 电机 三 相 绕 组 的通 电 ,三 相 桥 式 星 型 结构 的无 刷 电机 任 意 时 刻 两 相 绕 组 导通 ,第 三 相 处 于 悬 空 状 态 ,功 率
无位置传感器的无刷直流电机 (
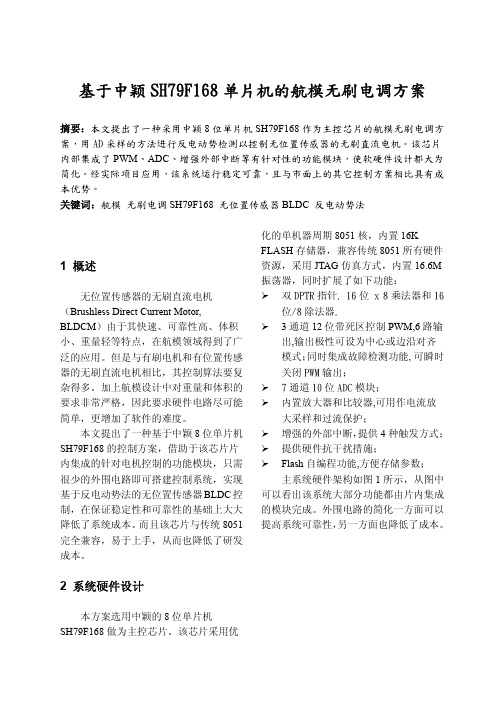
基于中颖SH79F168单片机的航模无刷电调方案摘要:本文提出了一种采用中颖8位单片机SH79F168作为主控芯片的航模无刷电调方案,用AD采样的方法进行反电动势检测以控制无位置传感器的无刷直流电机。
该芯片内部集成了PWM、ADC、增强外部中断等有针对性的功能模块,使软硬件设计都大为简化。
经实际项目应用,该系统运行稳定可靠,且与市面上的其它控制方案相比具有成本优势。
关键词:航模 无刷电调SH79F168 无位置传感器BLDC 反电动势法1 概述无位置传感器的无刷直流电机(Brushless Direct Current Motor, BLDCM)由于其快速、可靠性高、体积小、重量轻等特点,在航模领域得到了广泛的应用。
但是与有刷电机和有位置传感器的无刷直流电机相比,其控制算法要复杂得多。
加上航模设计中对重量和体积的要求非常严格,因此要求硬件电路尽可能简单,更增加了软件的难度。
本文提出了一种基于中颖8位单片机SH79F168的控制方案,借助于该芯片片内集成的针对电机控制的功能模块,只需很少的外围电路即可搭建控制系统,实现基于反电动势法的无位置传感器BLDC控制,在保证稳定性和可靠性的基础上大大降低了系统成本。
而且该芯片与传统8051完全兼容,易于上手,从而也降低了研发成本。
2 系统硬件设计本方案选用中颖的8位单片机SH79F168做为主控芯片。
该芯片采用优化的单机器周期8051核,内置16K FLASH存储器,兼容传统8051所有硬件资源,采用JTAG仿真方式,内置16.6M 振荡器,同时扩展了如下功能:双DPTR指针. 16位 x 8乘法器和16位/8除法器.3通道12位带死区控制PWM,6路输出,输出极性可设为中心或边沿对齐模式;同时集成故障检测功能,可瞬时关闭PWM输出;7通道10位ADC模块;内置放大器和比较器,可用作电流放大采样和过流保护;增强的外部中断,提供4种触发方式; 提供硬件抗干扰措施;Flash自编程功能,方便存储参数;主系统硬件架构如图1所示,从图中可以看出该系统大部分功能都由片内集成的模块完成。
基于电感法无刷直流电动机的起动分析

基于电感法无刷电机转子初始位置的辨识李新华 戈小中 吴 迪(湖北工业大学电气与电子工程学院,,,430068)摘 要 本文研究基于电感法的面装式集中绕组稀土永磁无刷电机转子初始位置的确定方法。
首先介绍了电感法的基本原理,在此基础上分别讨论了定子一相和二相通电时转子磁极极性的确定方法,最后以6极/9槽三相六状态无刷电机为例分析了不同转子平衡位置与电流变化率的大小关系。
关键词 无刷电机;电感法;转子初始位置;电流变化率0.引言无刷直流电动机(以下简称无刷电机)正朝着无位置传感器控制方向发展。
目前无位置传感器无刷电机使用较多的是反电动势法。
反电动势法的主要问题是电机起动瞬间转速为零,反电动势也为零,因此难以通过反电动势获得无刷电机转子的初始位置信息,形成所谓的检测“盲区”。
目前,基于反电动势法的无位置传感器无刷电机比较多地采用“三段式”起动方法。
所谓“三段式”,是指电机起动过程经过转子定位、外同步加速和切换三个阶段。
其中转子定位阶段是使无刷电机某两相通电后所产生的电枢磁场与转子永磁磁场相互作用,迫使转子旋转到某一位置。
这种强制定位要求在短时间内必须向电机绕组通入较大的冲击电流,因此存在明显的问题:一是它受限于无刷电机控制器的容量,控制器的容量太小,不允许使用,控制器容量太大,则会增加系统成本;二是对于重载无刷电机,可能出现定位转矩不足导致定位失败;三是可能在短时间电机出现反转或震荡,对于某些负载来说是绝对不允许的。
电感法是利用面装式和内置式两类无刷电机定子绕组的磁链特性,通过检测不同的观测量来确定转子初始位置的方法。
对于面装式无刷电机,可以利用定子铁心磁路的非线性特性来检测转子位置,即对于不同的转子位置,定子绕组中电流变化率是铁心磁导率的函数,通过检测电流变化率可以得到转子位置信息。
对于内置式无刷电机,由于交、直轴电感与转子位置存在对应关系,采用电流滞环控制检测交、直轴电感,可以得到转子位置信息。
1.电感法的基本原理无刷电机一相的电压平衡方程为a aaa a e dtdi L Ri u ++= (1)式中,u a 为无刷电机一相电压,R 为相电阻,i a 为相电流,L a 为一相电感,e a 为一相反电动势。
无位置传感器无刷直流电机转子位置检测的研究
:
2 电机的起动
由以上分析可以看出, 无刷直流 电机定子绕 组当中的反电动势只有在电机转动的时候才会产
生, 因而电机由静止状态起动 的过程当中, 不能用
≥ ≥一 B 。脚 。 ; I
一
.
.
…
一
:
:
:
:
一
内稳 定运行 。
收稿 日期 :0 60 —8 20 —92
桥式主电路见图 2 1 。
作者简介: 伟(91 ) 男, 刘 18一 , 山东诸城人, 北京科技大学机械工程学院硕士研究生。
一
3 — 6
维普资讯
无位置传感器无刷直流电机转子位置检测的研究
中图分 类号: M312 T 0.
文献标识 码 : A
文章编号 :61 5420 )6 0 6 4 17— 4 (060- 3— 2 0 0
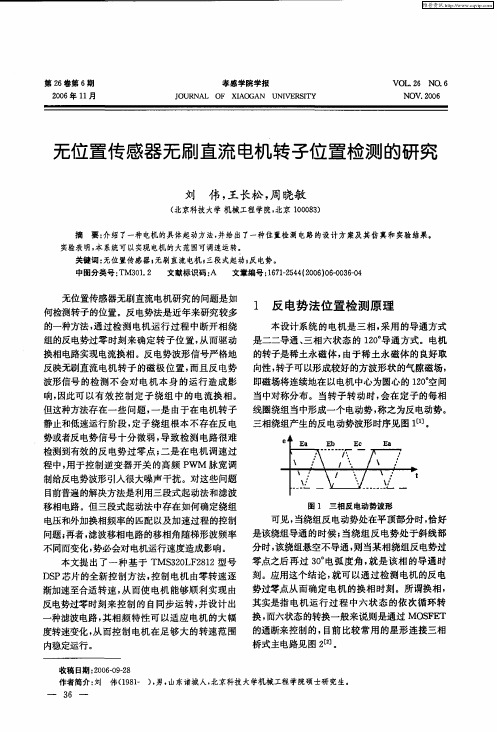
无位置传感器无刷直流电机研究的问题是如 何检测转子的位置 。反 电势法是近年来研究较多
1 反 电势法位置检测 原理
本设计系统 的电机是三相 , 采用的导通方式
:
A, 极对数 p , =5 额定转矩 0 0 . . 5n m。在本实验 中, 采用 E A模块 的 P v WM16 — 六路 P WM 波来
控制六个 MO F T管 的通断, SE 通过 E A模块的 v 通用定时器 T 来确定每个状态的保持时间。通 2
图 2 星形连接三相桥式主电路
刘 伟 , 长松 , 晓敏 王 周
( 京科技 大学 机械工程 学院。 北 北京 1 0 8 ) 0 0 3
摘
要: 介绍 了一种电机 的具体起动方 法, 出 了一种位置检 测 电路 的设计 方案及其 仿真 和实验 结果 。 并给
无位置传感器无刷直流电机的起动控制原理与研究

无位置传感器无刷直流电机的起动控制原理与研究孟光伟,李槐树,熊 浩海军工程大学电气工程系,湖北武汉(430033)摘 要 分析无刷直流电机的电磁转矩和起动控制,针对无位置传感器的永磁无刷直流电机的起动控制,提出了具有升频和电流调节控制的无位置传感器BLDC M的起动控制,其中电流调节控制采用两点式比较器控制。
该起动控制方法不但有能效控制起动电流大小,而且改善了BLDC M开环起动性能,提高了系统的可靠性。
仿真结果验证了该起动控制方法的有效性。
关键词 无刷直流电机;电流;起动;控制中图分类号TM301.2 T M33 文献标识码A 文章编号1008 7281(2010)02 0020 04Principle and Research on Start up Control of Sensorless BLDCMM eng Guangw ei,L iH uaishu,and X iong H aoAbstract The electro m agne tic to r que and start up contro l o f br ush less DC m otors are ana l y zed.For the start up contro l proble m,a contro lm ethod based on increasing frequency and current contr o l is proposed to deal w ith i,t and the current ad j u stab le controlapp lies the t w o po i n t co m parison dev ice.Thism et h od can no t on l y control size of the starti n g current effic iently but a lso i m prove open loop starting perfo r m ance o f BLDC M,so i mpr ove t h e reliab ility of the syste m.The si m u lation results proves that this m ethod is effecti v e.Key w ords B r ush less DC m otor;curren;t start up;control0 引言对于有位置传感器的梯形波永磁无刷直流电机来说,顺利起动是不存在什么问题的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)题目基于电感测量无位置传感器无刷电机实验研究姓名学号所在学院专业班级指导教师日期摘要无传感器控制技术是无刷直流电机控制领域研究的热点。
针对无刷直流电机在静止和低速状态下检测转子位置困难,提出了无刷直流电机采用无位置传感器控制策略时转子位置检测的一种新方法。
基于定子电感是转子位置的函数,用该方法推导出三相无刷直流电动机在两相通电工作方式下的等效电感,并用简单的电子电路实现直流无刷电机无位置传感器的驱动控制。
本文采用DSP 56F8346芯片对无位置传感器的无刷直流电动机控制系统进行了设计,并且进行了相应的系统硬件、软件设计。
关键词:无刷直流电动机;无位置传感器;转子位置检测;电感AbstractSensorless ontrol technology has been a hot research in BLDCM control domain. A novel method for detecting the rotor position of Senseless Brushless DC Motor was presented in view ofthe deficiency in rotor position detecting at standstill or low-speed. The paper, based on the investigation that the statorinductance variation is a function of the rotor position, deduced the equivalent inductance of three-phase brushless DCmotor with two-phase working, and realized the driving control by a simple electric circuit.This paper introduces the design of the sensorless control system for brushless DC motor based on DSP 56F8346, and designs the corresPonding hardware ands oftware eireuit.Key words: brushless DC motor; senseless; rotor position detecting; inductance目录摘要 (Ⅰ)Abstract (Ⅱ)目录 (Ⅲ)第一章绪论 (1)1.1概述 (1)1.1.1 永磁无刷直流电动机概述 (1)1.1.2 无位置传感器无刷电机控制 (2)1.2选题的意义及研究内容 (2)1.2.1 无位置传感器无刷电机起动方法及存在的问题 (2)1.2.2 本项目的研究内容 (3)1.2.3 本人在该项目中所承担的任务 (4)第二章方案的选择及可行性分析 (5)2.1 电感法综述 (5)2.2 若干方案的比较 (5)2.3 方案的选择与推论 (8)第三章系统硬件电路的设计 (12)3.1 实验用无刷电机简介 (12)3.2 逆变电路及通电方式的选择 (12)3.3 控制器用单片机的选型 (14)3.4 硬件电路的设计与制作 (16)第四章系统的软件设计 (18)4.1 总体结构设计 (18)4.2 单片机接口配置及初始化 (19)4.3 主程序设计 (21)4.4 中断程序设计 (23)4.4 PWM模块设计 (24)4.5 数模转换模块设计 (26)第五章系统调试及实验结果分析 (28)5.1 实验平台的构建 (28)5.2 波形检测及滤波器设计 (28)5.3 单片机AD转换分析 (33)5.4 无刷电机初始定位及开环起动实验 (34)总结与体会 (37)致谢 (39)参考文献 (40)第一章绪论1.1.1 永磁无刷直流电动机概述直流电动机主要优点是调速和启动性能好,堵转矩大,因而被广泛应用于各种驱动装置和伺服中。
但是,直流电动机都有电刷和换向器,其间形成的滑动机械接触严重地影响了电机的精度、性能和可靠性,所产生的火花会引起无线电干扰,缩短电机寿命,换向器电刷装置又使直流电机结构复杂、噪音大、维护困难,因此长期以来人们都再寻求可以不用电刷和换向器装置的直流电动机。
随着电子技术的迅速发展,各种大功率电子器件的广泛采用,这种愿望已被逐步实现。
无刷直流电动机利用电子开关线路和位置传感器来代替电刷和换向器,使这种电机既具有直流电动机特性,又具有交流电动机结构简单、运行可靠、维护方便等优点;它的转速不再受机械换向的限制,若采用高速轴承,还可以在高达每分钟几十万转的转速中运行。
因此,无刷直流电动机用途非常广泛,可作为一般直流电动机、伺服电动机和力矩电动机等使用,尤其适用于高级电子设备、机器人、航空航天技术、数控装置、医疗化工等高新技术领域。
无刷直流电动机将电子线路与电机融为一体,把先进的电子技术应用于电机领域,这将促使电机技术更新、更快的发展。
无刷直流电机是由电动机、转子位置传感器和电子开关线路三部分组成,直流电源通过开关线路向电动机定子绕组供电,电动机转子位置由位置传感器检测并提供信号去触发开关线路中的功率开关元件使之导通或截止,从而控制电动机的转动。
图1.1 无刷直流电动机的原理图1.1.2 无位置传感器无刷电机控制无位置传感器无刷直流电机(BLDCM)的控制,是指不依赖位置传感器,通过另外的方式得到转子的位置信号、角速度等状态量,从而确定逆变器功率管的切换,进而对定子绕组进行换相,保持定子电流和反电势在相位上的严格同步的一种控制方式。
在无位置传感器的控制方式中,研究的核心问题主要是如何通过软件和硬件的方法,构建一种转子状态量的检测电路。
由于可以直接测量到的一般只有相电压和相电流这两个量,因此,国内外研究成果所提出的无位置传感器控制方法中,绝大部分都是基于以上两个观测量的。
1.2选题的意义及研究内容1.2.1 无位置传感器无刷电机起动方法及存在的问题一般地,无刷直流电动机的起动有两种方法:外同步方式起动和预定位方式起动。
无刷直流电机的外同步驱动方式需要人为地给电机施加一由低频到高频不断加速的外同步切换信号,使电机以外同步方式由静止逐步加速运转。
这种起动方式需要经过多次的试验才能获得最佳的切换点,而且电路较为复杂。
本系统采用预定位方式起动,以下给出具体的分析。
预定位方式起动分为两个步骤。
第一步为强迫预定位,即在起动开始时给电机一个确定的通电状态,电机定子合成磁势在空间上有一个确定方向,把转子磁极拖到与定子合成磁势轴线重合的位置,实现预定位。
如图1.2(a)所示。
图1.2 转子定位过程示意图第二步为起动,改变电动机的通电状态,使定子合成磁势转向下一个位置,在电磁转矩的作用下拖动转子磁极向定子磁势轴线方向移动。
如图1.2(c)所示。
在转子转动过程中产生电动势,在这个过程中同时投入反电势过零信号检测及相时间控制程序,使电机切换到无刷电机运行方式,从而完成电机的起动。
采用这种起动方式,需要注意的两点问题是:1. 在切换瞬间转速要足够大,保证能够有效地检测到反电势信号。
2. 为可靠定位,需要经过短暂的延时,保证在进入起动阶段前电机转子经过几次摆动后稳定在平衡点上。
由于静止时电机转子位置的不确定性,如果在定位之前其位置恰好处于如图1.2(b)所示位置,转子磁极位于与定子合成磁势轴线垂直的位置时,此时电机转子不会旋转到图1.2(a),定位失败。
这时,采用连续“二次定位方法”可以解决这一问题,即在第一次定位的基础上,接着给出下一个通电状态,这样无论第一次定位成功与否,第二次定位一定是正确的。
1.2.2 本项目的研究内容根据无刷直流电动机理论,转子的位置变化使得磁路的磁阻显著的变化(对采用内嵌式磁钢或凸极转子的电机而言),无刷直流电动机相电感和转子的位置有对应关系。
电感测量法就是基于这种关系,通过检测内嵌式(IPM)BLDCM 绕组电感的变化来判断出转子的位置。
在绕组采用的星形接法的BLDCM中,当其中两相绕组的电感量相等时,反电势正好过零点,此时绕组中性点电位为直流测中点电压,该方法的调速范围很广,调速范围大概能达到500 ~7 500 r /min,这种检测方法的精度高、误差小,但需要对绕组电感进行不断的实时检测,难度因此而增大。
基于电感信息检测位置的策略概述如下:根据无刷直流电动机理论,转子位置的变化使得磁路的磁阻显著变化(对采用内嵌式磁钢或凸极转子的电机而言) ,无刷直流电动机相电感和转子的位置有对应关系。
那么,起动时首先施加激励电压,应用主动检测方法,测得响应相电流,利用相电流和相电感的关系,便可以得到转子的初始位置。
这种方法保证了无刷直流电动机的正确成功起动,同时不需要附加起动电路。
作为初始位置检测的关键,必须找出相电感和转子的位置关系。
当非导通相绕组不存在反电势或反电势远小于外施电压,并且忽略绕组电感压降时,采用非导通相绕组电感检测法。
利用电感与位置角的关系(可以由实验预先测定)查表确定转子的位置,该方法特别适用于变磁阻电机整个速度范围内位置的确定。
1.2.3 本人在该项目中所承担的任务基于对电感法深入的理解,针对三相电机两两通电工作的电感模型进一步推导,提出一种适合凸极无刷直流电动机起动运行并且实现简单的方法。
并对此方法进行推理和实验验证。
在无刷直流电机起动时首先施加激励电压,应用主动检测方法,测得响应相电流,利用相电流和相电感的关系,便测得到转子的初始位置。
作为初始位置检测的关键,还必须找出相电感和转子的位置关系第二章方案的选择及可行性分析2.1 电感法综述在内嵌式( IPM) BLDCM中,电机绕组电感和转子位置θ之间有一定的对应关系,电感测量法就是基于这种关系,通过检测内嵌式( IPM) BLD2CM绕组电感的变化来判断出转子位置。
因为电流的变化率与绕组电感有关,而电感是转子位置和绕组电流的函数,那么转子位置可以从绕组电流及其变化率来得到。
这个方法有个重要优点,即使在零速没有反电势时也可以使用。
利用电感变化检测永磁电机的转子位置有许多困难:1) 对于表面安装的电机,本身没有各向异性特性,只有当电机磁路饱和时,才会有电感随转子位置变化;2) 永磁电机中电流变化率,受到反电势的影响比较大;3) 在永磁电机的一个磁场变化周期中电感随转子位置变化两次,因此在位置检测时会产生不确定的问题。
2.2 若干方案的比较无刷直流电动机的运行是通过逆变器功率器件随转子的不同位置相应地改变其不同触发组合状态来实现的。
因此准确检测转子的位置,并根据转子位置准时切换功率器件的触发组合状态是控制无刷直流电动机正常运行的关键。