《计算机仿真技术》PPT课件
计算机仿真技术1ppt课件

之能重现原系统的各种状态。 ②数学仿真:它就是用数学语言去表述一个系统,并编制
程序在计算机上对实际系统进行研究的过程,这种数学 表述就是数学模型。 ③半实物仿真:也称为混合仿真或物理——数学仿真。
六、计算机仿真的一般过程 (见图1-2所示)
6
§1.1 计算机仿真的基本概念(续2)
3.连续系统和离散系统 ①连续系统:一个系统的状态随时间的变化是连续的。 ②离散系统:一个系统的状态随时间成间断或突然改变。
4.其它分类方法
三、系统模型 系统模型是对实际系统的一种抽象,是对系统本质
(或是系统某种特性)的一种描述。 模型可以分为实体模型和数学模型两大类。
如果要评价一个模型的好坏,一般遵循以下原则: ⑴精确性:相似度
8
§1.1 计算机仿真的基本概念(续4)
⑵合理性:同一系统可建不同模型,关键是对研究问 题有利。
⑶复杂性:在满足精度的前提下,越简单越好。 ⑷应用性:遵循输入量是可以测量的原则。 ⑸鲁棒性:适应的工况范围宽。 五、计算机仿真 1.仿真的概念
2
计算机仿真技术
第一章 概论 第二章 系统建模的基本方法与模型
处理技术 第三章 连续系统的数字仿真 第四章 离散事件系统仿真 第五章 计算机仿真软件
3
第一章 概论
§1.1 计算机仿真的基本概念 §1.2计算机仿真的历史及现状 §1.3计算机仿真的发展与展望
4
§1.1 计算机仿真的基本概念
10
§1.1 计算机仿真的基本概念(续6)
计算机仿真的一般过程可描述如下: ⑴根据仿真目的确定方案 ⑵建立系统的数学模型 ⑶建立仿真模型 ⑷编写仿真程序 ⑸进行仿真实验 ⑹仿真结果分析
计算机仿真技术PPT

对于模型的实验应该说是在进行系统研究中的主要手段,选择在模型上 进行实验的原因主要有以下原因: (1)系统尚未设计出来 (2)某些实验会对系统造成伤害 (3)难以保证实验条件的一致性 (4)费用高 (5)无法复原
1.1.3 模型的建立
1.模型
不管采用何种相似形式,仿真的进行都是在模型的基础上进行的,系统的仿真离不开相关的模型,而模型 的好坏与否对系统的仿真是否真正能够和系统“相似”具有决定性的作用。对于不同的专业和研究特点, 其模型应用的侧重点是不一样的,并且在系统仿真研究的不同阶段,其模型的应用也是不一样的。例如在 系统的理论学习阶段模型侧重于数学模型,而在系统的应用实验阶段,物理模型是不可或缺的。另外,随 着现代科学技术的发展,一些模型并不能用传统的数学模型来表示,而是需要采用描述性的语言来建立所 谓的系统数学模型,例如模糊控制的模型。在科学研究的过程中,也需要先有理论模型分析、半实物模型 实验分析和实物运行验证等阶段。一个好的模型是工程设计或科学研究的基础,建立一个好的数学模型, 需要对所要研究系统的内涵及外延有一个比较清晰的认识,从而使模型能够代表所研究的系统。模型可以 是物理模型、数学模型、混合模型甚至是语言描述模型,在本书中主要讲述或应用数学模型。
1.理论解析法
所谓理论解析法,就是运用已掌握的理论知识对控制系统进行理论上的 分析、计算。它是在进行理论学习的一个必然应用的方法,其通过 理论的学习掌握有关的系统的客观规律,通过理论分析推导来对系 统进行研究。
q1
hq2图1-2 单容箱液位控制系统如图1-2所示的单容水箱液位控制系统,通过体积和液位的平衡关系,可 以得到其数学模型。 (1.1)
2.数学模型的建立
建立系统模型就是(以一定的理论依据)把系统的行为概括为数学的函数关系。下面以一种直线倒立摆 建模的过程来说明建模的基本步骤: 1)确定模型的结构,建立系统的约束条件,确定系统的实体、属性与活动。 在忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成小车和均匀质杆组成的系统,如下 图所示:
计算机仿真技术绪论-第一讲
从系统的综合复杂程度方面考虑,我们可以把系统分为三
类九等。 “三类”是:物理系统;生物系统;人类社会及宇宙。
“九等”是: 框架: 物理系统 最简单的系统、静态的系统,如 桥梁、房子等。
时钟:
控制机械:
按预定规律变化,虽动犹静
能自动调整,偶然干扰使运动偏 离预定要求时,系统能自动调节 回去。
细胞:
计算机仿真,保证系统的性能、质量,为以后从事相关
专业工作打下基础。
考核及要求:
平时(20%)+实验(20%)+期末考试(60%) 平时(20%):①考勤:8分;②作业:7分;③创新:5分。
说明:考勤8分,旷课1次扣1分,点1次名算3次,请假须在课前,请3 次假扣1分,扣完为止;作业6分,1次1分;创新6分,完成思考题,作 业中采用新方法、新思路,作业质量、课堂回答问题等。
本章学习要求:
理解并掌握计算机仿真的概念、分类,计算机数字
仿真的基本过程;
了解计算机仿真的发展历程、应用领域及目前研究、 应用现状;
了解目前所涉及的计算机仿真软件,并重点掌握 MATLAB、ADAMS两个软件。
计算机仿真技术基础概述
1.1 从现实问题开始 1.2 1.3 1.5 系统及系统的分类 系统模型的概念及其分类 计算机仿真的定义
1.4 计算机仿真中的系统建模 1.6 计算机仿真技术发展概要
1.7 小结
从现实问题开始
三峡水库总库容393 亿立方米,总装机容量 1820万千瓦,将是世界上最大的水电站。 但是三峡的安全问题是一个很重要的问题,我 们不可能等到建好后再看它的安全性,用计算机仿 真就可以很好的解决这一问题。
从现实问题开始-计算机仿真能做什么?
1计算机仿真技术绪论PPT课件
1.1 系统仿真的基本概念
1.1.1系统与模型
系统:有相互联系、相互制约、相互依存的若干部分(要 素)结合在一起形成的具有特定功能和运动规律的有机整 体。
系统一般均具有四个性质:
系统的整体性 系统的相关性 系统的目的性 系统的环境适应性
6
1.1.2系统分类
系统的分类方法很多,主要有以下几种分类方法:
静态模型:系统处于平衡状态下的属性
一般表示形式是代数方程、逻辑表达
关系式
动态模型:
系统属性随
时间而发生
变化
连续 系统 模型
随机 模型
确定 模型
线性数学模型和非线性数学模型 微观数学模型和宏观数学模型 集中参数模型和分布参数模型 定常数数学模型和时变数学模型
存储系统模型和非存储系统模型
离散系统 时间离散系统
(1)计算机仿真基本概念、基本分类 (2)系统模型 (3)实现模型的语言(主要讲基本的Matlab 语言以及Simulink) (4)Simulink与数字信号处理、通信原理的 基本结合
2
3、参考书目
① 劳尔(Law.A.M.) .Simulation Modeling and Analysis, 3rd Ed,清华大学出版社.2000.12
版). 科学出版社, 2003年3月 ⑧ 韩利竹 .MATLAB电子仿真与应用.国防工业出版社 .2003
3
4、图书馆可借参考书目 ① Matlab相关 ② Simulink仿真相关
5、联系方式 Tel: Email: xinjie1023@
4
Chapt 1 Introduction
线性系统与非线性系统 定常系统与时变系统
集中参数系统与分布参数系统
计算机仿真-仿真技术1~5章
u ( s)
x
1 s
a
x
y( s)
ax u x 由积分器输入、输出关系得到 y x 由以上得到:由系统模拟图到状态变量图并导出状态
空间表达式的步骤如下: 1、根据系统的传递函数,画出系统模拟图,n阶系统有n 个积分器; 2、把积分器输出定为状态变量x,积分器输入处定为a,
物理仿真系统,其主要功能是按照操作者输入的数据 高精确、高速度的画出实验结果的波形及李萨如图形。数 据输入是随机的,系统会根据坐标画出不同的图形。
(2)、数字仿真是应用性能相似、环境相似的原理,按 照真实系统的数学关系,构造系统的数学模型,并在数学模 (4)人在回路仿真,是操作人员。飞行员等在系统回 型基础上进行试验。其特点是经济、参数修改方便、周期短, 路中进行操纵的仿真实验。要求有模拟生成人的感觉环境 但形式抽象 的各种设备,如视觉听觉等,而且必须实时运行。 (3( )、半实物仿真,又称物理 -数学仿真,硬件(实物) 5)软件在回路仿真,又称嵌入式仿真,软件指实 在回路仿真。可以避免建模的困难,能进一步检查数学建模 物上的专用软件。用于计算机与计算机通过接口对接进行 的准确性和仿真结果的准确性,是航空航天,武器系统仿真 试验, 软件在回路中仿真一般情况下 要求实时运行。
时多种状态空间表达式将对应同一个外部模型。也就
是说对于一个确定的外部模型只对应一个 确定的系统。
•2.2 模型转化-实现问题
因为状态方程是一阶微分方程组,非常适宜用数字 计算机求解,如果一个系统是用状态空间表达式描述的, 便可直接编程求解。然后对于一些复杂的控制系统,其
数学模型往往是通过实验得到的数据,经过辨识确定,
目录
第一章 绪论
• 第一部分 数学建模
计算机仿真技术ppt课件
数学模型
对用户开放的软件中,可以利用器件物理过程
中抽象出的数学方程进行编程,如Saber、
Matlab等。
18
ORCAD/PSpice中器件模型举例
二极管模型
19
20
IGBT模型
21
IGBT模型
22
ORCAD/PSpice、SABER等软件提供 了详细的器件模型,可用于器件 级仿真。
如变流器的小信号模型
电纳模型
如SVC中的TCR(晶闸管控制电抗器)可用等效 电纳表示,来研究SVC对电力系统的补偿作用。
等效受控电源模型
如逆变器可以用可控电压源表示
35
小结
建模是仿真的关键 根据研究目的选择建模层次 建模中对其他层次问题的合理简化 器件级仿真可用PSpice、Saber等软件 装置级仿真中多用器件的简化模型或
器件开、关 电路拓扑结构变化 状态方程周期性变化
结构变化的时刻 (开关动作时刻)
外部控制信号 内部状态
其它非线性
元件非线性
负荷非线性
控制系统非线性
5
非线性微分方程组求解 无解析解
数值计算复杂
非线性 微分方程组
非线性 代数方程组
线性 代数方程组
结果
数 值 积 分
牛顿- 拉夫逊
法
消 去 法
1/(Rc
Rl
)C
iL uC
1
/ L
0
ug
Ug
Rc Rl
C
Rc Rl
C
33
Boost电路状态平均方程
iL uC
(R
计算机仿真技术1

1.1 系统仿真的基本概念
中都有着广泛的应用,但通常认为一个数学模型有两个主要的用 途:首先,数学模型可以帮助人们不断地加深对实际物理系统的 认识,并且启发人们去进行可以获得满意结果的实验;其次,数 学模型有助于提高人们对实际系统的决策和干预能力。 数学模型按建立方法的不同可分为机理模型,统计模型和 混合模型。 机理模型采用演绎方法,运用已知定律,用推理方法建立数 学模型;统计模型采用归纳法,它根据大量实测或观察的数据, 用统计的规律估计系统的模型;混合模型是理论上的逻辑推理和 实验观测数据的统计分析相结合的模型。按所描述的系统运动特 性和运用的数学工具特征,数学模型可分类为线性、非线性、时 变、定常、连续、离散、集中参数、分布参数、确定、随机等系 统模型。
1.2
连续系统仿真技术
根据仿真所遵循的相似原则基本含义,大致可将仿真分为三 大类: 物理仿真:主要是运用几何相似、环境相似条件,构成物 理模型进行仿真。其主要原因可能是由于原物理系统是昂贵的、 或是无法实现的物理场、或是原物理系统的复杂性难以用数学模 型描述的。 数字仿真:运用性能相似,即将物理系统全部用数学模型 来描述,并把数学模型变换为仿真模型,在计算机上进行实验研 究。 半物理仿真:综合运用三个相似原则,把数学模型、实体 模型、相似物理场组合在一起的仿真系统。这类仿真技术又称为 硬件在回路中的仿真(Hardware in the loop simulation)。 由于现代工业和科学技术的发展,单一的物理仿真和数字 仿真往往不能满足其研究目的的要求,而这类物理仿真和数字仿 真的结合称为半物理仿真,则可满足其要求。 本教材的重点是向读者介绍数字仿真。
1.1 系统仿真的基本概念
建立系统概念的目的在于深入认识并掌握系统的运 动规律。因此不仅要定性地了解系统,还要定量地分析、 综合系统,以便能更准确地解决工程、自然界和现代社 会中的种种复杂问题。定量地分析、综合系统最有效的 方法是建立系统的模型,并使用高效的数值计算工具和 算法对系统的模型进行解算。 采用模型法分析系统的第一步是建立系统的数学模 型,所谓数学模型就是把关于系统的本质部分信息,抽 象成有用的描述形式,因此抽象是数学建模的基础。数 学在建模中扮演着十分重要的角色,马克思说过:‚一 种科学只有在成功地运用数学时,才算达到完善的地 步。‛例如集合的概念是建立在抽象的基础上的,共同 的基础使集合论对于建模过程非常有用。这样,数学模 型可以看成是由一个集合构造的。
《计算机仿真技术》讲稿
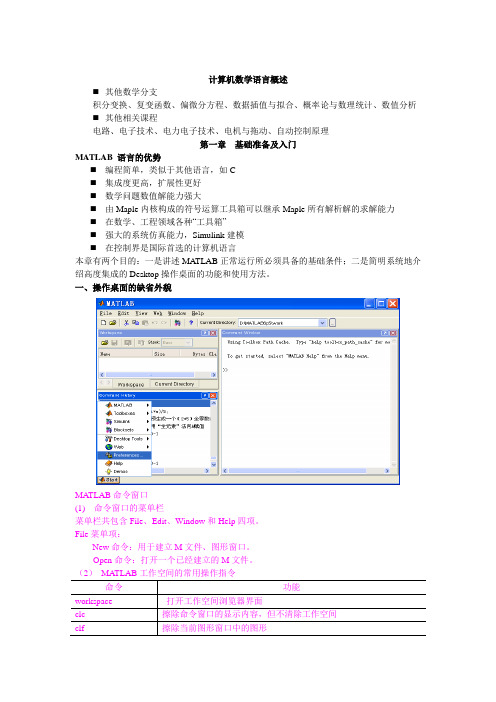
计算机数学语言概述⏹其他数学分支积分变换、复变函数、偏微分方程、数据插值与拟合、概率论与数理统计、数值分析⏹其他相关课程电路、电子技术、电力电子技术、电机与拖动、自动控制原理第一章基础准备及入门MATLAB 语言的优势⏹编程简单,类似于其他语言,如C⏹集成度更高,扩展性更好⏹数学问题数值解能力强大⏹由Maple内核构成的符号运算工具箱可以继承Maple所有解析解的求解能力⏹在数学、工程领域各种“工具箱”⏹强大的系统仿真能力,Simulink建模⏹在控制界是国际首选的计算机语言本章有两个目的:一是讲述MA TLAB正常运行所必须具备的基础条件;二是简明系统地介绍高度集成的Desktop操作桌面的功能和使用方法。
一、操作桌面的缺省外貌MATLAB命令窗口(1) 命令窗口的菜单栏菜单栏共包含File、Edit、Window和Help四项。
File菜单项:New命令:用于建立M文件、图形窗口。
Open命令:打开一个已经建立的M文件。
(2)MA TLAB工作空间的常用操作指令二、通用操作界面Command Window 运行入门 Command Window 指令窗简介1. 最简单的计算器使用法【例1.3.2-1】求23)]47(212[÷-⨯+的算术运算结果。
(1)用键盘在MA TLAB 指令窗中输入以下内容 >> (12+2*(7-4))/3^2(2)在上述表达式输入完成后,按【Enter 】键,该就指令被执行。
(3)在指令执行后,MA TLAB 指令窗中将显示以下结果。
ans = 2[例1.3.2.2] 计算6cos26sin518π++表达式的值。
解:>> 18+(5*sin(pi/6))/(2+cos(pi/6))ans =18.8723【例1.3.2-3】简单矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=987654321A 的输入步骤。
(1)在键盘上输入下列内容A = [1,2,3; 4,5,6; 7,8,9](2)按【Enter】键,指令被执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 编制用lsqcurvefit函数进行参数估计的文件 t=0:10:200; h=[0.0113 0.0162 0.1947 0.5591 0.7050 0.7744 0.9218...
0.9208 0.9852 0.9575 1.0546 0.9873 1.0258 0.9930... 1.0203 1.0605 0.9637 1.0051 0.9878 0.9876 1.0349] tt=0:0.5:200; hh=spline(t,h,tt); x0=[2 10 3]; x=lsqcurvefit('onedt',x0,tt,hh) y=onedt(x,tt); err=sum((hh-y).^2) plot(t,h,'r*',tt,y,'k'); grid
第七章 控制系统的设计
• 控制系统的设计,就是在系统中引入适当的环节, 用以对原系统的某些性能进行校正,使之达到理 想的效果,故又称为系统的校正。
• 常用方法:①状态反馈和状态观测器设计;②串 联校正;③最优控制器设计。
1 状态反馈和状态观测器的设计
1.1 状态反馈 • 状态反馈是将系统的每一个状态乘以相应的
2.2 带延迟的惯性环节的近似 带延迟的惯性环节 G(s) K es
Ts 1
• lsqcurvcfit函数是根据阶跃信号作用下过程输出的形状 进行参数估计。 ⅰ根据所要近似的模型结构编制函数文件fun; ⅱ编制用lsqcurvefit函数进行参数估计的文件
• 例:已知一系统的单位阶跃响应,在t=0:10:200对应的输出为 h=[0.0113 0.0162 0.1947 0.5591 0.7050 0.7744 0.9218...
• 临界比例度法
1.2 状态观测器的设计 • 极点配置基于状态反馈,因此X必须可以观测,
当状态不能观测时,应设计状态观测器来估 计状态。
o (A, B, C)
中
X
不能直接检测,
以o
的
u
和
y
为输入
量,产生
X
渐进于
X,
为o
的状态观测器。
带状态观测器的状态反馈系统
X (A - GC) X GY BU
Y CX
U VKX
B=[1;0;0;0];
C=[1 7 24 24];
disp('原系统的极点');p=eig(A)'
P=[-30;-1.2;-2.4+4*i;-2.4-4*i];
disp('状态反馈增益:');
K=place(A,B,P)
disp('配置后系统的极点:');p=eig(A-B*K)'
D=0;
sysnew=ss(A-B*K,B,C,D)
0],1)/delta;Gc=Gc1+Gc2;
•
例:G(
s)
1 10s
1
e3s
控制器
设计PID
k=1;t=10;tor=3;
[Gc,kc,ti,td]=zz_n1(k,t,tor,‘p id’)
如注被意控:对象的传函不是G(s) K es ,可以将模型经过转换拟合为 Ts 1
该形式,即求出拟合模型的 k , t ,
• 反应曲线法 对于被控对象为带
延迟的一阶惯性环节的 系统,即传递函数表达 式
表一 反应曲线法整定控制器参数
控制器类型 比例度
积分时间 Ti 微分时间 Td
P
K( / T )100%
-
-
PI
1.1K( / T )100%
3.3
-
பைடு நூலகம்PID
0.85K( / T )100%
2.0
0.5
zz_n1函数程序如下: function [Gc,kc,ti,td]=zz_n1(k,t,tor,varargin) controllertype=varargin{1}; switch controllertype
• 带状态观测器的状态反馈系统的设计 (1) 判断原系统是否能观 (2) 求观测器 p为指定的闭环系统极点(A-GC的根) K1=acker(A’,C’,P) G=K1’ k=place(A,B,P)
2 PID控制器设计
2.1 PID控制器参数整定 • Ziegler-Nichols整定方法
1942年Ziegler和Nichols提出了对PID控制器的 参数整定方法,即反应曲线法和临界比例度法。
0.9208 0.9852 0.9575 1.0546 0.9873 1.0258 0.9930...
1.0203 1.0605 0.9637 1.0051 0.9878 0.9876 1.0349]
将该系统近似为 G(s) K es Ts 1
• 编制函数文件onedt函数 function y=onedt(x0,tt) dd=(tt-x0(3)).*(tt>x0(3)); y=x0(1)*(1-exp(-dd/x0(2)))
• 例:已知控制系统的状态方程如下
10 35 50 24 1
A
1
0
0 1
0 0
0 0
,
B
0 0
,C
1
7
24
24
0
0
1
0
0
确定状态反馈矩阵k,使系统的闭环极点配置在
p=[-30 -1.2 -2.4±4i]位置上。
A=[-10 -35 -50 -24;1 0 0 0;0 1 0 0;0 0 1 0];
反馈系数,然后反馈到输入端与参考输入相 加形成控制率,作为受控系统输入。
受控系统的状态空间表达式为
x Ax Bu
y Cx Du
x (A + BK)x Bv y (C + DK)x Dv
若D=0
x (A + BK)x Bv y Cx
•极点配置问题,就是通过选择反馈增益矩阵,将闭环系统的极点恰好配置在根平面 上所期望的位置。 •采用状态反馈对系统任意配置极点的充要条件是原系统完全能控。 •MATLAB命令k=place(A,B,P)
case 'p' delta=k*tor/t;Gc=tf(1/delta,1);kc=1/delta; ti=inf;td=0;
case 'pi' delta=1.1*k*tor/t;ti=3.3*tor;Gc=tf([ti 1],[ti
0])/delta; td=0;kc=1/delta;
case 'pid' delta=0.85*k*tor/t;ti=2*tor;td=0.5*tor;kc=1/delta; Gc1=tf([ti 1],[ti 0])/delta;Gc2=tf([td